Dorst L., Fontijne D., Mann S. Geometric Algebra for Computer Science. An Object Oriented Approach to Geometry
Подождите немного. Документ загружается.

322 THE HOMOGENEOUS MODEL CHAPTER 11
is equivalent in performance to:
g_normalizedPoints[idx] = g_normalizedPoints[g_dragPoint] + T;
but it is more generic since it conforms to the general pattern. Geometric algebra has
enough structure to permit automated generation of implementations. Having such a
code generator permits you to introduce small optimizations like the normalized points
very easily. We discuss these techniques in Part III.
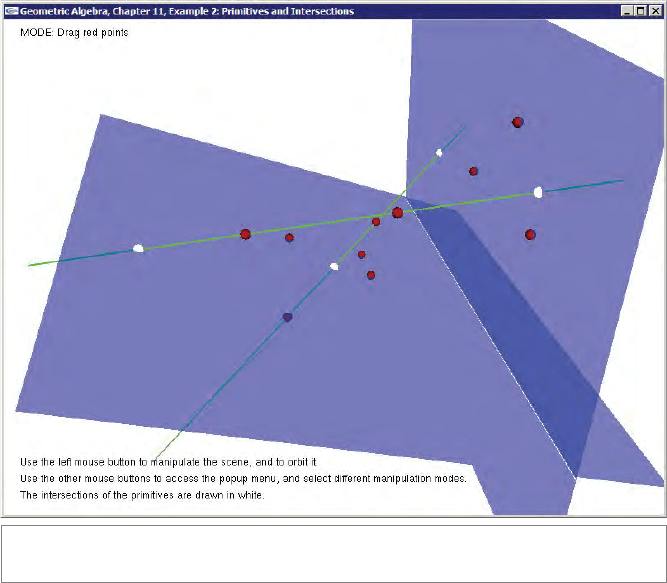
11.13.2 INTERSECTING PRIMITIVES
This example allows you
1. To drag points;
2. To create new points;
3. To combine points to form lines and planes.
The intersections of the lines and planes are computed and dr awn. Figure 11.14 shows a
screenshot.
The points are kept in a global array
g_points. Give two indices (pointIdx1 and
pointIdx2), a line is computed from two points as
line L = _line(g_points[pointIdx1] ^ g_points[pointIdx2]);
The code for computing a plane through three points is very similar:
plane P = _plane(g_points[pointIdx1] ^ g_points[pointIdx2] ^
g_points[pointIdx3]);
The intersections of the lines and planes are computed in a very generic fashion. In prin-
ciple, the code for computing the intersections spells out the
meet:
// compute ’pseudoscalar’ of the space spanned by P1 and P2
mv I = unit_e(join(P1, P2));
// compute P1* . P2
mv intersection = (P1 << inverse(I)) << P2;
Here, P1 and P2 are two primitives (lines or planes). P1 and P2 have been initialized such
that the grade of
P1 is lower than or equal to the grade of P2.
However, this basic code would make it very hard for the user to create degenerate
situations such as two identical lines, a plane and a line contained in it, or a plane con-
tained in a plane. Mouse manipulation will not succeed to bring such situations about.
That is why we use a trick to make the primitives snap to each other. We project
P1 onto
P2. If the projection of P1 is close enough to P1 itself, we set P1 equal to its projection:
mv projection = (P1 << inverse(P2)) << P2;
// check if projection of P1 onto P2 is ’close’ to P1
const float CLOSE = 0.02f;
if (_Float(norm_e(projection — P1)) < CLOSE) {
SECTION11.13 PROGRAMMING EXAMPLES AND EXERCISES 323
// yes:
P1 = projection;
}
Note that this construction will (unfortunately) not snap skew lines to make them
intersect.
Creating Points
The example also allows the user to create points by clicking at any p oint in the viewport.
The user expects a point to be created under the mouse cursor, but the distance from the
viewport is in principle unspecified; to keep the user interface simple, we assume that
using the distance of the previously dragged point is a good choice.
To implement this, we first create a new point at the required
distance from the camera:
// create a new point at ’distance’ from camera
normalizedPoint pt = _normalizedPoint(vectorAtDepth(distance,
mousePos) — e3 * distance);
Figure 11.14: Example 2 in action.
324 THE HOMOGENEOUS MODEL CHAPTER 11
The function vectorAtDepth() returns a the 2-D vector mousePos scaled such that the
projection (at
distance)isequalmousePos. Subtracting e3 * distance then gives the
required point. But this point is still in the camera (modelview) frame.
To transform the point to the global frame, we retrieve the OpenGL modelview matrix,
invert it, and apply it to the point as an outermorphism:
// retrieve modelview matrix from OpenGL:
float modelviewMatrix[16];
glGetFloatv(GL_MODELVIEW_MATRIX, modelviewMatrix);
// invert matrix
float inverseModelviewMatrix[16];
invert4x4Matrix(modelviewMatrix, inverseModelviewMatrix);
// use matrix to initialize an outermorphism; apply it to the point
omPoint M(inverseModelviewMatrix);
pt = apply_om(M, pt);
The point is then added to the global list of points. We will make more use of matrices
and outermorphisms in Sections 12.5.1 and 12.5.2.
11.13.3 DON’T ADD LINES
As described in Section 11.3.3, the sum of two homogeneous lines is another line only
when they have a factor in common. It then is the weighted average of the two lines.
Otherwise, their sum is not a blade, and hence not geometrically interpretable. The fol-
lowing example demonstrates this.
You can drag around the four points that span the lines. The example computes the two
lines and draws them. It also adds the lines, and tries to draw the result:
// compute the lines
line L1 = _line(pt[0] ^ pt[1]);
line L2 = _line(pt[2] ^ pt[3]);
line L1plusL2 = _line(L1 + L2);
// ...
draw(L1);
draw(L2);
// ...
draw(L1plusL2);
L1plusL2
will show up only when
•
L1 and L2 share a point;
•
L1 and L2 have the same direction.
To facilitate creating such situations, the example makes the points snap to each other
SECTION11.13 PROGRAMMING EXAMPLES AND EXERCISES 325
when they get within close range. The example also adjust the directions when the lines
are near-parallel, such that the lines become truly parallel.
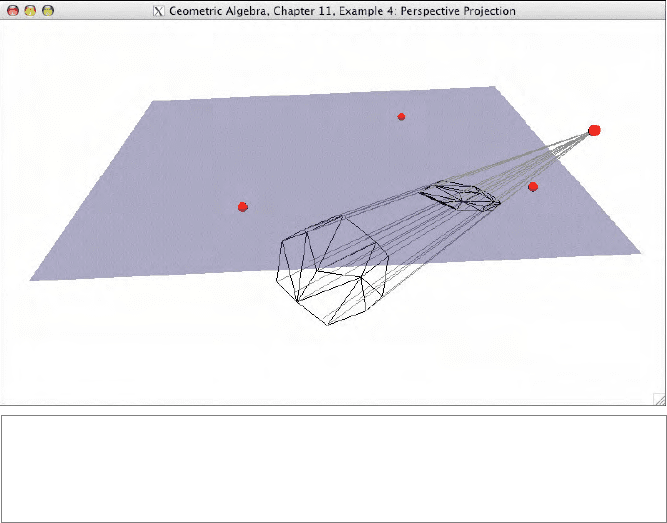
11.13.4 PERSPECTIVE PROJECTION
This example projects 3-D models onto an image plane, as shown in Figure 11.15. The
camera and the image plane are determined by four points:
normalizedPoint cameraPoint = g_points[CAMERA_PT_IDX];
plane imagePlane = _plane(
g_points[IMAGE_PLANE_PT_IDX + 0] ^
g_points[IMAGE_PLANE_PT_IDX + 1] ^
g_points[IMAGE_PLANE_PT_IDX + 2]
);
The points are stored in a global array g_points. They can be dragged around using the
mouse. The projection is perfor med by constructing the line
vertex ∧ cameraPoint
and intersecting it with the imagePlane:
Three red points span the imaging plane, and the fourth represents the camera.
Use the left mouse button to drag the red points, and to orbit the scene.
Use the other mouse buttons access the popup menu (to select a different model, and to toggle rays on/off).
Figure 11.15: Perspective projection (Example 4). The dodecahedron gets projected onto
the blue image plane. This is done by constructing rays (lines) between the vertices of the
dodecahedron and the camera (the red point on the right). The image plane is determined by
the other three points. The meet of rays and plane produces the intersection points.
326 THE HOMOGENEOUS MODEL CHAPTER 11
const normalizedPoint &vertex = g_vertices3D[g_polygons3D[i][j]];
// compute projected vertex
point pv = _point(dual(vertex ^ cameraPoint) << imagePlane);
We perform back-face culling (see also Sec tion 2.13.2), by comparing the orientation of
the image plane with the orientation of the plane spanned by the projected vertices:
// array PV contains the projected vertices
mv::Float ori = _Float((PV[0] ^ PV[1] ^ PV[2]) *
inverse (imagePlane));
if (ori > 0.0f) {
// draw the polygon
// ...
}
Note that when you reverse orientation of the image plane (by reversing the order of the
points that define it), you get the opposite definition of which faces are the back-faces.
In that case, you will see the backside of the model projected onto the plane.
(Disclaimer: It is of course faster to use a matri x representation of the projection outer-
morphism, but this example is intended as an enlightening exercise on an alternative geo-
metrical manner to produce the same result.)
Exercise 4a: Orthogonal Projection
Adjust the example to use orthogonal projection rather than perspective projection. Note
that such an orthogonal projection is fully specified by the image plane, so that the camera
position is irrelevant. The solution to this exercise is not simply to use the orthogonal pro-
jection formula (AB
−1
)B, due to the metric imperfections of the homogeneous model
discussed in Section 11.10.
12
APPLICATIONS OF THE
HOMOGENEOUS MODEL
The homogeneous model is well suited to applications in which incidences of offset flat
subspaces are central, but less so when metric properties are also important. In this, it
plays a role similar to Grassmann-Cayley algebra. This chapter gives details on its direct
use in applications.
In the first part, we discuss the coordinate representations of the homogeneous elements.
This naturally embeds the powerful Pl
¨
ucker coordinates for line computations, which
are seen to be are a natural extension of homogeneous point coordinates (using the outer
product). We show how you can master them and derive new application formulas simply.
Those coordinates for lines, as well as points and planes, permit compact formulation of
the affine transformations as matrices.
In the second part, we give an advanced application of the homogeneous model. It is well
suited to encode the projective geometry involved in the imaging of the world by one
or more pinhole cameras. The homogeneous model permits easy specification of how
observations in the various cameras are connected, which permits using observations by
one camera to guide the search for corresponding features in another camera. We treat
the fairly advanced subjects of stereo-vision based on point and line matches in 2 or 3
cameras.
Both subjects of this chapter are incidental to the main flow of the book, though the sec-
tion on Pl
¨
ucker coordinates prepares you for the implementation of geometric algebra in
Part III.
327
328 APPLICATIONS OF THE HOMOGENEOUS MODEL CHAPTER 12
12.1 HOMOGENEOUS PL
¨
UCKER COORDINATES IN 3-D
In the previous chapter, we saw how the homogeneous model permits direct and dual
representation of flats. This extends the commonly used homogeneous coordinates for
points and hyperplanes used throughout computer graphics and robotics literature. In
some more specialized texts, you may also find a representation of lines by Pl
¨
ucker coor-
dinates. These are coordinates tailored to the description of lines, and they permit direct
computation w ith lines as basic elements. That provides for faster and simpler code than if
you described lines by a direction vector and a position vector, or as two plane equations,
or by two points. Repeated attempts have been made to introduce them into mainstream
computer graphics, where line computations are obviously impor tant, but with limited
success.
It is clear why Pl
¨
ucker coordinates are less well known than they deser ve to be. In the usual
texts, they are presented as a strange mathematical trick, not clearly related to the homo-
geneous coordinates. They require 6-D vectors and corresponding matrices, which appear
extraneous to the usual 4-D data structures in homogeneous coordinate software. So most
people continue to encode lines as composite elements in a data structure consisting of
two vectors. This denies lines the status of being convenient elements of computation, and
that in turn affects solutions to practical problems; if there is a natural way of describing
and solving some problem using lines, it is less likely to be found. An example is visual
self-localization by a robot in an office environment; a ty pical solution looks to match
point features, neglecting the numerous straig ht lines usually present in such an environ-
ment. Reducing every thing to point-based or plane-based computations may be subopti-
mal and neglects the perfectly useful and stably measurable str aight edges. But to actually
use them in your estimation processes, you need the ability to compute with them.
In this chapter, we show how to look at the Pl
¨
ucker coordinates in a manner that makes
them natural and convenient to use. There are no new concepts here; this is an application
of the structure of the previous chapter, but is good to relate the algebra to the specific
coordinate techniques that the proponents of Pl
¨
ucker coordinates (such as [57]) suggest.
12.1.1 LINE REPRESENTATION
Let us again look at the representation of lines, and focus specifically on a 3-D base space.
The line representation p ∧ q of (11.3) as
p ∧ q = e
0
∧ (q − p) + p ∧ q (12.1)
involves six coordinates: three for the 2-blade e
0
∧ (q − p) and three for the 2-blade p ∧ q.
There is one dependency relationship (since e
0
∧ (q − p) ∧ (p ∧ q) = 0), and that reduces
the degrees of freedom of the line to five. Geometrically, you can interpret the first term
of (12.1) as the direction vector and the second term as the moment. We have denoted
those in Figure 12.1. This figure cannot show the fourth dimension e
0
; with that extra

SECTION 12.1 HOMOGENEOUS PL
¨
UCKER COORDINATES IN 3-D 329
q
−
p
p
q
p ∧ q
p × q
Figure 12.1: Pl
¨
ucker coordinates of a line in 3-D.
dimension it should look more like Figure 11.2(a), which is its lower-dimensional version
for lines in 2-D.
We can group the six coordinates of a line in 3-D as two vectors of three components, by
employing the cross product:
p ∧ q = e
0
∧ (q − p) + p ∧ q = (p − q) e
0
+ (p × q) I
3
.
(12.2)
We recognize (minus) the direction vector and the dual of the moment 2-blade (which
is the properly weighted normal vector of the plane through the line and the origin).
Together, these form the Pl
¨
ucker coordinates of the 3-D line, denoted by
−{p − q; p × q}
(12.3)
(see [57]). Classically, these are often treated as six slots for storing numbers, without
much algebraic structure, and manipulations with these numbers may seem rather arbi-
trary, especially when combined with the homogeneous coordinate representations of
points and planes. Table 12.1 gives some examples. The operations are simple and fast
and that explains the interest of the Pl
¨
ucker coordinates, but the structure between these
“magic formulas” is lost, so that implementations are hard to extend to cases not covered
in such tables (or to higher dimensions). The usual nonalgebraic encoding of the type of
element represented by different kinds of brackets around the coordinates does little to
clarify the str ucture of the table.
330 APPLICATIONS OF THE HOMOGENEOUS MODEL CHAPTER 12
Table12.1: Common Pl
¨
ucker coordinate computations with a line {a, m}, a plane [n, δ], and
a point ( p :1). The type of bracket denotes the type of object nonalgebraically. (Expanded from
[57].) Note that a is minus the usual direction vector.
(p :1) Point at location p
[n, − δ] Plane with normal n and offset δ
n · p − δ Distance from point to plane
{a, m} = {p − q, p × q} Line through two points, from Q to P
(m·m )/(a·a) Squared distance of line to origin
(m × a : a · a) Point on line closest to origin
[a × m : m · m] Plane through line, perpendicular to origin plane
(m × n + δ a : a · n) Point in line and plane
[a × p − m : m · p] Plane through line and point
[a × n : m · n] Plane through line, additional direction n
In the geometric algebra point of v iew, we see that the six numbers are coefficients on a
specific basis, in (12.2) demonstr ated by the extra symbols e
0
and I
3
. This gives the full
algebraic meaning to the Pl
¨
ucker coordinates, and endows them automatically with rela-
tionships to the other elements through their membership in geometric algebra. Their
actual construction in (12.2) is a clear instance of this: by taking the outer product of
two homogeneous points, we get the line representation, providing the straightforward
connection between point coordinates and line coordinates through the standard oper-
ation of outer product. The same standard operation should connect the table entries
for point, line, and plane through line and point. This obvious geometrical fact is not
at all clear from the corresponding entries in Table 12.1. Only by translating the bracket
notation back into its actual geometric basis and applying the standard constructions of
geometric algebra can we understand and extend such tables.
12.1.2 THE ELEMENTS IN COORDINATE FORM
In the homogeneous model of 3-D space, the representation of the quantities in terms of
coordinates is easily computed. We give a complete inventory of the repertoire of geomet-
ric elements in the homogeneous model. We study the coordinate representation of the
offset flat subspaces of various grades (points, lines, and planes) in both their direct and
in their dual representations.
1. Point. We have seen that the 1-D homogeneous subspace representing a 0-D point
in the homogeneous model is of the form e
0
+ p (or a multiple). In a homoge-
neous model of 3-space with basis {e
1
, e
2
, e
3
, e
0
}, it therefore has the coordinates
SECTION 12.1 HOMOGENEOUS PL
¨
UCKER COORDINATES IN 3-D 331
(p
1
, p
2
, p
3
, 1) (or a multiple), with (p
1
, p
2
, p
3
) the Euclidean coordinates of its
position vector. In Table 12.1 this is w ritten as (p :1), following [57].
2. Hyperplane. If we have a plane characterized as all points x such that x · n = δ,
this can be written as (e
0
+ x ) · (−n + δe
−1
0
) = 0,soasx · (−n + δe
−1
0
) = 0.
Therefore −n + δe
−1
0
(or any multiple of it) is the dual of the blade representing
the hyperplane. It is represented on a basis {e
1
, e
2
, e
3
, e
−1
0
}, which appears different
from the basis for points until you realize that e
−1
0
= ±e
0
, depending on the metric
chosen. Therefore the bases are the same, and you cannot tell these elements apart
as vectors.
If −n + δe
−1
0
is the dual of a blade, then the blade itself must be
(−n + δe
−1
0
)(e
0
I
3
) = −ne
0
I
3
+ δI
3
(where we take the undualization in the (n + 1)-dimensional homogeneous
model, so relative to the pseudoscalar e
0
I
3
). This has the Pl
¨
ucker coefficients
[n
1
, n
2
, n
3
: −δ] used in Table 12.1, but on the trivector basis
{e
2
e
3
e
0
, e
3
e
1
e
0
, e
1
e
2
e
0
, − e
1
e
2
e
3
},
which is clearly different from the vector basis for points. In standard literature
on Pl
¨
ucker coordinates, this difference in basis is denoted nonalgebraically by
square brackets: [n : −δ]. Others consider planes as row vectors, and points as
column vectors, so then their brackets could be interpreted as specifying this
difference.
If you want a consistent representation of the direct and dual-oriented planes, you
should be very explicit in your choice of basis. The dual plane also has a represen-
tation [n : −δ], but the basis is {−e
1
, − e
2
, − e
3
, − e
−1
0
= ∓e
0
} (the sign of the last
element related to the sign in e
−1
0
= ±e
0
). Such headaches are the consequences of
splitting up a single geometr ic element (the dual plane) in its coordinates and basis,
each of which separately have no objective geometric meaning.
3. Lines. We have seen above in (12.2) that a line is represented by minus the usual
direction vector a = p − q andamomentvectorm = p × q = −p × a as
L = a e
0
+ mI
3
(12.4)
The six coefficients {a
1
, a
2
, a
3
, m
1
, m
2
, m
3
} of this line are on the bivector basis
{e
1
e
0
, e
2
e
0
, e
3
e
0
, e
2
e
3
, e
3
e
1
, e
1
e
2
}.
(12.5)
In Table 12.1, we follow [57] in using curly br ackets for this data type. In derivations
with lines, we obviously need to revert to the fully expressed form.