Francoise J.-P., Naber G.L., Tsun T.S. (editors) Encyclopedia of Mathematical Physics
Подождите немного. Документ загружается.


subgroup of SO(n)orO(n). Then M carries some
extra geometric structures compatible with g.
Broadly, the smaller Hol(g) is as a subgroup of
O(n), the more special g is, and the more extra
geometric struc tures there are. Therefore, under-
standing and classifying the possible holonomy
groups gives a family of interesting special Rieman-
nian geometri es, such as Ka¨ hler geometry. All of
these speci al geometries have cropped up in physics.
Define the holonomy algebra hol(g) to be the Lie
algebra of Hol(g), regarded as a Lie subalgebra of
o(n), defined up to the adjoint action of O(n).
Define hol
x
(g) to be the Lie algebra of Hol
x
(g), as a
Lie subalgebra of o(T
x
M) ffi
2
T
x
M. The holonomy
algebra hol(g) is intimately connected with the
Riemann curvature tensor R
abcd
= g
ae
R
e
bcd
of g.
Theorem 3 The Riemann curvature tensor R
abcd
lies in S
2
hol
x
(g) at x, where hol
x
(g) is regarded as a
subspace of
2
T
x
M. It also satisfies the first and
second Bianchi identities
R
abcd
þ R
adbc
þ R
acdb
¼ 0 ½3
r
e
R
abcd
þr
c
R
abde
þr
d
R
abec
¼ 0 ½4
A related result is the Ambrose–Singer holonomy
theorem, which, roughly speaking, says that hol
x
(g)
may be reconstructed from R
abcd
j
y
for all y 2 M,
moved to x by parallel transport.
If (M, g) and (N, h) are Riemannian manifolds, the
product M N carries a product metric g h.Itis
easy to show that Hol(g h) = Hol(g) Hol(h). A
Riemannian manifold (M, g) is called reducible if
every point has an open neighborhood isometric to a
Riemannian product and irreducible otherwise.
Theorem 4 Let (M, g) be Riemannian n-manifold.
Then the natural representation of Hol(g) on R
n
is
reducible if and only if g is reducible.
There is a class of Riemannian manifolds called
the ‘‘Riemannian symmetric spaces’’ which are
important in the theory of Riemannian holonomy
groups. A Riemannian symmetric space is a
special kind of Riemannian manifold with a
transitive isometry group. The theory of sym-
metric spaces was worked out by E
´
lie Cartan in
the 1920s, who classified them completely, using
his own classification of Lie groups and their
representations.
A Riemannian metric g is called ‘‘locally sym-
metric’’ if r
e
R
abcd
0, and ‘‘nonsymmetric’’ other-
wise. Every locally symmetric metric is locally
isometric to a Riemannian symmetric space. The
relevance of symmetric spaces to holonomy groups
is that many possible holonomy groups are the
holonomy group of a Riemannian symmetric space,
but are not realized by any nonsymmetric metric.
Therefore, by restricting attention to nonsymmetric
metrics, one considerably reduces the number of
possible Riemannian holono my groups.
A tensor S on M is constant if rS = 0. An
important property of Hol(g) is that it determines
the constant tensors on M.
Theorem 5 Let (M, g) be a Riemannian manifold,
with Levi-Civita connection r. Fix x 2 M, so
that Hol
x
(g) acts on T
x
M, and so on the tensor
powers
N
k
T
x
M
N
l
T
x
M. Suppose S 2 C
1
(
N
k
TM
N
l
T
M) is a constant tensor. Then Sj
x
is fixed by the action of Hol
x
(g). Conversely,
if Sj
x
2
N
k
T
x
M
N
l
T
x
M is fixed by Hol
x
(g),
it extends to a unique constant tensor
S 2 C
1
(
N
k
TM
N
l
T
M).
The main idea in the proof is that if S is a constant
tensor and : [0, 1] !M is a path from x to y, then
P
(Sj
x
) = Sj
y
, that is, ‘‘constant tensors are invariant
under parallel transport.’’ In particular, they are
invariant under parallel transport around closed
loops based at x, and so under elements of Hol
x
(g).
Berger’s Classification of Holonomy Groups
Berger classified Riemannian holonomy groups in
1955.
Theorem 6 Let M be a simply connected,
n-dimensional manifold, and g an irreducible, non-
symmetric Riemannian metric on M. Then
(i) Hol(g) = SO(n),
(ii) n = 2m and Hol(g) = SU(m) or U(m),
(iii) n = 4m and Hol(g) = Sp(m) or Sp(m)Sp(1),
(iv) n = 7 and Hol(g) = G
2
, or
(v) n = 8 and Hol(g) = Spin(7).
To simplify the classification, Berger makes three
assumptions: M is simply connected, g is irreducible,
and g is nonsymmetric. We can make M simply
connected by passing to the ‘‘universal cover.’’ The
holonomy group of a reducible metric is a product
of holonomy groups of irreducible metrics, and the
holonomy groups of locally symmetric metrics
follow from Cartan’s classification of Riemannian
symmetric spaces. Thus, these three assumptions can
easily be removed.
Here is a sketch of Berger’s proof of Theorem 6.
As M is simply connected, Theorem 2 shows Hol(g)
is a closed, connected Lie subgroup of SO(n), and
since g is irreducible, Theorem 4 shows the
representation of Hol(g)onR
n
is irreducible. So,
suppose that H is a closed, connected subgroup of
442 Riemannian Holonomy Groups and Exceptional Holonomy

SO(n) acting irreducibly on R
n
, with Lie algebra h.
The classification of all such H follows from the
classification of Lie groups (and is of considerable
complexity). Berger’s method was to take the list of
all such groups H, and to apply two tests to each
possibility to find out if it could be a holonomy
group. The only groups H which passed both tests
are those in the theorem.
Berger’s tests are algebraic and involve the
curvature tensor. Suppose that R
abcd
is the Riemann
curvature of a metric g with Hol(g) = H. Then
Theorem 3 gives R
abcd
2 S
2
h, and the first Bianchi
identity [3] applies. But if h has large codimension in
o(n), then the vector space R
H
of elements of S
2
h
satisfying [3] will be small, or even zero. However,
the ‘‘Ambrose–Singer holonomy theorem’’ shows that
R
H
must be big enough to generate h. For many of the
candidate groups H, this does not hold, and so H
cannot be a holonomy group. This is the first test.
Now r
e
R
abcd
lies in (R
n
)
R
H
, and also satisfies
the second Bianchi identity, eqn [4]. Frequently,
these imply that rR = 0, so that g is locally
symmetric. Therefore, we may exclude such H, and
this is Berger’s second test.
Berger’s proof does not show that the groups on
his list actually occur as Riemannian holonomy
groups – only that no others do. It is now known,
though this took another thirty years to find out,
that all possibilities in Theorem 6 do occur.
The Groups on Berger’s List
Here are some brief remarks about each group on
Berger’s list.
(i) SO(n) is the holonomy group of generic
Riemannian metrics.
(ii) Riemannian metrics g with Hol( g) U(m) are
called ‘‘Ka¨ hler metrics.’’ Ka¨hler metrics are a natural
class of metrics on complex manifolds, and generic
Ka¨ hler metrics on a given complex manifold have
holonomy U(m).
Metrics g with Hol(g) = SU(m) are called Calabi–
Yau metrics. Since SU(m) is a subgroup of U(m), all
Calabi–Yau metrics are Ka¨hler. If g is Ka¨hler and M
is simply connected, then Hol(g) SU(m) if and
only if g is Ricci-flat. Thus, Calabi–Yau metrics are
locally more or less the same as Ricci-flat Ka¨hler
metrics.
If (M, J) is a compact complex manifold with
trivial canonical bundle admitting Ka¨ hler metrics,
then Yau’s solution of the Calabi conjecture gives a
unique Ricci-flat Ka¨ hler metric in each canonical
class. This gives a way to construct many examples
of Calabi–Yau manifolds, and explains why these
have been named after them.
(iii) Metrics g with Hol(g) = Sp(m)arecalled
‘‘hyper-Ka¨hler.’’ As Sp(m) SU(2m) U(2m), hyper-
Ka¨hler metrics are Ricci-flat and Ka¨hler.
Metrics g with holonomy group Sp(m)Sp(1) for
m 2 are called ‘‘quaternionic Ka¨ hler.’’ (Note that
quaternionic Ka¨ hler metrics are not in fact Ka
¨hler.)
They are Einstein, but not Ricci-flat.
(iv), (v) G
2
and Spin(7) are the exceptional cases,
so they are called the ‘‘exceptional holonomy
groups.’’ Metrics with these holonomy groups are
Ricci-flat.
The groups can be understood in terms of the four
division algebras: the real numbers R, the complex
numbers C, the quaternions H, and the octonions or
Cayley numbers O.
SO(n) is a group of automorphisms of R
n
.
U(m)andSU(m) are groups of automorphisms of C
m
.
Sp(m) and Sp(m) Sp(1) are automorphism groups
of H
m
.
G
2
is the automorphism group of Im O ffi R
7
.
Spin(7) is a group of automorphisms of O ffi R
8
,
preserving part of the structure on O .
The Exceptional Holonomy Groups
For some time after Berger’s classification, the
exceptional holonomy groups remained a mystery.
In 1987, Bryant used the theory of exterior
differential systems to show that locally there exist
many metrics with these holonomy groups, and gave
some explicit, incomplete examples. Then in 1989,
Bryant and Salamon found explicit, complete
metrics with holonomy G
2
and Spin(7) on non-
compact manifolds. In 1994–95, the author con-
structed the first examples of metrics with holonomy
G
2
and Spin(7) on compact manifolds. For more
information on exceptional holonomy, see Joyce
(2000, 2002).
The Holonomy Group G
2
Let (x
1
, ..., x
7
) be coordinates on R
7
. Write dx
ij...l
for the exterior form dx
i
^ dx
j
^^dx
l
on R
7
.
Define a metric g
0
, a 3-form ’
0
, and a 4-form ’
0
on R
7
by
g
0
¼ dx
2
1
þþdx
2
7
’
0
¼ dx
123
þ dx
145
þ dx
167
þ dx
246
dx
257
dx
347
dx
356
’
0
¼ dx
4567
þ dx
2367
þ dx
2345
þ dx
1357
dx
1346
dx
1256
dx
1247
½5
The subgroup of GL(7, R) prese rving ’
0
is the
exceptional Lie group G
2
. It also preserves g
0
, ’
0
,
Riemannian Holonomy Groups and Exceptional Holonomy 443

and the orientation on R
7
. It is a compact,
semisimple, 14-dimensional Lie group, a subgroup
of SO(7).
A G
2
-structure on a 7-manifold M is a principal
sub-bundle of the frame bundle of M, with
structure group G
2
.EachG
2
-structure gives rise
to a 3-form ’ and a metric g on M, such that every
tangent space of M admits an isomorphism with R
7
identifying ’ and g with ’
0
and g
0
, respectively. By
an abuse of notation, (’, g) can be referred to as a
G
2
-structure.
Proposition 7 Let M be a 7-manifold and (’, g) a
G
2
-structure on M. Then the following are
equivalent:
(i) Hol(g) G
2
, and ’ is the induced 3-form;
(ii) r’ = 0 on M, where r is the Levi-Civita
connection of g; and
(iii) d’ = d(’) = 0 on M.
The equations d’ = d(’) = 0 look like linear
partial differential equations on ’. However , it is
better to consider them as nonlinear, for the
following reason. The 3-form ’ determines the
metric g,andg gives the Hodge star on M.So
’ is a nonlinear function of ’,andd(’) = 0a
nonlinear equation. Thus, constructing and study-
ing G
2
-manifolds come down to studying solu-
tions of nonlinear elliptic partial differential
equations.
Note that Hol(g) G
2
if and only if r’ = 0
follows from Theorem 5 . We call r’ the
‘‘torsion’’ o f the G
2
-structure (’, g), and when
r’ = 0theG
2
-structure is ‘‘torsion-free.’’ A triple
(M, ’, g)iscalledaG
2
-manifold if M is a
7-manifold and (’, g) a torsion-fre e G
2
-structure
on M.Ifg has holonomy Hol(g) G
2
,theng is
Ricci-flat.
Theorem 8 Let M be a compact 7-manifold, and
suppose that (’, g) is a torsion-free G
2
-structure on M.
Then Hol(g) = G
2
if and only if
1
(M) is finite. In
this case, the moduli space of metrics with holon-
omy G
2
on M, up to diffeomorphisms isotopic to
the identity, is a smooth manifold of dimension
b
3
(M).
The Holonomy Group Spin(7)
Let R
8
have coordinates (x
1
, ..., x
8
). Define a
4-form
0
on R
8
by
0
¼dx
1234
þdx
1256
þdx
1278
þdx
1357
dx
1368
dx
1458
dx
1467
dx
2358
dx
2367
dx
2457
þ dx
2468
þ dx
3456
þ dx
3478
þ dx
5678
½6
The subgroup of GL(8, R) preserving
0
is the
holonomy group Spin(7). It also preserves the
orientation on R
8
and the Euclidean metric
g
0
= dx
2
1
þþdx
2
8
. It is a compact, semisimple,
21-dimensional Lie group, a subgroup of SO(8).
A Spin(7)-structure on an 8-manifold M gives rise
to a 4-form and a metric g on M, such that each
tangent space of M admits an isomorphism with R
8
identifying and g with
0
and g
0
, respectively. By
an abuse of notation, the pair (, g) is referred to as
a Spin(7)-structure.
Proposition 9 Let M be an 8-manifold and (, g) a
Spin(7)-structure on M. Then the following are
equivalent:
(i) Hol(g) Spin(7) and is the induced 4-form;
(ii) r=0 on M, where r is the Levi-Civita
connection of g; and
(iii) d=0 on M.
We call r the torsion of the Spin(7)-structure
(, g), and ( , g) torsion free if r=0. A triple
(M,, g) is called a Spin(7)-manifold if M is an 8-
manifold and (, g) a torsion-free Spin(7)-structure
on M.Ifg has holonomy Hol(g) Spin(7), then g is
Ricci-flat.
Here is a result on compact 8-manifolds with
holonomy Spin(7).
Theorem 10 Let (M,
, g) be a compact Spin(7)-
manifold. Then, Hol(g) = Spin(7) if and only if M is
simply connected, and b
3
(M) þ b
4
þ
(M) = b
2
(M) þ
2b
4
(M) þ 25. In this case, the moduli space of
metrics with holonomy Spin(7) on M, up to
diffeomorphisms isotopic to the identity, is a smooth
manifold of dimension 1 þ b
4
(M).
The inclusions between the holonomy groups
SU(m), G
2
, Spin(7) are
SUð2Þ!SUð3Þ! G
2
###
SUð2ÞSUð2Þ!SUð4Þ!Spinð7 Þ
½7
The meaning of the above equation is illustrated
by using the inclusion SU(3) ,!G
2
.AsSU(3)acts
on C
3
,italsoactsonR C
3
ffi R
7
,takingthe
SU(3)-actio n on R to be trivial. Thus, we embed
SU(3) as a subgroup of GL(7,R). It turns out
that SU(3) is contained in the subgroup G
2
of
GL(7, R) defined in the section ‘‘The holonomy
group G
2
.’’
Constructing Compact G
2
- and Spin(7)-Manifolds
The author’s method of constructing compact
7-manifolds with holonomy G
2
is based on the
444 Riemannian Holonomy Groups and Exceptional Holonomy
Kummer construction for Calabi–Yau metrics
on the K3 surface and may be divided into four
steps.
Step 1. Let T
7
be the 7-torus and (’
0
, g
0
) a flat
G
2
-structure on T
7
. Choose a finite group of
isometries of T
7
preserving (’
0
, g
0
). Then the quotient
T
7
= is a singular, compact 7-manifold, an orbifold.
Step 2. For certain special groups , there is a
method to resolve the singularities of T
7
= in a natural
way, using complex geometry. We get a nonsingular,
compact 7-manifold M, together with a map : M !
T
7
=, the resolving map.
Step 3. On M, we explicitly write down a one-
parameter family of G
2
-structures (’
t
, g
t
) depending
on t 2 (0, ). They are not torsion free, but have
small torsion when t is small. As t !0, the
G
2
-structure (’
t
, g
t
) converges to the singular
G
2
-structure
(’
0
, g
0
).
Step 4. We prove using analysis that for suffi-
ciently small t, the G
2
-structure (’
t
, g
t
)onM, with
small torsion, can be deformed to a G
2
-structure
(
’
’
t
,
˜
g
t
), with zero torsion. Finally, it is shown that
˜
g
t
is a metric with holonomy G
2
on the compact
7-manifold M.
We explain the first two steps in greater detail.
For Step 1, an example of a suitable group is given
here.
Example 11 Let (x
1
, ..., x
7
) be coordinates on
T
7
= R
7
=Z
7
, where x
i
2 R=Z. Let (’
0
, g
0
) be the
flat G
2
-structure on T
7
defined by [5]. Let , , and
be the involutions of T
7
defined by
: ðx
1
; ...; x
7
Þ
7!ðx
1
; x
2
; x
3
; x
4
; x
5
; x
6
; x
7
Þ½8
: ðx
1
; ...; x
7
Þ
7!ðx
1
; x
2
; x
3
; x
4
; x
5
;
1
2
x
6
; x
7
Þ½9
: ðx
1
; ...; x
7
Þ
7!x
1
; x
2
; x
3
; x
4
;
1
2
x
5
; x
6
;
1
2
x
7
½10
By inspection, , , and preserve (’
0
, g
0
),
because of the careful choice of exactly which signs
to change. Also,
2
=
2
=
2
= 1, and , , and
commute. Thus, they generate a group
=h, , iffiZ
3
2
of isometries of T
7
preserving
the flat G
2
-structure (’
0
, g
0
).
Having chosen a lattice and finite group , the
quotient T
7
= is an orbifold, a singular manifold
with only quotient singularities. The singularities of
T
7
= come from the fixed points of nonidentity
elements of . We now describe the singularities in
the example.
Lemma 12 In Example 11, , , , and
have no fixed points on T
7
. The fixed points of
, , are each 16 copies of T
3
. The singular set S of
T
7
= is a disjoint union of 12 copies of T
3
,4copies
from each of , , . Each component of S is a
singularity modeled on that of T
3
C
2
={1}.
The most important consideration in choosing
is that we should be able to resolve the singula-
rities of T
7
= within holonomy G
2
,inStep2.We
have no idea how to resolve general orbifold
singularities of G
2
-manifolds. However, after fifty
years of hard work we understand well how to
resolve orbifold singularities of C alabi–Yau mani-
folds, with holonomy SU( m). This is done by a
combination of algebraic geometry, which pro-
duces the underlying complex manifold by a
crepant resolution, and Calabi–Yau analysis,
which produces the Ricci-flat Ka¨hler metric on
this complex manifold.
Now the holonomy groups SU(2) and SU(3) are
subgroups of G
2
,asin[7]. Our tactic in Step 2 is to
ensure that all of the singular set S of T
7
= can
locally be resolved with holonomy SU(2) or SU(3),
and then use Calabi–Yau geometry to do this. In
particular, suppose each connected component of S
is isomorphic to either
1. T
3
C
2
=G, for G a finite subgroup of SU(2); or
2. S
1
C
3
=G, for G a finite subgroup of SU(3)
acting freely on C
3
n{0}.
One can use complex algebraic geometry to find a
crepant resolution X of C
2
=G or Y of C
3
=G. Then
T
3
X or S
1
Y gives a local model for how to
resolve the corresponding component of S in T
7
=.
Thus we construct a nonsingular, compact 7-mani-
fold M by using the patches T
3
X or S
1
Y to
repair the singularities of T
7
=. In the case of
Example 11, this means gluing 12 copies of T
3
X
into T
7
=, where X is the blow-up of C
2
={1} at its
singular point.
By considering different groups acting on T
7
,
and also b y finding topologically distinct resolu-
tions M
1
, ..., M
k
of the same orbifold T
7
=,we
can construct many compact Riemannian 7-mani-
folds with holonomy G
2
. A good number of
examples are given in Joyce (2000, chap ter 12).
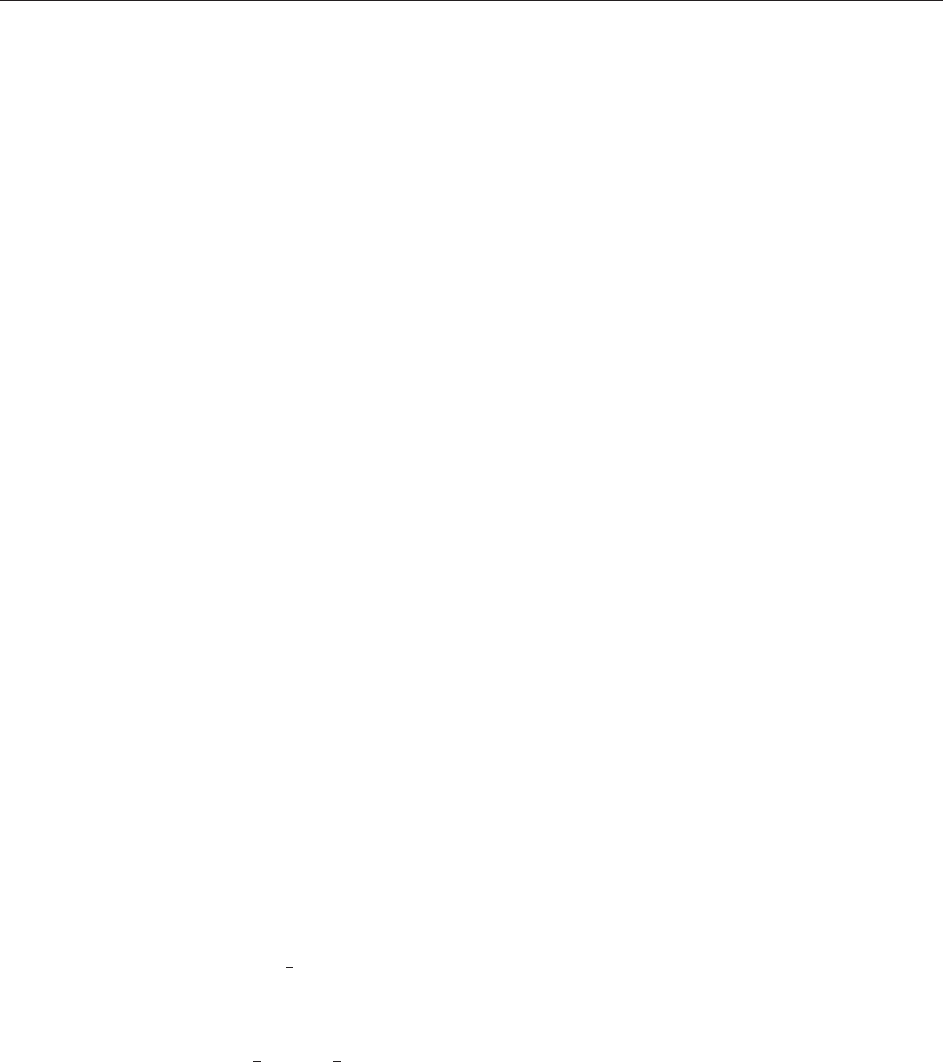
Figure 1 displays the 252 different sets of Betti
numbers of compact, s imply con nected 7-mani-
folds with holonomy G
2
constructed there
together with 5 more sets from Kovalev. It
seems likely to the author that the Betti numbers
given in Figure 1 are o nly a small propor tion of
Riemannian Holonomy Groups and Exceptional Holonomy 445
the Betti numbers of all compact 7-manifolds with
holonomy G
2
.
A different construction of compact 7-manifolds
with holonomy G
2
was given by Kovalev (2003),
involving gluing together a symptotically cylindrical
Calabi–Yau 3-folds. Compact 8-manifolds with
holonomy Spin(7) were constructed by the author
using two different methods: first, by resolving
singularities of torus orbifolds T
8
= in a similar way
to the G
2
case (though the details are different and
more difficult), and second, by resolving Y=hi for Y
a Calabi–Yau 4-orbifold with singularities of a
special kind, and an antiholomorphic isometric
involution of Y. Details can be found in Joyce (2000).
See also: Calibrated Geometry and Special Lagrangian
Submanifolds.
Further Reading
Bryant RL (1987) Metrics with exceptional holonomy. Annals of
Mathematics 126: 525–576.
Bryant RL and Salamon SM (1989) On the construction of some
complete metrics with exceptional holonomy. Duke Mathe-
matical Journal 58: 829–850.
Gross M, Huybrechts D, and Joyce D (2003) Calabi–Yau
Manifolds and Related Geometries, Universitext Series.
Berlin: Springer.
Joyce DD (2002) Constructing compact manifolds with excep-
tional holonomy, math.DG/0203158, 2002 (a survey paper).
Joyce DD (2004) Constructing compact manifolds with exceptional
holonomy. In: Douglas M, Gauntlett J, and Gross M (eds.)
Strings and Geometry, Clay Mathematics Proceedings 3.
pp. 177–191. Providence, RI: American Mathematical Society.
math.DG/0203158.
Kovalev AG (2003) Twisted connected sums and special
Riemannian holonomy. Journal fu¨ r die Reine und Angewandte
Mathematik 565: 125–160, math.DG/0012189.
0 20 40 60 80 100 120 140 160 180 200
0
5
10
15
20
25
b
3
(M )
b
2
(M )
Figure 1 Betti numbers (b
2
, b
3
) of compact G
2
-manifolds. (From Joyce (2000) and Kovalev (2003).)
446 Riemannian Holonomy Groups and Exceptional Holonomy
S
Saddle Point Problems
M Schechter, University of California at Irvine,
Irvine, CA, USA
ª 2006 Elsevier Ltd. All rights reserved.
Introduction
Many prob lems arising in science and engineering
call for the solving of the Euler equations of
functionals, that is, equations of the form
G
0
ðuÞ¼0 ½ 1
where G(u)isaC
1
-functional (usually representing
the energy) arising from the given data. As an
illustration, the equation
uðxÞ¼f ðx; uðxÞÞ
is the Euler equation of the functional
GðuÞ¼
1
2
kruk
2
Z
Fðx; uðxÞÞdx
on an appropriate space, where
Fðx; tÞ¼
Z
t
0
f ðx; sÞds ½2
and the norm is that of L
2
. The solving of the Euler
equations is tantamount to finding critical points of
the corresponding functional. The classical approach
was to look for maxima or minima. If one is looking
for a minimum, it is not sufficient to know that the
functional is bounded from below, as is easily
checked. However, one can show that there is a
sequence satisfying
Gðu
k
Þ!a; G
0
ðu
k
Þ!0 ½3
for a = inf G. If the sequence has a converg ent
subsequence, this will produce a minimum.
However, when extrema do not exist, there is no
clear way of obtaining critical points. In particular,
this happens when the functional is not bounded
from either above or below. Until recently, there
was no organized procedure for producing critical
points which are not extre ma. We shall describe an
approach which is very useful in such cases.
To illustrate the technique, we consider the
problem of finding a solution of
u
00
ðxÞþuðxÞ¼f ðx; uðxÞÞ ½4
x 2 I = [0, 2], under the conditions
uð0Þ¼uð2Þ; u
0
ð0Þ¼u
0
ð2Þ½5
We assume that the function f(x, t) is con tinuous in
I R and is periodic in x with period 2. The
approach begins by asking the question, ‘‘does there
exist a differentiable function G from a space H to
R such that [4], [5] are equivalent to [1]?’’ It is
hoped that one can mimic the methods of calculus to
find critical points and thus solve [1].
Actually, we are asking the following: does there exist
a mapping G from a space H to R such that G has a
critical point u satisfying G
0
(u) = u
00
þ u f (x, u(x))?
In order to solve the problem one has to
1. find G(u) such that
ðG
0
ðuÞ; vÞ
H
¼ðu; vÞ
H
ðf ð; uÞ; vÞ½6
holds for each u, v 2 H,
2. show that there is a function u(x) such that
G
0
(u) = 0,
3. show that u
00
exists in I,
4. show that [1] implies [4].
We used the notation
ðu; vÞ¼
Z
2
0
uðxÞvðxÞdx
In order to carry out the procedure, we assume
that for each R > 0 there is a constant C
R
such that
jf ðx; tÞj C
R
; x 2 I; t 2 R; jtjR ½7
This assumption is used to carry out step (1). We define
GðuÞ¼
1
2
kuk
2
H
Z
2
0
Fðx; uðxÞÞdx ½8
where F(x, t) is given by [2] and we take H to be the
completion of C
1
(I) with respect to the norm
kuk
H
¼ðku
0
k
2
þkuk
2
Þ
1=2
½9
where kuk
2
= (u, u). We have

Theorem 1 If f(x, t) satisfies [7], then G(u) given
by [8] is continuously differe ntiable and satisfies [6].
Once we have reduced the problem to solving [1],
we can search for critical points. The easiest type to
locate are ‘‘saddle points’’ which are local minima in
some directions and local maxima in all others. For
instance, we obtain theorems such as
Theorem 2 Assume that
jf ðx ; tÞj Cðjtjþ1Þ; x 2 I; t 2 R
2Fðx; tÞ=t
2
! ðxÞ a.e. as jtj!1
½10
with (x) satisfying
1 þ n
2
ðxÞ1 þðn þ 1Þ
2
1 þ n
2
6 ðxÞ 6 1 þðn þ 1Þ
2
½11
and n an integer 0. If G(u) is give n by [8], then
there is a u
0
2 H such that
G
0
ðu
0
Þ¼0 ½12
In particular, u
0
is a solution of [4] and [5] in the
usual sense.
In proving this theorem, we shall make use of
Theorem 3 Let M, N be closed subspaces of a
Hilbert space E such that M = N
?
. Assume that at
least one of these subspaces is finite dimensional.
Let G be a continuously differentiable functional on
E satisfying
m
0
¼ sup
v2N
inf
w2M
Gðv þ wÞ 6¼1 ½13
and
m
1
¼ inf
w2M
sup
v2N
Gðv þ wÞ 6¼1 ½14
Then there is a sequence {u
k
} E such that
Gðu
k
Þ!c; m
0
c m
1
; G
0
ðu
k
Þ!0 ½15
Theorem 3 allows us to obtain solutions if we can
find subspaces of H such that [13] and [14] hold. We
useittogivetheproofofTheorem 2.
Proof. Note that
kuk
2
H
¼
X
ð1 þ k
2
Þj
k
j
2
; u 2 H ½16
where the
k
are given by
k
¼ðu;
’
k
Þ; k ¼ 0; 1; 2; ... ½17
and
’
k
ðxÞ¼
1
ffiffiffiffiffiffi
2
p
e
ikx
; k ¼ 0; 1; 2; ... ½18
Let
N ¼fu 2 H :
k
¼ 0 for jkj > ng
Thus,
kuk
2
H
¼
X
jkjn
ð1 þ k
2
Þj
k
j
2
ð1 þ n
2
Þkuk
2
; u 2 N ½19
Let
M ¼fu 2 H :
k
¼ 0 for jkjng
In this case,
kuk
2
H
¼
X
jkjnþ1
ð1 þ k
2
Þj
k
j
2
ð1 þðn þ 1Þ
2
Þkuk
2
; u 2 M ½ 20
Note that M, N are closed subspaces of H and that
M = N
?
. Note also that N is finite dimensional. If
we consider the functional [8], it is not difficult to
show that [11] implies
inf
M
G > 1; sup
N
G < 1½21
We are now in a position to apply Theorem 3. This
produces a saddle point satisfying [1].
&
Minimax
Theorem 3 is very useful when extrema do not exist, but
it is not always applicable. One is then forced to search
for other ways of obtaining critical points. Again, one is
faced with the fact that there is no systematic method of
finding them. A useful idea is to try to find sets that
separate the functional. By this we mean the following:
Definition 1 Two sets A, B separate the functional
G(u)if
a
0
:¼ sup
A
G b
0
:¼ inf
B
G ½22
We would like to find sets A and B such that [22]
will imply
9u : GðuÞb
0
; G
0
ðuÞ¼0 ½23
This is too much to expect since even semibounded-
ness does not imply the existence of an extremum.
Consequently, we weaken our requirements and
look for sets A, B such that [22] implies
Gðu
k
Þ!a; G
0
ðu
k
Þ!0 ½24
with a b
0
. This leads to
Definition 2 We shall say that the set A links the
set B if [22] implies [24] with a b
0
for every C
1
functional G(u).
448 Saddle Point Problems

Of course, [24] is a far cry from [23], but if, for
example, the sequence [24] has a convergent
subsequence, then [24] implies [23]. Whether or
not [24] implies [23] is a property of the functional
G(u). We state this as
Definition 3 We say that G(u) satisfies the Palais–
Smale (PS) condition if [24] always implies [23].
The usual way of verifying this is to show that
every sequence satisfying [24] has a convergent
subsequence (there are other ways).
All of this leads to
Theorem 4 If G satisfies the PS condition and is
separated by a pair of linking sets, then it has a
critical point satisfying [23].
This theorem cannot be applied until one knows if
there are linking sets and functionals that satisfy the
PS condition. Fortunately, they exist. Examples and
sufficient conditions for A to link B are found in the
literature. Obviously, the weaker the conditions, the
more pa irs will qualify. To date, the conditions
described in the next section allow all known
examples.
The Details
Let E be a Banach space, and let be the set of all
continuous maps =(t) from E [0, 1] to E such
that
1. (0) = I, the identity map;
2. for each t 2 [0, 1), (t) is a homeomorphism of E
onto E and
1
(t) 2 C(E [0, 1), E);
3. (1)E is a single point in E and (t)A converges
uniformly to (1)E as t ! 1 for each bounded
set A E; and
4. for each t
0
2 [0, 1) and each bounded set A E,
sup
0tt
0
;u2A
fkðtÞukþk
1
ðtÞukg < 1½25
We have the following
Theorem 5 A sufficient condition for A to link B is
(i) A \ B = and
(ii) for each 2 there is a t 2 (0, 1] such that
ðtÞA \ B 6¼
Theorem 6 Let G be a C
1
-functional on E, and let
A, B be subsets of E such that A, B satisfy [22] and
the hypotheses of Theorem 5. Assume that
a :¼ inf
2
sup
0s1;u2A
GððsÞuÞ½26
is finite. Let (t) be a positive, locally Lipschitz
continuous function on [0, 1) such that
Z
1
0
ðrÞdr ¼1 ½27
Then there is a sequence {u
k
} E such that
Gðu
k
Þ!a; G
0
ðu
k
Þ= ðku
k
kÞ ! 0 ½28
If a = b
0
, then we can also require that
dðu
k
; BÞ!0 ½29
Corollary 1 Under the hypotheses of Theorem 6
there is a sequence {u
k
} E such that
Gðu
k
Þ!a; ð1 þku
k
kÞG
0
ðu
k
Þ!0 ½30
Proof. We merely take (u) = 1=(1 þkuk)in
Theorem 6.
&
A useful criterion for finding linking subsets is
Theorem 7 Let F be a continuous map from a
Banach space E to R
n
, and let Q E be such that
F
0
= Fj
Q
is a homeomorphism of Q onto the closure
of a bounded open subset of R
n
. If p 2 , then
F
1
0
(@) links F
1
(p).
Some Examples
The following are examples of sets that link.
Example 1 Let M, N be closed subspaces such that
E = M N (with one finite dimensional). Let
B
R
¼fu 2 E : kuk < Rg
and take A = @B
R
\ N, B = M. Then A links B.
To see this, we identify N with some R
n
and take
=B
R
\ N, Q =
. For u 2 E, we write
u ¼ v þ w; v 2 N; w 2 M ½31
and take F to be the projection
Fu ¼ v
Since Fj
Q
= I and M = F
1
(0), we see from Theorem 7
that A links B.
Example 2 We take M, N as in Example 1.Let
w
0
6¼ 0 be an element of M, and take
A ¼fv 2 N : kv kRg
[fsw
0
þ v : v 2 N; s 0; ksw
0
þ vk¼Rg
B ¼@B
\ M; 0 <<R:
Then A links B. Again we ident ify N with some R
n
,
and we may assume kw
0
k= 1. Let
Q ¼fsw
0
þ v : v 2 N; s 0; ksw
0
þ vkRg
Saddle Point Problems 449

Then A = @Q in R
nþ1
.Ifu is given by [31],we
define
Fu ¼ v þkwkw
0
Then Fj
Q
= I and B = F
1
(w
0
). We can now apply
Theorem 7 to conclude that A links B.
Example 3 Take M, N as before and let v
0
6¼ 0be
an element of N. We write N = {v
0
} N
0
. We take
A ¼fv
0
2 N
0
: kv
0
kRg
[fsv
0
þ v
0
: v
0
2 N
0
; s 0; ksv
0
þ v
0
k¼Rg
B ¼fw 2 M : kwkg
[fsv
0
þ w : w 2 M; s 0; ksv
0
þ wk¼g
where 0 <<R.ThenA links B.Toseethis,welet
Q ¼fsv
0
þ v
0
: v
0
2 N
0
; s 0; ksv
0
þ v
0
kRg
and reason as before. For simplicity, we assume that
kv
0
k= 1, E is a Hilber t space and that the splitting
E = N
0
{v
0
} M is orthogonal. If
u ¼ v
0
þ w þ sv
0
; v
0
2 N
0
; w 2 M; s 2 R ½32
we define
FðuÞ¼v
0
þ s þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
2
kwk
2
q
v
0
; kwk
¼ v
0
þðs þ Þv
0
; kwk >
Note that Fj
Q
= I while F
1
(v
0
) is precisely the set
B. Hence we can conclude via Theorem 7 that A
links B.
Example 4 This is the same as Example 3 with A
replaced by A = @B
R
\ N. The proof is the same
with Q replaced by Q =
B
R
\ N.
Example 5 Let M, N be as in Example 1. Take
A = @B
\ N, and let v
0
be any element in @B
1
\ N.
Take B to be the set of all u of the form
u ¼ w þ sv
0
; w 2 M
satisfying any of the following:
(i) kwkR, s = 0,
(ii) kwkR, s = 2R
0
, and
(iii) kwk= R,0 s 2R
0
where 0 <<min (R, R
0
). Then A links B. To see
this, take N = {v
0
} N
0
. Then any u 2 E can be
written in the form [32]. Define
FðuÞ¼v
0
þ R
0
max
R
0
R
kwk; js R
0
j
v
0
and Q =
B
\ N. Again we may ident ify N with
some R
n
. Then F 2 C(E, N) and Fj
Q
= I. Moreover,
A = F
1
(0). Hence, A links B by Theorem 7.
Example 6 Let M, N be as in Example 1. Let v
0
be in @B
1
\ N and write N = {v
0
} N
0
. Let
A = @B
\ N, Q =
B
\ N, and
B ¼fw 2 M : kwkRg
[fw þ sv
0
: w 2 M; s 0; kw þ sv
0
k¼Rg
where 0 <<R. Then A links B. To see this, write
u = w þ v
0
þ sv
0
, w 2 M, v
0
2 N
0
, s 2 R and take
FðuÞ¼ðcR maxfckw þ sv
0
k; jcR sjgÞv
0
þ v
0
where c = =(R ). Then F is the identity operator
on Q, and F
1
(0) = B. Apply Theorem 7.
Some Applications
Many elliptic semilinear problems can be described
in the following way. Let be a domain in R
n
, and
let A be a self-adjoint operator on L
2
(). We assume
that A
0
> 0 and that
C
1
0
ðÞD :¼ DðA
1=2
ÞH
m; 2
ðÞ½33
for some m > 0, wher e C
1
0
() denotes the set of test
functions in (i.e., infinitely differentiable functions
with compact supports in ), and H
m,2
() denotes
the Sobolev space. If m is an integer, the norm in
H
m,2
() is given by
kuk
m; 2
:¼
X
jjm
kD
uk
2
0
@
1
A
1=2
½34
Here D
represents the generic derivative of order
jj and the norm on the right-hand side of [34] is
that of L
2
(). We shall not assume that m is an
integer.
Let q be any number satisfying
2 q 2n=ðn 2mÞ; 2m < n
2 q < 1; n 2m
and let f (x, t) be a continuous function on R.
We make the following assumptions.
Assumption A The function f (x, t) satisfies
jf ðx; tÞj V
0
ðxÞ
q
jtj
q1
þ V
0
ðxÞW
0
ðxÞ½35
and
f ðx; tÞ=V
0
ðxÞ
q
¼ oðjtj
q1
Þ as jtj!1 ½36
where V
0
(x) > 0 is a function in L
q
() such that
kV
0
uk
q
Ckuk
D
; u 2 D ½37
450 Saddle Point Problems

and W
0
is a function in L
q
0
(). Here
kuk
q
:¼
Z
juðxÞj
q
dx
1=q
½38
kuk
D
:¼kA
1=2
uk½39
and q
0
= q=(q 1). With the norm [39], D becomes
a Hilbert space. Define G and F by [8] and [2].It
follows that G is a continuously differentiable
functional on the whole of D.
We assume further that
Hðx; tÞ¼2Fðx; tÞtf ðx; tÞ
W
1
ðxÞ2L
1
ðÞ; x 2 ; t 2 R ½40
and
Hðx; tÞ!1 a:e: as jtj!1 ½41
Moreover, we assume that there are functions
V(x), W(x) 2 L
2
() such that multiplication by
V(x) is a compact operator from D to L
2
() and
Fðx; tÞCðVðxÞ
2
jtj
2
þ VðxÞWðxÞjtjÞ ½42
We wish to obtain a solution of
Au ¼ f ðx; uÞ; u 2 D ½43
By a solution of [43] we shall mean a function u 2 D
such that
ðu; vÞ
D
¼ðf ð; uÞ; vÞ; v 2 D ½44
If f (x, u)isinL
2
(), then a solution of [44] is in D(A)
and solves [43] in the classical sense. Otherwise we call
it a weak or semistrong solution. We have
Theorem 8 Let A be a self-adjoint operator in
L
2
() such that A
0
> 0 and [33] holds for some
m > 0. Assume that
0
is an eigenvalue of A with
eigenfunction ’
0
. Assume also
2Fðx; tÞ
0
t
2
; jtj for some >0 ½45
and
2Fðx; tÞ
0
t
2
W
0
ðxÞ; t > 0; x 2 ½46
where W
0
2 L
1
(). Assume that f ( x, t) satisfies [35],
[36], [40], [41],and[42]. Then [43] has a solution
u 6¼ 0.
Proof. Under the hypotheses of the theorem, it
is know n that the following alternative holds: either
(i) there is an infinite number of y(x) 2 D(A)n{0}
such that
Ay ¼ f ðx; yÞ¼
0
y ½47
or
(ii) for each >0 sufficiently small, there is an ">0
such that
GðuÞ"; kuk
D
¼ ½48
We may assume that option (ii) holds, for otherwise
we are done. By [46] we have
GðR’
0
ÞR
2
ðk’
0
k
2
D
0
k’
0
k
2
Þþ
Z
W
0
ðxÞdx
¼
Z
W
0
ðxÞdx
By Theorem 6, there is a sequence satisfying [28].
Taking (r) = 1=(r þ 1), we conclude that there is a
sequence {u
k
} D such that
Gðu
k
Þ!c; m
0
c m
1
;
ð1 þku
k
k
D
ÞG
0
ðu
k
Þ!0 ½49
In particular, we have
ku
k
k
2
D
2
Z
Fðx; u
k
Þdx ! c ½50
and
ku
k
k
2
D
ðf ð; x
k
Þ; u
k
Þ!0 ½51
Consequently,
Z
Hðx; u
k
Þdx !c ½52
These imply
Z
Hðx; u
k
Þdx K ½53
If
k
= ku
k
k
D
!1, let
~
u
k
= u
k
=
k
. Then k
~
u
k
k
D
= 1.
Consequently, there is a renamed subsequence such
that
~
u
k
!
~
u weakly in D, strongly in L
2
(), and a.e.
in . We have from [42]
1 ðm
1
þ Þ=
2
k
þ 2C
Z
fVðxÞ
2
~
u
2
k
þ VðxÞWðxÞj
~
u
k
j
1
k
gdx
Consequently,
1 2C
Z
VðxÞ
2
~
u
2
dx ½54
This shows that
~
u 6 0. Let
0
be the subset of on
which
~
u 6¼ 0. Then
ju
k
ðxÞj ¼
k
j
~
u
k
ðxÞj ! 1; x 2
0
½55
Saddle Point Problems 451