Бороденко В.А. Исследование систем управления в среде MATLAB
Подождите немного. Документ загружается.

261
го корня отрицательно. Показатели качества для таких корней не
имеют смысла и их не стоит принимать во внимание.
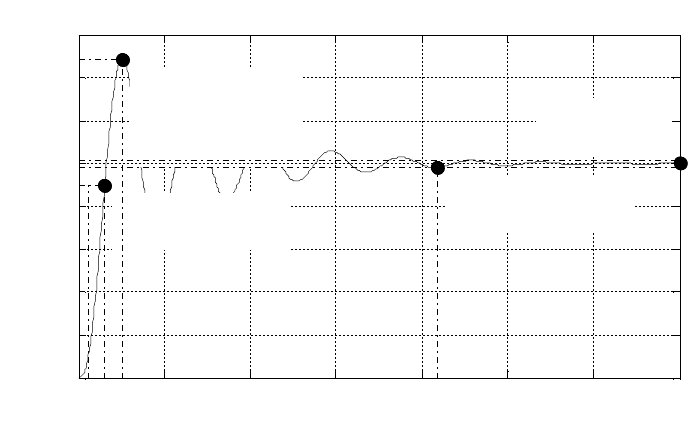
Построив с помощью функции step() или графического анализа-
тора ltiview(имя_системы) переходную характеристику для заданных
входа-выхода (рисунок 4.35), на вкладке Characteristics (Характери-
стики) контекстного меню можно задать показ прямых показателей
качества: максимума (Peak Response), времени регулирования (Settling
Time), времени нарастания (Rise Time) и установившегося значения
DC Gain (Steady State или Final Value).
>> sys=tf(1,[1 2 3 4]); step(sys)
Step Response
Time (sec)
Amplitude
0 5 10 15 20 25 30 35
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
System: sys
Peak amplitude: 0.372
Overshoot (%): 48.6
At time (sec): 2.57
System: sys
Rise Time (sec): 0.955
System: sys
Settling Time (sec): 20.9
System: sys
Final Value: 0.25
Рисунок 4.35
При работе с графиком step в окне редактирования свойств
Properties на вкладке Options необходимо обязательно проверить дей-
ствительные значения зоны Δ для оценки времени регулирования и
интервала оценки времени нарастания, особенно, если вы работаете с
компьютером общего пользования. Значения показателей качества
определяются по табличке, формируемой при установке указателя
мыши на маркеры графика, при щелчке мышью табличка сохраняется.
Из графика время нарастания по диапазону (0,1-0,9) установившегося
значения 0.955 с, время регулирования при ошибке 2 % равно 20.9 с,
значение максимума 0.372 при времени достижения максимума 2.57 с,
перерегулирование (Overshoot) 48.6 %, установившееся значение 0.25,
установившаяся ошибка ε(∞) = 1 – 0.25 = 0.75.
По типовому графику переходного процесса в MATLAB (рису-
нок 4.36) видно, что программа различает заброс от установившегося
значения вверх (Overshoot) и провал от начального (Init) значения
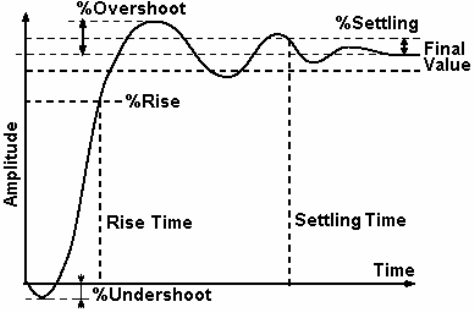
262
вниз (Undershoot). Последнее понятие отсутствует в учебной литера-
туре СНГ и не отображается в численных характеристиках на графике
Step самой MATLAB, однако используется при расчете регуляторов.
Рисунок 4.36
Функция S=lsiminfo(y,t,yfinal) для сформированных любым спо-
собом массивов характеристики y, отсчетов времени t и расчетного ус-
тановившегося значения yfinal выводит следующие показатели, объе-
диненные в структуру.
>> [y,t]=impulse(sys);
>> St=lsiminfo(y,t,0) % установившееся значение 0
St =
SettlingTime: 22.2467
Min: -0.1624 % минимальное значение y(t)
MinTime: 3.4959
Max: 0.2531 % максимальное значение y(t)
MaxTime: 1.3984
Командой lsiminfo(y, t, yfinal, 'SettlingTimeThreshold', %Settling)
можно задать одновременно зону Δ %Settling в относительных едини-
цах вместо установленной по умолчанию 0.02. Из структуры можно
извлечь и использовать отдельные элементы
>> St.SettlingTime
ans =
22.2467
Функция stepinfo(sys) позволяет извлечь в виде структуры чис-
ленные значения почти всех показателей качества без вывода графика
(отсутствует только установившееся значение Final Value). Функция
также имеет форму stepinfo(y,t,yfinal), т. е. может использовать любую
временную характеристику, а если yfinal не задано, вместо него она
использует значение на последнем отсчете. Параметры SettlingMin и
263
SettlingMax характеризуют наименьшее и наибольшее отклонения
кривой в динамике от установившегося значения с момента первого
пересечения кривой с линией установившегося значения.
>> stepinfo(sys)
ans =
RiseTime: 0.9550
SettlingTime: 20.9405
SettlingMin: 0.1633
SettlingMax: 0.3716
Overshoot: 48.6365
Undershoot: 0
Peak: 0.3716
PeakTime: 2.5743
Заметим, что наблюдаются случаи расхождения параметров Set-
tlingMin, SettlingMax с графиком, связанного, очевидно, с интерполя-
цией, что, хотя они и не являются основополагающими для оценки
качества, все же ставит под сомнение правильность определения ос-
тальных показателей. Например, для модели с ПФ w=tf([1 2 1],[1 2 4])
было выведено SettlingMax: 0.3716 вместо 0.27, и SettlingMin: 0.1633
вместо 0.128 по графику. Кроме того, для монотонных процессов без
перехода кривой через линию установившегося значения, в качестве
SettlingMin принимается второй (более высокий) уровень оценки вре-
мени нарастания, а в качестве SettlingMax – значение Peak Amplitude,
т. е. смысл этих параметров теряется.
В случае, когда система неустойчива, либо установившееся зна-
чение не определяется, функция возвращает значения NaN и Inf
>> stepinfo(w)
ans =
RiseTime: NaN
SettlingTime: NaN
SettlingMin: NaN
SettlingMax: NaN
Overshoot: NaN
Undershoot: NaN
Peak: Inf
PeakTime: Inf
К сожалению, функция не выводит для информации установ-
ленные значения зоны Δ %Settling и диапазона времени нарастания
%Rise, хотя от этого зависят результаты. Например, переопределив
эти параметры на 5 % и 0-100 %, получим иные значения времени на-
растания и регулирования для той же самой кривой.
>> stepinfo(sys,'SettleTimeThreshold',0.05,...
264
'RiseTimeLimits',[0 1])
ans =
RiseTime: 1.6498
SettlingTime: 15.1031
SettlingMin: 0.1633
SettlingMax: 0.3716
Overshoot: 48.6365
Undershoot: 0
Peak: 0.3716
PeakTime: 2.5743
Более того, функция не подчиняется общим установкам ctrlpref
и LTIView-Toolbox Preferences по этим параметрам, поэтому для нее
их нестандартные значения необходимо устанавливать специально
перед обращением. Дополнением к штатной функции stepinfo() может
служить разработанная функция steps().
function steps(sys,st,rt)
% Расчет для sys прямых показателей качества с дополнительными параметрами
% st – зона delta, rt – диапазон для Rise Time, все в относительных единицах
if nargin<3 % если не заданы пользователем, то запрашиваем ctrlpref
P=timeoptions('cstprefs'); rt=P.RiseTimeLimits;
end
if nargin==1
st=P.SettleTimeThreshold;
end
Quality=stepinfo(sys,'SettleTimeThreshold',st,'RiseTimeLims',rt)
T=num2str(st); disp([' %Settling: ' T])
T=num2str(rt); disp([' %RiseTime: ' T])
yf=dcgain(sys); T=num2str(yf); disp([' FinalValue: ' T])
end
Для установившегося динамического режима принято опреде-
лять коэффициенты ошибок – позиционной С0, по скорости С1, по
ускорению С2, что и делает предлагаемая функция coef(sys). Здесь sys
– функция ошибки по задающему воздействию или возмущению.
function coef(sys)
% Расчет коэффициентов ошибок по заданной модели sys
if isstable(sys)
[num,den]=tfdata(sys,'v');
n=length(den);
b=num/den(n); a=den/den(n);
c0 = b(n)
if n>1
265
c1 = b(n-1) - a(n-1)*c0
end
if n>2
c2 = b(n-2) - a(n-2)*c0 - a(n-1)*c1
end
else
c0 = Inf, c1 = Inf, c2 = Inf
end
end
Результат выглядит следующим образом
>> a=[0 1 0;0 0 1;-4 -3 -2]; b=[0 0 1]'; c=[5 0 0]; d=0;
>> sys=ss(a,b,c,d);
>> coef(sys)
c0 =
1.2500
c1 =
-0.9375
c2 =
0.0781
Переходная характеристика и полученные по ней прямые оцен-
ки качества являются, как правило, главным критерием правильности
выбора параметров системы регулирования, в связи с чем целесооб-
разно внимательнее рассмотреть, как это делает MATLAB.
Оценим прежде, насколько едины в определениях показателей
качества регулирования авторы учебников СНГ. Для большинства из
них перерегулирование – это просто максимальное отклонение управ-
ляемой величины от установившегося значения, выраженное в про-
центах от него [6], относительное значение величины первого выброса
переходного процесса [7, 8]. Обычно подразумевается первое макси-
мальное отклонение, и время t
макс
должно измеряться для первого мак-
симума характеристики. Ряд авторов делает дальше уточнение – от-
клонение регулируемой величины от заданного значения в сторону,
противоположную начальному отклонению [9, 10], максимальный
«выбег» регулируемой величины в сторону, противоположную на-
чальному отклонению [11], в статических системах совпадающее по
знаку со статическим отклонением, статической ошибкой [12, 13].
Специально отмечают, что, так как любая реальная система об-
ладает инерционностью, то в момент задания скачка на входе h(0) = 0,
и, следовательно, в первый момент и разность h(∞)-h(t) всегда будет
максимальна. Поэтому определять отклонение в самый первый мо-
мент времени заведомо бессмысленно [13].
266
Для реакции на возмущение (m<n, астатическая система с b
m
=0)
перерегулирование определяется величиной h
макс
- h
у
, приходящейся
на единицу f(t) = 1(t). Иногда оно определяется и как отношение вто-
рого максимума характеристики к первому σ = h
макс,2
/h
макс,1
[14, 15].
У астатических систем с m = n происходит скачок начального
значения, конечное остается тем же, т. е. равно нулю, перерегулирова-
ние определяют как отношение первого максимального выброса к на-
чальному значению (h
0+
) [7].
Показателем качества является и само первое максимальное ди-
намическое отклонение h
макс
-h(∞), тогда указывают его допустимое
значение непосредственно в единицах измерения управляемой вели-
чины, задавая отдельно от перерегулирования [15]. Для тех переход-
ных процессов, где начальное и конечное значения регулируемой ве-
личины одинаковы, понятие перерегулирования теряет смысл. Оно
заменяется понятием максимального относительного отклонения,
равного отношению первого максимального отклонения к заданному
значению регулируемой величины. Подобный процесс всегда немоно-
тонный, но колебательным его называют лишь в случае изменения
знака отклонения [9].
Для процессов с различными начальным и конечным значения-
ми характеристику строят в относительных отклонениях, приняв на-
чальное значение кривой переходного процесса за нуль, а разность
между установившимся конечным и начальным значением до скачка
(предначальным) за единицу. В монотонном процессе перерегулиро-
вание равно нулю. В астатической системе оно теряет смысл, так как
знаменатель σ обращается в нуль. Вместо σ в этом случае пользуются
понятием максимального отклонения х
макс
при единичном воздействии
[11].
Таким образом, ходовая формула для вычисления перерегули-
рования состоит в делении разности максимального и установившего-
ся значений переходной характеристики на разность ее начального и
установившегося значений
)0(
max
hh
hh
у
у
.
Для оценки времени регулирования обычно принимают Δ = 5 %
от установившегося значения (предела W(s) при s=0), для возмущения
на входе объекта берут 5 % от коэффициента передачи объекта k
о
, для
возмущения на выходе объекта – 5 % от начального отклонения h(
+0
)
[15]. По аналогичным принципам выбирают зону 10-90 % для оценки
267
времени нарастания. С другой стороны считают также, что время ре-
гулирования – это время устранения рассогласования до 5 % его на-
чального значения [16]. Из всех приведенных формулировок следует,
что среди преподавателей единства в методах определения и смысле
основных параметров нет.
Надо сказать, что и авторы MATLAB допускают неточные или
противоречивые формулировки. Начнем с того, что в справке время
регулирования определяется по зоне 5 %, хотя заводская установка
равна 2 %, что может привести неопытного пользователя к ошибке.
Peak Amplitude в разных местах документации определяется то
как наибольшее абсолютное значение реакции y(t), т. е. наибольшее
отклонение от нуля независимо от знака, то как наибольшее отклоне-
ние от установившегося значения, что совсем не одно и то же. Время
нарастания Rise Time определяется по уровням от установившегося
значения Final Value – в одном случае, от разницы между установив-
шимся и начальным значениями – в другом случае, фактически вы-
числяется именно по разнице. Зона для вычисления времени регули-
рования определяется в процентах от установившегося значения (по
справке), а на самом деле от максимальной абсолютной разницы меж-
ду текущим у(t) и установившимся значениями. Перерегулирование
Overshoot определяется величиной, на которую сигнал реакции пре-
вышает установившееся значение, и находится в процентах от устано-
вившегося значения (фактически), но в другом месте документации –
от разницы между установившимся и начальным значениями. То же
относится и к начальному провалу Undershoot – относительной вели-
чине первого отклонения от начального значения в сторону, противо-
положную направлению к установившемуся значению.
Уже это несовпадение формулировок в документации и про-
грамме говорит о возможности появления ошибок при оценке нестан-
дартных характеристик. Рассмотрим, как принятый в MATLAB под-
ход влияет на значения прямых показателей качества.
Заметим попутно, что при исследовании систем регулирования
возможны три типа передаточных функций: с m = 0 (нули отсутству-
ют) – такова главная передаточная функция от входа задания r(t) к ре-
гулируемому выходу y(t); с m = n (порядок полинома числителя m ра-
вен порядку полинома знаменателя n) – это соответствует функции
передачи ошибки регулирования от задания; с 0 < m < n (это функции
влияния возмущения на регулируемую величину и ошибку регулиро-
вания).
Для систем с m = n MATLAB допускает неверное определение
значений перерегулирования и времени достижения максимума. Здесь
268
фиксируется отклонение в момент начала процесса. Такой подход
противоречит идее, что перерегулирование связано с забросом за ли-
нию установившегося значения при движении к ней от начального
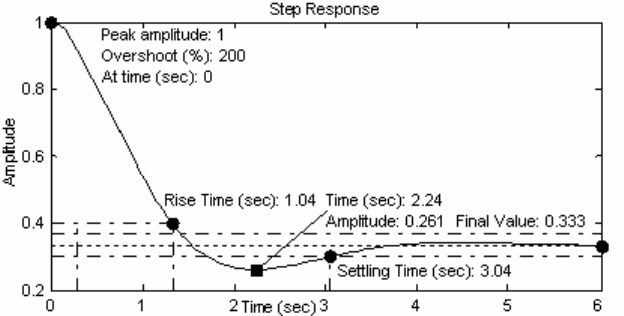
значения. Так, для передаточной функции ошибки статической систе-
мы W(s) = (s^2+2s+1)/(s^2+2s+3) перерегулирование (Overshoot) на
графике переходной функции охарактеризовано значением 200 % (ри-
сунок 4.37), тогда как при оценке корневым методом по полюсам пе-
редаточной функции для той же самой системы программа MATLAB
дает значение перерегулирования только 10.8 %.
Рисунок 4.37
При стандартном расчете по кривой перерегулирование равно
σ = (0.333-0.261)/(1.000-0.333) = 0.072/0.667 = 0.108, т. е. те же 10.8 %.
Это же значение 10.8 % выводит программа по переходной характери-
стике при полном удалении из системы нулей (m = 0), например, для
главной передаточной функции W(s) = 3/(s^2+2s+3). Как же следует
оценить нашу систему в MATLAB по величине перерегулирования –
она плохая (200 %) или хорошая (10.8 %)?
В то же время величину Δ для оценки времени регулирования
рассматриваемого переходного процесса программа берет в соответ-
ствии с рекомендуемым подходом, как 5 % от разницы начального
(максимального) и установившегося значений 0.05∙(1.000-0.333) =
= 0.05∙0.667=0.033. Этот же подход применен для расчета времени на-
растания, которое находится здесь правильно, но в противоречии с
определением – оно должно измеряться на пути к максимуму, до, а не
после него. Значит, либо время нарастания измеряется неверно, либо
это максимум не настоящий, что и есть на самом деле.
Пример говорит о том, что программа не различает относитель-
ную величину – перерегулирование, и абсолютную величину – мак-
симальное динамическое отклонение, поэтому к результатам модели-
рования следует подходить внимательно, проверяя их по возможности
269
иными способами и представляя примерно ожидаемый результат.
Понятно, что в соответствии с теоремой о начальном значении
переходной функции пик характеристики в момент t = 0 определялся
не характеристическим полиномом системы, т. е. ее собственными
свойствами, а отношением коэффициентов при старших степенях s в
числителе и знаменателе передаточной функции. А оно не связано не-
посредственно с собственными свойствами системы и, естественно, не
может вытекать из расположения нулей и полюсов на комплексной
плоскости. Таким образом, временные и корневые модели в MATLAB
могут при оценке качества регулирования даже систем второго поряд-
ка давать существенно противоречащие друг другу результаты.
MATLAB считает максимумом (Peak Response) наибольшее аб-
солютное значение характеристики max(abs(y)) – не сказано, что пер-
вое, и не обязательно с переходом через линию установившегося зна-
чения, что в учебной литературе СНГ подразумевается.
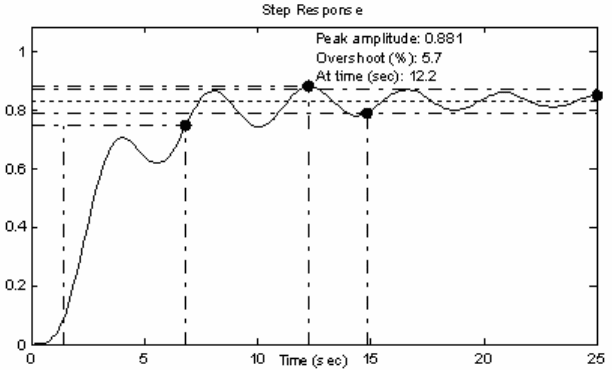
Поэтому MATLAB берет на кривой (рисунок 4.38) не первый, а
третий максимум, т. е. не локальный максимум и не первый по поряд-
ку, а просто наибольший (абсолютный). Естественно, полученный ре-
зультат не будет совпадать с корневыми оценками и со стандартным
определением t
max
(время первого максимума), которое, может быть,
при работе со студентами следует скорректировать.
Рисунок 4.38
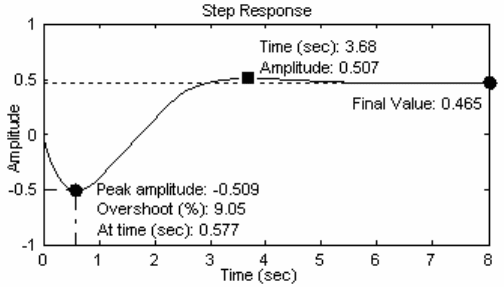
Реакция системы W(s) = (-2s+0.93)/(s^2+2s+2) (рисунок 4.39)
выявляет три ошибки, связанные, на наш взгляд, с понятием Peak. Во-
первых, на графике отображается отрицательное значение -0.509, а
функция stepinfo() выводит положительное 0.509. Почему для одного
и того же понятия используются разные методы определения, извест-
но только создателям MATLAB, однако, для того, чтобы узнать на са-
270
мом деле, отрицательный это максимум или положительный, необхо-
димо каждый раз дополнительно к функции stepinfo() строить график,
что существенно снижает ценность этой функции.
Рисунок 4.39
Во-вторых, для оценки перерегулирования требуется не наи-
большее отклонение вообще, а максимальное отклонение кривой от
линии установившегося значения после пересечения кривой этой ли-
нии – на графике это точка с амплитудой 0.507 для времени 3.68 с (на-
зовем ее OverPeak). А то, что на графике помечено как Peak amplitude,
это наибольший начальный провал Undershoot, имеющий для оценки
качества регулирования второстепенное значение.
В-третьих, хотя перерегулирование Overshoot печатается для
точки Peak amplitude при времени 0.577 с, вычислено оно для точки
настоящего максимума 100*(0.507/0.465-1)=9.05, что вводит пользо-
вателя в заблуждение. Нигде никак не показано, для какой точки в
действительности вычислено перерегулирование, об этом можно
только догадываться. Очевидно, необходимо разделить вообще мак-
симальное значение и тот максимум (минимум) характеристики, на
котором определяется перерегулирование – эти точки Peak и OverPeak
не всегда совпадают.
Если установившееся значение характеристики yf = 0, програм-
ма сразу присваивает перерегулированию значение Inf. В результате
для случая ненулевого начального значения (рисунок 4.40, а) пере-
ходной характеристики системы с ПФ w = tf(-[1 2 0],[1 1 2]) функция
stepinfo() выводит три неверных результата Overshoot: Inf, Undershoot:
Inf, Peak: 1.17, тогда как на самом деле должно быть Peak: 0.359 (если
мы договорились указывать точку OverPeak) или хотя бы Peak: -1.17,
как на графике, Undershoot: 17 % и Overshoot: 35.9 % (вычисляется по
отношению полуволны переброса 0.359 к начальному значению 1).
Кроме того, неверно определяется база для оценки времени регулиро-
вания 1.17 вместо 1.0, добавляется начальный провал Undershoot.