Francoise J.-P., Naber G.L., Tsun T.S. (editors) Encyclopedia of Mathematical Physics
Подождите немного. Документ загружается.


sequence of symbols, namely ( ..., a
1
, a
0
, a
1
, a
2
, ...),
where a
i
2 {1, 2, ..., k} is the name of the partition
element containing f
i
(x), that is, f
i
(x) 2 R
a
i
for
each i. In general, not all sequences are realized by
orbits of f. Markov partitions are designed so that
the set of symbol sequences that correspond to real
orbits has Markovian properties; it is called a shift of
finite type.
The ergodic theory of Axiom-A systems has its
origins in statistical mechanics. In a 1D lattice model in
statistical mechanics, one has an infinite array of sites
indexed by the integers; at each site, the system can be
in any one of a finite number of states. Thus, the
configuration space for a 1D lattice model is the set of
bi-infinite sequences on a finite alphabet. Identifying
this symbol space with the one coming from Markov
partitions, Sinai and Ruelle were able to transport
some of the basic ideas from statistical mechanics,
including the notions of Gibbs states and equilibrium
states, to the ergodic theory of Axiom-A systems.
The notion of equilibrium states, which is
equivalent to Gibbs states for Axiom-A systems,
has the following meaning in dynamical systems in
general: given a potential funct ion ’, an invariant
measure is said to be an equilibrium state if it
maximizes the quantity
h
ðf Þ
Z
’d
where h
(f ) denotes the Kolmogorov–Sinai entropy of
f and the supremum is taken over all f-invariant
probability measures . In particular, when ’ = 0, this
measure is the measure that maximizes entropy; and
when ’ = log jdet (df j
E
u
)j, it is the Sinai–Ruelle–
Bowen (SRB) measure. From the physical or observa-
tional point of view, SRB measures are the most
important invariant measures for dissipative dynami-
cal systems because if f is a diffeomorphism of a
compact manifold M and a transitive Axiom-A
attractor with basin U, for example, =U = M,then
for Lebesgue-a.e. x 2 U and for every ’ 2 C
0
(M)
lim
n!1
1
n
X
n1
i¼0
’ðf
i
ðxÞÞ ¼
Z
’d
that is, Lebesgue-a.e. point is -typical. Thus, while
Axiom-A attractors will have chaotic motions, they are
statistically coherent in that the asymptotic distribution
of any typical orbit is given by the SRB measure.
Periodic Points and Their
Growth Properties
We discuss briefly some further results related to the
abundance of periodic points in Axiom-A systems.
For an Axiom-A diffeomorphism f,ifP(n) is the
number of periodic points of period n, then P(n)
e
hn
, where h is the topological entropy of f. That is
to say, the dynamical complexity of f is reflected in
its periodic behavior. An analogous result holds for
Axiom-A flows. This asymptotic behavior is known
to remarkably fine accuracy (Margulis 2004), and
these developments used the dynamical zeta func-
tion, which sums up the periodic information of a
system. In the discrete-time case, (z):= exp
P
1
n = 1
P(n)z
n
=n has been shown to be a rational function
analytic on jzj < e
h
. In the continuous-time case,
the zeta function is given by (z):=
Q
(1 exp(zl()))
1
, where the product is taken
over all (nonstationary) periodic orbits and l()
is the smallest positive period of . This function is
known to be meromorphic on a certain domain,
but the location of its poles, which are intimately
related to correlation decay properties of the
system, remains one of the yet unresolved issues in
Axiom-A theory.
Partial Hyperbolicity and
Dominated Splitting
There are various ways in which the notion of
hyperbolicity described above, which we will hence-
forth refer to as ‘‘uniform hyperbolicity,’’ can be
extended beyond the one presented so far. This can
be done with a view to weakening the conditions
under which some of the salient properties of
hyperbolic dynamical systems appear. The study of
partially hyperbolic dynamical systems and that
of dynamical systems possessing a dominated split-
ting is of this type. Further below, we describe a
different extension motivated more by a desire to
bring the results and methods of hyperbolic
dynamics to bear on systems that are closer to
some physical situations. This led to the study of
nonuniformly hyperbolic dynamical systems.
If one views hyperbolicity as requiring that the
spectrum of expansion and contraction rate s is
separated into two components by the unit circle,
then one can consider systems where this separati on
is provided by a circle centered at 0 whose radius
may not be 1 (partial hyperbolicity in the broad
sense), or by two circles centered at 0 of which one
has radius less than 1 and the other has radius
greater than 1, with possibly a third component of
the spectrum in the annulus between these (absolute
partial hyperbolicity). Further weakenings are
obtained by controlling not the whole spectrum in
this absolute way, but rather ratios of expansion and
contraction rates along orbits (dominated splitting
726 Hyperbolic Dynamical Systems

and relative partial hyperbolicity, respectively).
Among the motivations for these weakenings are
the desire to understand which systems are topolo-
gically transitive and robustly so (stable transitivity),
and to understand which ergodic volume-preserving
systems remain ergodic if perturbed within the space
of volume-preserving systems (stable ergodicity).
Pseudohyperbolicity
Let f be a smooth inver tible map. A compact
invariant set of f is said to be partially hyperbolic
in the broad sense if at every point in this set, the
tangent space splits into a direct sum of two
subspaces E
u
and E
s
with the property that these
subspaces are invariant under the differential df ,
that is, df (x)E
u
(x) = E
u
(f (x)), df (x)E
s
(x) = E
u
(f (x)),
and that there are con stants 0 <<, c > 0 such
that if v 2 E
s
(x) for some x then kdf
n
vkc
n
kvk
for n = 1, 2, ... and if v 2 E
u
(x) for some x
then kdf
n
vkc
n
kvk for n = 1, 2, .... This is
sometimes also referred to as the existence of a
(, )-splitting or pseudohyperbolicity.
Dominated Splitting
A further weakening of this condition replaces these
absolute estimates by relative ones. Let f be a
smooth invertible map. A compact invariant set of
f is said to admit a dominated splitting if at every
point in this set, the tangent space splits into a direct
sum of two subspaces E
u
and E
s
with the property
that these subspaces are invariant under the differ-
ential and there are constants 2 (0, 1), c > 0 such
that if u 2 E
u
(x)andv 2 E
s
(x) for some x then
kdf
n
vk=kdf
n
ukc
n
for n = 1, 2, ....
The presence of a dominated splitting has been
found to yield substantial information pertinent to
stability of such systems, and it plays a significant
role in a program of research aiming at a classifica-
tion of generic diffeomorphisms up to topological
conjugacy and specifically motivated by the ‘‘Palis
conjecture,’’ which aim s to describe that classifica-
tion. With respect to inferring topological and
ergodic (i.e., statistical) properties of the orbit
structure, the stricter notion of partial hyperbolicity
(in the narrow sense below) is more commo nly used,
but in this respect the presence of a dominated
splitting is also of interest because there is evidence
in supp ort of the conjecture that stable ergodicity
implies the presence of a dominated splitting.
Partial Hyperbolicity
Let f be a smooth inver tible map. A compact
invariant set of f is said to be (absolutely) partially
hyperbolic if at every point in this set, the tangent
space splits into a direct sum of unstable, central,
and stable directions E
u
, E
c
, and E
s
with the
property that these subspaces are invariant under
the differential df and that there exist numbers
C > 0,
0 <
1
1
<
2
2
<
3
3
with
1
< 1 <
3
½1
such that if v 2 E
s
(x), w 2 E
c
(x), u 2 E
u
(x),
n = 1, 2, ..., then
C
1
1
n
kvkkd
x
f
n
ðvÞk C
1
n
kvk
C
1
2
n
kwkkd
x
f
n
ðwÞk C
2
n
kwk
C
1
3
n
kukkd
x
f
n
ðuÞk C
3
n
kuk
In this case, we set E
cs
:= E
c
E
s
and E
cu
:= E
c
E
u
.
Following Burns–Wilkinson, we say that f is ‘‘center-
bunched’’ if max {
1
,
1
3
} <
2
=
2
.
As in the case of (uniformly) hyperbolic dynami-
cal systems, the sub-bundles E
s
and E
u
are integrable
to stable and unstable foliations W
s
and W
u
.Itis
not automatic that the center-stable sub-bundle E
cs
and the center-unstable sub-bundle E
cu
are tangent
to foliations W
cs
and W
cu
; if this happens to be the
case, the partially hyperbolic system is said to be
‘‘dynamically coherent.’’
Partial hyperbolicity can also be defined by a cone
criterion, with suitable adaptations.
Stable Ergodicity and Transitivity
Partial hyperbolicity was introduced as a means of
providing just enough hyperbolicity to render a
dynamical system ergodic or topologically transitive.
These are both irreducibility conditions, and to
obtain these, one rules out a Cartesian product
situation by assuming somethi ng like essential
accessibility: almost every two points (in the sense
of volume viewed as a measure) can be connected by
a curve consisting of a finite concatenation of arcs,
each of which lies entirely in one stable or unstable
leaf. A celebrated result in this field is in its original
form (with a much stronger center-bunching
assumption) due to Pugh and Shub: suppose a
volume-preserving diffeomorphism is partially
hyperbolic on the entire manifold. If it is dynami-
cally coherent and center bunched and has essential
accessibility, then it is ergodic (Hasselblatt and Pesin
2006).
One of the motivating aims of this theory was to
obtain nonhyperbolic volume-preserving systems
that are stably ergodic, that is, for which all
volume-preserving C
1
-small perturbations are also
ergodic. If, in addition to the above, one assumes
that essential accessibility also persists under such
Hyperbolic Dynamical Systems 727

perturbations and that the center bundle E
c
is
integrable to a center foliation W
c
that is smooth
(or ‘‘plaque-expansive’’), then ergodicity is indeed
stable (Hasselblatt and Pesin). There are quite a few
natural examples where these assumptions hold.
While essential accessibility does not always hold,
it is fairly common. The stronger property of
accessibility (that any two points can be connected,
not only almost every two points) is conjectured to
be stable under C
1
-perturbations and has been
shown to hold for an open dense set of partially
hyperbolic systems with respect to the C
1
-topology.
Ergodicity is a measure-theoretic irreducibility
notion, and topological transitivity is the topological
counterpart. It can also be obtained from accessi-
bility: a partially hyperbolic volume-preserving
diffeomorphism with the accessibility property is
topologically transitive (in fact, almost every orbit is
dense).
There are interesting converse results as well. Any
stably transitive diffeomorphism exhibits a domi-
nated splitting. Moreover, in dimension 2 it is
hyperbolic and in dimension 3 it is partially
hyperbolic in the broad sense.
Nonuniform Hyperbolicity
Applications have motivated weakening assump-
tions of uniform hyperbolicity to require only that
‘‘many’’ individual orbits exhibi t hyperbolic beha-
vior, without assuming that there are any uniform
estimates on the degree of hyperbolicity.
To measure the asymptotic contraction or expan-
sion of a vector on an exponential scale, one defines
the Lyapunov exponent of a (nonzero) tangent
vector v at x for the map f to be
ðx; vÞ:¼ lim
n!1
ð1=nÞlog kDf
n
ðvÞk ½2
whenever this limit exists. Note that being positive
indicates asymptotic expansion of the vector,
whereas negative exponents correspond to contract-
ing vectors. This defines a measurable but, save for
exceptional circumstances, discontinuous function
of x and v. It is relatively easy to see that for a given
point x the function (x, ) can only take finitely
many values, so it is natural to define nonuniform
hyperbolicity as the property of having all of these
finitely many values nonzero for ‘‘most’’ points.
Given that is measurable, it is natural to define
‘‘most’’ by using a measure that is invariant under
the map f. Therefore, the theory of nonuniformly
hyperbolic dynamical systems , much of which is due
to Pesin, is based on measure theory throughout.
The fundamental fact on which this theory is
based is the ‘‘Oseledets multi plicative ergodic theo-
rem,’’ which says that for a C
1
-diffeomorphism of a
compact Riem annian manifold the set of Lyapunov-
regular points has full measure with respect to any
f-invariant Borel probability measure.
For a Lyapunov-regular point the limit [2] exists
for all v, so this theorem tells us that no matter
which invariant measure we consider, the limit [2]
makes sense for all tangent vectors at points x
outside a null set. (One should add that this small
‘‘bad’’ set can be somewhat substantial; for example,
its Hausdorff dimension is usually that of the whole
space.)
Accordingly, one then defines a measure to be
hyperbolic if at almost every point the limit [2] is
nonzero for all vectors. In this case, one says that
‘‘f has nonzero Lyapunov exponents.’’ This property
can also be obtained from a cone criterion, but here
the fam ily of cones may only be invariant and
eventually strictly invariant, that is, there is a cone
field such that cones are mapped to cones (but not
necessarily into the interior of cones), and for almost
every point there is an iterate that maps a cone
strictly inside the cone at the image point (i.e., into
the interior). Which iterate is needed is allowed to
depend on the point (see Hyperbolic Billiards).
It is good to keep in mind that a hyperbolic
measure may be concentrated on a single point, say,
in which case there is not much gained by this
approach. The theory is of great interest, however, if
the measure is equivalent to volume or is the
‘‘physical measure’’ on an attractor.
Examples of this sort are fairly common, indeed
any smooth compact Riemannian manifold other
than the unit circle admits a volume-preserving
Bernoulli diffeomorphism with nonzero Lyapunov
exponents (Dolgopyat and Pesin 2002) (and every
compact smooth Riemannian manifold of dimension
at least 3 carries a volume-preserving Bernoulli flow
for which at almost every point the only zero
Lyapunov exponent is the one in the flow direction
(Hu et al. 2004)).
Structurally, these systems exhibit many of the
features seen in uniformly hyperbolic ones (e.g.,
stable manifolds), but instead of being continuous
these are now measurable. There are, however,
(noninvariant) sets of arbitrarily large measure on
which these structures are continuous. This provides
a handle for pushing some of the uniform theory to
this context.
There are some topological results in this area, of
which one of the more remarkable ones is that any
surface diffeomorphism with positive entropy con-
tains a horseshoe. Much of the current research is
728 Hyperbolic Dynamical Systems

directed at the ergodic theory of these systems. A
central result from the initial development of the
theory is that while these systems may not be
ergodic, the ergodic components are (a.e. equal to)
open sets, so in particular there are at most
countably many of them.
One natural question is whether nonuniformly
hyperbolic systems have SRB measures, and it is
answered on a case-by-case basis. There are even
benign examples where this fails to be the case, but
for some realis tic systems, such as the Lorenz and
He´non attractors, this has been established.
Because they preserve volume, this is not an issue
for billiard systems, (see Hyperbolic Billiards), that
is, the free motion of a point mass in a cavity with
elastic boundary collisions. This describes not just a
toy model, but also the phase space and dynamics of
a gas of convex rigid bodies. Such a gas of hard
spheres in a rectangular box is semidispersing and
has been studied intensely. It is now known to be
hyperbolic and hoped to be ergodic. (The latter
would provide a solid foundation for statistical
mechanics, at least for the case of spherical
molecules.) A gas of nonspherical convex rigid
bodies is also a point billiard, but it is not
semidispersing, which puts it beyond the range of
readily available techniques for establishing
ergodicity.
Further Remarks
The historical remarks made here are significantly
expanded in Hasselblatt (2002), which contains
some references to yet more detailed sources as
well as more detail about uniformly hyperbolic
dynamical systems in a concise form. A concise but
reasonably comprehensive and current account of
partially hyperbolic dynamics is in Hasselblatt and
Pesin, and an authoritative full presentation is in
Pesin (2004). A survey of nonuniformly hyperbolic
dynamics is given in Barreira and Pesin (2006), and
the definitive treatment is given by Barreira et al..A
textbook presentation of (not only) hyperbolic
dynamics is in Katok and Hasselblatt (1995) as
well as Hasselblatt and Katok (2003), and much
current research, including on all subjects discussed
here, is surveyed in Handbook.
See also: Ergodic Theory; Fractal Dimensions in
Dynamics; Generic Properties of Dynamical Systems;
Homoclinic Phenomena; Hyperbolic Billiards; Inviscid
Flows; Lyapunov Exponents and Strange Attractors;
Regularization for Dynamical Zeta Functions; Singularity
and Bifurcation Theory; Symmetry and Symmetry
Breaking in Dynamical Systems.
Further Reading
Barreira L, Katok A, and Pesin Y Smooth ergodic theory and
nonuniformly hyperbolic dynamics (in preparation).
Barreira L and Pesin Y (2006) Smooth ergodic theory and
nonuniformly hyperbolic dynamics. In: Hasselblatt B and
Katok A (eds.) Handbook of Dynamical Systems, vol. 1B,
pp. 57–263. Amsterdam: Elsevier.
Bowen R (1975) Equilibrium States and the Ergodic Theory of
Anosov Diffeomorphisms. Lecture Notes in Mathematics,
vol. 470. Berlin–New York: Springer.
Dolgopyat D and Pesin Y (2002) Every compact manifold carries
a completely hyperbolic diffeomorphism. Ergodic Theory and
Dynamical Systems 22(2): 409–435.
Hasselblatt B and Kotak A (eds.) (2002) Handbook of Dynamical
Systems, 1B: 2006, Hasselblatt B and Kotak A (eds.); 2: 2002,
Fiedler B (ed.); 3: in preparation, Broer H, Hasselblatt B, and
Takens F (eds.).
Hasselblatt B (2002) Hyperbolic dynamics. In: Hasselblatt B and
Katok A (eds.) Handbook of Dynamical Systems, vol. 1A,
pp. 239–319. Amsterdam: Elsevier.
Hasselblatt B and Katok A (2003) Dynamics: A First Course.
New York: Cambridge University Press.
Hasselblatt B and Katok A (2002) Principal structures. In:
Hasselblatt B and Katok A (eds.) Handbook of Dynamical
Systems, vol. 1A, pp. 1–203. Amsterdam: Elsevier.
Hasselblatt B and Pesin Y (2006) Partially hyperbolic dynamical
systems. In: Hasselblatt B and Kotak A (eds.) Handbook of
Dynamical Systems, vol. 1B, pp. 1–55. Amsterdam: Elsevier.
Hu H, Pesin Y, and Talitskaya A (2004) Every compact manifold
carries a hyperbolic Bernoulli flow. In: Brin M, Hasselblatt B,
and Pesin Y (eds.) Modern Dynamical Systems and Applica-
tions, pp. 347–358. Cambridge: Cambridge University Press.
Katok A and Hasselblatt B (1995) Introduction to the Modern
Theory of Dynamical Systems. New York: Cambridge
University Press.
Margulis G (2004) On some aspects of the theory of Anosov
systems. With a survey by Ricbard Sharp: Periodic orbits of
hyperbolic flows. Translated from the Russian by Valentina
Vladimirovna Szulikowska. Springer Monographs in Mathe-
matics. Berlin: Springer.
Pesin Y (2004) Lectures on Partial Hyperbolicity and Stable
Ergodicity. Zurich Lectures in Advanced Mathematics. Zu¨r-
ich: European Mathematical Society.
Smale S (1967) Differentiable dynamical systems. Bulletin of the
American Mathematical Society 73: 747–817.
Hyperbolic Dynamical Systems 729

I
Image Processing: Mathematics
G Aubert, Universite
´
de Nice Sophia Antipolis,
Nice, France
P Kornprobst, INRIA, Sophia Antipolis, France
ª 2006 Elsevier Ltd. All rights reserved.
Our society is often designated as being an ‘‘infor-
mation society.’’ It could also be defined as an
‘‘image society.’’ This is not only because image is a
powerful and widely used medium of communica-
tion, but also because it is an easy, compact, and
widespread way to represent the physical world. If
we think about it, it is indeed striking to realize just
how much images are omnipresent in our lives
through numerous applications such as medical and
satellite imaging, videosurveillance, cinema,
robotics, etc.
Many approaches have been developed to process
these digital images, and it is diffic ult to say which
one is more natural than the other. Image processing
has a long history. Maybe the oldest methods come
from 1D signa l proces sing techniques. They rely on
filter theory (linear or not), on spectral analysis, or
on some basic concepts of probability and statistics.
For an overview, we refer the interested reader to
the book by Gonzalez and Woods (1992).
In this article, some recent mathematical concepts
will be revisited and illustrated by the image
restoration problem, which is presented below. We
first discuss stochastic modeling which is widely
based on Markov random field theory and deals
directly with digital images. This is followed by a
discussion of variational approaches where the
general idea is to define some cost functions in a
continuous setting. Next we show how the scale
space theory is connected with partial differential
equations (PDEs). Finally, we present the wavelet
theory, which is inherited from signal processing
and relies on decomposition techniques.
Introduction
As in the real world, a digital image is composed of
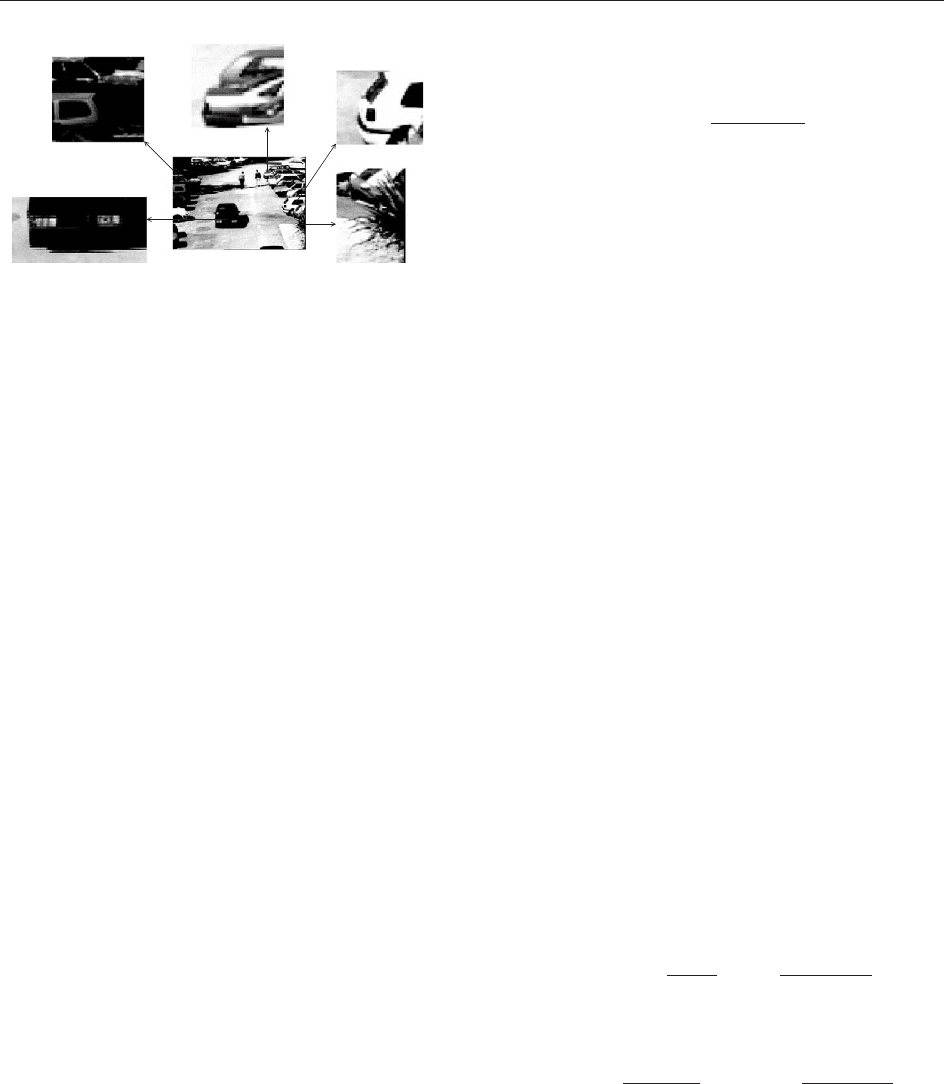
a wide variety of structures. Figure 1 shows different
kinds of ‘‘textures,’’ progressive or sharp contours,
and fine objects. This gives an idea of the complex-
ity of finding an approach that allows to cope with
the different structures at the same time. It also
highlights the discrete nature of images which will
be handled differently dependi ng on the chosen
mathematical tools. For instance, PDEs based
approaches are written in a continu ous setting,
referring to analogous images, and once the exist-
ence and the uniqueness of the solution have been
proved, we need to discretize them in order to find a
numerical solution. On the contrary, stochastic
approaches will directly consider discrete images in
the modeling of the cost functions.
The Image Restoration Problem
It is well known that during formation, transmis-
sion, and recording processes images deteriorate.
Classically, this degradation is the result of two
phenomena. The first one is deterministic and is
related to the image acquisition modality, to possible
defects of the imaging system (e.g., blur created by
an incorrect lens adjustment or by motion). The
second phenomenon is random and corresponds to
the noise coming from any signal transmission. It
can also come from image quantization. It is
important to choose a degradation model as close
as possible to reality. The random noise is usually
modeled by a probabilistic distribution. In many
cases, a Gaussian distribution is assumed. However,
some applications require more specific ones, like
the gamma distribution for radar images (speckle
noise) or the Poisson distribution for tomography.
Unfortunately, it is usually impossible to identify the
kind of noise involved for a given real image.
A commonly used model is the following. Let
u : R
2
!R be an original image describing a real
scene, and let f be the observed image of the same
scene (i.e., a degradation of u). We assume that
f ¼ Au þ ½1
where stands for a white additive Gaussian noise
and A is a linear operator representing the blur
(usually a convolution). Given f, the problem is
then to reconstruct u knowing [1]. This problem
is ill-posed, and we are able to carry out only an
approximation of u. In this article, we will focus on
the simplified model of pure denoising:
f ¼ u þ ½2
The Probabilistic Approach
The Bayesian Framework
In this section, we show how the problem of pure
denoising, that is, recovering u from the equation
f = u þ knowing only some statistical information
on can be solved by using a probabilistic
approach. In this context, f, u, and are considered
as random variables. The general idea for recovering
u is to maximize some prior probability. Most
models involve two parts: a prior model of possible
restored images u and a data model expressing
consistency with the observed data.
The prior model is given by a probability space
(
u
, p), where
u
is the set of all values of u. The
model is specified by giving the probability p(u)
on all these values.
The data model is a larger probability space
(
u, f
, p), where
u, f
is the set of all possible values
of u and all possible values of the observed image
f. This model is completed by giving the condi-
tional probability p(f =u)ofanyimagef given u,
resulting in the joint probabilities p(f , u) =
p(f =u)p(u). Implicitly, we assume that the spaces
(
u
)and(
u, f
) are finite although huge.
The next step is to use a Bayesian approach
introduced in image processing by Besag (1974)
and Geman and Geman (1984). The probabilities
p(u) and p(f=u) are supposed to be known and,
given an observed image f, we seek the image
u which maximizes the conditional a posteriori
probability p(u=f ) (MAP: Maximum A Posteriori).
Thanks to the Bayes’ rule, we have
pðu=f Þ¼
pðf =uÞ pðuÞ
pðf Þ
½3
Let us explain the meaning of the different terms
in [3]:
The term p(f =u) expresses the probability, the
likelihood, that an image u is realized in f. It also
quantifies the lack of total precision of the model
and the presence of noise.
The term p(u) expresses our incomplete a priori
information about the ideal image u (it is the
probability of the model, i.e., the propensity that
u be realized independently of the observation f ).
The term p(f ) which is the probability to observe f
is a constant and does not play any role when
maximizing the conditional probability p(u=f )
with respect to u.
Let us remark that the problem max
u
p(u=f )is
equivalent to min
u
E(u) = log p(f =u) log p(u).
So Bayesian models lead to a minimization
process.
Then the main question is how to assign these
probabilities? The easiest probability to determine is
p(f =u). If the images u and f consist in a set of values
u = (u
i, j
), i, j = 1, N and f = (f
i, j
), i, j = 1, N, we sup-
pose the conditional independence of (f
i, j
=u
i, j
) in any
pixel:
pðf =uÞ¼
Y
N
i¼1
pðf
i;j
=u
i;j
Þ
and if the restoration model is of the form f = u þ
where is a white Gaussian noise with variance
2
,
then
pðf
i;j
=u
i;j
Þ¼
1
ffiffiffiffiffiffiffiffiffi
2
p
exp
ðf
i;j
u
i;j
Þ
2
2
2
and
pðf =uÞ¼
1
ð2Þ
N=2
exp
X
N
i;j
ðf
i;j
u
i;j
Þ
2
2
2
Therefore, at this stage, the MAP reduces to
minimize
EðuÞ¼K
kf uk
2
log pðuÞ½4
where k.k stands for the Euclidean norm on R
N
2
and
K
is a constant. So, it remains now to assign a
probability law p(u). To do that, the most common
way is to use the theory of Markov random fields
(MRFs).
(a)
(b)
(c)
(d)
(e)
Figure 1 Digital image example. 1 the close-ups show
examples of low resolution, low contrasts, graduated shadings,
sharp transitions, and fine elements. (a) low resolution, (b) low
contrasts, (c) graduated shadings, (d) sharp transitions, and
(e) fine elements.
2 Image Processing: Mathematics

The Theory of Markov Random Fields
In this approach, an image is described as a finite set
S of sites corresponding to the pixels. For each site,
we associate a descriptor representing the state of
the site, for example, its gray level. In order to take
into account local interaction between sites, one
needs to endow S with a syst em of neighborhoods V.
Definition 1 For each site s, we define its neighbor-
hood V(s) as:
VðsÞ¼ftg such that s =2VðsÞ and t 2VðsÞ)s 2VðtÞ
Then we associate to this neighborhood system the
notion of clique: a clique is either a singleton or a set
of sites which are all neighbors of each other.
Depending on the neighborhood system, the family
of cliques will be different and involve more and less
sites. We will denote by C the set of all the cliques
relative to a neighborhood system V (see Figure 2).
Before introducing the general framework of
MRFs, let us define some notati ons. For a site s,
X
s
will stand for a random variable taking its values
in some set E (e.g., E = {0, 1, ..., 255}) and x
s
will be
a realization of X
s
and x
s
= (x
t
)
t6¼s
will denote an
image configuration where site s has been removed.
Finally, we will denote by X the random variable
X = (X
s
, X
t
, ...) with values in =E
jSj
.
Definition 2 We say that X is an MRF if the local
conditional probability at a site s is only a function
of V(s), that is,
pðX
s
¼ x
s
=X
s
¼ x
s
Þ¼pðX
s
¼ x
s
=x
t
; t 2VðsÞÞ
Therefore, the gray level at a site depends only on
gray levels of neighboring pixels. Now we give the
following fundamental theorem due to Hammersley–
Clifford (Besag 1974) which states the equivalence
between MRFs and Gibbs fields.
Theorem 1 Let us suppose that S is finite, E is a
discrete set and for all x 2=E
jSj
, p(X = x) > 0,
then X is an MRF relatively to a system of
neighborhoods V if and only if there exists a family
of potential functions (V
c
)
c 2C
such that
p(x) = (1=Z) exp(
P
c 2C
V
c
(x)).
The function V(x) =
P
c 2C
V
c
(x) is called the
energy potential or the Gibbs measure and Z is a
normalizing constant: Z = exp(
P
x 2
V(x)).
If, for example, the collection of neighborhoods is
the set of 4-neighbors, then the theorem says that
V(x) =
P
c = {s} 2C
1
V
c
(x
s
) þ
P
c = {(s, t)} 2C
2
V
c
(x
s
, x
t
).
Application to the Denoising Problem
Now, given this theorem we can reformulate, thanks
to [4], the restoration problem (with the change of
notation u = x and u
s
= x
s
): find u minimizing the
global energy
EðuÞ¼K
kf uk
2
þ VðuÞ½5
The next step is now to precise the Gibbs
measure. In restoration, the potential V(u) is often
dedicated to impose local regularity constraints, for
example, by penalizing differences between neigh-
bors. This can be modeled using cliques of order 2 in
the following manner:
VðuÞ¼
X
ðs;tÞ2C
2
ðu
s
u
t
Þ
where is a given real function. This term penalizes
the difference of intensities between neighbors which
may come from an edge or some noise. This discrete
cost function is very similar to the gradient penalty
terms in the continuous framework (see the next
section). The resulting final energy is (sometimes
E(u) is written E(u=f ))
EðuÞ¼K
X
s 2S
ðf
s
u
s
Þ
2
þ
X
ðs;tÞ2C
2
ðu
s
u
t
Þ
where the constant is a weight ing parameter
which can be estimated.
The difficulty in choosing the strength of the
penalty term defined by is to be able to penalize
the noise while keeping the most salient features,
that is, edges. Historicall y, the function was first
chosen as (z) = z
2
but this choice is not good since
the resulting regularization is too strong introducing
a blur in the image and loss of the edges. A better
choice is (z) = jzj (Rudin et al. 1992 )ora
regularized version of this function. Of course,
other choic es are possible depending on the con-
sidered application and the desired degree of
smoothness.
In this section, it has been shown how to model
the restoration problem through MRFs and the
Bayesian framework. Numerically, two main types
of algorithms can be used to minimize the energy:
deterministic algorithms and stochasti c algorithms.
The former are generally used when the global
energy is strictly convex (e.g., algorithms based on
C
1
C
2
C
1
C
2
Figure 2 Examples of neighborhood system and cliques.
Image Processing: Mathematics 3
gradient descent). The latter are rather used when
E(u) is not convex. There are stochastic minimiza-
tion algorithms mainly based on simulated anneal-
ing. Their main interest is that they always converge
(almost surely) to a minimizer (this is not the case
for deterministic algorithms which give only local
minimizers) but they are often strongly time
consuming.
We refer the reader to Li (1995) for more details
about MRFs and Bayesian framework and
Kirkpatrick et al. (1983) for more information on
stochastic algorithms.
The Variational Approach
Minimizing a Cost Function over a
Functional Space
One important issue in the previous section was the
definition of p(u) which gives some apriorion the
solution. In the variational approach, this idea is
also present but the way to infer it is in fact to
define the more suitable functional space that
describes images and their geometrical properties.
The choice of a functional space sets a norm which
in turn will constrain the solution to a certain
smoothness.
We illustrate this idea in this section on the
denoising problem [2] which can be seen as a
decomposition one. This means that given the
observation f, we look for u and such that
f = u þ, where incorporates all oscillations, that
is, noise, and also texture. Let us define a functional
to be minimized which takes into account the data f
and possibly some statistical informations about :
min
ðu;Þ
ðjuj
E
Þ such that ðjj
G
Þ¼
with f ¼u þg
½6
This formulation means that we look, among all
decompositions f = u þ , for the one which mini-
mizes (juj
E
) under the constraint (jj
G
) = .
Banach spaces E and G, and functions and
will be discussed in the next subsection. Since a
minimization problem under constraints can be
expressed with an a dditional term weighted by a
Lagrange multiplier, the formulation [6] can be
rewritten as:
min
ðu;Þ
ðjuj
E
Þþ ðjj
G
Þ; f ¼ u þ
½7
A similar writing consists in replacing by f u so
that [7] rewrites
min
u
ðjuj
E
Þþ ðjf uj
G
Þ
½8
which is the classical formulation in image restora-
tion. From a numerical point of view, the minimiza-
tion is usually carried out by solving the associated
Euler equations but this may be a difficult task. The
main concern is the search for E and G and their
norm (or seminorm). It is guided by the choice that
an image u is composed of various geometric
structures (homogeneous regions, edges) while
= f u repre sents oscillations (noise and textures).
Examples of Functional Spaces
In this section, we revisit some possible choices of
functional spaces summarized in Table 1.
The first case (a) was inspired by the classical
Tikhonov regularizatio n. The functional space
H
1
()( R
2
) is the space of functions in L
2
()
such that the distributional gradient Du is in L
2
().
Unfortunately, functions in H
1
() do not admit
discontinuities across curves and this is a major
problem with respect to image analysis since images
are made of smooth patches separated by sharp
variations.
Considering the problem reported in (a), Rudin et al.
(1992) proposed to work on BV(), the space of
bounded variations (BV) Ambrosio et al. (2000)
defined by
BVðÞ¼ u 2L
1
ðÞ;
Z
Du
jj
< 1
with
Z
Du
jj
¼ sup
Z
udiv’ dx;
’ ¼ð’
1
;’
2
; ...;’
N
Þ2C
1
0
ðÞ
N
;
j’j
L
1
ðÞ
1
½9
Table 1 Examples of functional spaces and their norm (see model [8])
Model E and juj
E
(t) G and juj
G
(t)
(a) H
1
(), juj
E
=
R
jruj
2
dx
1=2
t
2
L
2
() with its usual norm t
2
(b) BV (), juj
E
=
R
jDuj tL
2
() with its usual norm t
2
(c) BV (), juj
E
=
R
jDuj t fb 2 L
2
(); b = div, jj
L
1
()
2 1, Nj
@
= 0g t
4 Image Processing: Mathematics

It is equivalent to define BV() as the space of
L
1
() functions whose distributional gradient Du is
a bounded measure and [9] is its total variation. The
space BV() has some interesting properties:
1. lower semicontinuity of the total variation
R
Du
jj
with respect to the L
1
() topology,
2. if u 2BV(), we can define, for H
1
almost
everywhere x 2S
u
, the complement of Lebesgue
points (i.e., the jump set of u), a normal n
u
(x)
and two approximate ‘‘right’’ and ‘‘left’’ limits
u
þ
(x) and u
(x), and
3. Du can be decomposed as a sum of a regular
measure, a jump measure, and a Cantor measure:
Du ¼ru dx þðu
þ
u
Þn
u
H
1
=S
u
þ C
u
where ru is the approxima te gradient and H
1
the
one-dimensional Hausdo rff measure.
This ability to describe functions with disconti-
nuities across a hypersurface S
u
makes BV() very
convenient to describe images with edges. In this
context, the image restoration problem is well
posed and suitable numerical tools can be proposed
(Chambolle and Lions 1997).
One criticism of the model (b) in Table 1 pointed
out by Meyer (2001) is that if f is a characteristic
function and if f is sufficiently small with respect to
a suitable norm, then the model (Rudin et al. 1992)
gives u = 0 and = f contrary to what one should
expect (u = f and = 0). In fact, the main reason of
this phenomenon is that the L
2
-norm for the
component is not the right one since very oscillating
functions can have large L
2
-norm (e.g.,
f
n
(x) = cos(nx)). To better describe such oscillating
functions, Meyer (2001) introduced the space of
functions which can be expres sed as a divergence
of L
1
-fields. This work was developed in R
N
and
this framework was adapted to bounded 2D
domains by Aubert and Aujol (2005) (see (c) in
Table 1). An example of image decomposition is
shown in Figure 3.
In this section, we have shown how the choic e of
the functional spaces is closely related to the
definition of a v ariational formulation. The
functionals are written in a continuous setting and
they can usually be minimized by solving the
discretized Euler equations iteratively, until conver-
gence. These PDEs and the differential operators are
constrained by the energy definition but it is also
possible to work directly on the equations, forget-
ting the formal link with the energy. Such an
approach has also been much develo ped in the
computer vision community and it is illustrated in
the next section.
We refer the reader to Aubert and Kornprobst
(2002) for a general review of variational
approaches and PDEs as applied to image analysis.
Scale Spaces and PDEs
Another approach to perform nonlinear filtering
is to define a family of image smoothing operators
T
t
, depending on a scale parameter t. Given an
image f (x), we can define the image u(t, x) = ( T
t
f )(x)
which corresponds to the image f analyzed at scale t.
In this section, following Alvarez–Guichard–Lions–
Morel (Alvarez et al. 1993), we show that u(t, x)
is the solution of a PDE provided some suitable
assumptions on T
t
.
Basic Principles of a Scale Space
This section describes some natural assumptions to
be fulfilled by scale spaces. We first assume that the
output at scale t can be computed from the output at
a scale t h for very small h. This is natural, since a
coarser scale view of the original picture is likely to
be deduced from a finer one. T
t
is obtained by
composition of transition filters, denoted by T
tþh, t
.
So the first axiom is
(A1) T
tþh
= T
tþh, t
T
t
T
0
= Id
Another assumption is that operators act locally,
that is, (T
tþh, t
f )(x) depends essentially upon the
values of f (y) with y in a small neighborhood of x.
Taking into account the fact that as the scale
increases, no new feature should be created by the
scale space, we have the local comparison principle:
if an image u is locally brighter than another image
v, then this order must be conserved by the analysis.
This is expressed by:
(A2) For all u and v such that u(y) > v(y )ina
neighborhood of x and y 6¼ x, then for h small
enough, we have
ðT
tþh;t
uÞðxÞðT
tþh;t
vÞðxÞ
The third assumption states that a very smooth
image must evolve in a smooth way with the scale
Ori
g
inal u
η
Figure 3 Example of image decomposition (see Aubert and
Aujol (2005)).
Image Processing: Mathematics 5
space. Denoting the scalar product of two vectors of
R
N
by <x, y>, this assumption can be written as
(A3) Let u(y) = 1=2hA(y x), y xiþhp, y xiþc
be a quadratic form of R
2
, x fixed
(A = r
2
u(x) 2S
(2)
the set of 2 2 symmetric
matrices, p = ru(x) a vector of R
2
, c = u(x)a
constant.). We shall say that a scale space is
regular if there exists a function F(t , x, c, p, A),
continuous with respect to A, such that
ðT
tþh;t
u uÞðxÞ
h
!Fðt; x; c; p; AÞ when h !0
Scale Spaces are Governed by PDEs
In the following theorem, it is stated that the former
assumptions are sufficient to prove that scale spaces
are in fact governed by PDEs.
Theorem 2 Under assumptions A1, A2, A3, there
exists a continuous function F : [0, T] R
R
2
S
(2)
!R satisfying F(t,x,c,p,A) F(t,x,c,p,B)
for all p2R
2
, AandBinS
(2)
with A Bsuchthat
t
ðuÞ
¼
T
tþh;t
u u
h
!Fðt; x; u; ru; r
2
uÞ; h !0
þ
½10
uniformly for x 2R
2
, uniformly for u.
In eqn [10], the left-hand side term can be
interpreted as the partial temporal derivative with
respect to t so that the notion of PDEs arises. More
precisely, if f is continuous and uniformly bounded,
then it can be established that u(t, x) = (T
t
f )(x) is the
viscosity solution(see Definition 3)of
@u
@t
þ Hðt; x; u; ru; r
2
uÞ¼0 ðhere H ¼FÞ
uð0; xÞ¼f ðxÞ
½11
The map H : [0, T] R R
2
S
(2)
!R is called
a Hamiltonian and the decre asing property of H
with respect to S is called degenerate ellipticity.
The theory of viscosity solutions was introduced
in the 1980s by Crandall and P L Lions (Crandall
and Lions 1981, Crandall et al. 1992). When strong
solutions of [11] do not exist, this theory allows
to define solutions which are only continuous or
even discontinuous. The definition of viscosity
solutions is
Definition 3 Let H : R R
2
S
(2)
!R be con-
tinuous and degenerate elliptic and let u 2C
0
([0, T] ). Then u is a viscosity solution of [11]
in [0, T] if and only if
(i) u is a subsolution, that is, 8 2C
2
([0, T] ),
8(t
0
, x
0
) a local strict maximum point of (u )
(t, x), we have
@
@t
ðt
0
; x
0
ÞþHðt
0
; x
0
; uðt
0
; x
0
Þ; rðt
0
; x
0
Þ;
r
2
ðt
0
; x
0
ÞÞ 0
(ii) u is a supersolution, that is, 8 2C
2
([0, T] ),
8(t
0
, x
0
) a local strict minimum point of (u )
(t, x), we have
@
@t
ðt
0
; x
0
ÞþHðt
0
; x
0
; uðt
0
; x
0
Þ; rðt
0
; x
0
Þ;
r
2
ðt
0
; x
0
ÞÞ 0
In this definition, it is noticeable that derivatives of
u are replaced by the derivatives of the test functions
. Obviously, it can be verified that this notion of
weak solutions coincides with classical solution
when u has enough regularity.
Diffusion Operators Coming from the Scale Space
A step further is to assume additional properties on
the scale spaces and estimate the corresponding
operator. Invariance propert ies include geome tric
invariance axioms, contrast invariance, or scale
invariance. For example, if we assume the axioms
A1–A3, gray-level shift invariance:
(I1) T
t
(0) = 0, T
t
(u þ c) = T
t
(u) þ c for all u and all
constant c.
and translation invariance:
(I2) T
t
(
h
.u) =
h
.(T
t
u) for all h in R
2
, t 0, where
(
h
.u)(x) = u(x þ h).
Then it can be established that F in [10] is
independent of (x, u), that is, u(t, x) = (T
t
f )(x)is
the unique viscosity solution of
@u
@t
¼ Fðru; r
2
uÞ
uð0; xÞ¼f ðxÞ
With more precise assumptions, one can even
recover explicitly the operator F. As an example, if
we look for a linear scale space which verifies some
isometry assumption:
(I3) T
t
(R.u)(x) = R.(T
t
u)(x) for all orthogonal trans-
formation R on R
2
, where (R.u)(x) = u(Rx).
6 Image Processing: Mathematics