Dorst L., Fontijne D., Mann S. Geometric Algebra for Computer Science. An Object Oriented Approach to Geometry
Подождите немного. Документ загружается.


302 THE HOMOGENEOUS MODEL CHAPTER 11
11.8 LINEAR TRANSFORMATIONS: MOTIONS
AND MORE
We have made flats by explicit construction using points and directions, and incidence
operations among them. Once made, they can of course be moved around by transfor-
mations of the base space. If that space is Euclidean, we need to know how to perform the
Euclidean operations of translation and rotation to the flats. In fact, it is often a conve-
nient way to construct an offset flat by definining it first at the origin and then rotating
and moving it to the proper location. That is, for instance, how we will interpret cam-
era images in Section 12.2, first observing them in the camera fr ame, and then placing
the camera in its actual location to interpret the consequences in the world. Therefore we
need to know how to move flats around, both in direct and in dual form.
We can also perform linear transformations on the homogeneous representation space
R
n+1
and inter pret the result they have on the elements in the base space R
n
. T his is a
representational trick, taking the representation space perhaps somewhat more seriously
than we should have. Still, we find that in this way we can easily generate affine and pro-
jective transformations of the base space, and since we get them virtually for free in this
manner, we may as well make use of that.
All this is an extension of common practice in the point-based homogeneous coordinates
approach. As before, the algebra dictates how to extend the definitions from points to
flats as outermorphisms, and gives the general structural framework for these kinds of
transformations on general flats.
11.8.1 LINEAR TRANSFORMATIONS ON BLADES
We repeat from Chapter 4 that linear t ransformations on blades can be extended as out-
ermorphisms, and therefore they follow simply from specifying what they do to a vector.
If x → f[x] foravectorx,thenforabladeX we have
X → f[X].
This makes transformations of offset subspaces very simple, at least when we have them
in their direct representation. If the offset subspaces are characterized as duals, the trans-
formation law is somewhat more involved, and we have derived that in Section 4.3.5. If
x → f[x] foravectorx, then a blade X
∗
(dually representing a subspace blade X) trans-
forms by the transformation f
∗
defined as
X
∗
→ f
∗
[X
∗
] ≡ det (f)
f
−1
[X
∗
]. (11.12)
We remind you that for an orthogonal transformation, f
∗
= det(f)f= ±f (see Sec-
tion 4.3.4).
SECTION 11.8 LINEAR TRANSFORMATIONS: MOTIONS AND MORE 303
11.8.2 TRANSLATIONS
Translations act on locations, not on directions. The vector space model had no clear
way to distinguish those except by giving them separate data structures, and that makes
translations in that model clumsy. A vector used as a position vector p translates to
p + t, whereas a vector used as direction translates to a. A line or plane could be char-
acterizedbyasupportvectord, which is yet another type of vector. This t ype should
translate only along itself to remain the support vector of the translated result: d trans-
lates to d + (t · d)/d. So in the vector space model, there are three ty pes of vectors, each
with their own translation law. The homogeneous model cleans all this up and makes the
translations of flats automatic and universal.
The translation of a flat X = p ∧ A should of course simply move it to (p + t) ∧ A, a flat
with the same orientation but passing through the translated point p + t rather than p.
Since that adds t ∧ A to the original flat X, we need to retrieve the direction A from X.
This is achieved as A = e
−1
0
X, and the translation formula becomes
translation : X →
T
t
[X] = X + t ∧ (e
−1
0
X).
(11.13)
This is clearly a linear transformation of X, since it consists of linear operations. Structural
exercise 15 has you prove that its determinant equals 1. This implies that translations do
not affect areas and volumes in the homogeneous representation space
R
n+1
, and since
they also do not affect normalization (for e
−1
0
X = e
−1
0
T
t
[X]), they preserve areas and
volumes in the base space
R
n
as well.
Note that (11.13) works on flats of any grade, even for points with their scalar directions.
And it is consistent with our general representation: when we have made a flat at the origin
with direction A (represented by the blade e
0
A), then we can get the general form of an
offset flat by translating it over p to the point p:
T
p
[e
0
A] = e
0
A + p ∧ A = p ∧ A.
Equation (11.13) is defined for all blades, even though it was designed with finite sub-
spaces in mind. When we apply it to an improper subspace represented by the base space
blade X, we find:
T
t
[X] = X,
so that directions are translation-invariant.
We also need to know the consequence of a translation on a dually represented offset flat.
As we mentioned above, this is not the same as applying the original linear mapping
T
t
.
We denote the dual translation by
T
∗
t
, and compute it explicitly, by undualization of its

304 THE HOMOGENEOUS MODEL CHAPTER 11
argument, translation, and then redualization to get back to the dual representation. That
gives the dual translation formula:
T
∗
t
[X
∗
] ≡ (T
t
[X])
∗
=
X + t ∧ (e
−1
0
X)
∗
= X
∗
+ t(e
−1
0
∧ X
∗
)
= X
∗
− e
−1
0
∧ (tX
∗
).
(11.14)
You may verify that
T
∗
t
= T
−1
t
, in accordance with (11.12) for general linear transforma-
tions, since det(
T
t
) = 1.
We emphasize that the translation formulas apply to any blade (or dual blade), whatever
the grade. So there is no need for a separate translation operation for vectors, planes, and
so on. Yet there is a distinction between direct and dual representations, for
T
t
and T
∗
t
are
different functions of their arguments.
11.8.3 ROTATION AROUND THE ORIGIN
A Euclidean rotation around an axis through the origin characterized by a versor R should
affect the Euclidean positional and direction elements in the usual way: both should turn.
You might expect that we therefore need to decompose the flat into these components,
do the rotation, and recompose. However, there is a nice surpr ise: since R commutes with
e
0
, we can make it act on the whole blade using the outermorphism property:
X = (e
0
+ p) ∧ A →
R[X] = (e
0
+ R p R
−1
) ∧ (R A R
−1
)
= (R (e
0
+ p) R
−1
) ∧ (R A R
−1
)
= R ((e
0
+ p) ∧ A) R
−1
= RXR
−1
This is a ver y convenient form, much nicer than the translation formula (11.13).
Dual representations of flats can also be rotated. We can apply the procedure of undual-
ization of the argument, rotation, and redualization, but this results in the same rotation
formula, since the even versor R commutes with I
n+1
:
X
∗
→ (R (X
∗
I
n+1
) R
−1
) I
−1
n+1
= (R (X
∗
) R
−1
) I
n+1
I
−1
n+1
= R (X
∗
) R
−1
.
(Alternatively, you could have realized that for the orthogonal transformation
R, (11.12)
gives that
R
∗
= det(R)
R
−1
= R.) So a dually represented flat can be rotated using the
same formula as for a directly represented flat.
Here we see an advantage of oper ations that can be represented by even versors: they
transform elements universally, whether they are direct or dual. We will get back to this
issue; it is going to be an important feature of the conformal model.
SECTION 11.8 LINEAR TRANSFORMATIONS: MOTIONS AND MORE 305
11.8.4 GENERAL ROTATION
A general rotation around an axis at location t can be constructed in the usual manner by
translation over −t, rotating by R, and then putting the result back to t. This gives, after
some algebraic simplification,
X → RXR
−1
+ (t − R t R
−1
) ∧
e
−1
0
(RXR
−1
)
.
It is clear that only the component of t in the rotation plane contributes, since t−R t R
−1
=
2(tR)R
−1
. You could see this formula as the translation of the rotation operator R, and
in that light, rotors transform differently from either blades or dual blades.
If X is a dual representative, the general rotation formula is different:
X
∗
→ RX
∗
R
−1
− e
−1
0
∧
(t − R t R
−1
)(RX
∗
R
−1
)
.
This difference is caused by the asymmetry of the translation operator.
11.8.5 RIGID BODY MOTION
Finally, the most common way of characterizing a rigid motion is as a rotation R around
the origin, followed by a translation over t. On a direct blade this obviously leads to
X → RXR
−1
+ t ∧
e
−1
0
(RXR
−1
)
,
and on a dual blade to
X
∗
→ RX
∗
R
−1
− e
−1
0
∧
t(RX
∗
R
−1
)
.
Those are all the formulas you will need for rigid body motions on general objects.
As you apply them to the specific factors, you will see that the purely Euclidean direc-
tions A are translation-invariant:
A → R A R
−1
+ t ∧
e
−1
0
(R A R
−1
)
= R A R
−1
.
This is consistent with their interpretation as improper flats at infinity: they cannot be
translated to the finite part of space.
11.8.6 CONSTRUCTING ELEMENTS THROUGH MOTIONS
If in an application you need a specific flat and its representation, it is often convenient
to construct it first at the origin, and then orient it and move it to the proper location.
For instance, to make a line through p, we start with some standard line in the direction
e
1
through the origin. This is represented by the blade e
0
∧ e
1
. Now apply a rotor R to
orient the line to the desired orientation u. Since Re
0
R = e
0
and R e
1
R = u, the result on

306 THE HOMOGENEOUS MODEL CHAPTER 11
e
0
∧ e
1
is e
0
∧ u: only the direction has changed. Now apply a translation T
p
to bring the
line to the proper location so that
T
p
[e
0
] = p. The translation does not affect the direction
element, so that the result is the line p ∧u. Following these steps in terms of the operators
we just defined shows that the general form of a line is indeed e
0
∧ u + p ∧ u. The same
reasoning to move a flat at the origin with the correct orientation A to a desired location
gives e
0
∧ A + p ∧ A as its general form.
In this way of looking at the flats, you see that the first operation of orienting the flat
correctly acts only on the direction element, and is therefore actually defined in the vector
space model. The second step, translation, is the only one invoking the homogeneous
model, and it attaches itself only to the locational element e
0
, the point at the origin. In
this sense, the homogeneous model splits nicely:
T
p
[R[e
0
∧ A]] = T
p
[e
0
] ∧ R[A],
and this clearly shows the backward compatibility of the attitudinal elements with the
vector space model. We have not lost any of our capabilities to compute with directions,
and added the locational aspects, in a neat algebraic extension.
11.8.7 RIGID BODY MOTION OUTERMORPHISMS AS MATRICES
The linearit y of the rigid body motions in the homogeneous model permits their repre-
sentation as matrices. The form of the matrices differs for the various elements they act
on, because the basis on which the points, lines, and planes are represented vary widely.
We will give these matrices explicitly for the 3-D case, in terms of the specific homoge-
neous coordinates of the points, lines, and planes, in Section 12.1.
11.8.8 AFFINE TRANSFORMATIONS
An affine transformation is a special transformation of the points in the base space. It has
the property that it preserves colinearity of points on a line and the ratios of their distances
along that line. Any linear transformation of the vector space
R
n
has this property, and so
do translations.
That is the definition of affine transformations in
R
n
, and we need to find out what it
implies for their representation as mappings of
R
n+1
. As we have shown in Section 11.7.3,
the demand on meaningful ratios of distances of points along the same line implies that
their e
0
-coefficient is preserved under affine transformations. In formula, this means that
a point x transforms such that e
−1
0
· x is the same before the affine transformation A as
after. Therefore,
e
−1
0
· x = e
−1
0
· A[x] =
A[e
−1
0
] · x.
Since this should hold for any vector x, an affine transformation must satisfy
A[e
−1
0
] = e
−1
0
.

SECTION 11.8 LINEAR TRANSFORMATIONS: MOTIONS AND MORE 307
You may also read this as
A[e
0
] = e
0
, (11.15)
because e
−1
0
and e
0
only differ by a constant after you have chosen the metric.
It is easy to show that this implies that A preserves the
R
n
-subspace as being the part of
R
n+1
that is per pendicular to e
0
. We denote the pseudoscalar of R
n
as I
n
so that we can
wr ite the statement that no part of
R
n
has an e
0
component as
0 = e
−1
0
I
n
.
NowweapplyA to this statement and use the transformation property of the contraction
(4.13) to obtain
0 = A[e
−1
0
I
n
] =
A
−1
[e
−1
0
] A[I
n
] = e
−1
0
A[I
n
],
so that the transformed pseudoscalar indeed satisfies the same condition. Therefore the
affinely transformed elements are still in
R
n
. In geometrical terms, the preservation of R
n
means that an affine mapping changes directions into directions. More poetically, since the
directions are the elements at infinity, affine mappings preserve the heavenly sphere (not
point by point, but as a set).
We need to find a standard form for the most general linear transformation A onavector
x of
R
n+1
whose adjoint preserves e
0
. It uses the most general linear transformation f in
the subspace
R
n
, and it can add an arbitrary vector t to translate the result. On a unit
vector x it should therefore have the effect A[x] = e
0
+ f[x] + t.Ifweextendf to R
n+1
by defining f[e
0
] = e
0
, we can write this as A[x] = f[x] + t, but this is not yet a linear
transformation since it is not linear in the scale of x. The proper form must be
A[x] = f[x] + t ∧ (e
−1
0
· x),
where the factor on the t is the weight of the point x. When you try to extend this to
arbitrary blades as an outermorphism, you find that this is awkward (some mixed terms
appear), until you realize that e
−1
0
· x = e
−1
0
·f[x] (do you realize why?). Then the affine
transformation of a general multivector is
A[X] = f[X] + t ∧ (e
−1
0
f[X]).
(11.16)
Clearly the Euclidean motions are affine transformations (rotations only have the f-part,
for translations that is the identity). But more transformations can be defined; just tak-
ing out the translation component leaves the linear t ransformations in
R
n
, which can be
decomposed as rotations, translation, and nonuniform scaling.
The affine combination of points in (11.2) is now clearly an affine covariant, in the sense
that the affine combination of transformed points equals the transform of the affine com-
bination, as long as we use an affine transformation. Affine combinations of points can
308 THE HOMOGENEOUS MODEL CHAPTER 11
be combined using the construction operations such as outer product, meet, and join
to produce other affinely covariant constructions. This is the algebraic and geometrical
basis of curve interpolation methods such as de Casteljau’s algorithm.
11.8.9 PROJECTIVE TRANSFORMATIONS
Projective transformations are the general linear transformations in the space R
n+1
,
interpreted in the space
R
n
. Such general transformations can transform finite points to
infinite points (e.g., the rotation in
R
n+1
that turns e
0
into e
1
is among them).
Within the homogeneous model of geometric algebra, the projective transformations can
be extended as outermorphisms to act on all blades of
R
n+1
. In the base space R
n
, this
implies that we can not only transform points, but also offset subspaces such as lines and
planes. Therefore the point conic classically defined through as the locus of all points x
satisfying the equation
x · A[x] = 0,
can easily be extended to a general conic
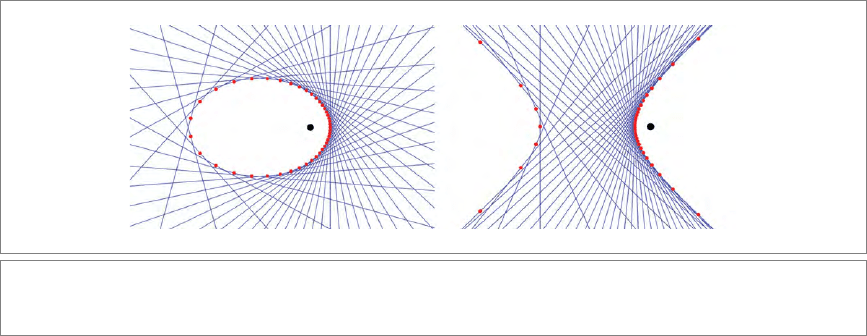
X A[X] = 0.
Figure 11.10 shows a line conic associated with a point conic in this manner.
Beyond this extended capability and its consequences, the geometric algebra of the homo-
geneous model so far has added little to the classical treatment of projective geometry.
Moreover, these capabilities are already present in the weaker Grassmann-Cayley algebra,
which is quite sufficient to do nonmetric projective geometry in practice (as [21] shows).
Geometric algebra makes the incorporation of Euclidean measures in those techniques
somewhat easier, but that is about the extent of its contribution to date.
Figure 11.10: In the homogeneous model, the equation XA[X] = 0 can be solved for flats of different grades. For points,
the solutions determine the familiar conics (in red); for lines, they give line conics (in blue).
SECTION 11.9 COORDINATE-FREE PARAMETERIZED CONSTRUCTIONS 309
On the other hand, geometric algebra changes our perspective on some aspects of
projective geometry. The principle of duality between points and lines in the plane, which
is classically presented as a unique feature of projective geometry, i s just a special case of
our usual dualization operation of division by the pseudoscalar. Not only is it applicable in
n-dimensions to elements of arbitrary grade, but it is a quantitative computational prin-
ciple rather than the merely qualitative substitutional symmetry of geometrical theorems
it often is in the classical t reatments. The full quantitative use of this principle is admit-
tedly a bit confused in the homogeneous model (as we show in Section 11.10), and that
has per haps led to an underestimation of its metric qualities. But dualization will come
into its own in the conformal model of Euclidean geometry. In that model, we will also
see how regular points in Euclidean geometry are actually point pairs (w ith one member
residing at infinity), and that the identification of opposite points in a spherical model of
projective geometry is again not uniquely projective, just a general fundamental principle
applied in a slightly different context (see Section 16.7.2).
Related to these issues is the suggestion that the homogeneous model may not be the
most natural representation of projective geometry. A geometric algebra representation
may be found in which conics can be represented as blades, and in which projective trans-
formations are rotors. Such a projective model would then be the natural way to embed
projective geometry within geometric algebra. It would be powerful: one should be able
to intersect two conics X and Y by their
meet Y
∗
X, for instance. The practical desir-
ability of similar computational techniques will be made apparent by our treatment of
the conformal model that provides this structure for Euclidean transformations. Having
such different geometries expressed in similar algebras will convey the common nature of
their fundamental structure.
To return to the homogeneous model, within the context of projective transformations
an affine transformation amounts to choosing a particular pseudoscalar subspace I
n
and
demanding that it be an eigenblade that transforms to become a multiple of itself; the
complement e
0
is then preserved by the adjoint of the transformation. So affine geometry
is projective geometry in a selected invariant base space of the homogeneous representa-
tion space.
11.9 COORDINATE-FREE PARAMETERIZED
CONSTRUCTIONS
The extension to blades and their operators that we achieved by considering the geometric
algebra of the homogeneous model can effectively be used in your programming. With
a bit of practice, you can design coordinate-free expressions for elements parameterized
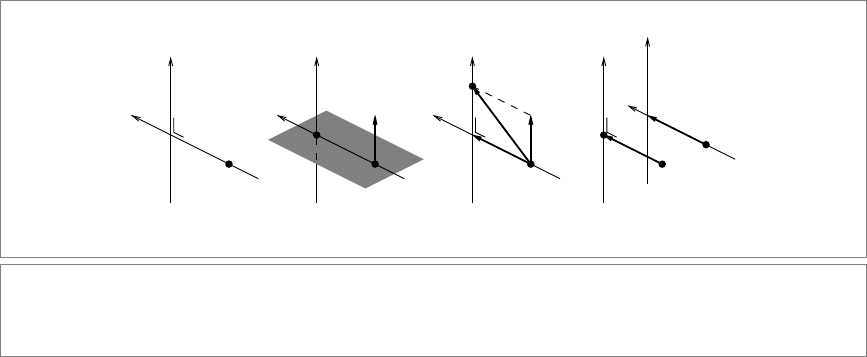
by other elements. For instance, in 3-D you might have a line L and a point p not on it,
and wish to find the line M through p that intersects L perpendicularly, as illustrated in
Figure 11.11(a).
310 THE HOMOGENEOUS MODEL CHAPTER 11
p
p
L⬘
L
L
L
L
n
n
e
0
c
(d)
M
q
(c)
c
p
p
M
M
(b)
(a)
Figure 11.11: (a) The problem: to find the line M through a point p perpendicular to another line L . (b) A solution involving
the plane through p orthogonal to L to find the support point c. (c) A solution using the rejection of the connection vector from
p to an arbitrary point q on the line. (d) Translating the situation back to the origin and solving it as a standard problem.
There are various routes to finding solution for such problems, some easier than others.
In the end you usually find an expression that you could have written down immediately
had you looked at the problem in a better way from the start. Practice helps, and these
are clearly skills that you should develop if you have to use the homogeneous model a
lot. However, we will soon replace the homogeneous model by the conformal model as
an operational model of Euclidean geometry, which requires similar skills within a richer
set of metrical tools, so check Chapter 13 first to see whether that model might not serve
your needs better.
Back to the problem of finding the line through p perpendicular to L. Let us denote the
direction of L by u (it can be found as u = e
−1
0
L), and the moment of L by U (it is
U = e
−1
0
(e
0
∧ L) ).
1. A number of thoughts arise about the relative geometrical situation of p, L, and
M, and it is interesting how they immediately invoke algebraic expressions in the
homogeneous model.
•
If we can find the unit point c on L that is closest to p, then M = p ∧ c.
•
Whatever M is, it has to be perpendicular to L, and therefore it should be in
the plane Π though p that is perpendicular to L; that plane is, dually, Π
∗
=
p(u ∧ e
−1
0
) = −u + (p · u) e
0
, using (11.6).
•
Having the plane Π, the point c is its meet with L,soc =Π
∗
L.
The combination of these observations provides the solution for the closest point
c as c =
− u + (p · u) e
−1
0
e
0
u + U
= e
0
− uU + (p · u) u.ItgivesM as
p ∧ c. Done.

SECTION 11.9 COORDINATE-FREE PARAMETERIZED CONSTRUCTIONS 311
But we can learn from rewriting things. First, p ∧c can be rewritten as p ∧ (c −p) =
p∧(c−p), and now c−p can be simplified to c−p = −uU−(p∧u) u = (U−p∧u) u.
You should begin to recognize that final expression. The moment U of L can be
constructed from a general point q on it as q ∧ u, and the 2-direction of M can
then apparently be written as ((q − p) ∧u) u, which is proportional to the rejection
((q−p)∧u)/u of the difference vector of any point on L with p, by the direction of L.
That is of course the support vector from p to L; now that we see it we recognize it
in the problem (see Figure 11.11(c)).
2. So in hindsight, our solution might have been: compute the support vector between
the unit point p and
and ar bitrary unit point q of L as the
rejection ((q − p) ∧u)/u,
and take the outer product with p to produce M. This is illustrated in
Figure 11.11(b). Using the original points q and p here saves extracting their
Euclidean parts, and makes it easier to express the result purely in terms of p and L.
We just use L = q ∧ u, and with u = e
−1
0
L obtain
M = p ∧
L − p ∧ (e
−1
0
L)
e
−1
0
L
.
Our computation in this way is even properly normalized: since p is a unit point,
M is weighted by the directed distance from p to L.Ifp is not a unit point, the
computation of the direction is incorrect, so a more robust expression would replace
p with p/( e
−1
0
· p) (at least in the direction part). Note that the normalization of L
cancels out, so L need not be nor malized.
3. Another way to find the location c intersection point c is to realize that c ∧ u = L
since it lies on L, and that it lies on the same plane with normal u as p does, so that
c · u = p · u (alternatively, you could remark that c − p should be perpendicular
to u, giving the same equation). Then we add those to obtain c u = L + p · u, and
right division by u produces the result c =
L + (p · u)
/u. The line M is then
M = p ∧c = p ∧ (c −p) = p ∧
L −(p ∧u)
/u, giving the same result as above. Note
that this computation involves the geometric product in a direct algebraic manner
rather than invoking the
meet. It is the purest solution, algebraically speaking.
4. We may suddenly realize that the original question was merely to ask for the line
along the support vector of L when seen from p. So we should get the answer if we
translate L and p back to the origin (by a translation over −p), compute the support
of that translated line L
(which is a standard formula from Table 11.3), and translate
back to p, as illustrated in Figure 11.11(d).
Translating L over −p means adding −p∧u to it so that the moment of the translated
line is U − p ∧ u, with U the moment of L. The support vector of L
is then is
d = (U − p ∧ u)/u, which is the direction of M with proper sign and weight, so
M = p ∧ d. Or, to finish the computation properly, we must translate the support
line e
0
∧ d of L
back to the point p; then e
0
becomes p and the base space element
d is translation-invariant, so it remains d.