Baumgarte T., Shapiro S. Numerical Relativity. Solving Einstein’s Equations on the Computer
Подождите немного. Документ загружается.

6.2 Finite difference methods 191
neighboring grid points. To do so we can write the function values at these neighboring
grid points in terms of a Taylor expansion about the grid point i, and then combine these
expressions in such a way that all terms up to a desired order cancel out. For centered,
second-order derivatives, we only need the immediate neighbors, i.e., the grid points i + 1
and i − 1, but for higher-order expressions a larger number of grid points is required. As
an example, we ask the reader to work out the first and second derivative of a function to
fourth order in the exercise below.
Exercise 6.6 Show that centered, fourth-order finite difference representations of
the first and second derivatives of a function f are given by
(∂
x
f )
i
=
1
12x
( f
i−2
− 8 f
i−1
+ 8 f
i+1
− f
i+2
) (6.23)
and
(∂
2
x
f )
i
=
1
12(x)
2
(− f
i−2
+ 16 f
i−1
− 30 f
i
+ 16 f
i+1
− f
i+2
), (6.24)
where we have omitted the truncation error,
O(x
4
).
6.2.2 Elliptic equations
As an example of a simple, one-dimensional elliptic equation consider
∂
2
x
f = s. (6.25)
For concreteness, let us assume that the solution f is a symmetric function about x = 0,
in which case we can restrict the analysis to positive x and impose a Neuman condition at
the origin,
∂
x
f = 0atx = 0. (6.26)
(Note that antisymmetry would result in the Dirichlet condition f = 0atx = 0.) Let us
also assume that f falls off with 1/x for large x, which results in the Robin boundary
condition
∂
x
(xf) = 0asx →∞. (6.27)
We will further assume that the source term s is some known function of x.
We now want to solve the differential equation (6.25) subject to the boundary conditions
(6.26) and (6.27) numerically. To do so, we first have to construct a numerical grid that
covers an interval between x
min
= 0andx
max
. Unless we compactify
11
the physical interval
[0, ∞] with the help of a new coordinate, for example ξ = x/(1 + x), finite computer
11
To compactify is to bring the outer boundary at x =∞into a finite value ξ<∞ by means of a coordinate transfor-
mation from x to ξ .
192 Chapter 6 Numerical methods
x
x = 0 x = x
m
a
x
gridpoints gridcells
i = 0 1 2 3 4 5 6 7 8 9
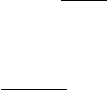
Figure 6.2 A cell-centered grid with eight grid points. The virtual grid points 0 and 9 lie outside of the domain
between x = 0andx = x
max
and do not need to be allocated in the computational grid.
resources will allow a uniform grid to extend to only a finite value x
max
. We then divide
the interval [x
min
, x
max
] into N grid cells, leading to a grid spacing of
x =
x
max
− x
min
N
. (6.28)
We can choose our grid points to be located either at the center of these cells, which would
be referred to as a cell-centered grid, or on the vertices, which would be refered to as a
vertex-centered grid. For a cell-centered grid we have N grid points located at
x
i
= x
min
+ (i − 1/2)x, i = 1,...,N, (6.29)
whereas for a vertex centered grid we have N + 1 grid points located at
x
i
= x
min
+ (i − 1)x, i = 1,...,N + 1. (6.30)
For now, the difference between between cell-centered and vertex-centered grids only
affects the implementation of boundary conditions, but not the finite difference represen-
tation of the differential equation itself. For concreteness, we will use a cell-centered grid
as illustrated in Figure 6.2.
We are now ready to finite difference the differential equation (6.25) together with the
boundary conditions (6.26) and (6.27). We define two arrays, f
i
and s
i
, which represent
the functions f and s at the grid points x
i
for i = 1,...,N .
12
In the interior of our domain
we can represent the differential equation (6.25)as
f
i+1
− 2 f
i
+ f
i−1
= (x)
2
s
i
i = 2,...,N − 1, (6.31)
where we have used the second-order expression (6.22) for the second derivative of f .
At the lower boundary point i = 1 the neighbor i − 1 does not exist in our domain, and,
similarly, at the upper boundary point i = N the point i + 1 does not exist. At these points
we have to implement the boundary conditions (6.26) and (6.27), which can be done in
many different ways.
One approach is the following. Consider, at the lower boundary, the virtual grid point
x
0
, positioned at x =−x/2. The two grid points x
0
and x
1
then bracket the boundary
point x
min
= 0 symmetrically. Using the centered differencing (6.21) we can then write the
12
In many computing languages, including C++, the first element of an array is refered to as i = 0.

6.2 Finite difference methods 193
boundary condition (6.26)as
(∂
x
f )
1/2
=
f
1
− f
0
x
= 0, (6.32)
or
f
1
= f
0
, (6.33)
to second order in x.Fori = 1 we can now insert equation (6.33) into equation (6.31),
which yields
f
i+1
− f
i
= (x)
2
s
i
i = 1. (6.34)
We have used the virtual grid point x
0
to formulate the lower boundary condition, but it
does not appear in the final finite difference equation, and therefore does not need to be
included in the computational arrays.
We can use a similar strategy at the upper boundary. With the help of a virtual grid point
x
N +1
we can write the boundary condition (6.27) to second order in x as
f
N +1
=
x
N
x
N +1
f
N
=
x
N
x
N
+ x
f
N
. (6.35)
We can again insert this into (6.31)fori = N and find
x
i
x
i
+ x
− 2
f
i
+ f
i−1
= (x)
2
s
i
i = N . (6.36)
Equations (6.31), (6.34) and (6.36) now form a coupled set of N linear equations for
the N elements f
i
that we can write as
−110000 0
1 −21 0 0 0 0
0
.
.
.
.
.
.
.
.
.
00 0
001−21 0 0
000
.
.
.
.
.
.
.
.
.
0
00001−21
000001x
N
/(x
N
+ x) − 2
·
f
1
f
2
.
.
.
f
i
.
.
.
f
N −1
f
N
= (x)
2
s
1
s
2
.
.
.
s
i
.
.
.
s
N −1
s
N
(6.37)
or, in a more compact form,
A · f = (x)
2
S. (6.38)
The solution is given by
f = (x)
2
A
−1
· S, (6.39)
where A
−1
is the inverse of the matrix A, so that we have reduced the problem to inverting
an N × N matrix. All equations entering (6.37) are accurate to second order, so that
194 Chapter 6 Numerical methods
the solution f approaches the correct solution with (x)
2
as the leading order error
term.
The matrix A is tridiagonal, meaning that the only nonzero entries appear on the
diagonal and its immediate neighbors. This helps tremendously, since tridiagonal matrices
can be inverted quite easily at small computational cost,
13
even for moderately large N .
In particular, matrix inversion of tridiagonal matrices can be implemented in a way that
does not require storing all N
2
elements (the vast majority of which vanish anyway), but
instead only the diagonal band with its two neighbors.
The situation becomes more complicated in higher dimensions. Consider, for example,
Poisson’s equation in Cartesian coordinates in flat space,
∇
2
f = ∂
2
x
f + ∂
2
y
f = s. (6.40)
We now construct a 2-dimensional grid in complete analogy to the 1-dimensional grid
discussed above. We will denote the N
x
grid points along the x-axis by x
i
, and the N
y
grid
points along the y-axis by y
j
. The functions f (x, y)ands(x, y) are then represented on a
2-dimenional grid and we write, for example,
f
i, j
= f (x
i
, y
j
). (6.41)
If we choose equal grid spacing in the x and y directions, = x = y, we can finite
difference equation (6.40)as
f
i+1, j
+ f
i−1, j
+ f
i, j+i
+ f
i, j−1
− 4 f
i, j
=
2
s
i, j
. (6.42)
As before we can write these coupled, linear equations (together with finite difference
representations of the boundary conditions) as one big matrix equation provided we absorb
the 2-dimensional arrays f
i, j
and s
i, j
into 1-dimensional vector arrays. We can do this, for
example, by constructing vector arrays F
I
and S
I
of length N
x
× N
y
, where the super-index
I ,givenby
I = i + N
x
( j − 1), (6.43)
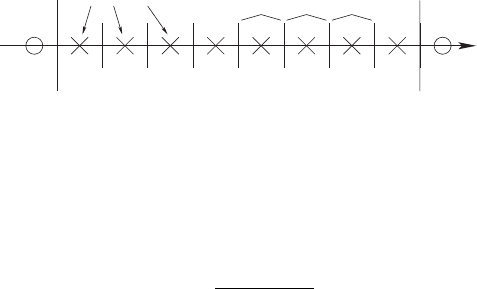
runs over the entire 2-dimensional grid (i, j ) (see Figure 6.3). Given a super-index I we
can reconstruct i and j from
j = I mod N
x
+ 1 (6.44)
i = I − N
x
( j − 1). (6.45)
Exercise 6.7 Consider a 3-dimensional grid of size N
x
× N
y
× N
z
. Construct a 1-
dimensional index I that runs over the entire grid (i, j, k), and provide expressions
that recover i, j and k from I.
13
See, e.g., Press et al. (2007).
6.2 Finite difference methods 195
i
j
I
Figure 6.3 An illustration for a super-index I that sweeps through a 2-dimensional grid (i, j).
We can now write (6.42)as
F
I +1
+ F
I −1
+ F
I +N
x
+ F
I −N
x
− 4F
I
=
2
S
I
(6.46)
and cast the problem as a matrix equation for the vector F
I
. For grid points (i, j)inthe
interior (i.e., away from the boundaries) the equation takes the form
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
··· 1 ··· 1 −41··· 1 ···
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
·
.
.
.
F
I −N
x
.
.
.
F
I −1
F
I
F
I +1
.
.
.
F
I +N
x
.
.
.
=
2
.
.
.
S
I −N
x
.
.
.
S
I −1
S
I
S
I +1
.
.
.
S
I +N
x
.
.
.
. (6.47)
Evidently the matrix A is no longer tridiagonal. If the boundary conditions cooperate (and
they often do), it still is band diagonal, however, which means that the only nonvanishing
elements reside on bands parallel to the diagonal (this is also called “tridiagonal with
fringes”). The size of A is now N
x
N
y
× N
x
N
y
, but special software exists that takes
advantage of the band-diagonal structure, and requires storing only those nonvanishing
bands. In this case we need five bands. Exercise 6.7 shows that even for a 2-dimensional
covariant Laplace operator, as opposed to the flat Laplace operator in equation (6.40), we
are already up to nine nonvanishing bands.

196 Chapter 6 Numerical methods
Exercise 6.8 Instead of Poisson’s equation in flat space as given by equation (6.40),
consider the 2-dimensional covariant version,
∇
2
f =∇
a
∇
a
f = g
ab
∇
a
∇
b
f = g
ab
∂
a
∂
b
f −
a
∂
a
f = s. (6.48)
Here the indices a and b only run over x and y, f is a scalar function, and
a
=
g
bc
a
bc
. Do not assume the metric g
ab
to be diagonal. Retrace the steps that led from
the differential equation (6.40) to the finite difference matrix equation (6.47)and
find the matrix A (away from the boundaries).
Not surprisingly, the problem becomes even more involved in three dimensions. Exercise
6.9 shows that a covariant Laplace operator in three dimensions leads to 19 nonvanishing
bands in matrix A.
Exercise 6.9 Consider Poisson’s equation in three spatial dimensions in flat space,
∂
2
x
f + ∂
2
y
f + ∂
2
z
f = s. (6.49)
(a) Retracing the steps from equation (6.40) to equation (6.47), determine the struc-
ture of the matrix A.
(b) Consider the covariant Laplace equation (6.48) in three dimensions and Cartesian
coordinates and find A for this problem.
The problem becomes so large, especially in three dimensions, that solving the equa-
tions by direct matrix inversion is either impossible or impractical; it simply becomes
too expensive computationally. We therefore have to look for alternative methods of
solution.
Sticking with our example in two dimensions, another approach becomes apparent if
we rewrite equation (6.42)intheform
f
i, j
=
1
4
( f
i+1, j
+ f
i−1, j
+ f
i, j+i
+ f
i, j−1
) −
2
4
s
i, j
. (6.50)
Evidently, finite differencing the flat-space Laplace operator results in each grid function
at every grid point being directly related to the average value of its nearest neighbors. We
could then start with an initial guess for a solution and then sweep through the grid and
update f
i, j
at each grid point according to equation (6.50). This approach is an exam-
pleofarelaxation scheme. Many variations are possible. If we only use values from
the previous sweep on the right hand side of equation (6.50), this scheme is known as
Jacobi’s method; if instead we use values that have already been updated in the cur-
rent sweep, it is called the Gauss–Seidel method, which converges faster. Unfortunately,
neither method converges rapidly enough to be of much practical use, even on modest
grids.
An improvement over these methods is most easily explained in terms of the residual
R
i, j
at each grid point, defined as
R
i, j
= f
i+1, j
+ f
i−1, j
+ f
i, j+i
+ f
i, j−1
− 4 f
i, j
−
2
s
i, j
, (6.51)
6.2 Finite difference methods 197
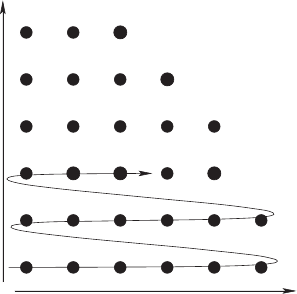
Prolongation Restriction
Figure 6.4 An illustration of a multigrid method.
which measures the deviation between the right-hand and left-hand sides of equation (6.42).
In terms of the residual we can write Jacobi’s method as
f
N +1
i, j
= f
N
i, j
+
1
4
R
N
i, j
, (6.52)
where the superscript N labels the N th sweep through the grid. This recipe implies that
in each sweep we correct each grid point by adding a number that is proportional to the
local residual. The idea behind successive overrelaxation (SOR) is to overcorrect each grid
point, and to modify equation (6.52) according to
f
N +1
i, j
= f
N
i, j
+
ω
4
R
N
i, j
, (6.53)
where ω is some positive number. We refer to ω<1 as underrelaxation, and to 1 <ω<2
as overrelaxation; for values of ω larger than two the scheme does not converge. For a
good choice of ω, with 1 <ω<2, overrelaxation can improve convergence significantly.
For most applications in three dimensions even SOR is not sufficiently fast, so that
alternative techniques are needed. One alternative is a multigrid method, which combines
the advantages of direct solvers and relaxation.
14
In multigrid methods, which we illustrate in Figure 6.4, the numerical solution is com-
puted on a hierarchy of computational grids with increasing grid resolution. The finer
grids may or may not cover all the physical space that is covered by the coarser grids. The
numerical solution is then computed by completing sweeps through the grid hierarchy.
The coarse grid is sufficiently small so that we can compute a solution with a direct solver
(i.e., direct matrix inversion). This provides the “global” features of the solution, albeit
on a coarse grid and hence with a large local truncation error. We then interpolate this
approximate solution to the next finer grid. This interpolation from a coarser grid to a finer
grid is called a “prolongation”, and we point out that the details of this interpolation depend
on whether the grid is cell-centered (as illustrated in Figure 6.4) or vertex-centered. On
the finer grid we can then apply a relaxation method, for example a Gauss–Seidel sweep.
While this method is too slow to solve the problem globally, as we have discussed above,
it is very well suited to improve the solution locally. This step is often called a “smoothing
14
An introduction to multigrid and “full approximation storage” methods, together with references, can be found in
Press et al. (2007).
198 Chapter 6 Numerical methods
sweep”. After this smoothing sweep the solution can be prolonged to the next finer grid,
where the procedure is repeated. Once we have smoothed the solution on the finest grid, we
start ascending back to coarser grids. The interpolation from a finer grid to a coarser grid
is called a “restriction”. The coarser grids now “learn” from the finer grids by comparing
their last solution with the one that comes back from a finer grid. This comparison provides
an estimate for the local truncation error, which can be accounted for with the help of an
artificial source term. On each grid we again perform smoothing sweeps, again improving
the solution because we inherit the smaller truncation error from the finer grids. On the
coarsest grid we again perform a direct solve, as on the finer grids with an artificial source
term that corrects for the truncation error, to improve the global features of the solution.
These sweeps through the grid hierarchy can be repeated until the solution has converged
to a predetermined accuracy.
Another popular method is the conjugate gradient method, which is also designed
for large, sparse matricies. There are discussions in the literature where the method is
implemented for applications in numerical relativity.
15
The good news is that several software packages that provide many of the most efficient
and robust elliptic solvers are publically available. These routines are all coded up, including
for parallel environments.
16
With the help of these packages the user “only” needs to specify
the elements of the matrix A (preferably in some band-diagonal structure so that only the
nonvanishing bands need to be stored) together with the source term s on the right hand
side. The user can then choose between a number of different methods to solve the elliptic
equations.
Before closing this section we briefly discuss nonlinear elliptic equations. Consider an
equation of the form
∇
2
f = f
n
g, (6.54)
where g is a given function and n is some number. Equation (6.54) reduces to the linear
equation (6.40) when n = 0. The equation is still linear for n = 1 and, upon finite differ-
encing, again gives rise to coupled, linear equations that are straighforward to solve by the
same matrix techniques discussed above. We note that equation (4.9) for the lapse function
α in maximal slicing contains a linear source term of this form, with n = 1. But what about
the situation for other values of n, resulting in a nonlinear equation for f ? For example,
the Hamiltonian constraint (3.37) for the conformal factor ψ contains several source terms
with n = 1, n = 5andn =−7.
17
As we shall now sketch, we can solve such a nonlinear
15
See, e.g., Oohara et al. (1997).
16
Examples include PETSc, available at acts.nersc.gov/petsc/,andLAPACK, available at
www.netlib.org/lapack/. Some of the algorithms discussed above are also implemented as modules
(or “thorns”) within Cactus (available at www.cactuscode.org), a parallel interface for performing large-scale
computations on multiple platforms.
17
We remind the reader that, depending on the sign of the exponent n, the solution to equation (6.54) may not be unique;
see exercise 3.8 for an example.
6.2 Finite difference methods 199
equation with very similar matrix techniques, provided we linearize the equation first and
then iterate to get the nonlinear solution.
Let us denote the solution after N iteration steps as f
N
. We could take a very crude
approach and insert f
N
on the right-hand side of equation (6.54) and solve for the next
iteration f
N +1
on the left-hand side. Defining the correction δ f from
f
N +1
= f
N
+ δ f (6.55)
we can write this scheme as
∇
2
δ f =−∇
2
f
N
+ ( f
N
)
n
g. (6.56)
The right-hand side is the negative residual of the equation after N steps,
R
N
=∇
2
f
N
− ( f
N
)
n
g, (6.57)
so equation (6.56) becomes
∇
2
δ f =−R
N
(not recommended). (6.58)
Evidently this is now a linear equation for the corrections δ f , which we can solve with the
methods discussed above. The corrections δ f also become smaller as the residual decreases,
as one would hope. We can do much better, however, and construct an iteration that
converges much faster, by inserting equation (6.55) on the right-hand side of equation (6.54)
as well and using a Taylor expansion
( f
N +1
)
n
= ( f
N
)
n
+ n( f
N
)
n−1
δ f + O(δ f
2
). (6.59)
We truncate after the linear term (so that the resulting equation is still linear), insert into
(6.54), and find
∇
2
δ f − ng( f
N
)
n−1
δ f =−R
N
(recommended). (6.60)
We can think of the difference between equation (6.58) and equation (6.60)ashaving
truncated the Taylor expansion after the first term on the right-hand side of equation (6.59),
and thereby retaining only the first term on the left-hand side in equation (6.60). Clearly
we expect faster convergence for the latter, which usually is the case.
The price that we pay for the faster convergence is the new term involving δ f that
appears on the left-hand side of (6.60). The good news is that this term can be dealt with
quite easily. Equation (6.60)isoftheform
∇
2
f + uf = s, (6.61)
where, comparing with the model equation (6.25) that we considered above, the term uf
is new. The exact finite difference form of this equations depends on what kind of Laplace
operator we are dealing with. For a flat Laplace operator in two dimensions, for example,
we could finite difference (6.61)as
f
i+1, j
+ f
i−1, j
+ f
i, j+i
+ f
i, j−1
+ (u
i, j
− 4) f
i, j
=
2
s
i, j
. (6.62)

200 Chapter 6 Numerical methods
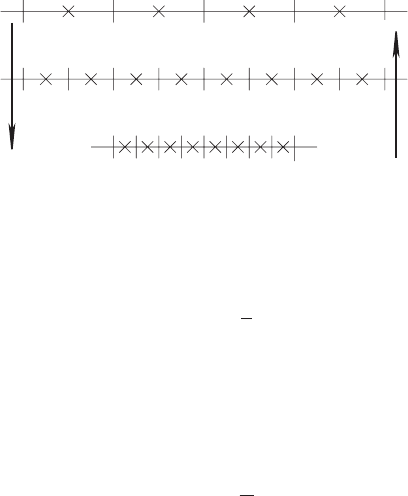
n
n+1
j j+1
Figure 6.5 The finite-differencing stencil for the “forward-time centered-space” (FTCS) differencing scheme.
Comparing with (6.42) we see that the new term uf only affects the coefficient of the
element f
i, j
. In the resulting matrix equation (6.47) we can therefore account for this
new term by adding u
i, j
to the diagonal of the matrix A. To solve equation (6.60), we
simply subtract ng( f
N
)
n−1
from the diagonal. This can be done very easily, and leads to a
significantly faster iteration than using equation (6.58).
6.2.3 Hyperbolic equations
We now turn to hyperbolic equations. As a model of hyperbolic equations, consider a
“scalar” version of equation (6.7)
∂
t
u + v∂
x
u = 0. (6.63)
Equation (6.63) is sometimes referred to as the model advective equation, for obvious
reasons. For simplicity it does not contain any source terms, and the wave speed v is
constant. The equation is satisfied exactly by any function of the form u(t, x) = u(x − vt).
In contrast to the elliptic equations of Section 6.2.2 the equation has a time derivative in
addition to the space derivative, and thus requires initial data. A finite difference represen-
tation of this time derivative must involve at least two neighboring time levels. We will
first consider two-level schemes.
As we have seen in Section 6.2.1, we can achieve a second-order differencing scheme
for the space derivative in equation (6.63) by using the centered finite difference expression
(∂
x
u)
n
j
=
u
n
j+1
− u
n
j−1
2x
+
O(x
2
). (6.64)
Since we have decided to use a two-level scheme, a one-sided and first-order expression
(∂
t
u)
n
j
=
u
n+1
j
− u
n
j
t
+
O(t) (6.65)
for the time derivative will have to suffice for now. Inserting both finite-difference repre-
sentations into equation (6.63) we can solve for u
n+1
j
and find
u
n+1
j
= u
n
j
−
v
2
t
x
(u
n
j+1
− u
n
j−1
). (6.66)
For reasons that are quite obvious this differencing scheme is called forward-time centered-
space, or FTCS (see Figure 6.5). It is an example of an explicit scheme, meaning that we