Baumgarte T., Shapiro S. Numerical Relativity. Solving Einstein’s Equations on the Computer
Подождите немного. Документ загружается.

5.4 Scalar fields 181
ϕ is called an “inflaton” scalar field. The same equation is also invoked as the evolution
equation for a simple candidate for a dynamical source of dark energy.
88
A popular interaction potential used in many studies is a quartic self-interaction, which
has the form
V
int
(ϕ) =
1
4
λϕ
4
, (5.257)
where λ is a dimensionless coupling constant. While this interaction is often employed
for illustrative purposes, plausible models arising in particle physics, like the Higgs field
in standard electroweak theory, do contain ϕ
4
interactions. The only other possibility
for models involving only scalar fields is an interaction of the form ϕ
3
, since theories
containing ϕ
n
are not renormalizable for n > 4.
89
Much of the astrophysically relevant work on scalar fields in asymptotically flat space-
times involves complex scalar fields. Part of the reason is that massive complex fields can
form stationary equilibrium configurations (boson stars). The stress-energy tensor for a
massive, self-interacting complex field is
T
ab
=
1
2
$
(
∇
a
∇
b
∗
+∇
b
∇
a
∗
)
− g
ab
(
∇
a
∇
a
∗
)
%
− g
ab
V (,
∗
). (5.258)
The corresponding equations of motion are
∇
a
∇
a
− m
2
− λ||
2
= 0 (5.259)
and its complex conjugate. Here we have assumed V (,
∗
) =
1
2
m
2
|
∗
|+
1
4
λ|
∗
|
2
.
The complex scalar field can be split into two real scalar fields according to = ϕ
1
+ i ϕ
2
,
where ϕ
1
and ϕ
2
are real scalar functions. The two real, coupled, second-order equations
that result may then be cast into first-order form by introducing new variables as in
equation (5.250) and proceeding in a similar fashion.
As a final twist, we can endow the complex scalar fields with charge e,aswellasmass
m, and allow them to interact with an electromagnetic field. Express the Faraday tensor for
the electromagnetic field, F
ab
, in terms of the electromagnetic vector potential, A
a
,
F
ab
=∇
a
A
b
−∇
b
A
a
. (5.260)
Define the operator
D
a
≡∇
a
+ ieA
a
. The total stress-energy tensor for this system then
becomes
T
ab
=
1
2
(D
∗
a
∗
)(D
b
) +
1
2
(D
a
)(D
∗
b
∗
) −
1
2
g
ab
(D
c
)(D
c∗
∗
) − g
ab
V (,
∗
)
+
1
4π
F
ac
F
b
c
−
1
16π
g
ab
F
cd
F
cd
,
(5.261)
88
See Carroll (2004), Chapter 8.7 and 8.8, for a discussion.
89
See, e.g., Peskin and Schroeder (1995) for a discussion.

182 Chapter 5 Matter sources
where V (,
∗
) =
1
2
m
2
|
∗
|+V
int
(,
∗
). The corresponding equations of motion
90
for the scalar fields are
∇
a
∇
a
+ ieA
a
(2∇
a
+ ieA
a
) + ie∇
a
A
a
− 2
∂V (,
∗
)
∂
∗
= 0, (5.262)
and its complex conjugate, while Maxwell’s equations for the electromagnetic field are
∇
b
F
ab
= 4π J
a
, (5.263)
where the conserved 4-current J
a
is given by
J
a
= ie
$
D
∗
a
−
∗
D
a
%
. (5.264)
Recall that the remaining Maxwell equations, ∇
[c
F
ab]
= 0, are automatically satisfied by
equation (5.260).
The above scalar and electromagnetic field equations must then be solved in conjunction
with the 3 + 1 equations for the gravitational field to determine the complete foliation of
spacetime. For this purpose the source terms (5.1)–(5.2) must be computed from T
ab
. Once
again, it is convenient to cast the second-order evolution equations into first-order form to
solve them numerically. While the system of equations for a charged, complex scalar field is
not trivial to solve numerically, it is simpler than the relativistic MHD system of equations
for an ionized gas discussed in Section 5.3. For example, there are no shocks with scalar
fields. As a result, a charged scalar field affords the opportunity to explore the behavior of
charged “matter” in the presence of an electromagnetic field in curved spacetime, including
near black holes, with a somewhat more modest computational effort.
90
i.e., the Euler–Lagrange equations, most easily obtained by varying the total Lagrangian with respect to ,
∗
and
A
a
independently; see, e.g., Hawking and Ellis (1973), p. 68.

6
Numerical methods
As we have seen, Einstein’s field equations in 3 + 1 form consist of a set of nonlinear,
multidimensional, coupled partial differential equations in space and time. The equations
of motion of the matter fields that may be present are typically of a similar nature. Except
for very idealized problems with special symmetries, such equations must be solved by
numerical means, often on supercomputers. Just as there is no unique analytic formulation
of the 3 + 1 field equations,
1
there is no unique prescription by which a partial differential
equation may be cast into a form suitable for numerical integration. Standard numerical
algorithms for treating such equations may be found in many textbooks on numerical
methods, as well as in textbooks, monographs and review articles on compuational physics.
This branch of applied mathematics is a rich area of ongoing investigation; it progresses
with each advance in computer technology. It would take us too far afield to review the
subject in any depth here. Instead, we shall present a brief introduction to some of the basic
numerical concepts and associated techniques, focusing on those most often employed
to solve the partial differential equations that arise in numerical relativity. Although our
treatment is rudimentary, we hope that it is sufficient to convey the flavor of the subject,
especially to readers unfamiliar with the basic ideas. Throughout our discussion we shall
refer the reader to some of the literature where further details and other references can be
found.
2
6.1 Classification of partial differential equations
So far in this book our focus has been on casting Einstein’s equations and the equations
of motion for any matter sources into a form that can be solved numerically with standard
techniques. Most of the resulting equations are second-order partial differential equations
and can be classified into three categories: elliptic, parabolic or hyperbolic.
The prototypical example of an elliptic equation is Poisson’s equation,
3
∂
2
x
φ + ∂
2
y
φ = ρ, (6.1)
1
We will explore alternative formulations in Chapter 11.
2
See, e.g., the many references cited in Press et al. (2007), who provide much more discussion of portions of the material
surveyed in this section.
3
For illustrative purposes in this section it is convenient to focus on problems that have at most two independent variables.
183
184 Chapter 6 Numerical methods
where ρ is a source term that may depend on position, or even on φ up to first-order
derivatives. For vanishing sources this equation is Laplace’s equation. We have encountered
elliptic equations, for example, in the Hamiltonian constraint (3.37) and in the maximal
slicing condition (4.12).
An example of a parabolic equation is the diffusion equation,
∂
t
φ − ∂
x
(κ∂
x
φ) = ρ, (6.2)
where κ is the diffusion coefficient. We have seen a parabolic equation when we converted
the maximal slicing condition into the “driver” condition (4.38).
The prototypical example of a hyperbolic equation is the wave equation,
∂
2
t
φ − c
2
∂
2
x
φ = ρ, (6.3)
where c is the constant wave speed.
Exercise 6.1 Verify that any function
φ = g(x + ct) +h(x −ct) (6.4)
satisfies the wave equation (6.3)forρ = 0.
We have encountered hyperbolic equations several times, but often they have been well
disguised and have not appeared exactly in this form. To make contact with those examples
we introduce the first time derivative of φ as a new independent variable, say −k,inwhich
case we can rewrite the wave equation (6.3) as the pair of equations
∂
t
φ =−k
∂
t
k =−c
2
∂
2
x
φ − ρ.
(6.5)
Interestingly, this form is very similar to the pair of 3 + 1 evolution equations (2.134)and
(2.135), except not quite. We can identify φ with γ
ij
and k with K
ij
. The 3-dimensional
generalization of the second space derivative ∂
2
x
φ would the Laplacian of φ. A similar term,
acting like the Laplacian of γ
ij
, is hidden in the spatial Ricci tensor on the right-hand side
of (2.135) (see the fourth term in 2.143), but the Ricci tensor also contains other, mixed
second derivatives. These other terms spoil the hyperbolicity of the evolution equations
in the standard 3 + 1 form (equations 2.134 and 2.135) and motivate the development of
alternative formulations of Einstein’s equations. We will revisit this issue in much greater
detail in Chapter 11.
The form (6.5) is not a particularly elegant representation of a wave equation, since it
contains first-order time derivatives but second-order space derivatives. We can fix that
quite easily by also introducing the space derivative of φ as a new independent variable.
With l ≡ ∂
x
φ we now find the system
∂
t
φ =−k
∂
t
k + c
2
∂
x
l =−ρ
∂
t
l + ∂
x
k = 0,
(6.6)
6.1 Classification of partial differential equations 185
where the last equation holds because the partial derivatives must commute. In a more
compact notation we can write this as
∂
t
u + A · ∂
x
u = S, (6.7)
where u = (φ,k, l) is the solution vector, S = (−k, −ρ,0) is the source vector, and where
A =
00 0
00c
2
01 0
(6.8)
is the velocity matrix. This is a form of the wave equation that is similar to what we have
encountered, for example, in the context of harmonic coordinates (4.44) and (4.45)and
hydrodynamics (5.26).
From the solution (6.4) it is evident that part of the solution φ, namely g, travels along
lines x + ct = constant, while the other part h travels along x − ct = constant. These lines
are called the characteristic curves; they are those curves along which partial information
about the solution propagates. Even if we cannot derive the general solution analytically,
we can find the corresponding characteristic speeds d x/dt from the eigenvalues of the
velocity matrix A. In our example, these eigenvalues are ±c and zero, as we would expect.
4
Exercise 6.2 Instead of introducing k and l it may be more elegant to define a pair
of characteristic variables
u = (∂
t
− c ∂
x
)φv= (∂
t
+ c ∂
x
)φ. (6.9)
Relate u and v to the functions g and h in the general solution (6.4). Then define
u = (φ,u,v) and bring the wave equation into the form (6.7). Show that the velocity
matrix A is now diagonal, and verify that it has the same eigenvalues as before.
To return to our classification of second-order partial differential equations, consider
the general equation
A ∂
2
ξ
φ + 2B ∂
ξ
∂
η
φ + C ∂
2
η
φ = ˜ρ (6.10)
where the coefficients A, B and C are real, differentiable, and do not vanish simultaneously.
Also, the source term ˜ρ may depend on φ, but only up to first-order derivatives. Whether this
equation is elliptic, parabolic, or hyperbolic then depends on the coefficients A, B and C:
5
r
If AC − B
2
> 0, then we can find a coordinate transformation from (ξ,η)tosome(x, y)
that brings equation (6.10) into the form (6.1); such equations are elliptic.
r
If AC − B
2
= 0, then we can find a coordinate transformation that brings equation (6.10)
into the form (6.2); such equations are parabolic.
4
The vanishing eigenvalue in (6.7) is associated with the equation ∂
t
φ =−k which “propagates” information along
x = constant.
5
A similar classification can be defined in higher dimensions.
186 Chapter 6 Numerical methods
r
Finally, if AC − B
2
< 0, then we can find a coordinate transformation that brings
equation (6.10) into the form (6.3); such equations are hyperbolic.
Only hyperbolic equations have real (as opposed to imaginary) characteristics. We also
point out that hyperbolicity comes in various different flavors, which have slightly different
consequences for the properties of the solutions. We briefly discuss these different notions
of hyperbolicity in Chapter 11.1, and refer to the literature
6
for a more detailed and rigorous
treatment.
Exercise 6.3 Consider the radial wave equation
∇
a
∇
a
φ =
1
√
−g
∂
a
(
√
−gg
ab
∂
b
φ) = 0, (6.11)
for the evolution of a scalar field φ = φ(t, r) in a Schwarzschild spacetime, expressed
in Kerr–Schild coordinates (see exercise 2.33). Assume that φ falls of with 1/r at
large radii, and introduce a new variable ≡ rφ. Show that satisfies the equation
−(1 + 2H )∂
2
t
+ 4H∂
r
∂
t
+ (1 − 2H )∂
2
r
−
2H
r
∂
t
+
2H
r
∂
r
−
2H
r
2
= 0
(6.12)
where H = M/r. Verify that this equation is hyperbolic both inside and outside the
event horizon at r = 2M. Then bring this equation into the first-order form (6.7)
and show that the two nontrivial characteristic speeds are
c
1
=−1, c
2
=
1 − 2H
1 + 2H
. (6.13)
Show that these characteristic speeds correspond to the two radial null geodesics
of the Kerr–Schild metric. Integrate the two characteristic speeds to find that the
ingoing and outgoing characteristics satisfy
t + r = constant t − r = 4M ln |r − 2M|+constant, (6.14)
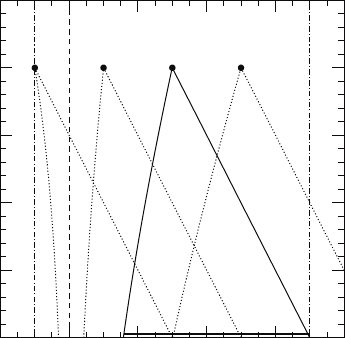
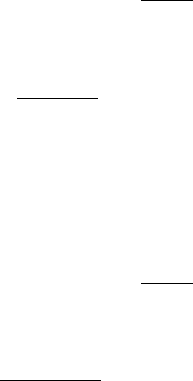
and explain why the name “outgoing” is misleading (see Figure 6.1).
The different types of partial differential equations require different kinds of boundary
and/or initial conditions.
7
Both parabolic and hyperbolic equations constitute intial value
problems, meaning that we have to define initial values of the fields (and possibly their time
derivatives) on a t = constant spatial hypersurface. The differential equations then tell us
how these initial fields evolve with time. We may also have to impose spatial boundary
conditions on the outer boundaries of our computational domain. Elliptic equations, on the
other hand, determine a solution on a given spatial hypersurface. No initial data are required,
but we must supply boundary values at the outer edge(s) of our computational domain.
Boundary conditions can take various forms. For example, Dirichlet conditions specify
the values of the solution functions on the boundary, while Neumann conditions specify
6
See, e.g., Reula (1998).
7
See, e.g., Mathews and Walker (1970), Chapter 8, for more detailed discussion.
6.1 Classification of partial differential equations 187
5
4
4
g
Q
6810
3
P
Q
S
t/M
r/M
2
2
1
0
0
Figure 6.1 Backwards characteristics through several events in the Kerr–Schild metric of a Schwarzschild black
hole. The interval γ
Q
is the domain of dependence of the event Q; the cone defined by γ
Q
and Q is the domain of
determinacy of the interval γ
Q
. The dashed line tracks the event horizon, and the dashed-dotted lines mark some
hypothetical computational boundaries.
their gradients on the boundary. We will encounter various other boundary conditions in
the course of this book.
At this point it is useful to discuss hyperbolic equations in some more detail. The
concept of characteristics leads to the notion of the domain of dependence. For hyperbolic
systems information travels along characteristics. Since no information can travel faster
than the fastest characteristics, the solution at a certain event can only be affected by
those events that lie inside the causal past,orpast cone defined by the fastest ingoing
and outgoing characteristics. In the context of relativity we are quite used to this concept,
since causality demands that an event can only be affected by events in its past light
cone.
For example, consider the wave equation (6.12) for a scalar wave φ that propagates in
a Schwarzschild spacetime expressed in Kerr–Schild coordinates. In Figure 6.1 we plot
several events in this spacetime together with their backward characteristics. Consider the
event Q, whose past characteristics are marked by solid lines. To completely determine
φ(t, r )atQ, we would have to provide initial data φ(0, r)and∂
t
φ(0, r) inside the past
cone defined by the two backward characteristics, namely on the interval γ
Q
. This is the
domain of dependence of the point Q.
In reverse, for any interval γ on the r -axis, there is a region of the spacetime in which
all events depend only on initial data provided on γ . This region is called the domain of
determinacy.Forγ
Q
in Figure 6.1 the domain of determinacy is the cone defined by γ
Q
and the event Q, bordered by solid lines.
188 Chapter 6 Numerical methods
Suppose we want to obtain a solution to the wave equation (6.12). We will have to
provide initial data on an interval γ that extends from a certain radius r
min
to a radius r
max
at, say, t = 0. If we want to construct the solution only in the domain of determinacy of
γ , then the solution is completely determined by the initial data on γ , and no boundary
conditions are needed. This situation, however, is rarely the case. It is more typical that
we would like to construct the solution in the entire domain between r
min
and r
max
for all
t > 0.
For concreteness, imagine we want to find φ in the domain between r
min
/M = 1and
r
max
/M = 9, marked by the dashed-dotted lines in Figure 6.1. The event Q would still be
completely determined by the initial data, but the event S, for example, would not. One
of its backward characteristics intersects the outer boundary at r
max
/M = 9. The event S
is therefore outside the domain of determinacy of γ , and the solution at S depends on
more information than is provided by the initial data. This missing information now has
to be provided by the boundary conditions. The boundary condition at the outer boundary
r
max
has to specify the information that propagates along the ingoing characteristic that
originates on the outer boundary. For example, this could be an outgoing-wave boundary
condition which, as the name suggests, insures that no wave (i.e., no information) enters
the domain through the outer boundary.
The situation is different at the inner boundary r
min
. Consider, for example, the event P,
which lies on the boundary r
min
. Since we have chosen r
min
to be inside the event horizon,
both characteristics originate from a larger r, and neither one intersects the boundary r
min
.
The event P is therefore completely determined by the initial data (and, had we chosen
P at a later time, by the outer boundary condition at r
max
). There is no need to impose a
boundary condition at r
min
, and in fact it would be inconsistent with the equations. This
property will be important when we discuss black hole excision in Chapter 13.1.
Following this general discussion of partial differential equations, we now turn to com-
putational methods that can be used to solve these equations.
6.2 Finite difference methods
Finite difference methods for general applications in computational physics have been
treated in great detail in many references.
8
Specific applications to numerical relativity
have been discussed in a few review articles
9
and many journal articles. Here we provide
a brief introduction that touches on some of the important aspects of the subject.
6.2.1 Representation of functions and derivatives
In a finite difference approximation a function f (t, x) is represented by values at a discrete
set of points. At the core of finite difference approximation is therefore a discretization of
8
e.g., Richtmyer and Morton (1967); Roache (1976); Press et al. (2007).
9
e.g., Smarr (1979a); Evans et al. (1989).
6.2 Finite difference methods 189
the spacetime, or a numerical grid. Instead of evaluating f at all values of x, for example,
we only consider discrete values x
i
. As we discuss in more detail in Section 6.2.2,these
gridpoints may reside either at the centers or the vertices of gridcells, but this distinction is
irrelevant for our purposes in this section. The distance between the gridpoints x
i
is called
the grid spacing x, which in principle may depend on x (or rather x
i
). For uniform grids,
for which x is constant, we have
x
i
= x
0
+ i x. (6.15)
If the solution depends on time we also discretize the time coordinate, for example as
t
n
= t
0
+ nt, (6.16)
where the superscript n denotes the nth time level and should not be confused with an
exponent. In more than one space dimension the other dimensions are discretized in the
same manner. The result of this is a spacetime lattice, on which all functions can be
evaluated. The finite difference representation of the function f (t, x), for example, is
f
n
i
= f (t
n
, x
i
) + truncation error. (6.17)
Here (and only here) we have explicitly added the “truncation error” as a reminder that
f
n
i
only approaches the correct value of f at t
n
and x
i
as the finite difference solution
converges to the correct solution. We will discuss the finite difference error in much more
detail below.
Differential equations involve derivatives, so we must next discuss how to represent
derivatives in a finite difference representation. Consider a partial derivative of f (x) with
respect to x. Assuming that f (x) can be differentiated to sufficiently high order and that it
can be represented as a Taylor series, we have
f
i+1
= f (x
i
+ x) = f (x
i
) + x(∂
x
f )
x
i
+
(x)
2
2
(∂
2
x
f )
x
i
+ O(x
3
). (6.18)
Solving for (∂
x
f )
x
i
= (∂
x
f )
i
we find
(∂
x
f )
i
=
f
i+1
− f
i
x
+
O(x). (6.19)
In the limit x → 0 equation (6.19) is just the definition of the partial derivative, so this
result should not come as a great surprise. The truncation error of this expression is linear
in x, and it turns out that we can do better. Consider the Taylor expansion to the point
x
i−1
,
f
i−1
= f (x
i
− x) = f (x
i
) − x(∂
x
f )
x
i
+
(x)
2
2
(∂
2
x
f )
x
i
+ O(x
3
). (6.20)
Subtracting (6.20) from (6.18)wenowfind
(∂
x
f )
i
=
f
i+1
− f
i−1
2x
+
O(x
2
), (6.21)

190 Chapter 6 Numerical methods
which is second order in x, meaning that the truncation error drops by a factor of four
when we reduce the grid spacing by a factor of 2.
10
The key point is that we are able to
combine the two Taylor expansions in such a way that the leading order error term cancels
out, leaving us with a higher order representation of the derivative. This cancellation only
works out for uniform grids, when x is independent of x. This is one of the reasons
why many current numerical relativity applications of finite difference schemes work with
uniform grids.
Exercise 6.4 The finite difference representation (6.21) being second-order implies
that it should be exact for any arbitrary polynomial up to second order. Verify
that it indeed gives the correct derivative of a polynomial f (x) = a + bx +cx
2
,
independently of x and x.
We call equation (6.19)aone-sided derivative, since it uses only neighbors on one side
of x
i
, and (6.21)acentered derivative. In general, centered derivatives lead to higher order
schemes than one-sided derivatives for the same number of gridpoints. Exercise 6.4 shows
that we can also construct one-sided, higher-order difference schemes, but they will involve
more than two gridpoints.
Exercise 6.5 Construct a second order, one-sided finite difference approximation
of ∂
x
f , i.e., generalize equation (6.19), using only neighbors on one side of x
i
,so
that the truncation error becomes
O(x
2
). Verify your result by showing that it gives
the exact result for an arbitrary polynomial f (x) = a + bx + cx
2
, as in exercise 6.4.
Higher-order derivatives can be constructed in a similar fashion. Adding the two Taylor
expansions (6.18) and (6.20) all terms odd in x drop out and we find for the second
derivative
(∂
2
x
f )
i
=
f
i+1
− 2 f
i
+ f
i−1
(x)
2
+ O(x
2
). (6.22)
This expression is second order because the third order terms in equations (6.18)and
(6.20) cancel out in the addition. An alternative derivation of the second derivative (6.22)
proceeds as follows. First write the first derivative at an indermediate grid point x
i+1/2
as
( f
i+1
− f
i
)/x and similar at x
i−1/2
. The second derivative at x
i
is then the derivative of the
derivative, which we can compute from the difference between (∂
x
f )
i+1/2
and (∂
x
f )
i−1/2
.
The result is equation (6.22), and it is second-order accurate because all differences
involved in the derivation were properly centered.
Numerical relativity codes often use finite-difference representations that are higher
than second order. These can be derived in complete analogy to our above derivation of the
second-order stencils. The key idea is that we want to express the derivative of a function
at a certain grid point, say (∂
x
f )
i
, as a linear combination of function values at this and
10
This is correct only in the limit of small x since for finite x the higher-order error terms also contribute to the
truncation error.