Бороденко В.А. Исследование систем управления в среде MATLAB
Подождите немного. Документ загружается.

191
6
--------------------
s^3 + 5 s^2 + 10 s + 9
Коэффициенты из символьных констант преобразуются в чи-
словые, что позволяет далее выполнять над объектом различные опе-
рации. Структурная формула может быть выражена в общем виде, ко-
гда по крайней мере один параметр остается неизвестной переменной,
и в числовом виде, когда значения всех параметров известны.
Затруднения возникают при попытке описать систему с пере-
крещивающимися связями, когда недостаточно использовать только
три основных правила структурных преобразований. В этом случае
следует либо самостоятельно получить общую структурную формулу,
пользуясь правилом переноса воздействий или правилом Мейсона,
либо воспользоваться методом решения узловых уравнений.
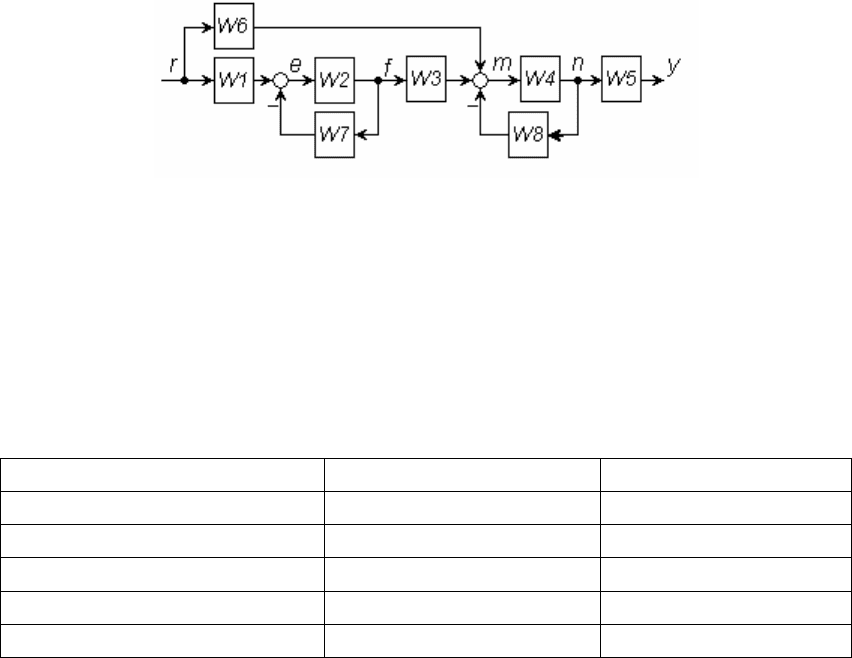
Метод узловых уравнений исследуем на примере системы (ри-
сунок 3.10).
Рисунок 3.10
Составляем уравнения для сигналов в точках e, f, m, n, y (на вы-
ходах блоков или сумматоров, за исключением известных сигналов, т.
е. воздействий на входах системы), уравнения в форме 1 разрешены
относительно нуля, уравнения в форме 2 разрешены относительно
входных воздействий (таблица 8).
Таблица 8
Исходные уравнения Форма 1 Форма 2
e=-W
7
f+W
1
r e+W
7
f-W
1
r=0 e+W
7
f=W
1
r
f=W
2
e f-W
2
e=0 f-W
2
e=0
m=W
3
f-W
8
n+W
6
r m-W
3
f+W
8
n-W
6
r=0 m-W
3
f+W
8
n=W
6
r
n=W
4
m n-W
4
m=0 n-W
4
m=0
y=W
5
n y-W
5
n=0 y-W
5
n=0
>> syms e f m n y r w1 w2 w3 w4 w5 w6 w7 w8
>> eq1=e+w7*f-w1*r; eq2=f-w2*e; eq3=m-w3*f+w8*n-w6*r;
>> eq4=n-w4*m; eq5=y-w5*n;
>> s=solve(eq1,eq2,eq3,eq4,eq5,e,f,m,n,y);
192
>> s.y
ans =
w5*w4*r*(w6+w2*w7*w6+w2*w3*w1)/(1+w4*w8+w2*w7+w2*w7*w4*w8)
Результатом является сигнал, т. е. реакция системы по выбран-
ному выходу относительно входа r. По умолчанию подразумевается,
что правая часть уравнений равна нулю (уравнения в форме 1), при
этом символ «равно» и ноль по правилам MATLAB не пишутся.
Можно выбрать в качестве выходного другой сигнал и, соответ-
ственно, получить реакцию (произведение входного сигнала на пере-
даточную функцию) для данного выхода. Реакции на выходах n и f
>> s.n
ans =
w4*r*(w6+w2*w7*w6+w2*w3*w1)/(1+w4*w8+w2*w7+w2*w7*w4*w8)
>> s.f
ans =
w2/(1+w2*w7)*w1*r
Решение системы линейных уравнений для определения переда-
точной функции может быть выполнено и методом Крамера. Знамена-
телем передаточной функции является характеристический полином,
т. е. главный определитель матрицы А, включающей коэффициенты
левой части уравнений в форме 2. Числитель передаточной функции
вычисляется посредством определителя, получаемого из общего опре-
делителя системы заменой столбца переменной, считающейся выхо-
дом системы, на входной вектор-столбец матричного уравнения b, об-
разованный коэффициентами при входных воздействиях – правой
части уравнений в форме 2.
>> syms w1 w2 w3 w4 w5 w6 w7 w8
>> A=[1 w7 0 0 0;-w2 1 0 0 0;0 -w3 1 w8 0;0 0 -w4 1 0;0 0 0 -w5 1]
A =
[ 1, w7, 0, 0, 0]
[ -w2, 1, 0, 0, 0]
[ 0, -w3, 1, w8, 0]
[ 0, 0, -w4, 1, 0]
[ 0, 0, 0, -w5, 1]
>> b=[w1;0;w6;0;0]
b =
w1
0
w6
0
0
>> den=det(A)
den =
193
1+w4*w8+w2*w7+w2*w7*w4*w8
>> AA=[A(:,1:4) b] % заменяем пятый столбец матрицы А вектором b
AA =
[ 1, w7, 0, 0, w1]
[ -w2, 1, 0, 0, 0]
[ 0, -w3, 1, w8, w6]
[ 0, 0, -w4, 1, 0]
[ 0, 0, 0, -w5, 0]
>> num=det(AA)
num =
w4*w6*w5+w2*w7*w4*w6*w5+w2*w3*w4*w1*w5
>> sys=simplify(num/den)
sys =
w4*w5*(w6+w2*w7*w6+w2*w3*w1)/(1+w4*w8+w2*w7+w2*w7*w4*w8)
Решая систему линейных уравнений другим методом, получаем
сразу матрицу передаточных функций для всех выходов e, f, m, n, y
соответственно (матрица А и вектор b описаны выше)
>> sys=inv(A)*b
sys =
1/(1+w2*w7)*w1
w2/(1+w2*w7)*w1
w3*w2/(1+w4*w8+w2*w7+w2*w7*w4*w8)*w1+1/(1+w4*w8)*w6
w4*w2*w3/(1+w4*w8+w2*w7+w2*w7*w4*w8)*w1+w4/(1+w4*w8)*w6
w5*w2*w4*w3/(1+w4*w8+w2*w7+w2*w7*w4*w8)*w1+w4*w5/(1+w4*w8)*w6
В последней строке матрицы sys получили уже известную пере-
даточную функцию для выхода y относительно входа r. В зависимости
от способа решения системы линейных уравнений результат может
отличаться по форме (но не по сути), например, для той же системы
>> sys=A\b
sys =
1/(1+w2*w7)*w1
w2/(1+w2*w7)*w1
(w6+w2*w7*w6+w2*w3*w1)/(1+w4*w8+w2*w7+w2*w7*w4*w8)
w4*(w6+w2*w7*w6+w2*w3*w1)/(1+w4*w8+w2*w7+w2*w7*w4*w8)
w4*w5*(w6+w2*w7*w6+w2*w3*w1)/(1+w4*w8+w2*w7+w2*w7*w4*w8)
Для системы второго порядка (рисунок 3.11) уравнения форми-
рования сигналов имеют вид a= -c+W
1
e; b= -d+W
2
a; c=W
3
b; d=W
4
c.
Перенося все слагаемые в левую сторону и отбрасывая согласно пра-
вилам MATLAB нуль, решаем уравнения и получаем аналитическое
представление сигналов в точках a, b, c и d.
>> syms e a b c d w1 w2 w3 w4
>> eq1=a+c-w1*e; eq2=b+d-w2*a; eq3=c-w3*b; eq4=d-w4*c;
>> sys=solve(eq1,eq2,eq3,eq4,a,b,c,d);

194
>> ya=sys.a
ya =
(1+w4*w3)*w1*e/(1+w4*w3+w3*w2)
Рисунок 3.11
или, если сразу заданы выходные аргументы в левой части выражения
>> syms e a b c d w1 w2 w3 w4
>> eq1=a+c-w1*e; eq2=b+d-w2*a; eq3=c-w3*b; eq4=d-w4*c;
>> [ya,yb,yc,yd]=solve(eq1,eq2,eq3,eq4,a,b,c,d)
ya =
(1+w4*w3)*w1*e/(1+w4*w3+w3*w2)
yb =
w2*w1*e/(1+w4*w3+w3*w2)
yc =
w3*w2*w1*e/(1+w4*w3+w3*w2)
yd =
w4*w3*w2*w1*e/(1+w4*w3+w3*w2)
Найдем решение, сформировав матрицу А коэффициентов при
переменных a, b, c, d и вектор-столбец коэффициентов при e.
>> A=[1 0 1 0;-w2 1 0 1;0 -w3 1 0;0 0 -w4 1];
>> b=[-w1;0;0;0]; sys=A\b
sys =
w1*(1+w4*w3)/(1+w4*w3+w3*w2)
1/(1+w4*w3+w3*w2)*w2*w1
w3/(1+w4*w3+w3*w2)*w2*w1
w4*w3/(1+w4*w3+w3*w2)*w2*w1
Подставив значения передаточных функций, а затем значения
параметров, получим в конечном итоге численное выражение переда-
точной функции
>> syms s k1 k2 T1 T2
>> w1=k1; w2=k2; w3=1/(T1*s+1); w4=1/(T2*s+1);
>> Wbe=subs(sys(2)) % подставляем обозначения коэффициентов
Wbe =
1/(1+1/(T2*s+1)/(T1*s+1)+1/(T1*s+1)*k2)*k2*k1
>> k1=1; k2=0.1; T1=0.2; T2=2;
>> Wben=subs(Wbe) % подставляем числовые значения коэффициентов
Wben =
1/10*(2*s+1)*(1/5*s+1)/(2/5*s^2+12/5*s+21/10)
>> [num,den]=numden(Wben);
195
>> num=sym2poly(num); % преобразуем символьную запись в числовую
>> den=sym2poly(den);
>> Wben=tf(num,den) % формируем стандартную TF-модель
Transfer function:
2 s^2 + 11 s + 5
--------------------
20 s^2 + 120 s + 105
Если значения передаточных функций или их параметров были
уже известны к моменту команды на решение уравнений, они под-
ставляются автоматически и необходимость в специальном примене-
нии функции подстановки subs() отпадает.
Все рассмотренные положения можно применить к описанию
структурной схемы в виде ориентированного графа, произведя заме-
ны: входной сигнал – входной узел, выходной сигнал – выходной
узел, блок – ветвь, сигнал – узел.
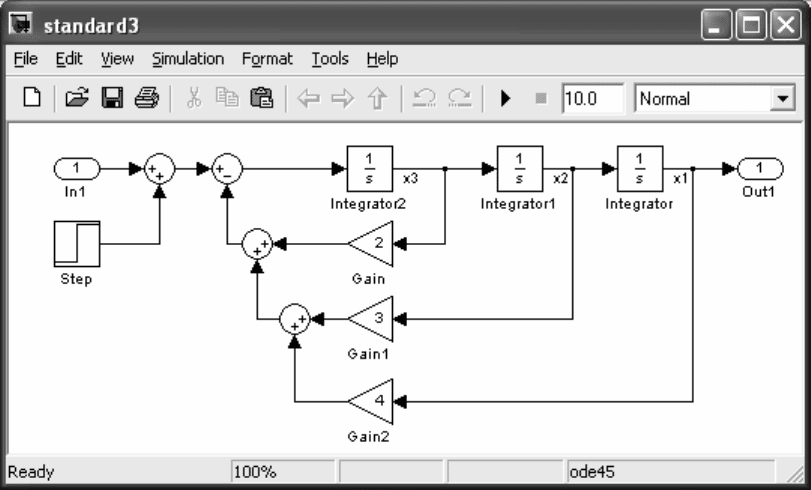
3.6 Визуальное моделирование
Рассмотрим другой путь и предоставим вычислить ПФ компью-
теру – обратимся к системе Simulink. В среде Simulink структурная
схема системы регулирования составляется с помощью готовых ус-
ловных графических обозначений (УГО) из библиотеки программы.
Для этого нужно открыть рабочее поле опцией File-New-Model и ка-
талог библиотеки командой или кнопкой Simulink (в командном окне)
и Library Browser (в окне конструирования модели).
Достаточно перетащить мышью нужное количество блоков Пе-
редаточная функция (Transfer Fcn – раздел Continuous), Усилитель
Gain, Интегратор Integrator и Сумматор Sum (раздел Commonly Used
Blocks) из окна элементов в окно конструирования и составить струк-
турную схему системы, соединяя их входы и выходы (рисунок 3.12).
Открывая двойным щелчком левой кнопки или правой кнопкой
мыши свойства элемента (Block parameters), задают численные вели-
чины или имена переменных (например, полиномов num и den), кото-
рым они присвоены, имя переменной State Name на выходе блока, ес-
ли необходимо, точность вычислений выходного сигнала Absolute to-
lerance. Коэффициенты полиномов записывают в виде векторов в
квадратных скобках, последовательно, начиная с коэффициента при
старшей степени s, разделяя пробелами или запятыми (саму перемен-
ную s не пишут). Единственное значение можно в скобки не брать.
Неповторяющееся имя переменной состояния должно быть записано в
апострофах – если является новым, и без апострофов – если заимство-
196
вано из Workspace. Для нескольких выходов в порядке перечисления
сверху вниз имена разделяются запятыми, например, ('x1', 'u', 'y' ),
число имен не должно превышать количество выходов.
Рисунок 3.12
Блок Transfer Fcn отображает SISO или SIMO (один вход – мно-
го выходов) объект, в последнем случае числитель будет не вектором,
а матрицей, при этом степень полиномов числителя не должна пре-
вышать степень полинома знаменателя, который будет одинаковым
для всех включенных функций. Отдельные коэффициенты или числи-
тель (знаменатель) в целом могут задаваться именем переменной, на-
пример num и den, чему внутри блока на модельном поле будет соот-
ветствовать надпись num(s)/den(s), или [1 k 3]. Такие переменные
должны быть определены в Workspace до начала моделирования, эти
положения применяются и для других блоков.
В блоке Zero-Pole задается вектор или матрица чисел – для ну-
лей, вектор – для полюсов и коэффициентов усиления, количество
выходов равно числу колонок в матрице нулей (по умолчанию один).
Для интегратора можно также задать источник (внутренний Internal
или внешний External) и величину начальных условий Initial
Condition, верхнюю и нижнюю границу насыщения Upper/Lower satu-
ration limit, сброс по сигналу извне External reset. Внешние связи вы-
зывают появление дополнительных входов.
В блоке State-Space задаются матрицы A, B, C, D (по умолчанию
все равны 1) и вектор начальных значений переменных состояния.
197
Число элементов вектора входа определяется количеством столбцов
матриц B, D, ширина вектора выхода (число выходных переменных
состояния) – количеством строк матриц C, D. Не допускаются началь-
ные значения переменных Initial Conditions x0 типа Inf или NaN или
задание числа значений, не соответствующего количеству перемен-
ных состояния (размеру матрицы A).
Библиотека элементов Control System Toolbox включает универ-
сальный блок LTI System, в котором может быть задана TF, ZPK и SS
модель – по умолчанию объект с передаточной функцией tf(1,[1 1]).
Для SS объекта могут быть определены начальные условия Initial
States в виде вектора x0.
Блок Transport Delay нуждается в задании неотрицательного
значения задержки Time delay в секундах (по умолчанию 1). Началь-
ное значение выхода (начальные условия) может быть задано в графе
Initial output, по умолчанию это значение равно нулю, оно не может
быть Inf или NaN. Если предполагается линеаризировать S-модель,
получить для нее описание в виде SS или TF объекта, следует задать
положительный целый порядок аппроксимации Паде Pade order (по
умолчанию 0). В среде Simulink это число не используется. Также для
последующей линеаризации может быть включена опция Direct
feedthrought of input during linearization, позволяющая исключить зве-
но из схемы (закоротить вход и выход) при вычислении линеаризиро-
ванной модели.
В MATLAB основной моделью является пространство состоя-
ний, а в нем не могут быть заданы отдельно дифференцирующие и
любые иные звенья с m > n, поэтому их желательно предварительно
совместить с соседними звеньями, у которых m < n, либо преобразо-
вать в реальные дифференцирующие звенья. Блок Derivative вычисля-
ет производную входного сигнала по времени du/dt и воспроизводит
реальное дифференцирующее звено (фильтр) с ПФ s/(Ns+1). Настраи-
ваемая постоянная времени N по умолчанию равна Inf.
Готовую схему можно испытать, подключив на ее входы источ-
ники сигналов (Sources), на выходы – отображающие средства (Sinks),
задав период моделирования в окне Simulation stop time и нажав кноп-
ку Start simulation, введя в командной строке sim имя_модели, либо
sim('model') или t=sim('model',tk), где tk – период моделирования.
Модель можно сохранить в виде файла с расширением .mdl (по
умолчанию – в рабочую папку) и вызвать командой open имя_модели.
При исследовании автономной системы, т. е. свободного движе-
ния, внешние источники не обязательны, достаточно задать началь-
ные условия в стандартных блоках State-Space, интеграторах или
198
звеньях чистого запаздывания, блоке LTI System. В библиотеку Simu-
link Extras-Additional Linear включены специальные блоки с заданием
начальных условий на входах и выходах – в пространстве состояний
State-Space with initial outputs, с передаточной функцией Transfer Fcn
with initial outputs, с нулями-полюсами Zero-Pole with initial outputs, а
также с заданием начальных значений переменных состояний – с пе-
редаточной функцией Transfer Fcn with initial states, с нулями-полю-
сами Zero-Pole with initial states.
Подключив к входам и выходам системы блоки вход (In1) и вы-
ход (Out1) из библиотеки элементов Commonly Used Blocks и вызвав
через меню Tools-Control Design-Linear Analysis (Инструменты-Проек-
тирование систем управления-Линейный анализ) окно Control and
Estimation Tools Manager, командой Linearize Model (Линеаризовать
модель) можно передать численные параметры математической моде-
ли системы графическому анализатору. В его окне LTI Viewer:
Linearization Quick Plot будут построены переходные характеристики
– по умолчанию, иные характеристики – по выбору пользователя.
Чтобы передать параметры такой модели в базу данных (рабо-
чее пространство – WorkSpace) программы MATLAB следует, вызвав
посредством меню File-Export диалоговое окно LTI Viewer Export, по-
сле двойного щелчка мышью задать имя своей модели в графе Export
As, а затем командой Export to Workspace передать данные и закрыть
три последних окна, не сохраняя проект.
Кроме того, если к системе подключены блоки вход (In) и выход
(Out), параметры системы в виде матриц A, B, C, D можно определить
с помощью обращения [a, b, c, d] = linmod('имя_модели'), после чего
создать описание в пространстве состояний функцией ss(a, b, c, d).
>> [a,b,c,d]=linmod('standard3')
a =
0 0 1
-4 -2 -3
0 1 0
b =
0
1
0
c =
1 0 0
d =
0
Обращение [num, den] = linmod('имя_модели') позволяет полу-
чить векторы коэффициентов числителей и знаменателей передаточ-
199
ных функций линеаризированной TF модели системы. Командой
S=linmod('имя_модели') выводится структура линеаризированной мо-
дели, отдельные свойства которой можно просмотреть или изменить.
>> S=linmod('standard3')
S = % структурное описание линеаризированной модели
a: [3x3 double]
b: [3x1 double]
c: [1 0 0]
d: 0
StateName: {3x1 cell}
OutputName: {'standard3/Out1'}
InputName: {'standard3/In1'}
OperPoint: [1x1 struct]
Ts: 0
>> S.StateName % имена переменных состояния и их порядок
ans =
'standard3/Integrator'
'standard3/Integrator2'
'standard3/Integrator1'
Функции linmod2() и linmodv5() выполняют те же операции, ис-
пользуя усовершенствованные алгоритмы вычислений, однако строят
только SS модель. Наконец, при подключенных входе (In) и выходе
(Out) функция sys=linearize('имя_модели') возвращает SS модель в ви-
де одного объекта с указанием составляющих блоков.
>> sys=linearize('standard3')
a =
Integrator Integrator2 Integrator1
Integrator 0 0 1
Integrator2 -4 -2 -3
Integrator1 0 1 0
b =
In1
Integrator 0
Integrator2 1
Integrator1 0
c =
Integrator Integrator2 Integrator1
Out1 1 0 0
d =
In1
Out1 0
Continuous-time model.
200
Заметим, что в версии 7.01 MATLAB на назначение номеров уз-
лов (индексов переменных состояния) влияет очередность выклады-
вания блоков с s в знаменателе на рабочее поле – только за счет этого
получается разный вид описаний системы в пространстве состояний.
Функция [X,U,Y,DX]=trim('модель') находит параметры равно-
весия S-модели, при которых производные DX ее переменных состоя-
ния стремятся к нулю, возвращая подобранные значения переменных
состояния Х, входов U, выходов Y. Поиск начинается от начальных
значений х0 = 0, если точка равновесия таким образом не отыскивает-
ся, начальный вектор х0 подбирается. Могут быть заданы начальные
значения x0, u0, y0, от которых должен начаться поиск. Значения х0,
найденные программой в процессе поиска, можно получить командой
[sizes,x0,xstr] = имя_модели([],[],[],0).
>> [X,U,Y,DX]=trim('standard3')
X =
0.2000
-0.0000
-0.0000
U =
-0.2000
Y =
0.2000
DX =
1.0e-015 *
-0.0000
0.1110
-0.0000
>> [sizes,x0,xstr] = standard3([],[],[],0)
Simulink снабжен специальными блоками, предназначенными
для адекватной линеаризации систем. В библиотеке Simulink Extras-
Linearization имеется блок производной с переключением Switched
Derivative, который, помимо постоянной N из передаточной функции
Ns/(Ns+1), имеет настраиваемый переключатель Switch value, уста-
навливаемый в состояние 1 для линеаризации и 0 при симуляции. Там
же находится блок задержки Switched Transport Delay, в котором по
умолчанию задан Pade order, равный 2, и включено закорачивание
звена Direct feedthrough при линеаризации. Отмечают, что включение
этой опции в звеньях чистой задержки может изменить индексацию
переменных состояния при использовании linmod или trim. Применив
команды компиляции для структурной модели, например, с именем
«sdelay», получим список переменных состояния в массиве x_str.
>> [sizes, x0, x_str]=sdelay([],[],[],'lincompile')