Baumgarte T., Shapiro S. Numerical Relativity. Solving Einstein’s Equations on the Computer
Подождите немного. Документ загружается.

7.1 Concepts 231
the entire future spacetime is required to decide whether or not any particular null geodesic
will ultimately escape to infinity. In numerical simulations an event horizon can be found
only “after the fact”, i.e., after the evolution has proceeded long enough to have settled
down to a stationary state.
Locating event horizons in “post-processing” may be sufficient for diagnostic purposes,
i.e., for analyzing the geometrical and physical consequences of a black hole simulation
after it is completed, but it does not allow us to locate the black holes during the course of a
numerical simulation. The later can be important, and is sometimes essential, for allowing
the simulation to continue in the presence of one or more black holes. The spacetime
singularities inside the black holes must be excluded from the numerical grid, since they
would otherwise spoil the numerical calculation. Several of the following chapters treat
simulations in which black holes are present and there we will discuss several different
strategies for avoiding black hole singularities numerically. One approach is based on the
realization that, by definition, the interior of a black hole is causally disconnected from, and
hence can never influence, the exterior. This fact suggests that we may “excise”, i.e., remove
from the computational domain, the spacetime region inside the event horizon.
5
Black hole
“excision” requires at least approximate knowledge of the location of the horizon at all times
during the evolution, so the construction of the event horizon after the fact is not sufficient.
The concept of apparent horizons allows us to locate black holes during the evolution.
The apparent horizon is defined as the outermost smooth 2-surface, embedded in the spatial
slices , whose outgoing future null geodesics have zero expansion everywhere. We will
explain this notion in much greater detail in Section 7.3 below. As we will see, the apparent
horizon can be located on each slice , when it exists, and is therefore a local (in time)
concept. The singularity theorems of general relativity
6
tell us that if an apparent horizon
exists on a given time slice, it must be inside a black hole event horizon.
7
This theorem
makes it safe to excise the interior of an apparent horizon from a numerical domain.
Note, however, that absence of proof is not proof of absence: the absence of an apparent
horizon does not necessarily imply that a black hole is absent. One example can be found
in the Oppenheimer–Snyder collapse of spherical dust to a black hole as constructed in
Chapter 1.4; we will return to this example in Section 7.3.1. It is also possible to construct
slicings of the Schwarzschild geometry in which no apparent horizon exists.
8
Also, it is
straightforward to show that apparent horizons do not form during spherical collapse in
polar slicing.
9
These examples demonstrate the gauge-dependent nature of the apparent horizon. Nev-
ertheless, the usual expectation when performing a black hole a simulation is that, except
5
Unruh (1984), as quoted in Thornburg (1987); see also Chapters 13.1.1 and 14.2.3.
6
See Hawking and Ellis (1973); Wald (1984) for an introduction.
7
This statement is not necessarily true in other theories of gravity. In Brans–Dicke theory, for example, apparent horizons
may exist outside of event horizons; see Scheel et al. (1995b) for a numerical example.
8
Wald and Iyer (1991)
9
See exercises 7.13 and 8.10.
232 Chapter 7 Locating black hole horizons
when choosing a special slicing in which an apparent horizon is known to be absent, an
apparent horizon will eventually appear on the slice whenever a black hole is present.
The fact that the apparent and event horizons always coincide in a stationary spacetime
promotes this expectation.
Now consider constructing the worldtube H formed by stacking together apparent
horizons on different spatial slices . In general, H can make discrete jumps and does
not need to be continuous (see Chapter 1.4 and Figure 1.3). When matter or radiation
falls into the black hole the horizon H expands. When the black hole is isolated, however,
and absorbs no more matter or radiation, H becomes a null-surface. In this regime H
can be described within the isolated horizon framework.
10
Using information on H , this
formalism provides a coordinate-independent definition of the black hole mass and angular
momentum, as we will discuss below.
7.2 Event horizons
Event horizons are spanned by outgoing light rays that neither reach future null infinity
nor hit the black hole singularity. As a nontrivial but analytical example, we located
the event horizon in the Oppenheimer–Snyder collapse of a dust sphere to a black hole
in Chapter 1.4. In principle, knowledge of the entire future evolution of a spacetime is
necessary to determine the fate of outgoing light rays and thereby locate event horizons. In
practice, however, event horizons can be identified fairly accurately after a finite evolution
time in a numerical simulation, provided the spacetime has settled down to a nearly
stationary state.
An obvious approach to locating an event horizon in this situation is to evolve null
geodesics,
11
whose worldlines are governed by the equation
d
2
x
a
dλ
2
+
(4)
a
bc
dx
b
dλ
dx
c
dλ
= 0, (7.5)
where λ is an affine parameter. Splitting this second-order equation into two first-order
equations and substituting 3 + 1 metric quantities yields
dp
i
dλ
=−α∂
i
α( p
0
)
2
+ ∂
i
β
k
p
k
p
0
−
1
2
∂
i
γ
lm
p
l
p
m
dx
i
dλ
= γ
ij
p
j
− β
i
p
0
,
(7.6)
wherewehaveused p
i
= dx
i
/dλ and p
0
= (γ
ij
p
i
p
j
)
1/2
/α (which enforces g
ab
p
a
p
b
=
0).
Exercise 7.3 Derive equations (7.6).
In a numerical spacetime, the lapse α, the shift β
i
and the spatial metric γ
ij
are known
on the computational grid, so that light rays can be ejected in different directions p
i
from
10
Ashtekar et al. (2000); Ashtekar and Krishnan (2004).
11
See, e.g., Hughes et al. (1994).
7.2 Event horizons 233
every point x
a
in spacetime and their geodesic trajectories tracked. The search for an event
horizon can be expedited by knowing the location of the apparent horizons. If all light rays
sent out from an event x
a
end up inside an apparent horizon (which is always located inside
an event horizon) the event must reside inside the event horizon as well. If, on the other
hand, at least one light ray sent out from the event escapes to large separations, it is not
inside an event horizon. By distinguishing events in this way, the ejection and propagation
of light rays from various points in spacetime can delineate the location of the event
horizon.
In practice it is more expeditious to integrate null geodesics backwards in time.
12
Future
directed light rays diverge away from the event horizon, either toward the interior of
the black hole or toward future null infinity. By contrast, backwards propagating rays
converge on the event horizon, which thus acts as an “attractor” for these rays. This
method is particularly efficient if one can identify a finite region in spacetime within
which the event horizon is expected to reside. It is then sufficient to integrate light rays
from events residing in this region at late times, and they will be attracted to the event
horizon.
This method becomes quite transparent in spherical symmetry, where we can often
find the trajectories of “outgoing” null geodesics analytically. The label “outgoing” is
somewhat misleading, since inside the event horizon all worldlines propagate to smaller
areal radius. For example, for a Schwarzschild black hole in Kerr–Schild coordinates, we
noted in exercise 6.3 that outgoing null geodesics must satisfy
t − r = 4M ln |r/2M − 1|+constant. (7.7)
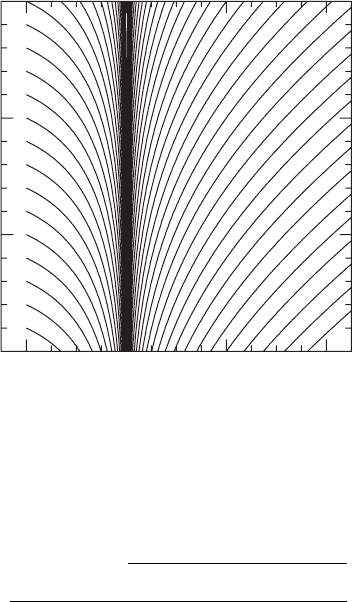
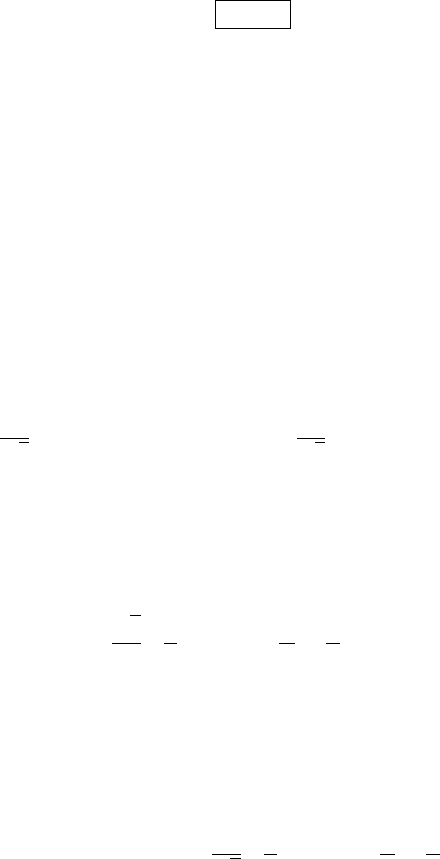
As shown in Figure 7.1, tracing these geodesics backwards in time inevitably brings us to
the event horizon at r = 2M.
In nontrivial applications, this technique has been used to probe the topology of the
event horizon arising during the head-on collision and merger of two black holes, as well
as the collapse of a rotating toroidal cluster to a toroidal black hole. The “pair of pants”
that the event horizon forms in a spacetime diagram for the collapse of two collisionless
clusters to two black holes, followed by their head-on collision, is depicted in Figure 10.5.
We postpone a discussion of these simulations until Chapter 10.2 and 10.4.
Instead of integrating individual null geodesics, we can also consider constructing a
2 + 1 dimensional null hypersurface enclosing a bundle of outgoing null geodesics in
spacetime.
13
We can define such a null hypersurface as a level surface of some function
f (t, x
i
), say f (t, x
i
) = 0. Given that the normal vector ∂
a
f to such a null hypersurface
must itself be null,
14
the function f must satisfy
g
ab
∂
a
f ∂
b
f = 0. (7.8)
12
See Hughes et al. (1994); Anninos et al. (1995); Libson et al. (1996).
13
See Anninos et al. (1995); Libson et al. (1996).
14
See, e.g., Wald (1984), p. 65.
234 Chapter 7 Locating black hole horizons
0
0
5
10
15
246
r/M
t/M
Figure 7.1 Worldlines of outgoing null geodesics in a Schwarzschild spacetime in Kerr–Schild coordinates (see
exercise 6.3). Traced backwards in time, these rays are strongly attracted to the event horizon at r/M = 2. These
worldlines coincide with contours of the function f introduced in equation (7.8).
Solving for ∂
t
f we then find an evolution equation for f ,
∂
t
f =
−g
ti
∂
i
f +
(g
ti
∂
i
f )
2
− g
tt
g
ij
∂
i
f ∂
j
f
g
tt
, (7.9)
where we have chosen the positive root so that the surface is generated by outgoing null
geodesics. Expressing the spacetime metric in terms of the lapse, shift and spatial metric
we find
∂
t
f = β
i
∂
i
f −
α
2
γ
ij
∂
i
f ∂
j
f
1/2
. (7.10)
Exercise 7.4 Derive equation (7.10) from (7.8).
It is particularly easy to use equation (7.10) to locate an event horizon if, at late time,
we can bracket it by two null hypersurfaces, e.g., S
1
and S
2
. Suppose each one of these two
hypersurfaces is defined by a certain value, say zero, of two functions f
1
and f
2
. Knowing
the location of the apparent horizon at late times again facilitates the choice of S
1
and S
2
.
We can use equation (7.10)toevolve f
1
and f
2
backwards in time, and find S
1
and S
2
at
earlier times by locating f
1
= 0and f
2
= 0. The two hypersurfaces will converge on the
event horizon.
In spherical symmetry it is easy to find the general solution for f , which illustrates why
this approach works. By construction, f is constant along outgoing light rays. In Kerr–
Schild coordinates, outgoing light rays travel along the characteristics (7.7). Any arbitrary
7.3 Apparent horizons 235
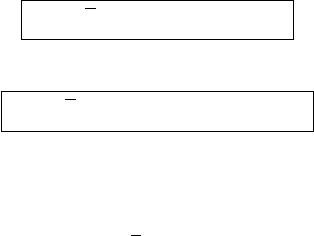
Figure 7.2 The “pair of pants” formed by the event horizon in a spacetime diagram depicting the head-on
collision of two “eternal” black holes. [From Matzner et al. (1995).]
function
f = f (t − r − 4M ln |r/2M − 1|) (7.11)
must therefore be a solution to equation (7.10).
Exercise 7.5 Verify that any function f = f (t −r − 4M ln |r/2M − 1|) is a solu-
tion to equation (7.10).
This technique has been used to construct the event horizon for yet another scenario
describing the head-on collision of two black holes. We will also discuss this scenario,
which involves “eternal” black holes, in Chapter 10.2, but here, in anticipation, we show a
spacetime diagram depicting the event horizon in Figure 7.2.
7.3 Apparent horizons
Consider a smooth, closed, 2-dimensional hypersurface S residing in . By construction, S
is spatial. Let s
a
be its outward pointing unit normal lying in . Evidently s
a
then satisfies
s
a
s
a
= 1ands
a
n
a
= 0. Just as the spacetime metric g
ab
induces the spatial metric γ
ab
on
236 Chapter 7 Locating black hole horizons
S
Σ
l
a
n
a
k
a
s
a
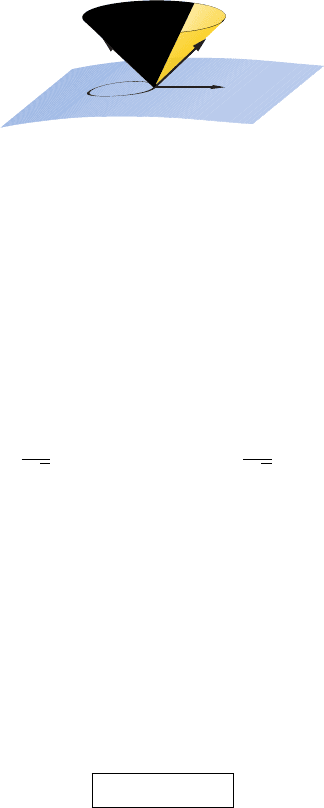
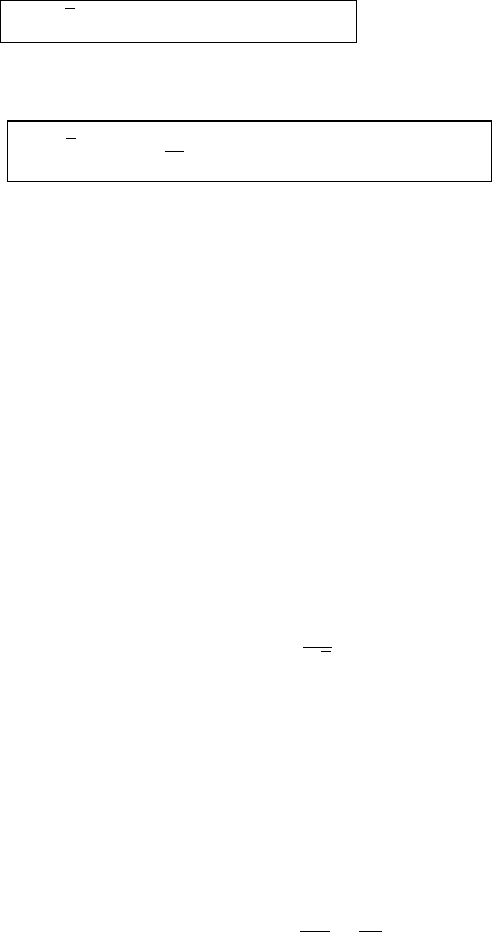
Figure 7.3 A smooth, 2-dimensional, hypersurface S is embedded in . The unit, outward-pointing normal to S
lying in is s
a
, and the normal to is n
a
. The outgoing and ingoing null tangent vectors k
a
and l
a
are
constructed as linear combinations of n
a
and s
a
.
(see Chapter 2.3), the metric γ
ab
induces a 2-dimensional metric m
ab
on S given by
m
ab
= γ
ab
− s
a
s
b
= g
ab
+ n
a
n
b
− s
a
s
b
. (7.12)
For each point on S we can now construct a pair of future-pointing null geodesics whose
projection on is orthogonal to S. Up to an overall factor, the tangents k
a
and l
a
to these
geodesics on S are
k
a
≡
1
√
2
(n
a
+ s
a
)andl
a
≡
1
√
2
(n
a
− s
a
) (7.13)
(see Figure 7.3). By construction we have k
a
k
a
= 0andm
ab
k
a
= 0aswellasl
a
l
a
= 0
and m
ab
l
a
= 0, and we have chosen the normalization so that k
a
l
a
=−1. We call k
a
the
tangent to the “outgoing” and l
a
the tangent to the “ingoing” null geodesic. These names
are again somewhat misleading, since inside a black hole both tangents point toward the
black hole’s interior. Combining equations (7.12) and (7.13) we can express m
ab
in terms
of k
a
and l
a
as
m
ab
= g
ab
+ k
a
l
b
+l
a
k
b
. (7.14)
The expansion of the outgoing null geodesics orthogonal to S is
= m
ab
∇
a
k
b
. (7.15)
Note that k
a
is only defined on S. The projection with m
ab
ensures that only derivatives
tangent to S enter this expression, so that no knowledge of k
a
away from S is required in
this definition of the expansion.
Exercise 7.6 Show that the definition (7.15) is equivalent to
=∇
a
k
a
(7.16)
if we assume that the null tangent vectors k
a
are affinely parametrized, i.e., k
a
∇
a
k
b
=
0, in a neighborhood of S.
We now define an outer-trapped surface as a 2-dimensional surface S embedded in
on which the expansion of the outgoing null geodesics orthogonal to S is negative
7.3 Apparent horizons 237
everywhere.
15
We further define a trapped region as any region of that contains outer-
trapped surfaces.
16
Finally, we define the apparent horizon as the outer boundary of any
connected trapped region. This definition makes the apparent horizon a marginally outer-
trapped surface on which the expansion of outgoing null geodesics vanishes
= 0. (7.17)
Before proceeding with the formal derivation it may be useful to illustrate the above
concepts with a simple example in spherical symmetry. Without loss of generality we can
write the spacetime line element in spherical polar coordinates in the form
ds
2
=−(α
2
− A
2
β
2
)dt
2
+ 2A
2
βdrdt + A
2
dr
2
+ B
2
r
2
(dθ
2
+ sin
2
θdφ
2
). (7.18)
The only nonvanishing component of the shift vector β
i
is the radial component, which
we call β, and we may further assume that α, β, A and B are functions of t and r only.
Consider a spherical surface S centered on the origin. The spatial normal vector s
i
to S
must then be radial and take the form
s
a
= (0, A
−1
, 0, 0) (7.19)
and hence s
a
= (Aβ, A, 0, 0). We can now construct the outgoing null normal
k
a
=
1
√
2
(Aβ − α, A, 0, 0) and k
a
=
1
√
2
(α
−1
, A
−1
− α
−1
β, 0, 0), (7.20)
as well as the induced metric on S
m
ab
= diag(0, 0, B
2
r
2
, B
2
r
2
sin
2
θ). (7.21)
Computing the expansion we find
=
√
2
rB
1
α
∂
t
(Br) +
1
A
−
β
α
∂
r
(Br)
. (7.22)
Exercise 7.7 Derive equation (7.22).
So far this result is not too enlightening. It turns out, however, that the expression in
parentheses is proportional to the rate of change of the areal radius along k
a
. The areal
radius is R
area
= Br, and its directional derivative along k
a
is therefore
k
a
∇
a
R
area
= k
t
∂
t
(Br) + k
r
∂
r
(Br) =
1
√
2
1
α
∂
t
(Br) +
1
A
−
β
α
∂
r
(Br)
. (7.23)
15
E.g. Hawking and Ellis (1973); Wald (1984).
16
Some authors define a trapped region in terms of trapped surfaces as opposed to outer-trapped surfaces. For trapped
surfaces the expansion of the ingoing null geodesics orthogonal to S is required to be negative,
(l)
< 0, in addition
to <0. For the purposes of this section this distinction is unimportant.

238 Chapter 7 Locating black hole horizons
Combining equations (7.22) and (7.23)wehave
=
2
R
area
k
a
∇
a
R
area
=
1
4π R
2
area
k
a
∇
a
(4π R
2
area
). (7.24)
Equation 7.24 shows that the expansion measures the fractional change of the cross-
sectional area of a bundle of outgoing null rays with tangent vectors k
a
, or, equivalently,
the fractional change in the area of an outward spherical flash of light.
17
Exercise 7.8 Show that
=
1
m
1/2
L
k
m
1/2
= L
k
ln m
1/2
, (7.25)
where m is the determinant of the induced metric m
ab
.Sincem
1/2
d
2
x is the proper
area element of a cross-section of a bundle of null rays k
a
, it can then be shown that
measures its fractional change of cross-sectional area in general, and not only in
spherical symmetry.
With this result the definition of an apparent horizon becomes very simple to apply in
spherical symmetry. The area
A of a spherical flash of light rays emitted radially outward
will propagate instantly to a larger area if it is emitted outside an apparent horizon, to a
smaller area if emitted inside an apparent horizon, and remain constant if emitted on the
apparent horizon.
Consider, for example, a Schwarzschild black hole in isotropic coordinates (see, e.g.,
Table 2.1), for which A = B = ψ
2
= (1 + M/(2r))
2
, β = 0, and ∂
t
(Br) = 0. According
to equation (7.22) the expansion then vanishes when ∂
r
(Br) = 0, which occurs at
r =
M
2
. (7.26)
In exercise 3.4 we have seen that this isotropic radius corresponds to an areal radius of
R
areal
= 2M. Not surprisingly, the apparent horizon coincides with the event horizon in
this static spacetime.
Exercise 7.9 Verify that for a Schwarzschild black hole in Schwarzschild, Kerr–
Schild and Painlev
´
e–Gullstrand coordinates the apparent horizon is located at
R
areal
= 2M.
Returning to our general derivation, we would like to bring the expansion (7.15)intoa
form that is more suitable for evaluation in a 3 + 1 numerical simulation and write it in
terms of 3-dimensional spatial objects. Substituting equation (7.13)into(7.15)wehave
√
2 m
ab
∇
a
k
b
= m
ab
∇
a
(n
b
+ s
b
) = m
ij
(D
i
s
j
− K
ij
) (7.27)
or, using equation (7.12)inm
ij
K
ij
, we obtain
√
2 m
ab
∇
a
k
b
= D
i
s
i
− K + s
i
s
j
K
ij
. (7.28)
17
See also the discussion in Poisson (2004), Section 2.4.
7.3 Apparent horizons 239
Here we also have used the relation s
a
s
a
= 1 as well as the definition (2.49) of the extrinsic
curvature. The apparent horizon condition is therefore
0 =
√
2 = m
ij
(D
i
s
j
− K
ij
) (7.29)
or equivalently
0 =
√
2 = D
i
s
i
− K + s
i
s
j
K
ij
. (7.30)
Exercise 7.10 Show that with the conformal rescalings (3.5), (3.35)ands
i
= ψ
−2
¯
s
i
the apparent horizon condition (7.30) can be written as
¯
D
i
¯
s
i
+ 4
¯
s
i
¯
D
i
ln ψ −
2
3
ψ
2
K + ψ
−4
¯
A
ij
¯
s
i
¯
s
j
= 0. (7.31)
It is often useful in the search for apparent horizons to characterize the horizon as a level
surface of a scalar function, e.g.,
τ (x
i
) = 0. (7.32)
We can then write the unit normal s
i
as
s
i
= λD
i
τ, or s
i
= λD
i
τ = λ∂
i
τ, (7.33)
where λ is the normalization factor
λ ≡
γ
ij
D
i
τ D
j
τ
−1/2
. (7.34)
In the expression
m
ij
D
i
(λD
j
τ ) = m
ij
λD
i
D
j
τ + m
ij
(D
i
λ)(D
j
τ ) (7.35)
the second term vanishes, since D
j
τ is proportional to s
j
, which vanishes when contracted
with m
ij
. Substituting equation (7.33)into(7.29) therefore yields
0 = m
ij
(λD
i
D
j
τ − K
ij
) = m
ij
(λ∂
i
∂
j
τ − s
k
k
ij
− K
ij
). (7.36)
A particularly useful form of the level function τ is
τ (x
i
) = r
C
(x
i
) − h(θ,φ), (7.37)
where r
C
is the coordinate separation between the point x
i
and some fiducial point C
i
inside the τ = 0 surface, and where θ and φ are spherical polar coordinates centered on
C
i
. In the following we will assume that C
i
is the origin of the coordinate system, so
that C
i
= 0, but the generalization to a point that does not coincide with the origin is
straightforward. The function h then measures the coordinate distance from the origin to
the τ = 0 surface in the (θ,φ) direction.
The first derivative of equation (7.37)is
∂
i
τ = σ
i
− ∂
i
h, (7.38)
240 Chapter 7 Locating black hole horizons
where σ
i
≡ ∂
i
r
C
is the unit vector in the (θ,φ) direction. In spherical polar coordinates r
C
is simply r , so that σ
i
= (1, 0, 0). Since ∂
i
σ
j
= 0, the apparent horizon condition (7.36)
reduces to
0 =
√
2 = m
ij
(λ∂
i
∂
j
h − s
k
k
ij
− K
ij
) (spherical polar coordinates). (7.39)
Exercise 7.11 Show that in Cartesian coordinates the apparent horizon condition
(7.36) becomes
0 =
√
2 = m
ij
λ
r
C
(δ
ij
− σ
i
σ
j
) + λ∂
i
∂
j
h − s
k
k
ij
− K
ij
(Cartesian coordinates).
(7.40)
We have now expressed the apparent horizon condition as a second-order partial differ-
ential equation for the function h that measures the horizon’s coordinate distance from the
origin. The principal part of the equation, m
ij
∂
i
∂
j
h, involves a Laplacian with respect to
the 2-dimensional metric m
ij
on the surface S. Finding solutions to these elliptic equations,
and hence locating apparent horizons, is in general not at all a trivial matter, in particular
since the normal vector s
i
also contains derivatives of h. For the remainder of this section
we will discuss strategies for locating apparent horizons on spatial hypersurfaces exhibiting
spherical symmetry, axisymmetry, and without any special symmetry.
7.3.1 Spherical symmetry
In spherical symmetry h is a constant and does not depend on θ or φ. The second deriva-
tives in the differential equation (7.39) therefore vanish, and s
i
= λσ
i
can be constructed
algebraically from the metric. The expansion then reduces to the algebraic expression
=−
1
√
2
m
ij
(s
k
k
ij
+ K
ij
) (7.41)
which only depends on radius r. Finding an apparent horizon simply amounts to finding a
root of this function. This simplification does not come as a surprise, of course, since we
have seen before that apparent horizons can be located quite easily in spherical symmetry.
Exercise 7.12 Verify that for a metric of the form (7.18) the expansion (7.41) yields
(7.22).
Exercise 7.13 (a) Show that in spherical symmetry and isotropic coordinates
(i.e., A = B in the metric 7.18) the apparent horizon condition reduces to
1 + r
∂
r
A
A
−
Ar
2
K
T
= 0, (7.42)
where K
T
is defined by equation (4.63).
(b) Use equation (7.42) to argue that apparent horizons do not form in polar slicing,
provided dr
s
/dr = 0, where r is the isotropic radius and r
s
is the areal radius.