Dorst L., Fontijne D., Mann S. Geometric Algebra for Computer Science. An Object Oriented Approach to Geometry
Подождите немного. Документ загружается.

312 THE HOMOGENEOUS MODEL CHAPTER 11
Whenever you solve a problem that is important to a computation, try to derive and inter-
pret the result in several ways. Some of those may integrate better with other aspects
of the larger problem and allow for a more efficient combined total solution. Make
sure you use the opportunities that the homogeneous model offers to give your results
quantitative properties with useful signs and weights; related to that, check that the for-
mulas you derive are robust to normalization assumptions.
11.10 METRIC PRODUCTS IN THE HOMOGENEOUS
MODEL
You may have noticed that we have been rather careful in our choice of algebr aic
operations. In fact, there is hardly more than the outer product, duality, the
meet, and
outermorphisms involved on the elements of the representation space
R
n+1
.Whenyou
realize that mathematicians can introduce duality in a nonmetric way (by employing
k-forms), you see that these are all nonmetric operations. The
meet is simply the dual
of the outer product of duals, and we have seen in Chapter 5 that its outcome does not
depend on a metric.
When we did use the purely metric products of contraction or the geometric product, it
was either on the subspace
R
n
or on elements with the same flat in R
n+1
,suchaswhen
computing the cross ratio. (The probing of a dual representation by the inner product
with a point can also be written nonmetrically using a 1-form, so it does not count as
metric usage).
Our nonmetrical use of the homogeneous model
R
n+1
is in fact most clearly demon-
strated by our refusal to even choose its metric: we purposely left the option of choosing
e
2
0
= 1 or e
2
0
= −1. That did not return to haunt us in our results so far, which must
therefore have b een nonmetrical.
The main problem with using the metric of
R
n+1
is that you cannot use it directly to do
Euclidean geometry, for it has no clear Euclidean interpretation. We address this funda-
mental shortcoming because it helps refine what the properties of a model of a geometry
should be. That understanding prepares us for the conformal model that fixes the awk-
wardness of the homogeneous model in this respect.
11.10.1 NON-EUCLIDEAN RESULTS
We would demand of a representation for Euclidean geometry that it is structure-
preserving under translations (i.e., tr anslation-covariant). This means that a result that
holds in one location can be translated to another location and still hold. (We also demand
rotation covariance, but the homogeneous model inherits that property from the vector
space model, so we need not discuss it.) Translation covariance should imply that we can
take another point e
0
= e
0
+ t as our new origin instead of e
0
, and all geometrical results

SECTION 11.10 METRIC PRODUCTS IN THE HOMOGENEOUS MODEL 313
relative to this new origin should be similar. Yet this change of origin from e
0
to e
0
changes
the metric of
R
n+1
, for
(e
0
)
2
= e
2
0
+ t
2
,
and whether we choose e
2
0
=+1 or e
2
0
= −1, the square of e
0
is going to be different.
This deficiency also shows itself in the geometric product, and propagates to versors.
Things get structurally awkward with inverses, for the inverse of the representation is not
the representation of the inverse. This statement is
x
−1
= (e
0
+ x)
−1
=
e
0
+ x
e
2
0
+ x
2
= e
0
+ x/x
2
= e
0
+ x
−1
,
and you see how different the results are. (An element that does frequently occur when
computing with inverses is e
−1
0
− x
−1
. It has the property (e
−1
0
− x
−1
) · (e
0
+ x) = 0
and is therefore some standard perpendicular direction to the vector x, useful in duality
computations.)
The lack of well-behaved inverses haunts the use of the geometric product in versor con-
structions. For instance, the reflection of one point into another seems proper enough at
the origin:
e
0
pe
−1
0
= e
0
(e
0
+ p) e
−1
0
= e
0
− p.
That is a reasonable geometric outcome, a point reflection has clearly taken place. But
when we use another point as reflector, something strange happens. Let us study that
around the origin as well:
qe
0
q
−1
= (e
0
+ q) e
0
(e
0
+ q)/(e
2
0
+ q
2
)
=
e
0
(e
2
0
− q
2
) + 2 e
2
0
q
/(e
2
0
+ q
2
).
This is a weighted point at location
2
e
2
0
e
2
0
− q
2
q.
Not only is this strangely nonlinear, but it depends on the metric of the representation
space since it contains e
2
0
. We saw above that this metric depends on where the origin
is. This well-defined reflection construction in
R
n+1
may be useful for something (it is
related to stereographic projection), but it is not meaningful for the Euclidean geometry
of
R
n
.
These insights are not new. In the classical use of homogeneous coordinates, you should
have learned to be careful with the inner product. The inner product of two vector repre-
sentatives x and y is
x · y = e
2
0
+ x · y,
and only the second term has objective meaning for the computation of angles and lengths
in the Euclidean space you are modeling. But that quantity might as well have been com-
puted using only the vector space model. On the other hand, the inner product does have
314 THE HOMOGENEOUS MODEL CHAPTER 11
a sensible meaning when defining a plane in a dual manner by π = n − e
−1
0
δ,aswe
have seen:
x · π = 0 ⇐⇒ x · n = δ.
This is essentially a nonmetric use of the inner product, since it is done between a direct
element and a dual element: 0 = x · π = x · Π
∗
= (x ∧ Π)
∗
. It is all a bit confusing
and less tidy than you might have hoped from geometric algebra. We emphasize that the
problem is not geometric algebra itself, but the homogeneous model and our desire to
use it for Euclidean geometry. It will be replaced by a much better model for that purpose
in Chapter 13.
11.10.2 NONMETRIC ORTHOGONAL PROJECTION
Despite its metr ic shortcomings, we can learn interesting geometry from the structure we
have in the homogeneous model. As an example, let us look at orthogonal projection. In
Part I we derived that the projection of a blade X onto a blade A is represented as
P
A
[X] = (XA)A
−1
.
The result is in A in a manner that in a Euclidean space is “orthogonally below X.” You
would expect this to be a metric construction.
The algebraic operation can be performed in the homogeneous model as well, for inverses
are well-defined. What can this orthogonal projection mean in a space
R
n+1
without
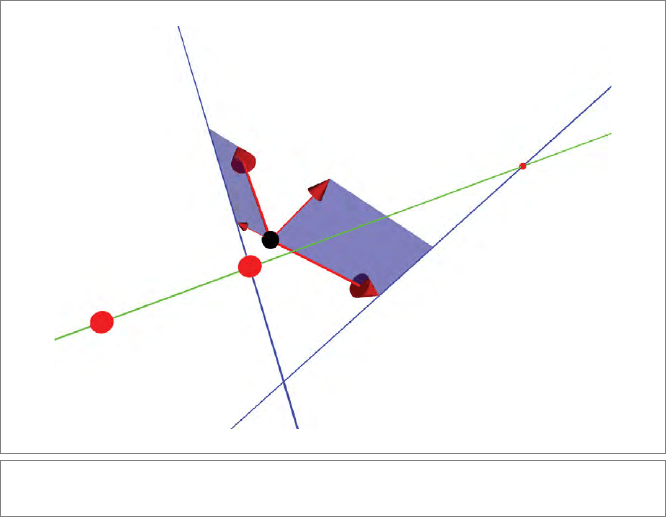
a clear metric? The homogeneous projection of a p oint x onto a line L is depicted in
Figure 11.12. The result is a point on the line L with an unexpected relationship to its
dual: the line x ∧ P
L
[x] intersects the dual line L
−∗
.
It turns out that we can rewrite the projection as a
meet, not only in the homogeneous
model, but in general. Leaving out the inverse of A to show the structure of the derivation
more clearly, and assuming X and A in general position, we simply rewrite:
A ∩ (X ∧ A
−∗
) = (X ∧ A
−∗
)
∗
A = (XA)A.
(11.17)
The orthogonal projection is therefore less metric than we might have assumed, though
it does involve an (inverse) dual.
To explain Figure 11.12, the projection in 3-D of a point x on a unit line L is obtained by
making the dual L
−∗
. This is also a line, and writing L as L = (e
0
+d) u = e
0
u+M,wefind
L
−∗
= −e
2
0
(e
−1
0
M
夹
− u
夹
). This has 1/d as its support vector, and runs perpendicular to
the plane through L and the origin; both properties are of course very much dependent on
the location of the origin. Then the projection is the point of L obtained by intersection
with the plane x ∧ L
−∗
. That also implies that the line through x and its projection cuts
SECTION 11.11 FURTHER READING 315
x
L
(x
⎦
L)/L
d
u
L
−
*
Figure 11.12: The orthogonal projection in the homogeneous model (see text).
L
−∗
. T his situation is depicted in Figure 11.12. Euclidean geometry it ain’t, but it could
be useful in projective geometry.
11.11 FURTHER READING
A good reference for getting an intuition for oriented subspaces in the homogeneous
model is Stolfi’s classical book [60]. His hand-drawn visualizations are justly famous, and
they give several ways of looking at this “raylike” representation of points in one more
dimension.
He uses a kind of Grassmann algebra to encode the basic operations between flats, but
grounded in
meet and join rather than the outer product and the contraction. That is
more limiting for use in Euclidean situations, so that his treatment is mostly nonmetric,
not even reverting to the vector space model where this would have been possible. This
is typical of most uses of the homogeneous model in projective imaging as well. Some
references for that field are given at the end of the next chapter.

316 THE HOMOGENEOUS MODEL CHAPTER 11
11.12 EXERCISES
11.12.1 DRILLS
Compute the 2-blades corresponding to the lines given by the data below. Which of the
lines are the same, considered as weighted oriented elements of geometry, and which are
the same as offset subspaces?
1. Two points at locations e
1
and e
2
.
2. A point at location e
1
and a direction (e
2
− e
1
).
3. A point at location e
2
and a direction (e
2
− e
1
).
4. Two points with locations 2(e
2
− e
1
) and 3(e
2
− e
1
).
5. A point at location e
1
and a direction 2(e
2
− e
1
).
6. A unit point at location e
1
and a point with weight 2 at location e
2
.
11.12.2 STRUCTURAL EXERCISES
1. Let an orthonormal coordinate system {e
i
}
3
i=1
be given in 3-D Euclidean space.
Compute the support vector of the line with direction u = e
1
+ 2e
2
− e
3
, through
the point p = e
1
− 3e
2
. What is the distance of the line to the origin?
2. Convert the line of the previous exercise into a parametric equation x = p + λ u;
express λ as a function of x forapointx on the line. Interpret geometrically.
3. Show that the support vector d of a k-flat is the rejection of the position vector of
an arbitrary point p on it by the k-direction A.
4. Show that the weight of the plane p ∧ q ∧ r is twice the area of the triangle
spanned by the normalized points p, q, and r. Give the corresponding statement for
a general (k − 1)-dimensional flat constructed from k normalized points (see also
Section 2.8.3).
5. Three points a, b, c form a plane, and these points can be used to address any other
point x in that plane as a linear combination:
x = α a + β b + γc.
Using normalized points, one can do this with an affine combination. The resulting
scalars α, β, γ are called barycentric coordinates (literally, “weight-based”). Compute
α, β, γ in terms of the points a, b, c, and express the result using the relative vectors
a = a
− c, b = b − c and x = x − c.
This
should give you:
α =
x ∧ b
a ∧ b
, β =
x ∧ a
b ∧ a
, γ = 1 −
x ∧ (b − a)
a ∧ b
. (11.18)
Interpret the result geometrically in terms of areas in the plane (most easily seen
when x is inside the triangle formed by a, b, and c). What are the barycentric coor-
dinates of the center of gravity?
SECTION11.12 EXERCISES 317
These bar ycentric coordinates can be used to interpolate any scalar property given
at each of the vertices of a triangle to an intermediate
x
value at x, through:
x
= α
a
+ β
b
+ γ
c
(11.19)
This equation will be used in the ray tracer of Chapter 23.
6. The inverse of the support vector of a plane spanned by three points at locations p,
q, and r is equal to the sum of the reciprocal vectors corresponding to these three
vectors in their own frame {p,q,r}. Show this using (11.4) and (3.31).
7. In the paramet ric equation for an offset flat (11.5), the vector x determines the val-
ues of the λ
i
uniquely. Compute a formula for λ
i
. (Hint: Eliminate the other λ
j
, with
j = i, by suitably chosen outer products with a
j
vectors. Alternatively, use the idea
of a reciprocal basis from Section 3.8.)
8. The base space
R
n
is a subspace of R
n+1
, and it has a subalgebra of the geometric
algebra of that full space. Hestenes [27] has devised the projective split relativetoa
fixed element to express a subalgebra of a space in standard form. Using e
0
and e
−1
0
(the elements of R
n+1
that are not also in R
n
), a direct blade of R
n+1
can be split by
his method. This leads to a natural factorization of the blade. The following does
this, and results in the familiar parts that we recognize as support and direction (see
also Table 11.3).
X = e
0
e
−1
0
X
= e
0
∧ (e
−1
0
X) + e
0
(e
−1
0
∧ X)
= e
0
(e
−1
0
X) +
e
−1
0
(e
0
∧ X)
e
−1
0
X
(e
−1
0
X)ife
−1
0
X = 0
=
e
0
+
e
−1
0
(e
0
∧ X)
e
−1
0
X
(e
−1
0
X)ife
−1
0
X = 0
Perform a similar split for the dual blade to derive the corresponding column of
Table 11.3.
9. Construct the dual representation of the midplane between two points p and q.
10. We suggested in Section 11.7 that the
meet of two points p and q on a line L = d u
is proportional to their distance. Explore precisely how, so give p ∩q quantitatively.
11. The
meet of two skew lines p ∧ u and q ∧ v can be computed as M
∗
L. Verify the
steps in the following derivation of (11.9) using this formula.
(p ∧ u) ∩ (q ∧ v) =
(q ∧ v)(I
−1
3
∧ e
0
−1
)
(p ∧ u)
=
q(vI
−1
3
∧ e
0
−1
)
(p ∧ u)
=
q(vI
−1
3
) ∧ e
0
−1
+ (vI
−1
3
)
(p ∧ u)
=
q(vI
−1
3
)
u + (v I
−1
3
)(p ∧ u)

318 THE HOMOGENEOUS MODEL CHAPTER 11
= u
q(vI
−1
3
)
+ (p ∧ u)(vI
−1
3
)
= (u ∧ q ∧ v)I
−1
3
+ (p ∧ u ∧ v)I
−1
3
=
(p − q) ∧ u ∧ v
I
−1
3
12. Take two lines L
1
= p
1
∧a
1
and L
2
= p
2
∧a
2
that satisfy a
1
∧a
2
= 0 but (p
1
∧a
1
) ∧
(p
2
∧ a
2
) = 0. These lines are not skew, but intersect in some plane in space. Their
join is now proportional to the common plane a
2
∧ p
2
∧ a
1
= p
2
∧ a
1
∧ a
2
. Let the
unit blade representing this be I. Show that their
meet is now:
J = I (proportional to p
2
∧ a
1
∧ a
2
)
(11.20)
M = e
0
(a
1
∧ a
2
)
+ a
1
(p
2
∧ a
2
)
− a
2
(p
1
∧ a
1
)
+
1
2
((p
1
+ p
2
) ∧ a
1
∧ a
2
)/I
2
,
with duality relative to I
2
, the unit blade of a
1
∧ a
2
(i.e., as XI
−1
2
whether or not
X is in I
2
). Interpret the result, and show its geometric meaning by relating it to
the special case of (11.8) (where the common plane passed through the origin). In
that case, the inner products could be replaced by geometric products, and you may
recognize Cramer’s rule (since the ratios of areas in the same plane are ratios of 2-D
determinants). This {a
1
,a
2
}-basis is a natural coordinate system for this problem in
the Euclidean plane. In 3-D, this is extended by the last term, which is perpendicular
to the common plane (for it is in fact a rejection).
The proportionality factor α = (a
1
∧ a
2
)
of e
0
in the expression for M is the weig ht
of the point at d. It indicates the numerical stability of the intersection, and may be
used as a measure of the significance of the interpretation as an intersection point.
13. In Section 11.7.2, we stated, “In a plane with counterclockwise orientation, the pos-
itive side of the line is on your left when you look along its direction.” Convince
yourself that this statement gives the same positive side independent of whether you
look at the plane from above or below, so that it is a truly geometrically invariant
definition. That is good, for it would be useless otherwise.
14. Translate the representational space e
0
I
n
, both in its direct representation and in its
dual representation. Do the algebraic results match your geometric expectation?
15. Show explicitly that the determinants of the translation formulas (11.13) and
(11.14) for a flat and for a dual flat both equal 1.
16. Showexplicitlythattranslationisan outermorphism; thatis,
T
t
[X]∧T
t
[Y] = T
t
[X ∧Y].
(Hint: You will find that this holds because of the sign changes in the dist ributive
formula for the contraction (3.10).)
17. There is a way to patch up the homogeneous model so that translation becomes
representable in a versor-like form, and you may find this used in the somewhat
older literature (such as [4]). It uses a different metric in which e
0
· e
0
= 0, and
represents a point at location x as x = 1 + xI
4
,whereI
4
= e
0
I
3
is the pseudoscalar
of the homogeneous representation space. Show that in this approach, the element
T = (1 + tI
4
/2) acts more or less as a translation versor on points, in the sense that
T x T is the translated point (note the absence of the reversion!).
SECTION11.12 EXERCISES 319
However, the representation of the higher-grade objects (such as lines and planes)
in such a model is ad hoc, in that various objects are not related to each other by an
outer product-like spanning operation, or a meet-like product for intersection.
Work out some cases and show that the versor form of the translation is not
perfect: some objects should be translated as TX
T, others as TXT, whereas one
would have hoped that such fundamental operations would be independent of
their argument.
Since the invention of the conformal model of Chapter 13 (which fixes all these
defects by using null vectors in a different manner), this motor algebra has fallen
into disuse, and we mention it here only for completeness.
18. Setting the cross ratio defined in (11.11) to λ, show that by permutations of the
points p, q, r, s you can obtain any of λ, 1/λ, (1 − λ), (1 − 1/λ), 1/(1 − λ) or
1/(1 − 1/λ)). These are permutation symmetries that you should take into account
when checking the similar situation of four unlabeled points (or lines) before and
after projective transformations. You can make a symmetrical function of them all
as a test for equality of situations: (λ
2
− λ + 1)
3
/(λ(λ − 1))
2
; see [55].
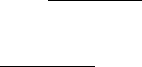
19. You are to draw a sequence of equidistant telegraph poles along a st raight road in
a picture showing the landscape seen in a bird’s eye view, with the horizon 6 cm
from the first pole and the separation between first and second pole 1 cm (see
Figure 11.13). Compute where the third pole should be. Extend this to comput-
ing the location of the kth pole. (Hint: Compute the cross ratio of the first two poles
to the point at infinity in a “straight” photograph. Then realize that the cross ratio
is a projective invariant.)
20. In the homogeneous coordinate approach, an affine transfor mation A is repre-
sented by a matrix acting on the homogeneous coordinate representation of a vector
6 cm
1 cm
Figure 11.13: The beginning of a line of equidistant telegraph poles. Structural exercise
19 asks you to draw the rest.
320 THE HOMOGENEOUS MODEL CHAPTER 11
[[ x
1
,x
2
,x
3
,1]]
T
. Interpret the defining condition A[e
0
] = e
0
of (11.15) in terms of a
property of such an affine matrix. Confirm your answer in Table 12.2.
21. Redo some of the orthogonal projection examples in the vector space model of a
3-D Euclidean space using the
meet interpretation of (11.17).
11.13 PROGRAMMING EXAMPLES AND EXERCISES
In the GA sandbox source code package, the implementation of the homogeneous model
of 3-D Euclidean space is called
h3ga. The basis vectors are e1, e2, e3, and e0. The metric
is Euclidean (i.e., e
1
· e
1
= e
2
· e
2
= e
3
· e
3
= e
0
· e
0
= 1). Various specialized multi-
vector types of blades are available, as dictated by our interpretation of the algebra (see
Table 11.4).
Note in this table that
bivector and lineAtInfinity are basically the same ty pes; only
their names differ.
Gaigen 2 has no problem with this.
An outermorphism class (
om) is also available. The specialized outermorphism class
omPoint can be applied to points only; it is the equivalent of a classic 4 × 4 homoge-
neous matrix. This is demonstrated in Section 12.5.1.
11.13.1 WORKING WITH POINTS
Our first foray into programming with the homogeneous model is an experiment with
drawing and translating points. Two types of points are provided in
h3ga: the point class
and the
normalizedPoint class. The e0 coordinate of a normalizedPoint is always 1,so
only normalized points can be stored in it.
normalizedPoint variables do not store their
Table 11.4: Specialized multivector types in the h3ga.
Name Sum of Basis Blades
vector e1, e2, e3
point e1, e2, e3, e0
normalizedPoint e1, e2, e3, e0=1
line e1∧e2, e2∧e3, e3∧e1, e1∧e0, e2∧e0, e3∧e0
lineAtInfinity e1∧e2, e2∧e3, e3∧e1
bivector e1∧e2, e2∧e3, e3∧e1
plane e1∧e2∧e3, e1∧e2∧e0, e2∧e3∧e0, e3∧e1∧e0
planeAtInfinity e1∧e2∧e3
rotor scalar, e1∧e2, e2∧e3, e3∧e1

SECTION11.13 PROGRAMMING EXAMPLES AND EXERCISES 321
e0 coordinate; this saves one coordinate and is also more efficient during computations.
So a
point has 4 coordinates, a normalizedPoint only 3.
Since OpenGL is internally based on homogeneous coordinates, the homogeneous model
is in many aspects a perfect match for it. Accordingly, both types of points can easily be
used as vertices in OpenGL, as shown below.
The example code draws two triangles. You can manipulate the vertices of the triangles
with the mouse. One triangle is made up from
points, the other from normalized-
Points
. The code to draw the t riangles with points is
glBegin(GL_LINE_LOOP);
for (int i = 0; i < NB_POINTS; i++) {
const point &P = g_points[i];
glVertex4fv(P.getC(point_e1_e2_e3_e0));
// or:
// glVertex4f(P.e1(), P.e2(), P.e3(), P.e0());
}
glEnd();
Note that we use glVertex4fv() to pass an arr ay containing all 4 coordinates in OpenGL.
These are the e
1
, e
2
, e
3
, and e
0
coordinates, or—in OpenGL terminology—the x, y, z,
and w coordinates. Alternatively, we could use
glVertex4f() and pass each coordinate
separately, as shown in the line that is commented out.
To l o a d
normalizedPoints in OpenGL, glVertex3fv() is used:
glBegin(GL_LINE_LOOP);
for (int i = 0; i < NB_NORMALIZED_POINTS; i++) {
const normalizedPoint &P = g_normalizedPoints[i];
glVertex3fv(P.getC(normalizedPoint_e1_e2_e3_e0f1_0));
//note e0 ’fixed’ at 1.0
// or:
// glVertex3f(P.e1(), P.e2(), P.e3());
}
glEnd();
Since both the normalizedPoint type and OpenGL assume that the e
0
coordinate is 1,
this works as expected.
Translation of the points is implemented using the generic translation formula of (11.13).
g_points[idx] = _point(g_points[idx] + (T ^ (e0 << g_points[idx])));
where T is the translation vector. The possible weight of the points is taken into
account automatically. In the case of
normalizedPoints, the left contraction (e0 <<
g
points[g dragPoint]) is evaluated at compile time, and has no run-time cost. That
is, the following code
g_normalizedPoints[idx] =
_normalizedPoint(g_normalizedPoints[idx] +
(T ^ (e0 << g_normalizedPoints[idx])));