Enns R.H. Computer Algebra Recipes for Mathematical Physics
Подождите немного. Документ загружается.


8.3. NONLINEAR ODES: APPROXIMATE METHODS 319
E =
b
a
e
2
(t) dt, (8.22)
over a range a to b of interest. One then tries to choose a Φ which minimizes the
total error. As in the Rayleigh–Ritz method, one or more adjustable parameters
may be included and the error is minimized with respect to these parameters.
As an example, let’s apply the Ritz method to the hard spring equation,
¨x + x + x
3
=0, (8.23)
with x(0) ≡ A =2, ˙x(0) = 0. Although we have already solved the hard spring
equation analytically in terms of Jacobian elliptic functions, the Ritz solution
will be compared to the numerical solution. As a trial function, let’s take
Φ=C
1
cos(ωt)+(A −C
1
) cos(3 ωt), (8.24)
with C
1
and ω adjustable parameters. At t=0, Φ(0)= A,
˙
Φ(0)= 0, so the initial
conditions are satisfied.
The value of A is entered along with the upper limit T = n 2 π/|ω| in the
time range t =0 to T “of interest” that will be used for plotting purposes. For
sake of definiteness, let’s take n=4, sothat T =8π/|ω|,withω to be determined.
>
restart: with(plots): A:=2: n:=4: T:=n*2*Pi/abs(omega):
The trial function Φ is entered.
>
Phi:=C1*cos(omega*t)+(A-C1)*cos(3*omega*t);
Φ:=C1 cos(ωt)+(2−C1) cos(3 ωt)
A functional operator e for generating the residual of the NLODE (8.23) is
formed. Entering e(Phi) then will produce the residual.
>
e:=x->diff(x,t,t)+x+xˆ3;
e := x → (
d
2
dt
2
x)+x + x
3
The total error is calculated, the assumption that ω>0 being provided to
facilitate the integration. A lengthy expression in terms of C1 and ω results.
>
Error:=int(e(Phi)ˆ2,t=0..T) assuming omega>0;
Error := π(1256 C1
4
+ 4032 ω
2
C1 − 1376 C1 + 2416 C1
2
+ 2592 ω
4
− 390 C1
5
− 2304 ω
2
+55C1
6
+ 544 − 2592 C1 ω
4
+ 656 C1
2
ω
4
+1728 C1
3
ω
2
− 3712 C1
2
ω
2
− 2256 C1
3
− 312 C1
4
ω
2
)/(2 ω)
The total error must be minimized with respect to ω and C1 . To this end, the
derivatives of the Error with respect to ω and C1 are set equal to zero in cond1
and cond2 . The very lengthy algebraic equations are not shown here.
>
cond1:=diff(Error,omega)=0; cond2:=diff(Error,C1)=0;
The two conditions are numerically solved for C1, ω and the solution assigned.
>
sol:=fsolve({cond1,cond2},{C1,omega}); assign(sol):
sol := {ω = −1.978539105, C1 =1.937051656}
320 CHAPTER 8. NLODES & PDES OF PHYSICS
The fully evaluated total error, trial function Φ, and time T , are now displayed.
>
Error:=evalf(abs(Error)); Phi:=Phi; T:=evalf(T);
Error := 0.2146672855
Φ:=1.937051656 cos(1.978539105 t)+0.062948344 cos(5.935617315 t)
T := 12.70267601
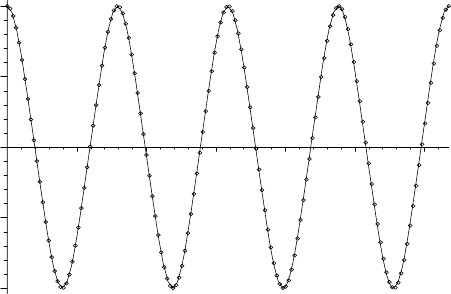
The trial function Φ is plotted over the time interval t=0 to T .SinceΦisour
“best” approximation to the exact solution x, the ordinate is labeled as x.
>
gr1:=plot(Phi,t=0..T,labels=["t","x"]):
The NLODE is solved numerically, subject to the same initial condition,
>
Y:=dsolve({e(y(t))=0,y(0)=A,D(y)(0)=0},y(t),numeric,
output=listprocedure):
and plotted over the same time range. A point style is chosen, the numerical
curve being represented by 150 size 12 black circles.
>
gr2:=odeplot(Y,[t,y(t)],0..T,style=point,symbol=circle,
symbolsize=12,numpoints=150,color=black):
The graphs of the Ritz and numerical solutions are superimposed,
>
display([gr1,gr2]);
the resulting picture being shown in Figure 8.11. The Ritz solution is in excel-
–2
0
x
2
6
t
12
Figure 8.11: Circles: numerical solution. Curve: Ritz solution.
lent agreement with the numerical points over the time range of the plot. It
should be mentioned that there are several variations on the Ritz approximation
method, which are discussed in Zwillinger’s book.

8.4. NONLINEAR PDES 321
8.4 Nonlinear PDEs
Most of the nonlinear PDEs that my graduate students and I have had to solve
in our research in nonlinear optics and fluid dynamics have involved either
seeking special solutions, or more often using numerical methods. Here, a few
examples of the former are presented, the latter being covered in Chapter 9.
8.4.1 John Scott Russell’s Chance Interview
The boisterous sea of liberty is never without a wave.
Thomas Jefferson, American president, (1743–1826)
Shortly after Jefferson’s death, the great Scottish naval architect, John Scott
Russell, made the following important scientific observation:
I was observing the motion of a boat which was rapidly drawn along a
narrow channel by a pair of horses, when the boat suddenly stopped –
not so the mass of water in the channel which it had put in motion;
it accumulated round the prow of the vessel in a state of violent
agitation, then suddenly leaving it behind, rolled forward with great
velocity, assuming the form of a large solitary elevation, a rounded
smooth and well-defined heap of water, which continued its course
along the channel apparently without change of form or diminution
of speed. I followed it on horseback, and overtook it still rolling on
at a rate of some eight or nine miles an hour, preserving its original
figure some thirty feet long and a foot to a foot and a half in height.
Its height gradually diminished, and after a chase of one or two
miles I lost it in the windings of the channel. Such, in the month of
August 1834, was my first chance interview with that singular and
beautiful phenomenon ...
The relevant nonlinear PDE describing the water waves for the above situa-
tion was derived several decades later by Korteweg and deVries, the Korteweg-
deVries (KdV) equation taking the form [KdV95]
∂ψ
∂t
+ ψ
∂ψ
∂x
+
∂
3
ψ
∂x
3
=0, (8.25)
with x the distance, t the time, and ψ the transverse displacement of the water
from equilibrium. Damping of the water waves is completely neglected here.
What Scott Russell observed was a special localized solution of the KdV equa-
tion, referred to as a solitary wave solution. The form of the solitary wave may
be obtained by assuming that ψ(x, t)=U(z = x−ct), subject to the asymptotic
boundary conditions that U(z) and all its derivatives vanish as |z|→∞.The
parameter c will be the speed of the solitary wave. In this recipe, U will be
derived and the solitary wave animated for two different values of c.
322 CHAPTER 8. NLODES & PDES OF PHYSICS
The plots and PDEtools packages are loaded, the former containing the
animation command, while the PDEtools package has the dchange command
which will be used to transform the variables in the KdV equation.
>
restart: with(plots): with(PDEtools):
The KdV equation (8.25) is entered.
>
pde:=diff(psi(x,t),t)+psi(x,t)*diff(psi(x,t),x)
+diff(psi(x,t),x,x,x)=0;
pde := (
∂
∂t
ψ(x, t)) + ψ(x, t)(
∂
∂x
ψ(x, t)) + (
∂
3
∂x
3
ψ(x, t)) = 0
The variable transformation x = z + cτ, t = τ,andψ(x, t)=U(z) is entered,
x, t and ψ(x, t) being the “old” variables, while z, τ,andU(z)arethe“new”
variables. This transformation will have the effect of reducing the nonlinear
pde to a nonlinear ODE.
>
tr:={x=z+c*tau,t=tau,psi(x,t)=U(z)};
tr := {x = z + cτ, t= τ, ψ(x, t)=U (z)}
The variable transformation tr is applied to pde using the dchange command.
>
ode1:=dchange(tr,pde,[z,tau,U(z)]);
ode1 := −(
d
dz
U (z)) c + U (z)(
d
dz
U (z)) + (
d
3
dz
3
U (z)) = 0
The lhs of ode1 is now integrated. Since U(z) and its second derivative must
vanish at z =∞, the integration constant is equal to zero. The integrated result
is set equal to zero, yielding the second order NLODE ode2 .
>
ode2:=int(lhs(ode1),z)=0;
ode2 := −c U (z)+
1
2
U (z)
2
+(
d
2
dz
2
U (z)) = 0
Then ode2 is analytically solved for U(z), yielding two implicit solutions.
>
sol:=dsolve(ode2,U(z));
sol :=
U (z)
3
√
−3 a
3
+9c a
2
+9 C1
d
a − z − C2 =0,
U (z)
−
3
√
−3 a
3
+9c a
2
+9 C1
d
a − z − C2 =0
The positive square root solution (the first one here) is now differentiated with
respect to z,anddU/dz is isolated to the lhs of the slope equation.
>
slope:=isolate(diff(sol[1],z),diff(U(z),z));
slope :=
d
dz
U (z)=
1
3
−3 U (z)
3
+9c U (z)
2
+9 C1
Since U(z)anddU(z)/dz vanish at z =∞, the integration constant
C1canbe
set equal to zero. The radical simplification command is also applied in ode3 .
>
ode3:=radsimp(eval(slope,_C1=0));
8.4. NONLINEAR PDES 323
ode3 :=
d
dz
U (z)=
1
3
√
3 U (z)
−U (z)+3c
The first order ODE ode3 is analytically solved.
>
sol2:=dsolve(ode3,U(z));
sol2 := z +
2 arctanh(
1
3
−3 U (z)+9c
√
c
)
√
c
+
C1 =0
Then sol2 is solved for U(z). The integration constant
C1 determines the
location of the peak of the solitary wave and can be set equal to zero without
loss of generality.
>
U:=eval(solve(sol2,U(z)),_C1=0);
U := 3 c − 3 tanh(
z
√
c
2
)
2
c
Converting U to a sine/cosine form and simplifying with the trig option gives
us the final form of the solitary wave solution in terms of the variable z.
>
U:=simplify(convert(U,sincos),trig);
U :=
3 c
cosh(
z
√
c
2
)
2
U has a maximum height at z = 0 which is proportional to c, a width which
decreases with increasing c, and goes to zero as |z|→∞. We can convert back
to the original variables by substituting z = x−ctinto U. ψ, given in the output
of the following command line, is the solitary wave observed so long ago by John
Scott Russell. This is clearly a localized pulse which travels unchanged in shape
in the positive x direction with velocity c. Since the height is proportional to
c, this implies that taller KdV solitary waves travel faster than shorter ones.
We can confirm this by animating the solitary wave profile for two different
velocities. First, let’s apply the unapply command to ψ, turning it into a
functional operator f depending on the value of c.
>
psi:=subs(z=x-c*t,U); f:=unapply(psi,c):
ψ :=
3 c
cosh(
(x − ct)
√
c
2
)
2
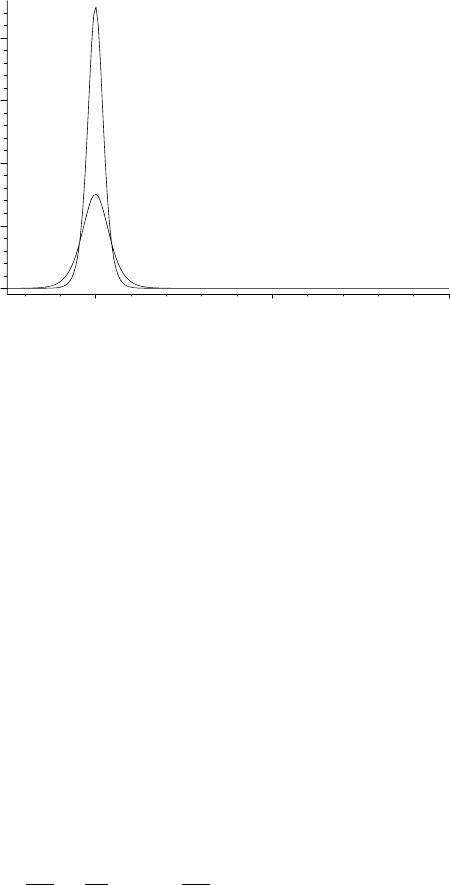
Taking c = 1 and c = 3, two solitary waves are animated by entering f(1) and
f(3) in the animate command. On executing the following command line on
the computer, and clicking on the plot, the animation will begin.
>
animate({f(1),f(3)},x=-10..40,t=0..10,numpoints=200,
frames=50,thickness=2,axes=framed,labels=["x","psi"]);
The initial profile of the animation is shown in Figure 8.12. As time progresses,
the shorter solitary wave lags behind the taller one.
324 CHAPTER 8. NLODES & PDES OF PHYSICS
0
2
4
6
8
psi
02040
x
Figure 8.12: Initial frame of the solitary wave animation.
This difference in speeds between solitary waves of different amplitudes will be
used in the next chapter to numerically test their stability against collisions
with one another. If they survive unchanged, except perhaps for a phase shift,
they are called solitons.
8.4.2 There is a Similarity
Ought not education to bring out and fortify the differences
rather than the similarities?
Virginia Woolf, British novelist, referring to the gender issue, (1882–1941).
In the previous recipe, the number of independent variables was reduced from
two to one, thus converting a nonlinear PDE to an ODE for which a physically
important exact solution could be obtained. It was a simple application of the
similarity method. Now I will show you a slightly more complicated similarity
solution, solving a nonlinear diffusion equation by taking a different algebraic
combination of the independent variables.
Consider the one-dimensional nonlinear diffusion equation,
∂C
∂t
=
∂
∂x
D(C)
∂C
∂x
,D(C)=C
n
, (8.26)
with the diffusion coefficient D no longer constant, but a function of the con-
centration C. Several special cases of (8.26) have been studied in the litera-
ture, viz., n = 3 to model the spreading of thin liquid films under the action
of gravity [Buc77], n ≥ 1 to describe the percolation of gas through porous
media [Mus37], and n=6 to model certain radiative heat transfer [LP80].
After loading the PDEtools and plots library packages,
>
restart: with(PDEtools): with(plots):
8.4. NONLINEAR PDES 325
the nonlinear diffusion equation (8.26) is entered. The inert form of the deriva-
tive operator is used to prevent the rhs from being explicitly differentiated.
>
pde:=Diff(C(x,t),t)-Diff(C(x,t)ˆn*diff(C(x,t),x),x)=0;
pde := (
∂
∂t
C (x, t)) − (
∂
∂x
(C (x, t)
n
(
∂
∂x
C (x, t)))) = 0
New variables z, τ ,andU(z) are introduced, related to the old variables x, t,
and C(x, t) by the transformation x = zτ
m
, t = τ ,andC(x, t)=U(z)/τ
m
,with
the parameter m to be determined.
>
tr:={x=z*tauˆm,t=tau,C(x,t)=U(z)/tauˆm};
tr := {x = zτ
m
,t= τ, C (x, t)=
U (z)
τ
m
}
The transformation is applied to pde using the dchange command, the result
then being multiplied by −τ
m+1
and expanded.
>
ode:=expand(-tauˆ(m+1)*dchange(tr,pde,[z,tau,U(z)]));
ode := (
d
dz
U (z)) zm+ U (z) m +
τ (
U (z)
τ
m
)
n
n (
d
dz
U (z))
2
(τ
m
)
2
U (z)
+
τ (
U (z)
τ
m
)
n
(
d
2
dz
2
U (z))
(τ
m
)
2
=0
To remove all τ factors from ode and thus really produce an ODE, we must
have (τ
m
)
2
=τ (1/τ
m
)
n
which is now entered.
>
eq:=(tauˆm)ˆ2=tau*(1/tauˆm)ˆn;
eq := (τ
m
)
2
= τ (
1
τ
m
)
n
Then eq is solved for m, yielding m =1/(n + 2). This m value will be automat-
ically substituted into ode .
>
m:=solve(eq,m);
m :=
1
2+n
Dividing ode by m, simplifying symbolically with the power option, and then
applying the general simplification command, yields the formidable looking
NLODE given in ode2
>
ode2:=simplify(simplify(ode/m,power,symbolic));
ode2 := (
d
dz
U (z)) z + U (z)+2U (z)
(n−1)
n (
d
dz
U (z))
2
+ U (z)
n
(
d
2
dz
2
U (z)) n
+ U (z)
(n−1)
n
2
(
d
dz
U (z))
2
+2U (z)
n
(
d
2
dz
2
U (z)) = 0
A general analytic solution to ode2 is sought using the dsolve command, the
result then being simplified symbolically with the power option.
>
sol:=simplify(dsolve(ode2,U(z)),power,symbolic);
326 CHAPTER 8. NLODES & PDES OF PHYSICS
sol := U (z)=
b( a)&where
[{
b( a)
n
(
d
d
a
b( a)) +
a b( a)+2 C1 + C1 n
2+n
=0},
{
a = z, b( a)=U (z)}, {z = a, U (z)= b( a)}]
A general solution for U(z) is not produced in sol, but U(z)=
b( a)where b( a)
satisfies a first order NLODE. A solution can be generated if the integration
constant
C1 is set equal to zero. The following operand command is used to
extract the resulting ODE from sol.
>
_C1:=0: ode3:=op([2,2,1],sol)[1];
ode3 :=
b(
a)
n
(
d
d a
b( a)) +
a b( a)
2+n
=0
Then, ode3 is analytically solved for
b( a).
>
sol2:=dsolve(ode3,_b(_a));
sol2 :=
b( a)=
(
−
a
2
n +4 C2 +2 C2 n
2+n
)
(
1
n
)
2
(
1
n
)
The integration constant
C2 controls the height and width of the solution.
Here, I will take
C2 =1. Substituting
a =z on the rhs of sol2 yields U(z).
>
U:=subs({_a=z,_C2=1},rhs(sol2));
U :=
(
−z
2
n +4+2n
2+n
)
(
1
n
)
2
(
1
n
)
The above solution only exists for z values such that (−z
2
n+4+2 n)/(2+n) ≥ 0.
Outside this range, we can take U = 0, which clearly satisfies the NLODE.
Substituting z = x/t
m
into U/t
m
gives us a solution, labeled c, in terms of the
original variables.
>
c:=subs(z=x/tˆm,U/tˆm);
c :=
⎛
⎜
⎜
⎜
⎝
−
x
2
n
(t
(
1
2+n
)
)
2
+4+2n
2+n
⎞
⎟
⎟
⎟
⎠
(
1
n
)
2
(
1
n
)
t
(
1
2+n
)
The x range for which c is valid is found by setting c =0 and solving for x.The
result is simplified with the radical simplification command and labeled X.
>
X:=radsimp(solve(c=0,x));
X :=
√
2
n (2 + n) t
(
1
2+n
)
n
As a specific example, let’s take n = 3, so the solution can be used to describe
the spreading of a thin liquid film under the action of gravity. Other n values
8.4. NONLINEAR PDES 327
can be chosen, if so desired. The total time range is taken to be T =1500, and
X is evaluated at this time and assigned the name X0 .
>
n:=3: T:=1500: X0:=eval(X,t=T):
The complete concentration profile C is then described by the following piece-
wise function.
>
C:=piecewise(abs(x)<X,c,abs(x)>X,0);
C :=
⎧
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎩
2
(2/3)
(−
3 x
2
5 t
(2/5)
+2)
(1/3)
2 t
(1/5)
|x| <
√
2
√
15 t
(1/5)
3
0
√
2
√
15 t
(1/5)
3
< |x|
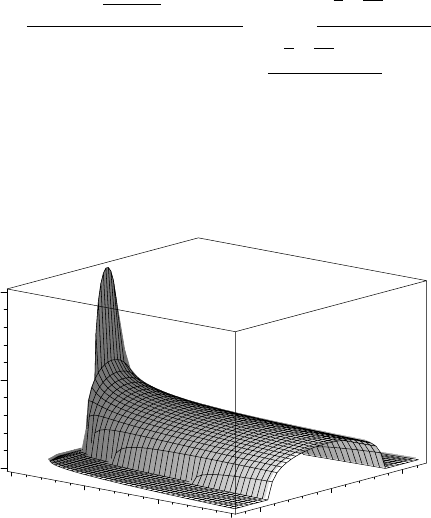
A 3-dimensional plot of C is now produced,
>
plot3d(C,x=-X-5..X+5,t=1..T,numpoints=1500,axes=box,labels
=["x","t","C"],orientation=[40,70],tickmarks=[3,3,3]);
the resulting picture being shown in Figure 8.13.
–10
0
10
x
0
500
1000
t
0
0.5
1
C
Figure 8.13: Similarity solution of the nonlinear diffusion equation for n=3.
The solution captures some of the experimentally observed features of spreading
thin films. Unlike the situation for the linear (D constant) diffusion equation,
there is now a sharp interface separating the regions of nonzero and zero con-
centration. Further, the interface propagates with finite speed, in contrast with
the infinite speed of linear diffusion. The propagation of this interface can be
observed by executing the following animate command, clicking on the resulting
computer plot, and on the start arrow.
>
animate(C,x=-X0..X0,t=1..T,frames=50,numpoints=500,
labels=["x","C"]);
For more on similarity methods, you are referred to Bluman and Cole [BC74].
328 CHAPTER 8. NLODES & PDES OF PHYSICS
8.4.3 Creating Something Out Of Nothing
Say nothing good of yourself, you will be distrusted;
say nothing bad of yourself, you will be taken at your word.
Joseph Roux, French priest, writer, (1834–86)
The sine-Gordon equation (SGE),
∂
2
u
∂x
2
−
∂
2
u
∂t
2
=sinu, (8.27)
is a model equation for describing the motion of a Bloch domain wall between
two ferromagnetic domains. A solitary wave solution to the SGE, describing the
Bloch wall motion, could be obtained in a similar manner to that for the KdV
equation. An alternate way is to make use of an auto-B¨acklund transformation.
Given a solution of a nonlinear PDE, such a transformation allows us to find a
different solution of the same PDE. More, generally a B¨acklund transformation
may enable one to use the solution of one nonlinear PDE to determine the
solution of another nonlinear PDE. B¨acklund transformations are difficult to
find, so in this recipe I will merely confirm the auto-B¨acklund transformation
for the SGE and use it to create a non-trivial solitary wave solution of (8.27),
starting with the trivial null (u=0) solution.
After loading the PDEtools and plots library packages,
>
restart: with(PDEtools): with(plots):
the sine-Gordon equation is entered.
>
sge:=diff(u(x,t),x,x)-diff(u(x,t),t,t)=sin(u(x,t));
sge := (
∂
2
∂x
2
u(x, t)) − (
∂
2
∂t
2
u(x, t)) = sin(u(x, t))
Introducing the variable transformation x=X +T , t= X −T , u(x, t)=U(X, T ),
>
tr:={x=X+T,t=X-T,u(x,t)=U(X,T)};
tr := {u(x, t)=U (X, T ),t= X −T, x = X + T }
and using the dchange command, the SGE takes the form shown in sge2 .
>
sge2:=dchange(tr,sge,[X,T,U(X,T)]);
sge2 :=
∂
2
∂X ∂T
U (X, T)=sin(U (X, T ))
From Zwillinger [Zwi89], the auto-B¨acklund transformation for the SGE is given
by ab1 and ab2 ,wherea is an arbitrary parameter.
>
ab1:=diff(V(X,T),X)=diff(U(X,T),X)+2*a*sin((V(X,T)+U(X,T))/2);
ab1 :=
∂
∂X
V (X,T)=(
∂
∂X
U (X,T)) + 2 a sin(
1
2
V (X,T)+
1
2
U (X,T))
>
ab2:=diff(V(X,T),T)=-diff(U(X,T),T)+(2/a)*sin((V(X,T)-U(X,T))/2);
ab2 :=
∂
∂T
V (X,T)=−(
∂
∂T
U (X,T)) +
2sin(
1
2
V (X,T) −
1
2
U (X,T))
a