Francoise J.-P., Naber G.L., Tsun T.S. (editors) Encyclopedia of Mathematical Physics
Подождите немного. Документ загружается.

otherwise. Here t > 0ands > 0 are independent
parameters, but the parameter t
0
is determined as
t
0
=
ffiffiffi
2
p
(t þ s).
As can be seen from Figure 4, electrons are
allowed to hop to next-nearest neighbors. Thus,
Theorem 1 does not apply. The single-electron
ground states are not degenerate unless s = 0. We
set U
x
= U > 0 for any x 2 , and fix the electron
number as N
e
= N=2. In terms of filling factor, this
corresponds to the quarter filling.
Theorem 6 Suppose that the two dimensionless
parameters t/s and U=s are sufficiently large. Then
the ground states have S
tot
= S
max
(= N=4) and are
nondegenerate apart from the trivial spin degeneracy.
The theorem is valid, for example, when t=s 4.5
if U=s = 50, and t=s 2.6 if U=s = 100. It is crucial
that the statement of the theorem is valid only when
the interaction U is sufficiently large. In the same
model, it is also proved that low-lying excitation
above the ground state has a normal dispersion
relation of a spin-wave excitation.
We would like to point out that one can learn
more details about the Hubbard model and further
rigorous results from the review articles (Lieb 1995,
Tasaki 1998a, Tasaki 1998b). One can also find
references for most of the results discussed here in
these review articles, espec ially in Lieb (1995).
As for the latest results which are not included in
the above reviews, see recent publications, for
example, Lieb and Wu (2003), Tasaki (2003), and
Goldbaum (2005), and references therein.
Further Reading
Goldbaum PS (2005) Existence of solutions to the Bethe Ansatz
Equations for the 1D Hubbard model: finite lattice and
thermodynamic limit. Communications in Mathematical
Physics 258: 317–337 (cond-mat/0403736).
Lieb EH (1995) The Hubbard model – some rigorous results and
open problems. In: Iagolnitzer D (ed.) Proceedings of the XIth
International Congress of Mathematical Physics, Paris, 1994.
pp. 392–412. International Press. cond-mat/9311033.
Lieb EH and Wu FY (2003) The one-dimensional Hubbard
model: a reminiscence. Physica A 321: 1–27 (cond-mat/
0207529).
Tasaki H (1998a) The Hubbard model – an introduction and
selected rigorous results. Journal of Physics: Condensed
Matter 10: 4353–4378 (cond-mat/9512169).
Tasaki H (1998b) From Nagaoka’s ferromagnetism to flat-band
ferromagnetism and beyond – an introduction to ferromagnet-
ism in the Hubbard model. Prog. Theor. Phys. 99: 489–548
(cond-mat/9712219).
Tasaki H (2003) Ferromagnetism in the Hubbard model:
a constructive approach. Communications in Mathematical
Physics 242: 445–472 (cond-mat/0301071).
Hydrodynamic Equations see Interacting Particle Systems and Hydrodynamic Equations
Hyperbolic Billiards
Maciej P Wojtkowski, University of Arizona, Tucson,
AZ, USA and Institute of Mathematics PAN, Warsaw,
Poland
ª 2006 Published by Elsevier Ltd.
Introduction
Billiards are a class of dynamical systems with
appealingly simple description. A point particle
moves with constant velocity in a box of arbitrary
dimension (the billiard table) and r eflects elasti-
cally from the boundary (the component of velocity
perpendicular to the boundary is reversed and the
parallel component is preserved). Mathematically,
it is a class of Hamiltonian systems with collisions
defined by sy mplectic maps on the bou ndary of the
phase space. The billiard dynamics defines a one-
parameter group of maps
t
of the phase space
which preserve the Lebesgue measure , and are in
general only measurable due to discontinuitie s. The
boundaries of the box are made up of pieces,
concave, convex, and flat. Discontinuities occur at
the orbits tangent to concave pieces of the
boundary of the box. The orbits hitting two
adjacent pieces (‘‘corners’’) cannot be naturally
–s –s
t
′ t ′ t ′ t ′ t ′ t ′
ttt
Figure 4 An example of nonsingular Hubbard model which
exhibits saturated ferromagnetism.
716 Hyperbolic Billiards

continued, which is another so urce of disc ontinu-
ities. These singularities are not too severe so that
the flow has well-defin ed Lyap unov ex ponents and
Pesin structural theory is applicable (Katok and
Strelcyn 1986). A billiard system is called hyper-
bolic if it h as nonzero Lyapunov exponents on a
subset of po sitive Leb esgue measure, and comple-
tely hyperbolic if all of its L yapunov expo nents are
nonzero almos t ever ywhere, except for one ze ro
exponent in the direction of the flow.
Billiards in smooth strictly convex domains have
no singularities, but no such examples are known to
be hyperbolic.
In general, billiards exhibit mixed behavior just
like other Hamiltonian systems; there are invariant
tori intertwined with ‘‘chaotic sea.’’ In hyperbolic
billiards, stable behavior is excluded by the choice of
the pieces in the bounda ry of the box, arbitrary
concave pieces and special convex ones, and their
particular placement. Thus, hyperbolicity is achieved
by design, as in optical instruments.
It was established by Turaev and Rom-Kedar
(1998) that complete hyperbolicity may be lost
under generic singular perturbation of the billiard
system to a smooth Hamiltonian system.
Hyperbolicity is the universal mechanism for
random behavior in deterministic dynamical sys-
tems. Under suitable additional assumptions, it leads
to ergodicity, mixing, K-property, Bernoulli prop-
erty, decay of corre lations, central-limit theorem,
and other stochastic properties. Hyperbolic billiards
provide a natural class of examples for which these
properties were studied. In this article we restrict
ourselves to hyperbolicity itself.
The most prominent example of a hyperbolic
billiard is the gas of hard spheres. This way of
looking at the system was developed in the
groundbreaking papers of Sinai (see Chernov and
Sinai (1987) for an exhaustive list of references).
The collection of papers (Sza
´
sz 2000) contains
more up-to-date information. Another source on
hyperbolic billiards is the book by Chernov and
Markarian (2005). The books by Kozlov and
Treschev (1990),andbyTabachnikov (1995)
provide broad surveys of billiards from different
perspectives.
Jacobi Fields and Monotonicity
The key to understanding hyperbolicity in billiards
lies in two essentially equivalent descriptions of
infinitesimal families of trajectories. The basic
notion is that of a Jacobi field along a billiard
trajectory. Let (t, u) be a family of billiard
trajectories, where t is time and u is a parameter,
juj <. A Jacobi field along (t, 0) is defined by
J(t) = @=@u
ju = 0
.
Jacobi fields form a finite-dimensional vector
space which can be identified with the tangent to
the phase space at points along the trajectory. They
contain the same information as the derivatives of
the billiard flow D
t
. In particul ar, the Lyapunov
exponents are the exponential rate s of growth of
Jacobi fields.
Jacobi fields split naturally into parallel and
perpendicular components to the trajectory, each of
them a Jacobi field in its own right. The parallel
Jacobi field carries the zero Lyapunov exponent. In
the rest we discuss only the perpendicular Jacobi
fields. Between collisions the Jacobi fields satisfy the
differential equation J
00
= 0, hence J(t) = J(0) þ tJ
0
(0).
At a collision a Jacobi field undergoes a change by
the map
Jðt
þ
c
Þ¼RJðt
c
Þ
J
0
ðt
þ
c
Þ¼RJ
0
ðt
c
ÞþP
KPJðt
þ
c
Þ
½1
where J(t
c
) and J(t
þ
c
) are Jacobi fields immediately
before and after collision, K is the shape operator of
the piece of the boundary (K= rn, n is the inside
unit normal to the boundary), and P is the
projection along the velocity vector from the hyper-
plane perpendicular to the orbit to the hyperplane
tangent to the boundary. Finally, R is the orthogo-
nal reflection in the hyperplane tangent to the
boundary.
Perpendicular Jacobi fields at a point of a
trajectory can be identified with a subspace of the
tangent to the phase space, the subspace perpendi-
cular to the phase trajectory. To measure the
growth/decay of Jacobi fields, we introduce a
quadratic form on the tangent spaces, or equiva-
lently on Jacobi fields, Q( J, J
0
) = < J, J
0
> . Evalua-
tion of Q on a Jacobi field is a function of time Q(t).
Between collisions we have Q(t
2
) Q(t
1
) for t
2
t
1
(monotonicity). By [1] the monotonicity at the
collisions, that is, Q(t
þ
c
) Q(t
c
) is equivalent to
the positive semidefiniteness of the shape operator
K0, it holds for concave pieces of the boundary.
If K > 0 at a point of collision with the boundary,
then for ( J, J
0
) 6¼ (0, 0), we have Q(t
2
) > Q(t
1
) (strict
monotonicity), assuming that the collision occurred
between time t
1
and t
2
.
In billiards with concave pieces of the boundary,
where K0, K 6¼ 0, strict monotonicity may still
occur after sufficiently many reflections (eventual
strict monotonicity, or ESM). Such billiards are
called semidispersing, and the gas of hard spheres is
an example.
Hyperbolic Billiards 717

The role of monotonicity is revealed in the
following:
Theorem 1 (Wojtkowski 1991). If a system is
eventually strictly monotone (ESM), except on a set
of orbits of zero measure, then it is completely
hyperbolic.
The theorem applies to billiard systems. It can be
generalized and applied to other systems, not even
Hamiltonian (see Wojtkowski (2001) for precise
formulations, references and the history of this
idea).
The difficulty in applying the above theorem to
the gas of hard spheres lies in the gap between
monotonicity and strict monotonicity. There are
many orbits on which strict monotonicity is never
attained (parabolic orbits). Establishing that the
family of parabolic orbits has measure zero (or
better yet codimension 2) is a formidable task. It
was brought to conclu sion in the work of Sima´nyi
(2002).
Wave Fronts and Monotonicity
There is a geometric formulation of monotonicity
(which historically preceded the one given above).
Let us consider a local wave front, that is, a local
hypersurface W(0) perpendicular to a trajectory (t)
at t = 0. Let us consider further all billiard trajec-
tories perpendicular to W(0). The points on these
trajectories at time t form a local hypersurface W(t)
perpendicular again to the trajectory (warning: at
exceptional moments of time the wave front W(t)
may be singular). Infinitesimal ly wave fronts are
described by the shape operator U = rn, where n is
the unit normal field. U is a symmetric operator on
the hyperplane tangent to the wave front (and
perpendicular to the trajectory (t). The evolution
of infinitesimal wave fronts is described by the
formulas
UðtÞ¼ðtI þ Uð0Þ
1
Þ
1
without collisions
Uðt
þ
c
Þ¼RUðt
c
ÞR þ P
KP at a collision
½2
It follows that between collisions a wave front
that is initially convex (i.e., diverging, or U > 0) will
stay convex. Moreover, any wave front after a
sufficiently long run without collisions will become
convex (after which the normal curvatures of the
wave front will be decaying). The second part of [2]
shows that after a reflection in a strictly concave
boundary a convex wave front becomes strictly
convex (and its normal curvatures increase). These
properties are equivalent to (strict) monotonicity as
formulated above. Indeed, in the language of Jacobi
fields an infinitesimal wave front represents a linear
subspace in the space of perpendicular Jacobi fields,
that is, the tangent space. (Furthermore, it is a
Lagrangian subspace with respect to the standard
symplectic form.) We can follow individual Jacobi
fields or whole subspaces of them. It explains the
parallel of [1] and [2]. The form Q allows the
introduction of positive and negative Jacobi fields
and positive and negative Lagrangian subspaces. An
infinitesimal convex wave front represent s a positive
Lagrangian subspace. Monotonicity is equivalent to
the property that a positive Lagrangian subspace
stays positive under the dynamics (it may appear
that there is a loss of informat ion in formulas [2]
compared to [1], but actually they are equivalent
due to the symplectic nature of the dynamics
(Wojtkowski 2001).
Design of Hyperbolic Billiards
In view of [2] it seems that a convex piece in the
boundary (K < 0) excludes monotonicity. There are
two ways around this obstacle. First, we could
change the quadratic form Q at the convex
boundary. Second, we can treat convex pieces as
‘‘black boxes’’ and look only at incoming and
outgoing trajectories. Although the second strategy
seems more restrictive, all the examples constructed
to date fit the black box scenar io, and we will
present it in more detail.
To understand this approach, let us consider a
billiard table with flat pieces of the boundary and
exactly one convex piece. A trajectory in such a
billiard experiences visits to the convex piece
separated by arbitrary long sequences of reflections
in flat pieces, which do not affect the geometry of a
wave front at all. Hence, whatever is the geometry
of a wave front emerging from the curved piece it
will become convex and very flat by the time it
comes back to the curved piece of the boundary
again. Hence, it follows, at least heuristically, that
we must study the complete passage through the
convex piece of the boundary, regarding its effect on
convex, and especially flat, wave fronts.
Important difference between convex and concave
pieces is that a trajectory has usually several
consecutive reflections in the same convex piece;
moreover, the number of such reflections is
unbounded. A finite billiard trajectory is called
‘‘complete’’ if it contains reflections in one and the
same piece of the boundary, and it is preceded and
followed by reflections in other pieces.
Definition A complete trajectory is (st rictly)
z-monotone if for every nonzero Jacobi field the
718 Hyperbolic Billiards

value of the form Q (increases) does not decrease
between the point at the distance z before the first
reflection and the point at the distance z after the
last reflection.
A complete trajectory is parabolic if there is a
nonzero Jacob i field J such that J
0
vanishes before
the first and after the last reflection.
In the language of wave front s, a complete
trajectory is z-monotone if every diverging wave
front at a distance at least z from the first reflection
becomes diverging after the last reflection at the
distance z, or earlier.
It turns out that the only obstruction to mono-
tonicity of complete trajectories is parabolicity.
More precisely, if a complete trajectory is not
parabolic then it is z-monotone for some z > 0.
It follows from Theorem 1 that we get a
completely hyperbolic billiard if we put together
curved pieces with no complete parabolic trajec-
tories and some flat pieces, in such a way that for
every two con secutive complete trajectories, being
z
1
- and z
2
-monotone, respectively, the distance from
the last reflection in the first trajectory to the first
reflection in the second one is bigger than z
1
þ z
2
.
Indeed, we can put together the midpoints of
trajectories leaving one curved piece and hitting
another one into the Poincare´ section of the billiard
flow and we obtain immediately ESM for the return
map.
We can formulate somewhat informally two
principles for the design of hyperbolic billiards.
1. No parabolic trajectories Convex pieces of the
boundary cannot have complete parabolic
trajectories.
2. Separation There must be enough separa tion (in
space or in time through reflections in flat pieces)
between strictly z-monotone trajectories accord-
ing to the values of z.
All of the examples of hyperbolic billiards
constructed up to now are designed according to
these principles.
Hyperbolic Billiards in Dimension 2
Checking the absence of parabolic trajectories is
nontrivial due to the unbounded number of reflec-
tions in complete trajectories close to tangency. It
was accomplished so far only in integrable, or near
integrable examples, with the exception of convex
scattering pieces described in the following.
Billiards in dimension 2 are unde rstood best. First
of all, there is yet another way of describing
infinitesimal families of nearby trajectories. Every
infinitesimal family of rays in the plane has a point
of focusing (in linear approximation), possibly at
infinity. This point of focusing contains the same
information as the curvature of a wave front (it is
the center of curvature, rather than curvature itself)
and it has the advantage that it does not change
between collisions. The focusing points before and
after a reflection are related by the familiar mirror
equation of the geometric optics:
1
f
0
þ
1
f
1
¼
2
d
where f
0
, f
1
are the signed distances of the points of
focusing to the reflection point, d = r cos , r being
the radius of curvature of the boundary piece (r > 0
for a strictly convex piece), and the angle of
incidence. The mirror equation is just the two
dimensional version of [2].
It is instructive to consider an arc of a circle. A
billiard in a disk is integrable due to its rotational
symmetry. Let J be a Jacobi field obtai ned by
rotation of a traj ectory. This family of trajectories
(‘‘the rotational family’’) is focused exactly in the
middle between two consecutive reflections (that is
where J vanishes). It follows further from the mirror
equation that a parallel family of orbits is focused at
a distance d=2 after the reflection, and any family
focusing somewhere between the parallel family and
the rotational family will focus at a distance some-
where between d=2 and d, not only after the first
reflection, but also after arbitrary long sequence of
reflections.
Hence, any complete trajectory in an arc of a
circle is z-monotone, where 2z is the length of a
single segment of the trajectory and strictly
z
0
-monotone for any z
0
> z. Two arcs of a circle
separated by parallel segments form the stadium of
Bunimovich (1979).
Lazutkin (1973) showed that billiards in smooth
strictly convex domains are near integrable near the
boundary. Donnay (1991) applied Lazutkin’s
coordinates to establish that for an arbitrary strictly
convex arc the situation near the boundary is similar
to that in a circle, that is, complete traject ories near
tangency are z-monotone, where z is of the order of
the length of a single segment. In particular, no near
tangent complete trajectory can be parabolic. Hence,
this crucial calculation shows that if a strictly
convex arc has no parabolic trajectories then any
sufficiently small perturbation also has no parabolic
trajectories. It follows further that any sufficiently
small piece of a given strictly convex arc has no
parabolic trajectories.
It turns out that in dimension 2, complete
parabolic trajectories are also z-monotone for some
Hyperbolic Billiards 719

z > 0 (but clearl y not strictly monotone)
(Wojtkowski 2005). However, they are still an
obstacle to complete hyperbolicity because in general
nearby complete trajectories are z-monotone without
a bound for the values of z,sothatnoseparationof
convex pieces is sufficient.
Integrability of the elliptic billiard allows one to
establish strict monotonicity of trajectories in the
semi-ellipse with endpoints on the longer axis,
Wojtkowski 1986. Donnay (1991) showed that
also the semi-ellipse with endpoints on the shorter
axis has no parabolic trajectories provided that the
eccentricity is less than
ffiffiffi
2
p
=2. As the eccentricity
goes to
ffiffiffi
2
p
=2 the separation required to produce a
hyperbolic billiard goes to infinity. Markarian et al.
(1996) obtained explicitly the separation of the
elliptic pieces needed for hyperbolicity, when the
eccentricity is smaller than
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
2
ffiffiffi
2
p
p
=2.
It follows from the mirror equation that a
trajectory with one reflection in a convex piece is
always strictly z-monotone for z > d.Hence,iffor
any two consecutive reflections in convex pieces with
respective values of d equal to d
1
and d
2
, the distance
between reflections exceeds d
1
þ d
2
, then the billiard
is completely hyperbolic. For one convex piece this
condition, called convex scattering, turns out to be
equivalent to d
2
r=ds
2
< 0, where s is the arc length
(Wojtkowski 1986). This leads to examples of
hyperbolic billiards with one convex piece of the
boundary, like the domain bounded by the cardioid.
Also, any complete trajectory in a convex scatter-
ing piece is strictly z-monotone for z bigger than the
maximum of the values of d for the first and the last
segment of the trajectory. This allows to find easily
the explicit separation of convex scattering pieces
guaranteeing hyperbolicity.
Hyperbolic Billiards in Higher Dimensions
In higher dimensions, only two constructions of
hyperbolic billiards with convex pieces in the
boundary are known. The first construction by
Bunimovich (1988), involves a piece of a sphere
whose angular size, as seen from the center, does not
exceed =2(Wojtkowski 1990, 2005, Bunimovich
and Rehacek 1998). The second construction by
Papenbrock (2000) uses two cylinders, at 90
with
respect to each other to destro y integrability
(Wojtkowski 2005). In both cases, the successful
treatment is based on integrability of the billiard
systems bounded by a sphere or a cylinder .
In both of these constructions, trajectories need to
be cut into strict ly monotone pieces of unbounded
lengths. In the case of spherical caps, compl ete
trajectories are z-monotone with unbounded value
of z and the geometry of the billiard table is used to
separate them in time by sufficiently many reflec-
tions in flat pieces of the boundary (Wojtkowski
2005). In the case of cylinders, trajectories are cut
by consecutive returns to a Poincare´ section in the
middle of the billiard table.
Soft Billiards
The same ideas of monotonicity and strict mono-
tonicity are applicable to soft billiards, where
specular reflections are replaced by scatterers in
which the point particle is subjected to the action of
a spherically symmetric potential. As in ordinary
billiards, we compare the wave fronts along trajec-
tories before entering and after leaving scatterers.
Again, in the absence of parabolic trajectories
sufficient separation of the scatterers produces a
completely hyperbolic system.
The conditions on the potential that guarantee the
absence of parabolic trajectories were obtained by
Donnay and Liverani (1991) in the two-dimensional
case and by Ba´lint and To´th (2006) in higher
dimensions. The complete integrability of the
motion of a point particle in a spherically symmetric
potential is crucial in the derivation of these
conditions (Wojtkowski 2005).
See also: Billiards in Bounded Convex Domains; Ergodic
Theory; Hamiltonian Systems: Stability and Instability
Theory; Hyperbolic Dynamical Systems; Polygonal
Billiards; Random Matrix Theory in Physics.
Further Reading
Ba´lint P and To´th IP (2006) Hyperbolicity in multi-dimensional
Hamiltonian systems with applications to soft billiards.
Nonlinearity (to appear).
Bunimovich LA (1979) On the ergodic properties of nowhere
dispersing billiards. Communications in Mathematical Physics
65: 295–312.
Bunimovich LA (1988) Many-dimensional nowhere dispersing
billiards with chaotic behavior. Physica D 33: 58–64.
Bunimovich LA and Rehacek J (1998) How high-dimensional
stadia look like. Communications in Mathematical Physics
197: 277–301.
Chernov NI and Sinai YaG (1987) Ergodic properties of some
systems of 2-dimensional disks and 3-dimensional spheres.
Russian Mathematical Surveys 42: 181–207.
Chernov NI and Markarian R (2005) Billiards. Providence, RI:
American Mathematical Society.
Donnay V (1991) Using integrability to produce chaos: billiards
with positive entropy. Communications in Mathematical
Physics 141: 225–257.
Donnay V and Liverani C (1991) Potentials on the two-torus for
which the Hamiltonian flow is ergodic. Communications in
Mathematical Physics 135: 267–302.
720 Hyperbolic Billiards

Katok A and Strelcyn JM (1986) (with the collaboration of
F. Ledrappier and F. Przytycki) Invariant Manifolds, Entropy
and Billiards; Smooth Maps with Singularities, Lecture Notes
in Mathematics, 1222. Springer.
Kozlov VV and Treschev DV (1990) Billiards. A Genetic
Introduction to the Dynamics of Systems with Impacts.
Providence, RI: American Mathematical Society.
Lazutkin VF (1973) On the existence of caustics for the billiard ball
problem in a convex domain. Mathematics of the USSR-
Izvestiya 7: 185–215.
Markarian R, Oliffson Kamphorst S, and Pinto de Carvalho S
(1996) Chaotic properties of the elliptical stadium. Commu-
nications in Mathematical Physics 174: 661–679.
Papenbrock T (2000) Numerical study of a three dimensional
generalized stadium billiard. Physical Review E 61:
4626–4628.
Sima´nyi N (2002) The complete hyperbolicity of cylindric billiards.
Ergodic Theory and Dynamical Systems 22: 281–302.
Sza´sz D (ed.) (2000) Hard Ball Systems and the Lorentz Gas.
Encyclopaedia of Mathematical Sciences, 101. Berlin: Springer.
Tabachnikov S (1995) Billiards. Soc. Math. Paris, France.
Turaev D and Rom-Kedar V (1998) Elliptic islands appearing in
near-ergodic flows. Nonlinearity 11: 575–600.
Wojtkowski MP (1986) Principles for the design of billiards with
nonvanishing Lyapunov exponents. Communications in Math-
ematical Physics 105: 391–414.
Wojtkowski MP (1990) Linearly stable orbits in 3-dimensional
billiards. Communications in Mathematical Physics 129:
319–327.
Wojtkowski MP (1991) Systems of classical interacting particles
with nonvanishing Lyapunov exponents. In: Arnol’d L, Crauel H,
and Eckmann J-P (eds.) Lyapunov Exponents, Proceedings,
Oberwolfach 1990, Lecture Notes in Mathematics, 1486.
243–262.
Wojtkowski MP (2001) Monotonicity, J-algebra of Potapov and
Lyapunov exponents. In: Smooth Ergodic Theory and Its
Applications, pp. 499–521. Proc. Symp. Pure Math. American
Mathematical Society.
Wojtkowski MP (2005) Design of hyperbolic billiards. Preprint.
Hyperbolic Dynamical Systems
B Hasselblatt, Tufts University, Medford, MA, USA
ª 2006 Elsevier Ltd. All rights reserved.
Introduction
Division of Smooth Dynamical Systems
Linear maps can be elliptic (complex diagonalizable
with all eigenvalues on the unit circle), parabolic (all
eigenvalues on the unit circle but some Jordan blocks
of size at least 2), or hyperbolic (no eigenvalues on the
unit circle), and for differentiable dynamical systems,
that is, smooth maps or flows, one can roughly make
an analogous subdivision (see Hasselblatt and Katok
2002, p. 100f). The linear maps not covered by these
alternatives are those with some eigenvalues on the
unit circle and others off it; the corresponding class of
‘‘partially hyperbolic’’ dynamical systems is usually
considered in the context of hyperbolic dynamical
systems with a view to studying phenomena wherein
the hyperbolic behavior dominates. Thus, elliptic
dynamical systems are more or less similar to
isometries, with orbit separation constant or at most
oscillatory but without persistent growth. KAM
theory deals with elliptic systems, establishing that
much of the ellipticity in an integrable Hamiltonian
system persists under perturbation. Parabolic systems
may have polynomial orbit separation produced by a
local ‘‘shear’’ phenomenon; billiards in polygonal
domains are an example of this. Hyperbolic dynamical
systems are characterized by exponential divergence of
orbits. They are of interest because of the complexity
of their orbit structure with respect to both topological
and statistical behavior.
Specifically, the stretching (corresponding to
eigenvalues outside the unit circle in the case of
linear maps) combined with the folding necessitated
by compactness of the phase space produces not
only highly sensitive dependence of orbit asympto-
tics on initial conditions, but also a close intertwin-
ing of diff erent behaviors. On the one hand, there is
a dense set of periodic points, on the other hand, an
abundance of dense orbits. While there are only
finitely many periodic points of a given period, their
number grows exponentially as a function of the
period. The entropy of these systems is positive,
which indicates that the overall complexity of the
orbit structure grows exponentially as a function of
the length of time for which it is being tracked. In
effect, the behavior of orbits is so intric ate as to be
quasirandom, which makes it natural to use statis-
tical methods to describe these systems.
History of Hyperbolic Dynamical Systems
One strand of the history of hyperbolic dynamical
systems leads back to the question of the stability of
the solar system and to Poincare´, in whose prize
memoir on the three-body problem the possibility of
‘‘homoclinic tangles’’ first presented itself. For
Poincare´, this was important because the resulting
complexity demonstrates that this system is not
integrable. We describe below how hyperbolic
dynamics arises in this situation (see Figure 3).
Hyperbolic Dynamical Systems 721

Another strand emerged about a decade later with
Hadamard’s study of geodesic flows (free particle
motion) on negatively curved surfaces. Hadamard
noted that these exhibit the kind of sensitive
dependence on initial conditions as well as the
pseudorandom behavior that are central features of
hyperbolic dynamics. This subject was developed
much further after the advent of ergodic theory,
with the Boltzmann ergodic hypothesis as an
important motivation: work by numerous mathe-
maticians, principally Hedlund and Hopf, showed
that free particle motion on a negatively curved
surface provides examples of ergodic mechanical
systems. More than two decades later, in the 1960s,
Anosov and Sinai overcame a fundamental technical
hurdle and established that this is indeed the case in
arbitrary dimension. This was done in the more
general context of a class of dynamical systems
known now as Anosov systems, which were axio-
matically defined and systematically studied for the
first time during this period of research in Moscow.
A greater class of dynamical systems exhibiting
chaotic behavior was introduced by Smale in his
seminal 1967 paper under the name of Axiom-A
systems. This class includes the hyperbolic dynamics
arising from homoclinic tangles, see Figure 3
(see Homoclinic Phenomena). Smale’s motivation
was his program of classifying dynamical systems
under topological conjugacy, and the consequent
search for structurally stable systems. Today, Axiom-
A (and Anosov) systems are valued as idealized models
of chaos: while the conditions defining Axiom A are
too stringent to include many real-life examples, it is
recognized that they have features shared in various
forms by most chaotic systems. Here, we concentrate
on the discrete-time context to keep notations lighter.
Partial hyperbolicity was introduced in the 1970s
and has proved that a limited amount of hyperbo-
licity in a dynamical system can produce much of
the global complexity (such as ergodicity or the
presence of dense orbits) exhibited by hyperbolic
systems, and can do so in a robust way. Here one
imposes uniform conditions, but expansion and
contraction are not assumed to occur in all direc-
tions. Stable ergodicity has been an important
subject of research in the last decade.
Nonuniform hyperbolicity weakens hyperbolicity
by allowing the contraction and expansion rates to
be nonuniform. This was motivated by examples of
systems with hyperbolicity where expan sion or
contraction can be arbitrarily weak or absent in
places, such as the He´non attractor, and by
situations where hyperbolicity coexists with singula-
rities, such as for (semi)dispersing billiards (see
Hyperbolic Billiards).
With respect to both uniformly and nonuniformly
hyperbolic systems, dimension theory has been a
subject of much interest (computations and esti-
mates of the fractal dim ension of attractors and
hyperbolic sets, whi ch is deeply connected to
dynamical properties of the system).
A different weakening of hyperbolicity, the pre-
sence of a dominated splitting, has been of interest
from the a viewpoint to stability and classification
of diffeomorphisms.
The study of hyperbolic dynamics has always had
interactions with other sciences and other areas of
mathematics. In the natural and social sciences, this
is the study of chaotic motions of just about any
kind. Examples of applications in related areas of
mathematics are geometric rigidity (an interaction
with differential geometry) and rigidity of group
actions.
Uniformly Hyperbolic Dynamical Systems
Definitions
Let f be a smooth inver tible map. A compact
invariant set of f is said to be ‘‘hyperbolic’’ if at
every point in this set, the tangent space splits into a
direct sum of two subspaces E
u
and E
s
with the
property that these subspaces are invariant under the
differential df, that is, df (x)E
u
(x) = E
u
(f (x)),
df (x)E
s
(x) = E
u
(f (x)), and that df expands vectors
in E
u
and contra cts vectors in E
s
, that is, there are
constants 0 <<1 <, c > 0 such that if v 2 E
s
(x)
for some x, then kdf
n
vkc
n
kvk for n = 1, 2, ...,
and if v 2 E
u
(x) for some x, then kdf
n
vk
c
n
kvk for n = 1, 2, ....
If E
u
= {0} in the definition above, then the
invariant set is made up of attracting fixed points
or periodic orbits. Similarly, if E
s
= {0}, then the
orbits are repelling. If neither subspace is trivial,
then the behavior is locally ‘‘saddle-like,’’ that is to
say, relative to the orbit of a point x, most nearby
orbits diverge exponentially fast in both forward
and backward time. This is why hyperbolicity is a
mathematical notion of chaos.
An Anosov diffeomorphism is a smooth invertible
map of a compact manifold with the property that
the entire space is a hyperbolic set.
Axiom A, which is a larger class, focuses on the
part of the system that is not transient. More
precisely, a point x in the phase space is said to be
‘‘nonwandering’’ if every neighborhood U of x
contains an orbit that returns to U. A map is said
to satisfy Axiom A if its nonwandering set is
hyperbolic and contains a dense set of periodic
points.
722 Hyperbolic Dynamical Systems

Definitions in the continuous-time case are analo-
gous: f above is replaced by the time-t-maps of the
flow, and the tangent spaces now decom pose into
E
u
E
0
E
s
where E
0
, which is one dimensional,
represents the direction of the flow lines.
A geometric way of detecting (indeed, defining)
hyperbolicity is via the cone criterion: at every point
there is a cone that is mapped by the differential into
the interior of the corresponding cone at the image
point, and a ‘‘complementary’’ cone family behaves
similarly for the inverse.
Many continuous structures associated with a
hyperbolic dynamical system are, in fact, Ho¨ lder
continuous. (For a function g on a metric space this
is defined as the existence of C, >0 such that
d(g(x), g(y)) Cd(x, y)
whenever x, y are suffi-
ciently close to each other.) In the present article,
almost every assertion of continuity could be
replaced by one of Ho¨ lder continuity. This notion
is natural in this context because x
n
!y exponen-
tially fast implies that g(x
n
) !g(y) exponentially fast
if g is Ho¨ lder continuous.
Structure and Properties
Stable and Unstable Manifolds, Local
Product Structure
Anosov and Axiom-A systems are defined by the
behavior of the differential. Correspo nding to the
linear structures left invariant by df are nonlinear
structures, namely ‘‘stable manifolds’’ tangent to E
s
and ‘‘unstable manifolds’’ tangent to E
u
.
Thus, associated with an Anosov map are two
families of invariant manifolds, each one of which
fills up the entire phase space; they are sometimes
called the stable and unstable ‘‘foliations.’’ The
leaves of these foliat ions are transverse at each
point, that is, they intersect at positive angles,
forming a kind of (topological) coordinate system.
The map f expands distances along the leaves of one
of these foliations and contracts distances along the
leaves of the other. For Axiom-A systems, one has a
similar local product structure or ‘‘coordinate
system’’ at each point in the nonwandering set, but
the picture is local, and there are gaps: the stable
and unstable leaves do not necessarily fill out open
sets in the phase space.
There is much interest in determining the fractal
dimension (box-counting or Hausdorff, say) of
hyperbolic sets. So far the best dimension estimates
have been made for stable slices, that is, for the
intersection of a stable leaf with the hyperbolic set,
and for unstabl e slices. Because the local coordinate
systems describing the local product structure are
only known to be continuous, it is not known in
general whether the sum of these stable and unstable
dimensions gives the dimension of the hyperbolic set
(we don’t even know whether all stable slices have
the same fractal dimension). The problem is that an
-Ho¨ lder-continuous map can change dimensions by
a factor of or 1=. But there is evidence to suggest
that something like this ‘‘dimension product struc-
ture’’ may often be true – this has been established
for a class of solenoids.
Transitivity and Spectral Decomposition
In addition to these local structures, Axiom-A
systems have a global structure theore m known
as ‘‘spectral decomposition.’’ It says that the
nonwandering set of every Axiom-A map can be
written as X
1
[[X
r
where the X
i
are disjoint
closed invariant sets on which f is topologically
transitive, that is, has a dense orbit. The X
i
are
called ‘‘basic sets.’’ Each X
i
can be decomposed
further into a finite union
S
X
i, j
, where each X
i, j
is
invariant and topologically mixing under some
iterate of f. (Topological transitivity and mixing
are irreducibility conditions; transitivity means that
there is no proper open invariant subset, and
topological mixing says that given two open sets,
from some time onward the images of one will
always interse ct the other.) This decomposition is
reminiscent of the corresponding result for finite-
state Markov chains.
Stability
One of the reasons why hyperbolic sets are
important is their ‘‘robustness’’: they cannot be
perturbed away. More precisely, let f be a map
with a hyperbolic set which is locally maximal,
that is, it is the largest invariant set in some
neighborhood U. Then for every map g that is
C
1
-near f, the largest invariant set
0
of g in U
is again hyperbolic; moreover, f restricted to is
‘‘topologically conjugate’’ to g restricted to
0
. This
is mathematical shorthand for saying that not only
are the two sets and
0
topologically indistin-
guishable, but the orbit structure of f on is
indistinguishable from that of g on
0
.
The phenomenon above brings us to the idea of
‘‘structural stability.’’ A map f is said to be
structurally stable if every map gC
1
-near f is
topologically conjugate to f (on the entire phase
space). It turns out that a map is structurally stable
if and only if it satisfies Axi om A and an additional
condition called strong transversality.
Hyperbolic Dynamical Systems 723
Chains and Shadowing
We discuss next the idea of pseudo-orbits versus real
orbits. Letting d( , ) be the metric, a sequence of
points x
0
, x
1
, x
2
, ... in the phase space is called an
‘‘"-pseudo-orbit’’ or a ‘‘chain’’ of f if d(f (x
i
), x
iþ1
) <"
for every i. Computer-generated orbits, for example,
are pseudo-orbits due to round-off errors. A fact of
consequence to people performing numerical experi-
ments is that in hyperbolic systems, small errors at
each step get magnified exponentially fast. For
example, if the expansion rate is 3 or more , then
an "-error made at one step is at least tripled at each
subsequent step, that is, after only O(jlog "j)
iterates, the error is O(1), and the pseudo-orbit
bears no relation to the real one. There is, however,
a theorem that says that every pseudo-orbit is
‘‘shadowed’’ by a real one. More precisely, given a
hyperbolic set, there is a constant C such that if
x
0
, x
1
, x
2
, ... is an "-pseudo-orbit, then there is a
phase point z such that d(x
i
, f
i
(z)) < C" for all i.
Thus, paradoxical as it may first seem, this result
asserts that on hyperbolic sets, each pseudo-orbit
approximates a real orbit, even though it may
deviate considerably from the one with the same
initial condition.
The shadowing orbit corresponding to a bi-
infinite pseudo-orbit is, in fact, unique. From this,
one deduces easily the following Closing Lemma:
For any hyperbolic set, there is a constant C such
that the follow ing holds: Every finite orbit segment
x, f (x), ..., f
n1
(x) that nearly closes up, that is,
d(x , f
n1
(x)) <"for some small ", lies within <C" of
a genuine periodic orbit of period n. Thus, hyper-
bolic sets contain many periodic points.
Examples
Anosov Diffeomorphisms
A large class of Anosov diffeomorphisms comes
from ‘‘linear toral automorphisms,’’ that is, maps of
the n-dimensional torus induced by n n matrices
with integer entries, det = 1, and no eigenvalues of
modulus one. The most popular example is the map
obtained from
21
11
sometimes called the Arnol’d cat map because of an
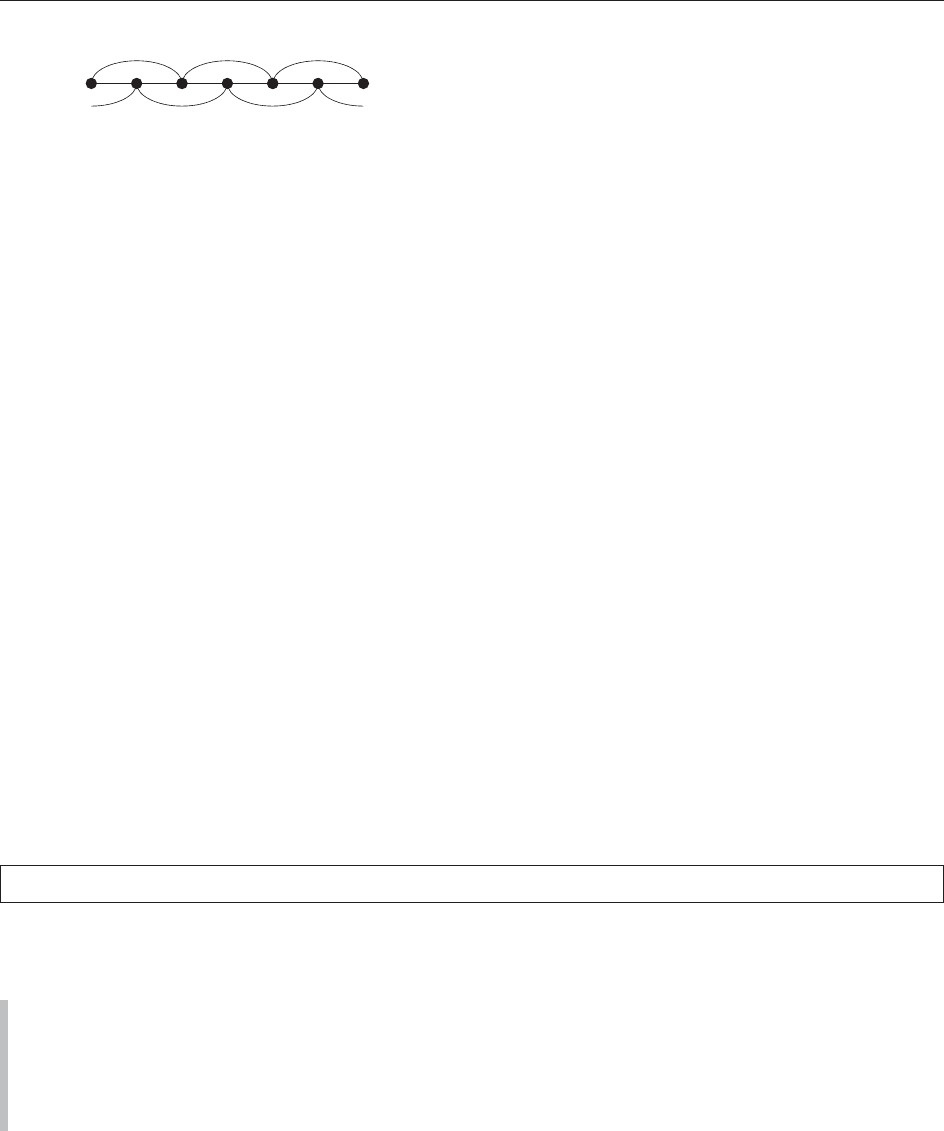
illustration used by Arnol’d. The unstable manifolds
are lines parallel to the expanding direction shown
in Figure 1 and wrapped around the torus, and the
stable manifolds are obtained from the orthogonal
lines.
We remark that due to their structural stability,
(nonlinear) perturbations of linear toral automorph-
isms continue to have the Anosov property. This
remark applies also to all of the examples below. In
fact, all known Anosov diffeomorphisms are topo-
logically identical to a linear toral automorphism (or
a slight generalization of these, infranil-m anifold
automorphisms).
Geodesic Flows
Geodesic flows describe free motions of points on
manifolds. Let M be a manifol d. Given x 2 M and a
unit vector v at x, there is a unique geodesic starting
from x in the directi on v. The geodesic flow ’
t
is
given by ’
t
(x, v) = (x
0
, v
0
) where x
0
is the point t units
down the geo desic and v
0
is the direction at x
0
.
Geodesic flows on manifolds of strictly negative
curvature are the main examples of Anosov flows.
They were studied by Hadamard (ca. 1900),
Hedlund and Hopf (1930s) considerably before
Anosov theory was developed.
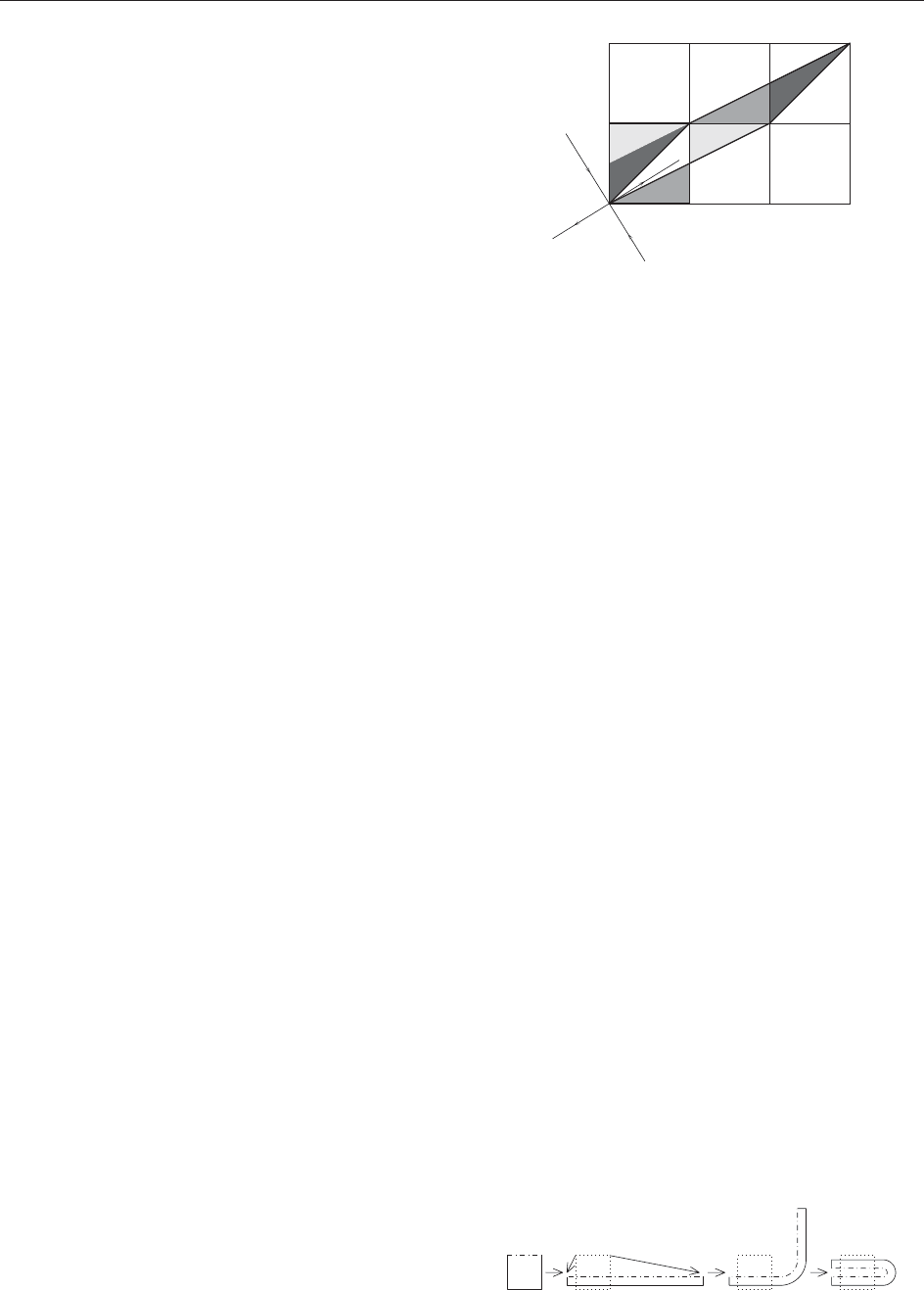
Horseshoes
Smale’s horseshoe is the prototypical example of a
hyperbolic invariant set. This map, so called because
it bends a rectangle B into the shape of a horseshoe
and puts it back on top of B, is shown in Figure 2.
The set {x: f
n
(x) 2 B for all n = 0, 1, 2, ...}is
hyperbolic. It is a two-dimensional Cantor set in B.
The emergence of this example can be traced back
directly to real-world systems.
During World War II, Cartwright and Littlewood
worked on relaxation oscillations in radar circuits,
Figure 1 A hyperbolic toral automorphism. Reproduced from
Katok A and Hasselblatt B (2003) Dynamics: A First Course.
Cambridge: Cambridge University Press, with permission from
Cambridge University Press.
Figure 2 The horseshoe.
724 Hyperbolic Dynamical Systems
consciously building on Poincare´’s work. Further
study of the underlying van der Pol equation by
Levinson contained the first example of a structu-
rally stable diffeomorphism with infinitely many
periodic points. (Structural stability originated in
1937 but began to flourish only 20 years later.) This
was brought to the attention of Smale. Inspired by
Peixoto’s work, who had carried out such a program
in dimension 2, Smale pursued a program of
studying diffeomorphisms with a view to classifica-
tion (Smale 1967). Until alerted by Levinson, Smale
conjectured that only Morse–Smale systems (which
have only finitely many periodic points with stable
and unstabl e sets in general position) could be
structurally stable. He eventually extracted the
horseshoe from Levins on’s work. Smale in turn
was in contact with the Russian school, where
Anosov systems (then C-orU-systems) had been
shown to be structurally stable, and their ergodic
properties were studied by way of further develop-
ment of the study of geodesic flows in negative
curvature.
The appearance of horseshoes in mathematical
models of real -world phenomena is quite wide-
spread. Ind eed, in a sense this is the mechanism for
the production of chaotic behavior, at least in
dimension 2. In disguise, one of the earliest
appearances of this phenomenon occurred in the
prize memoir of Poincare´, where homoclinic tangles
gave a first glimpse at the serious dynamical
complexity that can arise in the three-body problem
in celestial mechanics. If the stable and unstable
curves of a hyperbolic fixed point intersect trans-
versely (as in Figure 3a), this engenders further such
intersections and produces a complicated web of
accumulations of loops or lobes of stable and
unstable curves, as shown in Figure 3b. Homoclinic
tangles always produce horseshoes by the Smale–
Birkhoff theorem, illustrated by Figure 3c,soin
trying to solve the three-body problem, Poincare´
essentially discovered the possibility of nontrivial
hyperbolic behavior (see Hom oclinic Phenomena).
A related appearance of horseshoes in this context
is in the work of Alekseev, who used their presence
to show that capture of celestial bodies can indeed
occur.
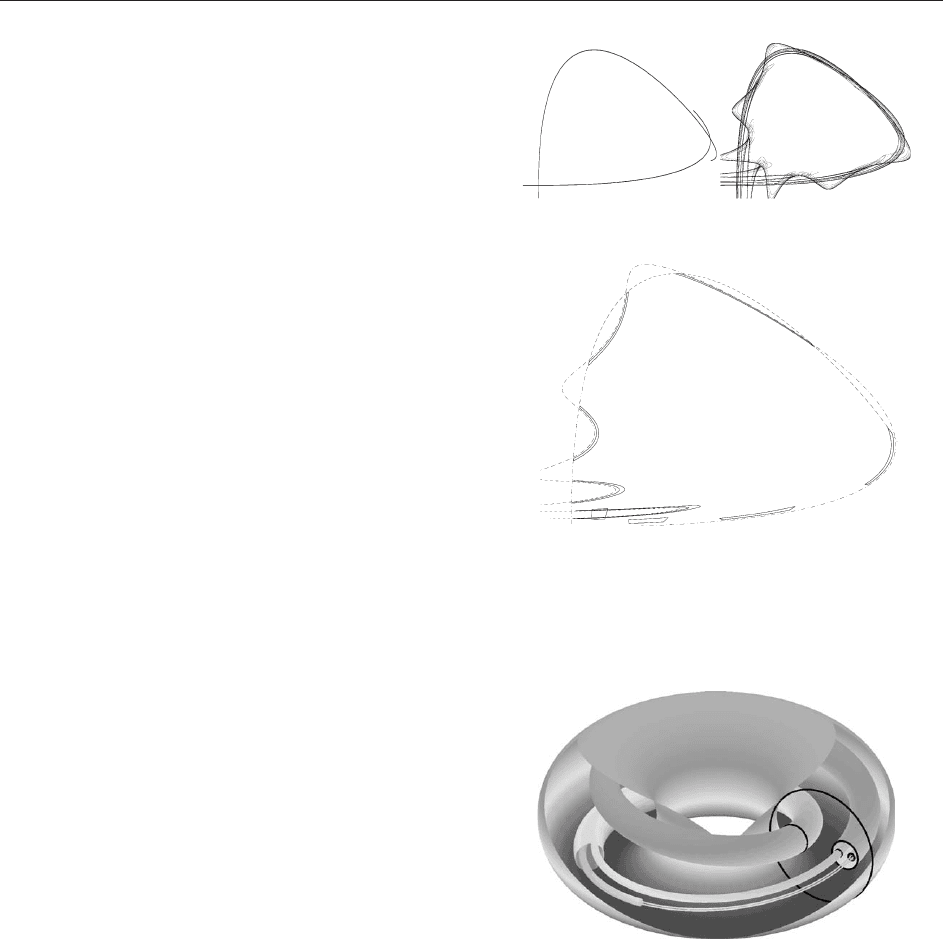
Solenoids
Finally we mention the solenoid, which is an
example of an Axiom-A attractor (see Figure 4).
Here the map f is defined on a solid torus M = S
1
D
2
, where D
2
is a two-dimensional disk. It is easiest
to descr ibe it in two steps: first it maps M into a
long thin solid torus, which is then put inside M
winding around the S
1
direction twice. The attractor
is given by =
T
n0
f
n
(M).
Symbolic Coding of Orbits and
Ergodic Theory
An important tool for studying the orbit structure of
Axiom-A systems is the ‘‘Markov partition,’’ con-
structed for Anosov systems by Sinai and extended to
Axiom-A basic sets by Bowen. Given a partition
{R
1
, ..., R
k
} of the phase space, there is a natural
way to attach to each point x in the phase space a
(a)
(b)
(c)
Figure 3 Homoclinic tangles produce horseshoes. Repro-
duced from Katok A and Hasselblatt B (2003) Dynamics: A
First Course. Cambridge: Cambridge University Press, with
permission from Cambridge University Press.
Figure 4 The solenoid. Reproduced from Katok A and
Hasselblatt B (2003) Dynamics: A First Course. Cambridge:
Cambridge University Press, with permission from Cambridge
University Press.
Hyperbolic Dynamical Systems 725