Baumgarte T., Shapiro S. Numerical Relativity. Solving Einstein’s Equations on the Computer
Подождите немного. Документ загружается.

6.3 Spectral methods 221
Exercise 6.24 Given a function f (x) expanded as in equation (6.127), we can also
write its derivative f
(x)as
∂
x
f (x) =
N
l=0
˜
f
l
T
l
(x). (6.134)
Combining equations (6.128)and(6.131) shows that the expansion coefficients
˜
f
k
are related to the coefficients
˜
f
k
by
˜
f
l
=
N
k=0
D
lk
˜
f
k
. (6.135)
Show that the
˜
f
k
’s satisfy
˜
f
l
= 2(l + 1)
˜
f
l+1
+
˜
f
l+2
l < N − 1; l > 0. (6.136)
This recurrence relation can be used to find the derivative of a function f (x) directly
from its spectral coefficients
˜
f
l
.
Inserting equation (6.135)into(6.134)wenowhave
∂
x
f (x) =
N
k=0
N
l=0
˜
f
k
D
lk
T
l
(x), (6.137)
demonstrating that we can express the first derivative of f (x) in terms of Chebychev
polynomials simply by applying the matrix D
lk
to the spectral coefficients
˜
f
k
. Luckily, we
already have developed all the tools to construct similarly the second derivative of f (x)as
it appears in the differential equation (6.126),
∂
2
x
f (x) = ∂
x
N
k=0
N
l=0
˜
f
k
D
lk
T
l
(x)
=
N
k=0
N
l=0
˜
f
k
D
lk
∂
x
T
l
(x)
=
N
k=0
N
l=0
N
m=0
˜
f
k
D
lk
D
ml
T
m
(x). (6.138)
Defining D
2
mk
as the square of the matrix D
lk
,
D
2
mk
=
N
l=0
D
ml
D
lk
, (6.139)
equation (6.138) reduces to
∂
2
x
f (x) =
N
k=0
N
m=0
˜
f
k
D
2
mk
T
m
(x), (6.140)
showing that we can construct the second derivative of f (x) by applying D
lk
to the spectral
coefficients
˜
f
k
twice.
222 Chapter 6 Numerical methods
Inserting equation (6.140) into the differential equation (6.126) then yields
N
k=0
N
m=0
˜
f
k
D
2
mk
T
m
(x) = s(x). (6.141)
In a pseudo-spectral method we now evaluate this equation at the N + 1 collocation points
x
i
. Defining
A
ki
≡
N
m=0
D
2
mk
T
m
(x
i
), (6.142)
we can write the resulting N + 1 equations as the simple matrix equation
N
k=0
A
ki
˜
f
k
= s
i
, (6.143)
where s
i
= s(x
i
), hence
˜
f
k
=
N
i=0
A
−1
ki
s
i
. (6.144)
We thus have reduced the problem to matrix inversion.
The attentive reader will recall that for the finite-difference methods in Section 6.2.2
we also reduced the elliptic differential equation into a set of linear equations (e.g., equa-
tion 6.37). However, to achieve the same accuracy in spectral and finite-difference methods
we often need a much smaller number N of basis functions than the number N of grid
points. For many applications spectral methods converge exponentially with increasing
N .
32
The matrix A
ki
is therefore much smaller than the typical matrices encountered for
finite-difference methods and can be inverted much more easily and faster.
So far we have ignored boundary conditions. They can be accounted for by replacing
some of the equations in (6.143) with conditions that enforce the boundary conditions.
Imagine, for example, a boundary condition
f (1) = 0. (6.145)
Since all Chebychev polynomials satisfy T
n
(1) = 1, we would then have to require
N
k=0
˜
f
k
= 0. (6.146)
This constraint can be enforced by replacing the row in A
ki
that corresponds to the
collocation point x
i
= 1 with 1’s.
For elliptic equations containing nonlinear terms we can construct the solution iteratively
as we described towards the end of Section 6.2.2 for finite differencing. For an equation
32
See, e.g., Press et al. (2007).
6.3 Spectral methods 223
of the form (6.54), for example, we can linearize the equation around the approximate
solution f
N
after N iteration steps, find the linear equation (6.60) for the next correction
δ f , and then solve this linear equations for δ f with the techniques described above.
6.3.5 Initial value problems
Spectral methods applied to initial value problems typically treat the space and time
coordinates differently and expand only the space-dependence into basis functions. This
choice is quite similar, in fact, to the idea behind the method of lines which we discussed
at the end of Section 6.2.3 in the context of finite difference methods. This approach again
converts partial differential equations into a set of ordinary differential equations in time,
in this case for the spectral expansion coefficients.
As in Section 6.2.3, consider the model advective equation
∂
t
u + v∂
x
u = 0, (6.147)
where the function u = u(t, x) depends on both time and space. Using Chebychev poly-
nomials we expand this function as
u(t, x) u
(N )
=
N
k=0
˜
u
k
(t)T
k
(x), (6.148)
which, when inserted into equation (6.147), yields
∂
t
N
k=0
˜
u
k
(t)T
k
(x) + v
N
k=0
˜
u
k
(t)∂
x
T
k
(x) = 0. (6.149)
We again have to evaluate this equation N + 1 times to derive N + 1 equations for the
N + 1 spectral coefficients. In a Galerkin method we would take the scalar product of the
equation with the basis functions T
l
(x) themselves, which would yield linear equations for
the spectral coefficients
˜
u
k
(t). In numerical relativity, pseudo-spectral methods are more
commonly used, for which we evaluate equation (6.149)attheN + 1 collocation points
X
i
given by equation (6.119). We then find equations for the functions u
i
according to
∂
t
u
i
(t) =−v
N
k=0
˜
u
k
(t)T
k
(X
i
) =−v
N
l=0
˜
u
l
(t)T
l
(X
i
), (6.150)
where we have expressed the derivatives T
k
(X
i
) in terms of the Chebychev polynomials
themselves using equations (6.131) and (6.135).
We can evaluate the right-hand side of equation (6.150) as follows. For a set of functions
u
i
(at a certain time t) use equation (6.122) to find the spectral coefficients
˜
u
k
, then find
the
˜
u
k
(for example from the recurrence relation 6.135), and finally perform the sum in
equation (6.150). Using Chebychev polynomials both the first and last step can be carried
out with fast Fourier transforms.
224 Chapter 6 Numerical methods
Since we have expressed the spatial derivative of u in terms of derivatives of the
basis functions T
k
(x), the equations (6.150) can now be treated like ordinary differential
equations for the u
i
, and a variety of methods can be used for their integrations. Given
that we have invested a fair amount of effort in the accurate representation of the spatial
derivatives, it would be a waste not to treat the time derivatives with some care as well.
It is therefore reasonably common to integrate these equations with an explicit fourth-
order Runge–Kutta method. As for the explicit finite difference methods discussed in
Section 6.2.3 the time step t is limited by a Courant stability criterion. For the uniform-
grid methods in Section 6.2.3 we found that typically t ∼ x ∼ N
−1
. Here, however, the
collocation points cluster near the domain boundaries – from equation (6.119), the distance
x between the collocation points X
0
and X
1
, for example, is 1 −cos(π/N) ∼ N
−2
–
which reduces the limit to t ∼ N
−2
. This is less severe than it may sound, since N
is typically much smaller for spectral methods than for finite difference methods, and if
needed this problem can also be avoided by implementing implicit methods.
6.3.6 Comparison with finite-difference methods
It may be useful to include a brief comparison between the respective advantages and dis-
advantages of finite-difference and spectral methods. There are other methods for solving
partial differential equations, of course, like finite element, Monte Carlo and variational
methods, but since these have not been adopted widely in numerical relativity we omit a
discussion of them.
The most attractive feature of spectral methods is the fact that, for many situations,
solutions converge exponentially with the number of basis functions. That means that for
a fixed allocation of computational resources, spectral methods can often achieve a much
higher accuracy than finite difference methods, which yield solutions that converge only
as some power of the number of grid points.
One of the disadvantages of spectral methods is that they can work well only when the
solution functions are well represented by the basis functions. In particular this means
that the solutions should be smooth, meaning that the functions and all their derivatives
must be continuous (unless the adopted basis functions are chosen to reflect any known
discontinuous behavior). If this is not the case, so-called “Gibbs phenomena” may appear
(i.e., spurious oscillations of the spectral solution near discontinuities), and this behavior
adversely affects the convergence of the method.
As a consequence, spectral methods have been most successful for situations in which
the solutions are indeed smooth. One example in the context of numerical relativity are
initial data for binary black holes (see Chapter 12), for which all gravitational fields are
expected to be smooth outside of the black holes. For binary neutron star initial data the
situation is already more complicated, since the matter variables may have discontinuous
derivatives on the stellar surfaces. This problem can be circumvented by introducing
“surface-fitting” coordinate patches. The stellar interiors and exteriors are then handled
6.4 Code validation and calibration 225
on different computational domains. In each one of them the solutions are smooth, and
the different patches are glued together with suitable boundary conditions on the stellar
surfaces. This approach works well as long as the surface does not develop cusps, which
may result in Gibbs phenomena. This may happen, for example, just before the star
is tidally disrupted by a binary companion. We will discuss techniques and results for
binary neutron star initial data in Chapter 15, and for black hole-neutron star binaries in
Chapter 17.1.
The most attractive features of finite-difference methods are their ease of implementation
and their robustness. In general, it is reasonably straightforward to implement at least
a low-order finite-difference algorithm, and in general these algorithms are reasonably
robust, and are less sensitive to the properties of the solutions than spectral methods.
These observations probably explain why, with some notable exceptions, most dynamical
simulations of binary mergers have been carried out with finite difference simulations. This
is especially true of simulations involving fluid stars, where the presence of discontinuous
shocks proves particularly challenging for spectral methods. We will describe simulations
of binary black holes in Chapter 13, for binary neutron stars in Chapter 16, and for black
hole-neutron star binaries in Chapter 17.2, where we will summarize some of the different
methods used to perform them.
6.4 Code validation and calibration
Before closing this chapter we should briefly discuss some general strategies for testing
numerical codes. One obvious code test is to use the code to treat a case in which an
analytical solution, or at least some very accurate numerical solution, is available for
comparison. For example, a code that is designed to evolve multiple spinning black holes
could be used to simulate a single, stationary black hole. The results could then be compared
to a stationary Kerr spacetime. Even if we were careful to employ only gauge-invariant
quantities in performing such comparisons, we inevitably would find that the numerical
results do not agree exactly with the analytical results. The reason for the discrepancy
would be that, with very few exceptions, any numerical calculation will always have some
truncation error. Comparing a single simulation with an analytical solution is therefore
not very meaningful, because it would not be possible to distinguish a deviation caused by
a coding error from a truncation error. A more meaningful test, one that can distinguish
between coding mistakes and truncation error, is performing a sequence of simulations and
using the sequence to check the convergence of the results to an analytical solution. The
point is that the truncation error decreases in a predictable way with increasing numerical
resources, while coding mistakes do not. We have already relied on such a convergence
test in Chapter 5.2.4 to calibrate a relativistic MHD code.
Focusing on finite difference methods for the remainder of the section, we will denote
the numerical solution at a point (t, x), achieved with a grid spacing h,asu
h
(t, x). We
assume that we can express this solution as a Taylor expansion about the analytical solution
226 Chapter 6 Numerical methods
u(t, x), in which case we may write
u
h
(t, x) = u(x, t) + hE
1
+ h
2
E
2
+ h
3
E
3
+ O(h
4
), (6.151)
where the error terms E
i
are independent of the grid spacing h. For concreteness, imagine
that we constructed a second-order scheme, in which case E
1
should be zero and the
numerical error should scale with h
2
,
u
h
(t, x) − u(x, t) = h
2
E
2
+ h
3
E
3
+ O(h
4
). (6.152)
Now consider redoing the same calculation with a higher resolution, for example with a
new grid spacing h/2. The new error should then be
u
h/2
(t, x) − u(x, t) =
1
4
h
2
E
2
+
1
8
h
3
E
3
+ O(h
4
), (6.153)
or
4(u
h/2
(t, x) − u(x, t)) = h
2
E
2
+
1
2
h
3
E
3
+ O(h
4
). (6.154)
Doubling the resolution again we find
16(u
h/4
(t, x) − u(x, t)) = h
2
E
2
+
1
4
h
3
E
3
+ O(h
4
). (6.155)
As we increase the resolution, the higher order terms keep decreasing, so that the right
hand sides converge to h
2
E
2
(where h is the original grid spacing). In a convergence test
to an analytical solution we test this behavior by plotting the rescaled errors
2
2k
(u
h/k
(t, x) − u(t, x)) → h
2
E
2
, (6.156)
which will converge only if the implementation is indeed second-order accurate with
E
1
= 0. This is a very strong test, since many coding mistakes and typos will result in
errors that, even if they are small, do not converge away.
For a convergence test to an analytical solution we need to compare the numerical
solution for at least three different resolutions. For the two finer resolutions the rescaled
errors should then be closer to each other than for the two coarser resolutions. In fact,
many second-order schemes are symmetric, in which case the third-order error terms
E
3
vanish also, and the rescaled errors converge to O(h
4
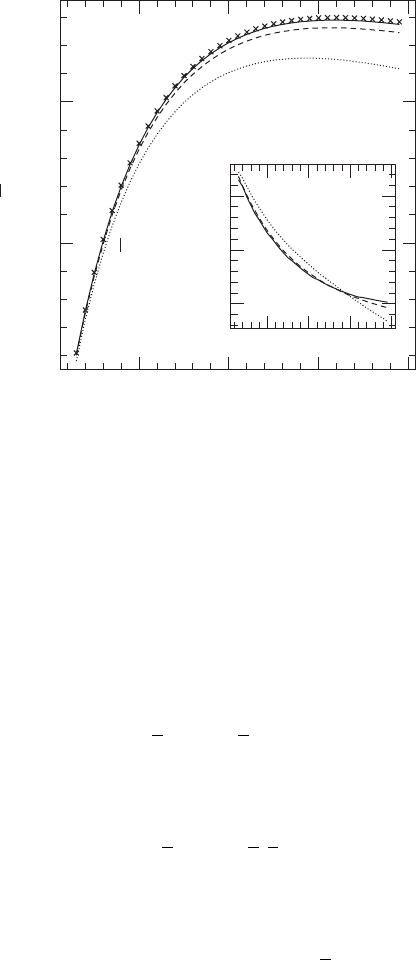
). As an example, we show in
Figure 6.12 a test for a code designed to construct binary black hole-neutron star quasiequi-
librium initial data.
33
In this test the code, which solves partial differential elliptic equations
in three spatial dimensions, is shown to converge, in the absence of a black hole, to the
Oppenheimer–Volkoff solution for a spherical equilibrium star (see Chapter 1.4). The lat-
ter is not an analytical solution, but as a solution to a coupled set of ordinary differential
equations in one dimension it can be computed to sufficiently high accuracy so serve as a
“semi-analytical” solution in this test.
33
Baumgarte et al. (2004); see Chapter 17.1.
6.4 Code validation and calibration 227
0.15
0.1
0.1
−
0.015
∆
M
0
−
0.01
−
0.005
0.1
0.2
0.2
0.3
0.3
0.4
0.4
q
M
0
Figure 6.12 The rest mass
¯
M
0
of a spherical n = 1 polytrope as a function of a density parameter q for three
different grid resolutions h (dotted line), h/2 (dashed line) and h/4 (solid line), computed with a code that solves
elliptic equations in three dimensions for quasiequilibrium binaries. The crosses mark the high-accuracy solution
obtained by solving the Oppenheimer–Volkoff ordinary differential equations for an equilibrium star in
spherical symmetry. The inset shows the rescaled numerical errors, which clearly converge to a single line,
establishing second-order convergence of the code. [From Baumgarte et al. (2004).]
Interestingly, neither an analytical nor a semi-analytical solution is needed to test the
convergence of a code. In a self-consistent convergence test we can eliminte the unknown
analytical solution u(t, x)in(6.152) by subtracting (6.153)
u
h
− u
h/2
=
3
4
h
2
E
2
+
7
8
h
3
E
3
+ O(h
4
). (6.157)
We similarly find
4(u
h/2
− u
h/4
) =
3
4
h
2
E
2
+
1
2
7
8
h
3
E
3
+ O(h
4
). (6.158)
The higher-order error terms again keep decreasing, and the rescaled differences approach
2
2k
(u
h/k
(t, x) − u
h/(2k)
(t, x)) →
3
4
h
2
E
2
. (6.159)
This means that we can again check the convergence of our code, but this time completely
independently of any analytical solution. Clearly, this is a very powerful tool. Often we
can use the convergence to an analytical solution to test codes in certain regimes for which
an analytical solution can be found. But these tests may or may not test all aspects of
the computational algorithm. Self-consistent convergence tests, on the other hand, can be

228 Chapter 6 Numerical methods
used to test all parts of a code. The one down-side of a self-consistent convergence test,
compared to the convergence to an analytical solution, is that we now need at least four
different grid resolutions, so that we can form three pairs whose convergence we can test.
34
Exercise 6.25 Sometimes it is useful to “invent” an analytic solution where none
is known in order to perform a convergence test on a code. Consider the nonlinear,
flat-space elliptic equation (6.54) for the function f (r):
∇
2
f = f
n
g, (6.160)
subject to boundary conditions
∂
r
f = 0, r = 0, (6.161)
∂
r
(rf) = 0, r =∞, (6.162)
where r
2
= x
2
+ y
2
+ z
2
.Taken = 4 for definiteness. Here we will write and test a
code to solve this equation in one dimension (spherical symmetry), two dimensions
(axisymmetry), or three dimensions.
(a) Choose the arbitrary analytic function
f =
r
2
1 + r
3
, (6.163)
constructed to satisfy the boundary conditions, substitute it into equation (6.160)
and solve for g. Given this analytic source function g we now have an exact solution
f to equation (6.160) that satisfies the appropriate boundary conditions.
(b) Use the analytic source function g derived in part (a) to solve equation (6.160)
by finite-differencing. You may need to linearize the equation first, as discussed at
the end of Section 6.2.2, and iterate the solution.
(c) Perform a convergence test to check your code by comparing with the analytic
solution. Does your code converge at the expected convergence rate?
34
We also point out that any typo or mistake in an analytic equation that propagates into a high-order code will not be
discovered by a self-consistent convergence test. Only by comparison with an analytic solution can a convergence test
alone reveal such an error.

7
Locating black hole horizons
Black holes are characterized by the horizons surrounding them. Clearly, then, the numer-
ical simulation of black holes requires the ability to locate and analyze black hole horizons
in numerically generated spacetimes. In this chapter we first review different concepts of
horizons in asymptotically flat spacetimes, and then discuss how these horizons can be
probed numerically.
7.1 Concepts
Several different notions of horizons exist in general relativity. The defining property
of a black hole is the presence of an event horizon (Section 7.2), but, as we will
see, apparent horizons (Section 7.3) also play an extremely important role in the con-
text of numerical relativity. In addition, the concepts of isolated and dynamical hori-
zons (Section 7.4) serve as useful diagnostics in numerical spacetimes containing black
holes.
A black hole is defined as a region of spacetime from which no null geodesic can escape
to infinity. The surface of a black hole, the event horizon, acts as a one-way membrane
through which light and matter can enter the black hole, but once inside, can never escape.
It is the boundary in spacetime separating those events that can emit light rays that can
propagate to infinity and those which cannot. More precisely, the event horizon is defined
as the boundary of the causal past of future null infinity.
1
It is a 2 + 1 dimensional
hypersurface in spacetime formed by those outward-going, future-directed null geodesics
that neither escape to infinity nor fall toward the center of the black hole. The event horizon
is a gauge-invariant entity, and contains important geometric information about a black
hole spacetime.
The intersection
H of the event horizon with a t = constant spatial hypersurface ,
i.e., the spatial “snapshot” of the horizon at the instant of time associated with ,forms
a closed, two-dimensional surface, whose proper surface area we denote as
A.Thearea
theorem
2
of classical general relativity states that this surface area can never decrease in
time,
δ
A ≥ 0, (7.1)
1
See, e.g., Hawking and Ellis (1973); Wald (1984).
2
Hawking (1971, 1972, 1973).
229

230 Chapter 7 Locating black hole horizons
as long as all matter satisfies the null energy condition.
3
In the collision and coalescence
of two or more black holes, the surface area of the remnant black hole must be greater than
the sum of the progenitor black holes.
The fact that the event horizon area cannot decrease motivates the definition of the
irreducible mass
4
M
irr
≡
A
16π
1/2
. (7.2)
It is possible to extract energy and angular momentum from a rotating Kerr black hole.
While such an interaction can reduce the black hole’s mass, it cannot reduce its area,
according to the area theorem. The definition (7.2) then implies that the irreducible mass
of the black hole cannot decrease, which motivates its name.
Exercise 7.1 Verify that for a Schwarzschild black hole the irreducible mass M
irr
is equal to the ADM mass M
ADM
.
The area theorem can be used to place a strict upper limit on the amount of energy that
is emitted in gravitational radiation in black hole collisions.
Exercise 7.2 Consider two widely separated, nonrotating black holes of masses M
1
and M
2
, initially at rest with respect to some distant observer. Use the area theorem
to find an upper limit on the energy emitted in gravitational radiation that arises from
the head-on collision of the two black holes. Verify that for equal mass black holes
at most 29% of the total initial energy can be emitted in gravitational radiation.
In Chapter 13 we will find that considerably less energy is emitted in collisions of black
holes than the upper limit allowed by the area theorem.
Given the irreducible mass M
irr
and the angular momentum J of an isolated, stationary
black hole, we can compute the Kerr mass M (= M
ADM
) from
M
2
= M
2
irr
+
1
4
J
2
M
2
irr
. (7.3)
Solving for M
irr
we find
M
2
irr
=
M
2
2
1 +
)
1 −
J
2
M
4
, (7.4)
which implies that we have M
2
/M
2
irr
≤ 2 for Kerr black holes, with equality in the extreme
Kerr limit when J = M
2
.
While the event horizon has some very interesting geometric properties, its global nature
makes it very difficult to locate in a numerical simulation. The reason is that knowledge of
3
The null energy condition requires that T
ab
k
a
k
b
≥ 0 for all null vectors k
a
. For a perfect gas, this condition requires
ρ + P ≥ 0.
4
Christodoulou (1970); Christodoulou and Ruffini (1971); see also Chapter 1.2.