Бороденко В.А. Исследование систем управления в среде MATLAB
Подождите немного. Документ загружается.

271
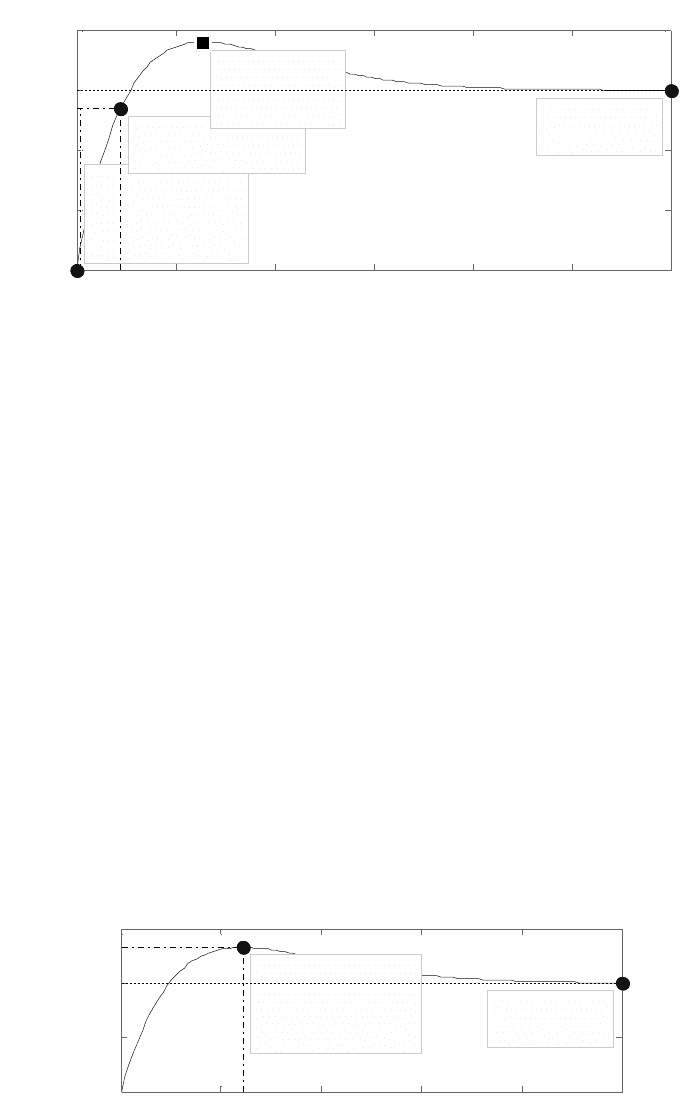
С точностью до наоборот ошибки повторяются для системы с
передаточной функцией w = tf([1 2 0],[1 1 2]) – рисунок 4.40, б).
а б
Рисунок 4.40
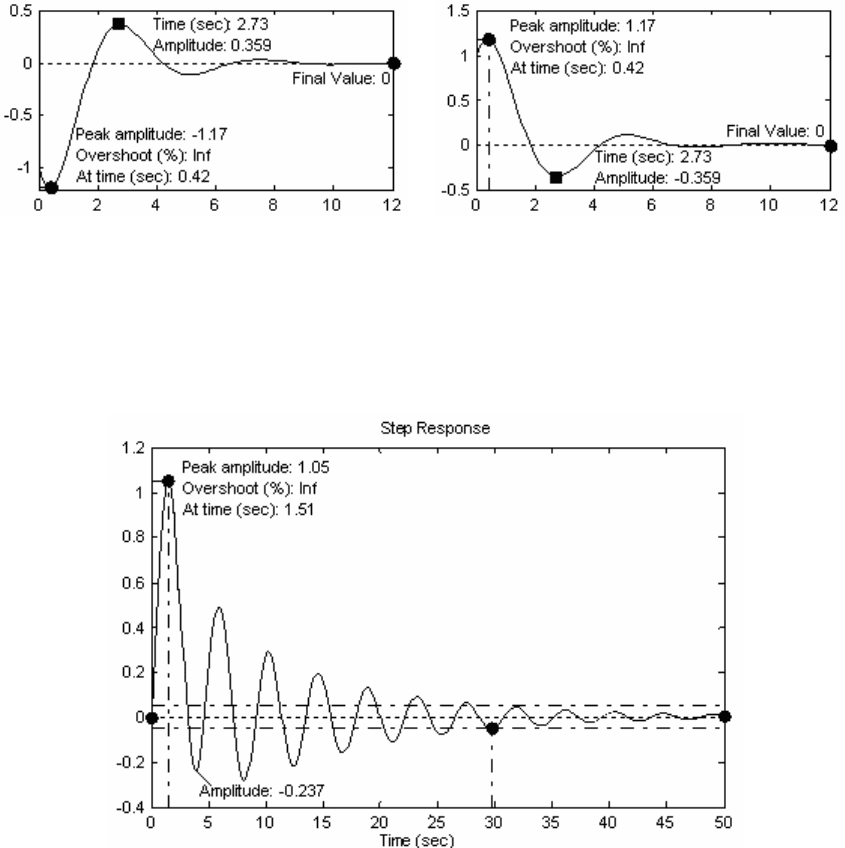
У системы W(s)=(s^3+2s^2+3s)/(s^4+2s^3+3s^2+4s+1.2) пере-
ходная характеристика начинается и заканчивается в нуле (рисунок
4.41).
Рисунок 4.41
Значение перерегулирования по графику равно бесконечности
Inf. Карта корней дает иное значение 83.5 %. Если же последовать
обычным рекомендациям, то перерегулирование следует в этом слу-
чае считать как отношение максимума к единичному скачку, т. е.
105 %, либо как отношение второй полуволны к первой, или
0.237/1.05 = 0.226 (22.6 %). В последнем случае система удовлетворя-
ет стандартным требованиям σ = 15-30 %.
Перейдем к характеристикам с конечным значением yf ≠ 0.
Для w=tf([-1 2 1],[1 2.5 2]) Stepinfo возвращает значения Over-
shoot: 79.8823, хотя должно быть 100*0.4/1.5 = 26.67, Undershoot: 200,
272
а нужно 0, т. к. это не начальный провал, и положительное значение
Peak: 1, хотя по графику это -1, а на самом деле 0.899 (рисунок 4.42).
Step Response
Amplitude
0 1 2 3 4 5 6
-1
-0.5
0
0.5
1
System: w
Peak amplitude: -1
Overshoot (%): 79.9
At time (sec): 0
System: w
Rise Time (sec): 0.418
System: w
Final Value: 0.5
System: w
Time (sec): 1.28
Amplitude: 0.899
Рисунок 4.42
Расчет перерегулирования производится для правильно выбран-
ного места максимума (в точке OverPeak с амплитудой 0.899 при вре-
мени 1.28 с), правда, при неправильно выбранной базе 0.5 вместо 1.5.
А выводится значение перерегулирования, как уже говорилось, в дру-
гой точке – точке мнимого максимума Peak, что может привести к не-
верным предпосылкам. Таким образом, глядя на график, нужно само-
му догадываться, к какой точке характеристики относится выведенное
значение перерегулирования.
Введя ПФ w=tf([-0.5 2 1],[1 2.5 2]), уменьшили начальное значе-
ние и максимум переместился, но перерегулирование по-прежнему
рассчитывается неверно – надо 100*(0.825-0.5)/(0.5+0.5)=32.5 %, а не
64.9 % (рисунок 4.43). И Undershoot отсутствует, а не равно 100 %, как
показывает stepinfo(). Иначе говоря, при разнополярных начальном
y(0) и установившемся yf значениях перерегулирование всегда будет
рассчитываться неправильно из-за неверного выбора базы – в про-
грамме за базу для расчета принимается только yf, а нужно (yf-y(0)).
Step Response
Amplitude
0 1 2 3 4 5
-0.5
0
0.5
1
System: w
Peak amplitude: 0.825
Overshoot (%): 64.9
At time (sec): 1.22
System: w
Final Value: 0.5
Рисунок 4.43
Если первое отклонение от нуля больше, чем последующие, и
они разнополярны, как для w=tf([1 1 -1],[1 0.7 4]), stepinfo(w) выводит
273
Overshoot: 288.0443, Undershoot: 400, Peak: 1, тогда как на самом деле
должно быть Overshoot = 100(0.97-0.25)/1.25 = 57.6 %, Undershoot = 0
и Peak = -0.97 (рисунок 4.44).
Step Response
Amplitude
0 2 4 6 8 10 12 14 16
-1
-0.5
0
0.5
1
System: q
Final Value: -0.25
System: q
Peak amplitude: 1
Overshoot (%): 288
At time (sec): 0
System: q
Time (sec): 1.65
Amplitude: -0.97
Рисунок 4.44
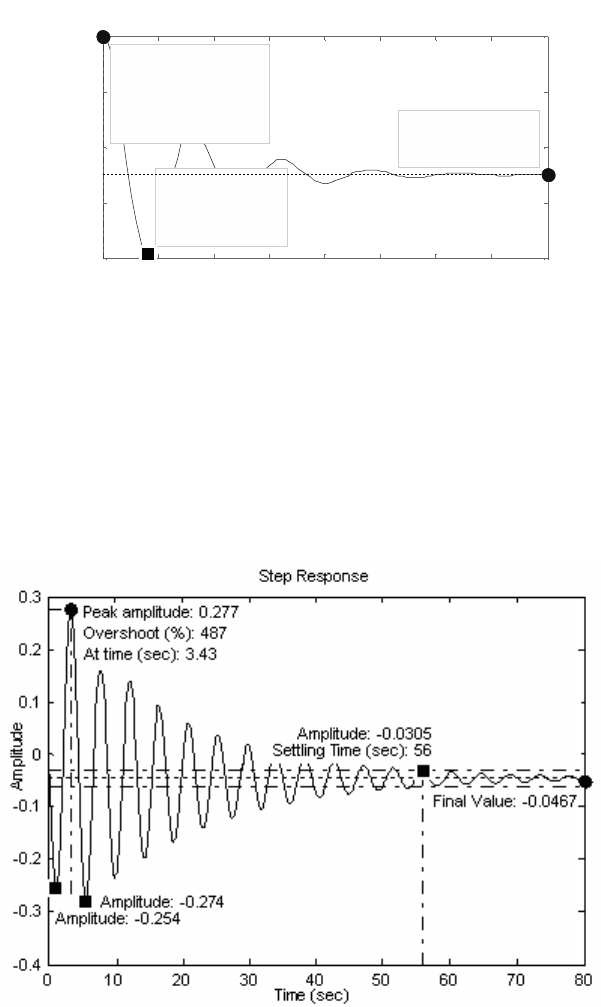
Для w=(-0.1 s^3 – s^2 – 0.07)/( s^4 + 2 s^3 + 3 s^2 + 4 s + 1.5) про-
грамма выбирает в качестве максимума экстремум обратной полувол-
ны. В версии 7.01 для этой системы имело место даже отрицательное
значение перерегулирования -691 %, хотя в учебной литературе СНГ
подобное не предусмотрено. В версии 7.11 перерегулирование поло-
жительно и имеет другую величину 487 % (рисунок 4.45).
Рисунок 4.45
Здесь опять имеет место расхождение: программа показывает
пик на положительной полуволне с амплитудой +0.277, а вычисляет
Overshoot для второй отрицательной полуволны с амплитудой
-0.27377, а именно -0.274/(-0.0467)-1 = 4.8672. Вычисляется время ре-
274
гулирования от базы 0.3232=0.27653+0.046667, а надо от yf = 0.0467,
т. к. кривая начинается от нуля. В итоге зона Δ в семь раз больше, чем
должна быть, и, естественно, ошибочно выводится существенно мень-
шее время регулирования.
Еще о проблемах при оценке времени регулирования.
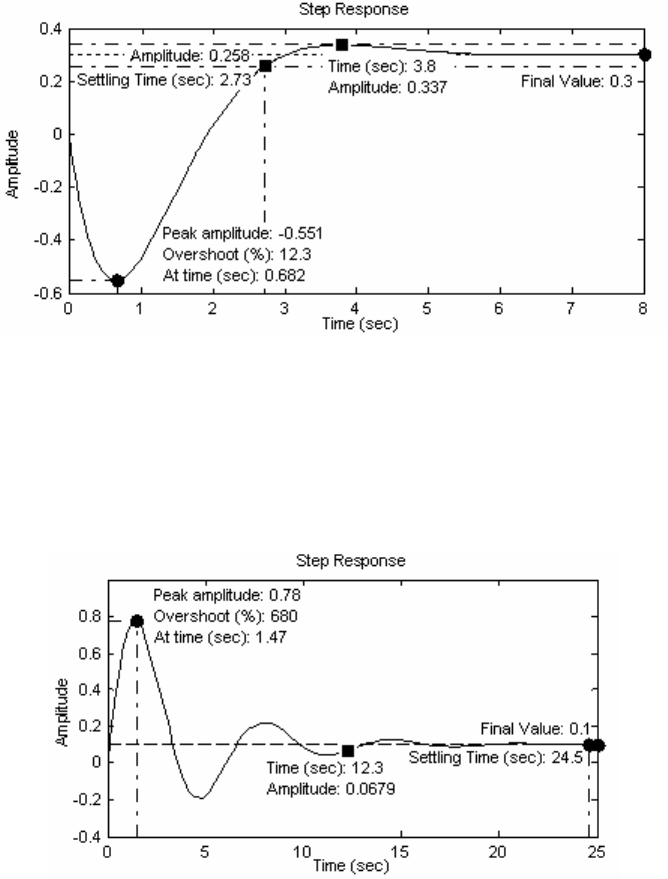
Анализируя систему w=tf([-2 .6],[1 2 2]), программа берет для
определения времени регулирования базу 0.55+0.3=0.85, а не 0.3, счи-
тая Δ = 0.05*max(abs(y(t)-yf)). Указанную базу следовало бы для слу-
чая yf ≠ 0 принимать равной abs(yf - y(0)), как это предусмотрено для
времени нарастания. Реальное (при базе 0.3) время регулирования для
тех же 5 % будет уже 4.97 с, а не 2.73 с, т. е. возросло почти в два раза
(рисунок 4.46).
Рисунок 4.46
Построим переходную характеристику для w=tf([1 .1],[1 .5 1]).
Если бы программа выбирала базу для оценки времени регулирования
0.1, а не ошибочную 0.68, время регулирования изменилось бы от 12.3
до 24.5 с, т. е. возросло в два раза (рисунок 4.47).
Рисунок 4.47
275
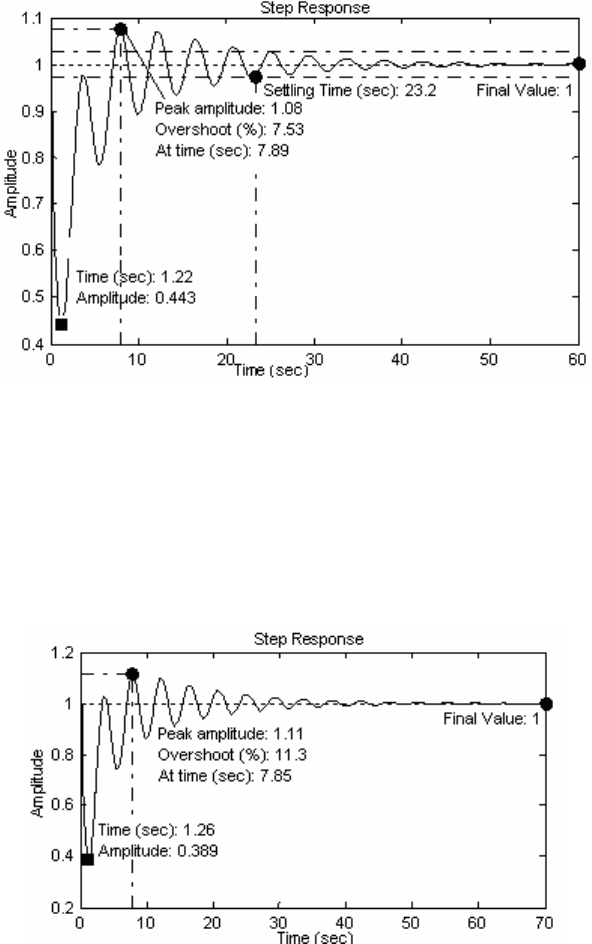
Для системы w=tf([0.9 1 2 2 1.2],[1 2 3 4 1.2]) с ненулевым на-
чальным значением (рисунок 4.48) базу для расчета времени регули-
рования программа принимает по начальному провалу Undershoot
0.9 - 0.443 = 0.557, а не по разнице начального и установившегося зна-
чений 0.1 – соответственно, это приводит к неверному определению
времени регулирования. Зато функция stepinfo() выводит значение на-
чального провала Undershoot: 0, что не совпадает с графиком и опре-
делением. Таким образом, ошибка в определении времени регулиро-
вания будет иметь место всегда при разнополярных y(0) и yf, а также
при выполнении условия |max(y-yf)|>|yf-y(0)|.
Рисунок 4.48
Для системы w=tf([1 1 2 2 1.2],[1 2 3 4 1.2]) с y(0) = yf (рисунок
4.49) программа принимает за базу для расчета времени регулирова-
ния величину начального провала 1 – 0.389 = 0.611, тогда как для рас-
чета перерегулирования в качестве базы берет 1. Между тем, функция
stepinfo() по-прежнему говорит, что Undershoot: 0.
Рисунок 4.49
276
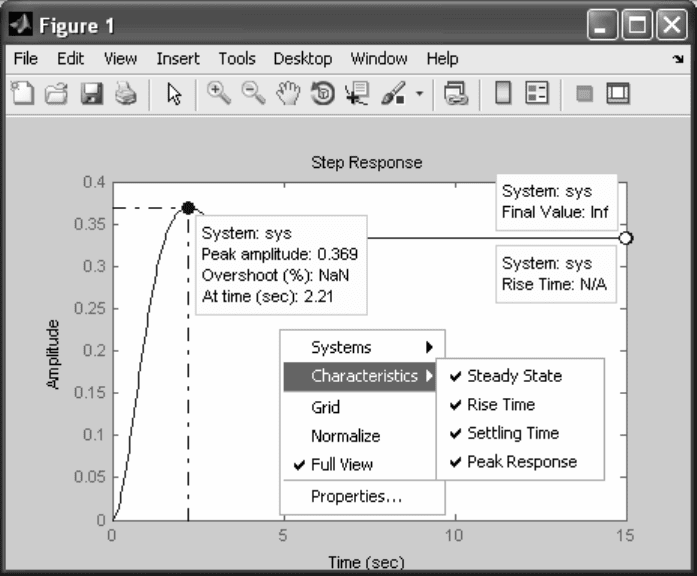
Интересные результаты получаются и при анализе показателей
качества системы с ПФ W(s) = s/(s^3 + 2s^2 + 3s). Хотя вид кривой
вполне приемлем для анализа (рисунок 4.50), выводится значение Inf
вместо 0.333 для установившегося значения, вычисляемого функцией
dcgain(), не определяется время нарастания, время регулирования, пе-
ререгулирование равно NaN вместо 10.8 %. А параметры, предостав-
ленные функцией stepinfo() для этой же системы, либо не совпадают с
указанными на графике, либо не имеют смысла.
>> stepinfo(sys)
ans =
RiseTime: 14.1957
SettlingTime: 17.3897
SettlingMin: 0.3333
SettlingMax: 0.3333
Overshoot: 4.4409e-014
Undershoot: 0
Peak: 0.3333
PeakTime: 53.2337
Рисунок 4.50
В то же время не по системе, а по переходной характеристике
этой же системы функция выводит вполне нормальные значения
>> [y,t]=step(w,15);

277
>> St=stepinfo(y,t)
St =
RiseTime: 1.0402
SettlingTime: 3.4043
SettlingMin: 0.3044
SettlingMax: 0.3695
Overshoot: 10.8440
Undershoot: 0
Peak: 0.3695
PeakTime: 2.2125
Поскольку ранее уже отмечалось, что, в отличие от графика,
функция stepinfo() выводит не действительное значение y(t) в точке
Peak, а его модуль, то, вероятно, и другие показатели качества регули-
рования вычисляются для функций step() и stepinfo() разным образом,
что и проявилось в данном примере.
Таким образом, результаты, получаемые при моделировании в
MATLAB, могут противоречить как собственным формулировкам
программы, так и определениям, традиционным для учебной литера-
туры СНГ. Их следует использовать достаточно осторожно, особенно
для случаев, когда переходная характеристика начинается не с нуля
(т. е. при m = n); заканчивается в нуле (астатические звенья, b
m
= 0);
начинается и заканчивается на одном и том же уровне; имеет разно-
полярные значения.
4.5 Проектирование ПИД регулятора
Для решения этой задачи в MATLAB предусмотрены средства
PID Tuner и SISO Design Tool.
ПИД регулятор представляется в параллельной PID и стандарт-
ной PIDSTD формах. Функция comp = pid(Kp,Ki,Kd,Tf) формирует не-
прерывный параллельный регулятор с независимыми пропорциональ-
ным Kp, интегральным Ki, дифференциальным Kd коэффициентами
усиления и постоянной времени инерции Tf дифференциального
фильтра (реального дифференцирующего звена)
sTf
Kd
s
KiKp
sTf
sKd
s
Ki
KpsW
PID
1
1
1
)(
.
Все числа должны быть вещественными, конечными, а постоян-
ная времени – неотрицательной, по умолчанию Kp=1, Ki=0, Kd=0 и
Tf=0. Задавая лишь часть параметров, получаем разный тип регулято-
ра, например, П-регулятор при задании pid(Kp), ПИ-регулятор при за-
дании pid(Kp,Ki), И-регулятор при задании pid(0,Ki), ПИД-регулятор

278
при задании pid(Kp,Ki,Kd), ПИД-регулятор с реальным дифференци-
рующим звеном (PIDF) при задании pid(Kp,Ki,Kd,Tf).
Функция comp=pidstd(Kp,Ti,Td,N) создает непрерывный PID ре-
гулятор в стандартной форме с общим пропорциональным коэффици-
ентом усиления Kp, постоянными времени интегрирования Ti и диф-
ференцирования Td и делителем N инерционной постоянной времени
sNTd
Td
sTi
Kp
sNTd
sTd
sTi
KpsW
PIDSTD
1/
11
1
1)/(
1
1)(
.
Все числа должны быть вещественными, Kp и Td – конечными,
постоянная времени Td – неотрицательной, постоянная времени Ti и
делитель N – положительными. По умолчанию Kp=1, Ti=Inf, Td=0 и
N=Inf. Задавая часть параметров, получаем разный тип регулятора,
например, П-регулятор при задании pidstd(Kp), ПИ-регулятор при за-
дании pidstd(Kp,Ti), ПИД-регулятор при задании pidstd(Kp,Ti,Td),
ПИД-регулятор с реальным дифференцирующим звеном (PIDF) при
задании pidstd(Kp,Ti,Td,N). И-регулятор реализуется приблизительно,
коэффициенты составляющих равны Ki = Kp/Ti, Kd = Kp*Td.
Функции pid(sys) и pidstd(sys) преобразуют систему sys в PID
или PIDSTD объект, если это допускают параметры системы, для мас-
сива объектов sys формируется массив PID или PIDSTD объектов.
Создадим PID и PIDSTD объекты regp и regs, исследуем их свойства
>> regp=pid(3,0.1,0.01)
Continuous-time PID controller in parallel form:
1
Kp + Ki * --- + Kd * s
s
with Kp = 3, Ki = 0.1, Kd = 0.01
>> get(regp)
Kp: 3
Ki: 0.1000
Kd: 0.0100
Tf: 0
IFormula: ''
DFormula: ''
InputDelay: 0
OutputDelay: 0
Ts: 0
TimeUnit: ''
InputName: {''}
279
InputUnit: {''}
InputGroup: [1x1 struct]
OutputName: {''}
OutputUnit: {''}
OutputGroup: [1x1 struct]
Name: ''
Notes: {}
UserData: []
>> regs=pidstd(3,0.1,0.01)
Continuous-time PID controller in standard form:
1 1
Kp * (1 + ---- * --- + Td * s)
Ti s
with Kp = 3, Ti = 0.1, Td = 0.01
>> get(regs)
Kp: 3
Ti: 0.1000
Td: 0.0100
N: Inf
IFormula: ''
DFormula: ''
...и так далее
Как видно из распечатки, индивидуально задаются свойства Kp,
Ki, Kd, Tf – для объекта типа PID, Kp, Ti, Td, N – для объекта типа
PIDSTD; свойства Iformula, Dformula необходимы только для дис-
кретных регуляторов и в непрерывных моделях игнорируются. Ос-
тальные свойства те же, что и для других LTI объектов.
Как и у других LTI-объектов, можно извлечь характеризующие
регулятор параметры или преобразовать структуру регулятора
>> [Kp,Ki,Kd,Tf]=piddata(regp)
Kp =
3
Ki =
0.1000
Kd =
0.0100
Tf =
0
>> [Kp,Ti,Td,N]=pidstddata(regs)
Kp =
3
Ti =
280
0.1000
Td =
0.0100
N =
Inf
>> [Kp,Ti,Td,N]=pidstddata(regp) % из другой формы
Kp =
3
Ti =
30
Td =
0.0033
N =
Inf
>> rg=pid(regs) % преобразование формы регулятора
Continuous-time PID controller in parallel form:
1
Kp + Ki * --- + Kd * s
s
with Kp = 3, Ki = 30, Kd = 0.03
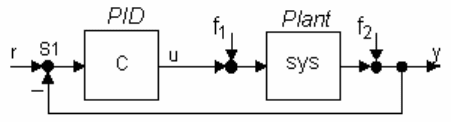
Конструктор PID Tuner предназначен для проектирования в ин-
терактивном режиме PID регулятора в прямой цепи замкнутой SISO
системы регулирования с главной единичной отрицательной обратной
связью (рисунок 4.51)
Рисунок 4.51
Для регулятора С необходимо задать его тип (P, I, PI, PD, PDF,
PID, PIDF) и форму описания (параллельная parallel или стандартная
standard). Команда pidtool(plant, 'type') вызывает конструктор для
имеющегося объекта управления plant с указанием типа регулятора в
виде строковой переменной 'type', по умолчанию используется парал-
лельная форма. При обращении pidtool(plant, cbase) проектирование
ведется в сравнении с образцовым регулятором cbase и результирует-
ся в виде регулятора того же типа и формы.
Выведенное диалоговое окно позволяет выбирать способ синте-
за Design Mode (Basic, Extended), форму описания Form (Parallel, Stan-
dard), тип регулятора Type (P, I, PI, PD, PDF, PID, PIDF), тип графика
Plot (Step, Bode) и вид анализируемой реакции в меню Response: