Canete J.F. System Engineering and Automation: An Interactive Educational Approach
Подождите немного. Документ загружается.

8 1 Introduction to Systems
Solution
Comparing both differential equations, it is clear that both systems are analogous.
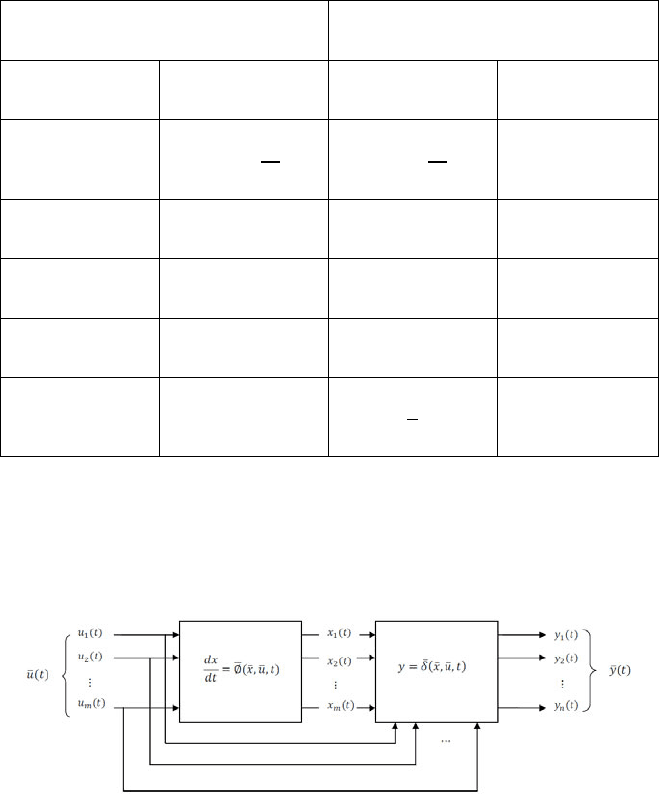
It is also possible to establish a table of equivalences between the variables and
parameters of both analog systems (table 1.1).
Table 1.1 Equivalences by analogy between mechanical and electrical systems
Mechanical System
Electrical System
displacement
charge
velocity
current
force
voltage
mass
inductance
damping
resistance
stiffness
1
capacitance
-1
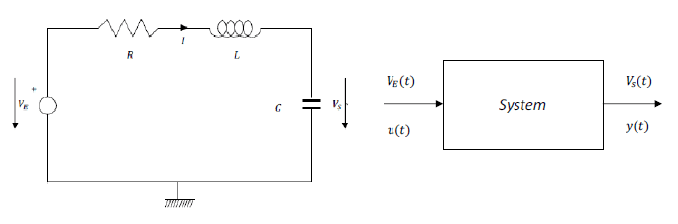
1.3.2 Internal Description
The internal description is based on the indirect relationship between the input
and the output
of the system through the system state (fig. 1.11).
Fig. 1.11 Internal description of a continuous system.
1.3 Systems Description 9
The state of a dynamic system is defined by the minimum set of variables
,
,…,
such that the knowledge of the value of xt
0
together with the knowledge of the input
,
, completely determines the
system behavior for
.
The internal description is given in general by the state transition and the state
output equations. The state transition equations can be described by a set of n
independent differential equations in the following form
,
,…,
,
,
,…,
,
,
,…,
,
,
,…,
,
,
,…,
,
,
,…,
,
(1.4)
with
,1,…., non-linear in general. The parameter n is denoted as the
system order, and plays a fundamental role for the system behavior.
In the same way, the state output equations can be described by a set of s
independent differential equations in the following form
,
,…,
,
,
,…,
,
,
,…,
,
,
,…,
,
,
,…,
,
,
,…,
,
(1.5)
also with δ
,i1,….,s non-linear in general.
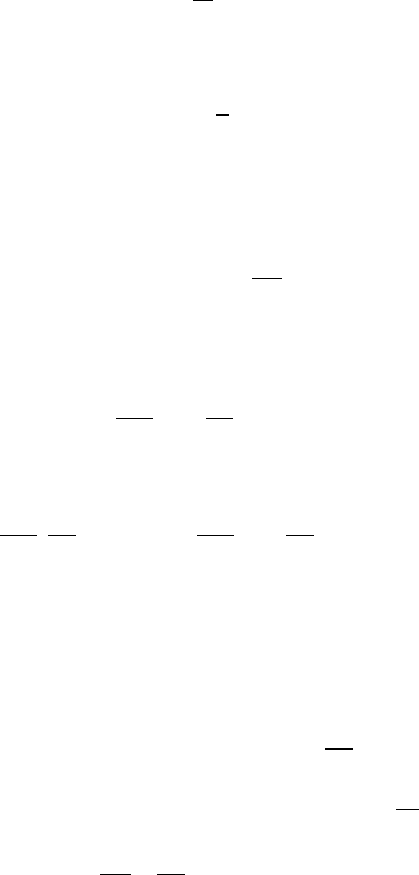
Example 1.3
Determine the external and internal description corresponding to the electric
circuit of fig. 1.12 with V
t and V
t considered as input ut and output yt of
the system respectively and system state defined by
,
.
Fig. 1.12 Electric circuit for example 1.3
10 1 Introduction to Systems
Solution
Applying the Kirchoff law for the electric circuit we have
and the capacitor charge is given by
1
Therefore, in order to derive the external description we must find the relationship
between
and its derivatives and
and its derivatives. Thus, solving for
we have
Substituting this equation into the first one we finally obtain the external
description, that is,
which can be expressed alternately as
,
,
,
0
,,,
0
In order to derive the internal description, we have to select the state variables, as
many as the order of the system is, in this case 2, which coincides with the
maximum order in the derivative of the output
. In this way
,
,
Then, by using the state variables assignment and solving for
we have
,
,

1.3 Systems Description 11
1
,
,
together with
,
,

Chapter 2
System Modeling
System Modeling
System modeling is rather a difficult task, since it requires experience, practice,
and intuition to be a good system modeler. The bases for the building of
mathematical models are the fundamental physical laws, such as the laws of
conservation of mass, energy, and momentum.
In this chapter, we deal with the concept of model and illustrate the process to be
followed to develop a model of a dynamical system in general. Also, the dynamical
equations in the form of differential equations that describe the system will be
obtained, as well as the transfer functions when linear behavior is present.
Finally, we end by describing the modeling of continuous systems corresponding
to the electrical, mechanical, hydraulic, thermal, and hybrid systems among others.
Some examples have been included to help the reader to clarify the methodology
used here, to derive the dynamical equations, and we have also implemented these
examples by using both the SIMULINK and SIMSCAPE modeling environments.
2.1 System Model
In almost all areas of engineering, considerable efforts are directed toward
acquiring information on various aspects of system performance, which is called
system analysis.
Traditionally, the system analysis was carried out using the physical system
subjected to test input signals, observing its corresponding response. Nevertheless,
this is not always feasible, since either the extent to which the parameters of the
physical system can be varied is very limited or there are imposed restrictions to
the application of these input tests (i.e. system analysis in human physiology).
In order to overcome these problems, a simplified representation of the physical
system under analysis is developed instead, what is called system model.
The system model may be either mental, when expressed through an abstract
description of the relationships among the system variables, or formal model, when
using graphs, diagrams, and mathematical equations derived from the mental model
used to describe the system behavior. The formal model is more explicit than a
mental model, and its implementation in the computer produces the computer model.
14 2 System Modeling
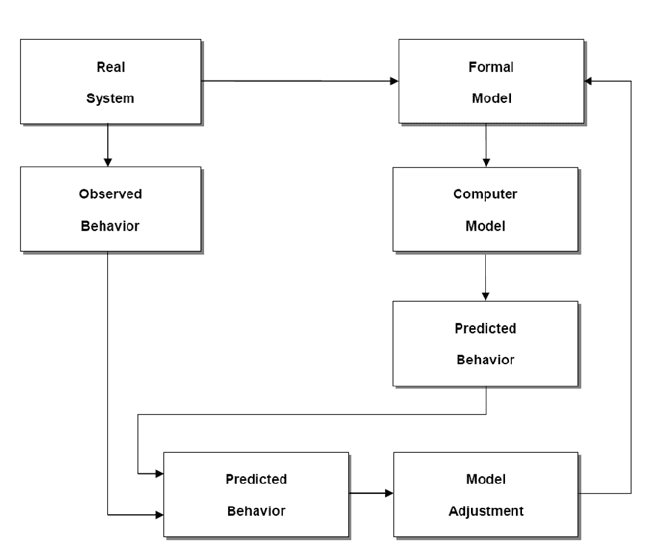
The building process followed to obtain a computer model is represented in
fig. 2.1. Starting from the observation of the real physical system behavior, and
using information through expert opinion and the literature, a formal model is
derived, by identifying the elements of the model and their interrelationships.
After establishing the formal diagrams relating to the formal model, we
calculate the dynamic equations of the model and its implementation is done on
computer by using an appropriate language to process the set of dynamic
equations. The computer model is used to predict the behavior of the real system,
so that we proceed to model validation by comparing the observed and predicted
behavior, and in case of discrepancy, adjustment is made for improvement of the
formal model.
Fig. 2.1 Building process diagram for system modeling.
The process of building a system model is not linear, passing in successive
stages by progressively improved models. In the successive stages is performed
phasing more simplifying assumptions, so that the system model is moving ever
closer to reality.
Thus, system models should be as simple as possible, and each model should be
developed with a specific application in mind.
2.2 System Dynamic Equations 15
System models can be grouped according to several different criteria:
1. Linear/Nonlinear, depending on the application of the principle of
superposition to system dynamic equations
2. Distributed/Lumped, depending on the variables dependency as function
of spatial coordinates and time in dynamic equations.
3. Time-Varying/Stationary, depending on the variations of system model
parameters in time, in dynamic equations.
4. Continuous/Discrete, depending on time variable definition over
continuous o distinct values range.
The type of system models we are going to discuss are referred to linear, lumped,
stationary, and continuous systems in the first part of the book, leaving the
nonlinear and time-varying system behavior for the second part.
2.2 System Dynamic Equations
A methodology for developing system models described by dynamic equations is
going to be developed and applied to electrical, mechanical, hydraulic, thermal,
and hybrid systems.
These equations are going to be derived by decomposing the overall system in
simple subsystems, so that the application of conservation laws (mass,
momentum, energy ...) in each subsystem, together with the constitutive equations
of each element will enable the obtaining of the dynamic equations. Finally,
programming software as SIMULINK or SIMSCAPE will be used to derive the
computer model.
For this purpose, the use of generalized variables will be considered, the variable
flow (f) on the dynamic element and the variable effort (e) along the element, being
the variable power (P) the product of both variables. Also we can define the variable
displacement (q) as the integral of flow, the variable momentum (p) as the integral
of effort and the variable energy (E) as the integral of power.
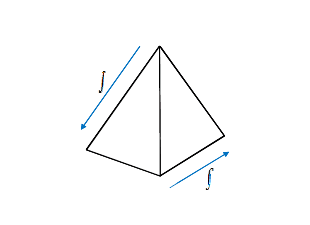
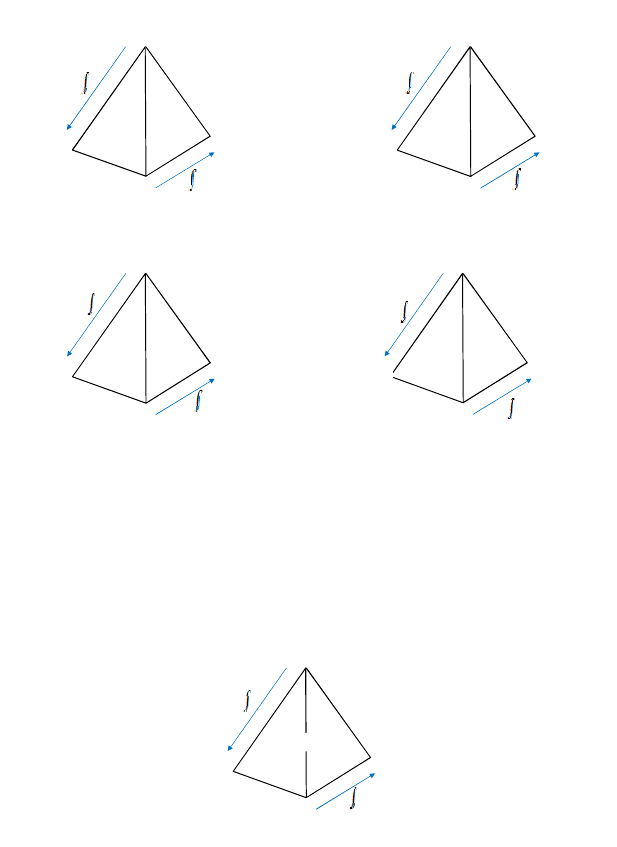
These relations between generalized variables can be represented as a
thetraedron (fig. 2.2), and the application to electrical, mechanical, hydraulic, and
thermal systems is straightforward by selecting adequately the corresponding
generalized variables (fig. 2.3).
Fig. 2.2 Generalized variables used for system modeling and its relations.
effort
e
f
flow
q
displacement
p
momentum
effort
e
f
flow
q
displacement
p
momentum
effort
e
f
flow
q
displacement
p
momentum
16 2 System Modeling
Fig. 2.3 Generalized variables relations for electrical, mechanical, hydraulic, and thermal
systems
Similarly, the linkages between the generalized variables give rise to the
concepts of resistance (R), capacitance (C), and inertia (L) characterizing the
components of the system models (fig. 2.4).
Fig. 2.4 Linkages between generalized variables for system models
The linkage between effort and flow variables defines the resistive element,
generally a non-linear relationship, which in the linear case defines the resistance
parameter R that characterizes the dynamic property of this element.
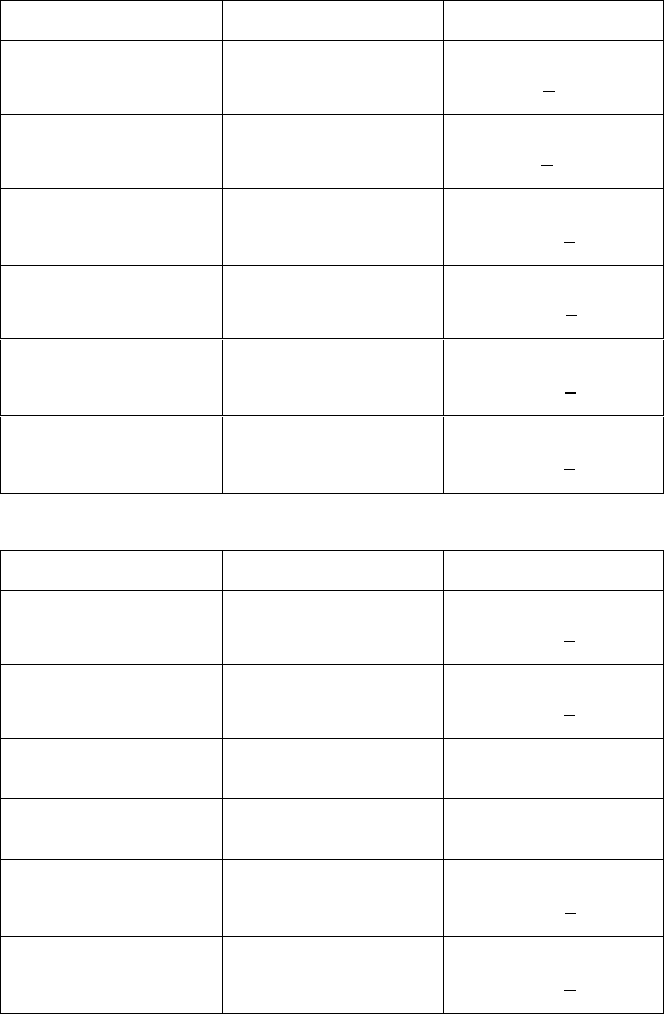
Table 2.1 defines the general nonlinear relationship both in direct and inverse
form, the linear relationship, and the dimension of resistance for electrical
systems, mechanical displacement and rotation systems, hydraulic systems and
thermal systems.
voltage
e
f
current
q
charge
p
flux linkage
force
e
f
velocity
q
displacement
p
momentum
pressure
e
f
flowrate
q
volume
p
pressure
momentum
temperature
e
f
heat flow
q
cumulated heat
p
temperature
momentum
p
inertia
capacitance
e
f
q
resistance
2.2 System Dynamic Equations 17
Table 2.1 Resistive elements relations between generalized variables.
General
Relation
Linear
Relation
Generalized Variables
Electrical
Mechanical Translation
Mechanical Rotation
Hydraulic
Thermal
Table 2.2 Capacitive elements relations between generalized variables.
General
Relation
Linear
Relation
Generalized Variables
Electrical
Mechanical Translation
Mechanical Rotation
Hydraulic
Thermal