Francoise J.-P., Naber G.L., Tsun T.S. (editors) Encyclopedia of Mathematical Physics
Подождите немного. Документ загружается.


which acts on the Siegel space H
g
by
M ¼
AB
CD
: 7!ðA þ BÞðC þ DÞ
1
Here A, ..., D are g g blocks .
The rows of the matrix define a rank-2g lattice
L
in C
g
and the Jacobian of C is the torus
JðCÞ¼C
g
=L
More intrinsically, one can define J(C) as follow s.
Let H
0
(C, !
C
) be the space of holom orphic differ-
ential forms on C. Then, integration over cycles
defines a monomorphism
H
1
ðC; ZÞ!H
0
ðC;!
C
Þ
7!
Z
and
JðC Þ¼H
0
ðC;!
C
Þ
=H
1
ðC; ZÞ
For a fixed base point P
0
2 C, the Abel–Jacobi
map is defined by
u : C ! JðCÞ
P 7!
Z
P
P
0
!
1
; ...;
Z
P
P
0
!
g
Here, the integration is taken over some path
from P
0
to P. Obviously, the integral dep ends on
the choice of this path, but since J(C)was
obtained by dividing ou t the periods given by
integrating over a basis of H
1
(C, Z), the map is
well defined.
Let C
d
be the dth Cartesian product of C, that is,
the set of all ordered d-tuples (P
1
, ..., P
d
). Then, u
defines a map
u
d
: C
d
! JðCÞ
ðP
1
; ...; P
d
Þ7!uðP
1
ÞþþuðP
d
Þ
where þ is the usual addition on the torus J(C).
If d = g 1, then
¼ Imðu
g1
ÞJðCÞ
is a hypersurface (i.e., has codimension 1 in J(C))
and is called a theta divisor. A different choice of the
base point P
0
results in a trans lation of the theta
divisor. Using the theta divisor, one can show that
J(C) is an abelian variety, that is, J(C) can be
embedded into some projective space P
n
C
. The pair
(J(C), ) is a principally polarized abelian variety
and Torelli’s theorem states that C can be
reconstructed from its Jacobian J(C) and the theta
divisor .
Divisors, Linear Systems,
and Line Bundles
A divisor D on C is a formal sum
D ¼ n
1
P
1
þþn
k
P
k
; P
i
2 C; n
i
2 Z
The degree of D is defined as
deg D ¼ n
1
þþn
k
and D is called ‘‘effective’’ if all n
i
0. Every
meromorphic function f 6¼ 0 defines a divisor
ðf Þ¼f
0
f
1
where f
0
are the zeros of f and f
1
the poles (each
counted with multiplicity). Divisors of the form (f )are
called principal divisors and the degree of any principal
divisor is 0 (see the next section). Two divisors D
1
and
D
2
are called linearly equivalent (D
1
D
2
)iftheir
difference is a principal divisor, that is,
D
1
D
2
¼ðf Þ
for some meromorphic function f 6¼ 0. This defines
an equivalence relation on the group Div(C) of all
divisors on C. Since principal divisors have degree 0,
the notion of degree also makes sense for classes of
linearly equivalent divisors. We define the divisor
class group of C by
ClðCÞ¼DivðCÞ=
The degree map defines an exact sequence
0 ! Cl
0
ðCÞ!ClðCÞ
deg
!
Z ! 0
where Cl
0
(C) is the subgroup of Cl(C) of divisor
classes of degree 0.
Let C
d
be the set of unordered d-tuples of points
on C, that is,
C
d
¼ C
d
=S
d
where the symmetric group S
d
acts on the Cartesian
product C
d
by permutation. This is again a smooth
projective variety and the Abel–Jacobi map
u
d
: C
d
! J(C) clearly factors through a map
u
d
: C
d
! JðCÞ
The fibers of this map are of particular interest.
Theorem 2 (Abel). Two effective divisors D
1
and
D
2
on C of the same degree d are linearly equivalent
if and only if u
d
(D
1
) = u
d
(D
2
).
One normally denotes the inverse image of u
d
(D)by
jDj¼u
1
d
ðu
d
ðDÞÞ ¼ D
0
; D
0
0; D
0
D
fg
Note that the latter description also makes sense if
D itself is not necessarily effective. One calls jDj the
422 Riemann Surfaces
complete linear system defined by the divisor D.If
deg D < 0, then automatically jDj= ;, but the
converse is not necessarily true. Let M
C
be the
field of meromorphic (or equivalently rational)
functions on C. Then, one defines
LðDÞ¼ f 2M
C
; ðf ÞD
fg
This is a C-vector space and it is not difficult to see
that L(D) has finite dimension. To every function
0 6¼ f 2 L(D), one can associate the effective divisor
D
f
¼ðf ÞþD 0
Clearly, D
f
D and every effective divisor with this
property arises in this way. This gives a bijection
PðLðDÞÞ ¼ jDj
showing that the complete linear system jDj has the
structure of a projective space. A linear system is a
projective subspace of some complete linear system jDj.
Clearly, the map u
d
: C
d
! J(C) can be extended
to the set Div
d
(C) of degree d divisors and Abel’s
theorem then states that this map factors through
Cl
d
(C), that is, that we have a commutative diagram
Div
d
(C )Cl
d
(C )
J(C
)
u
d
u
d
where u
d
is injective.
Theorem 3 (Jacobi’s Inversion Theorem). The
map u
d
is surjective and hence induces an isomorphism
u
d
: Cl
d
ðCÞffiJðCÞ
It should be noted that the definition of the maps
u
d
depends on the choice of a base point P
0
2 C.
Hence, the maps
u
d
are not canonical, with the
exception of the isomorphism
u
0
:Cl
0
(C) ffi J(C)
where the choice of P
0
drops out.
The concepts of divisors and linear systems can be
rephrased in the language of line bundles. A (holo-
morphic) vector bundle on a complex manifold M is a
complex manifold E together with a projection
p : E ! M which is a locally trivial C
r
-bundle. This
means that an open covering (U
)
2A
of M and local
trivializations
p
–1
(U
α
)
U
α
×
C
r
U
α
p
α
p
r
U
α
≅ p
α
exist, such that the transition maps
’
’
1
j
ðU
\U
ÞC
r
:
ðU
\ U
ÞC
r
!ðU
\ U
ÞC
r
are fiberwise linear isomorphisms. If M is connected,
then r is constant and is called the rank of the vector
bundle. A line bundle is simply a rank-1 vector bundle.
Alternatively, one can view vector bundles as
locally free O
M
-modules, where O
M
denotes the
structure sheaf of holomorphic (or in the algebro-
geometric setting regular) functions on M.An
O
M
-module E is called locally free of rank r,ifan
open covering (U
)
2A
of M exists such that Ej
U
ffi
O
r
U
. The transition functions of a locally free sheaf
can be used to define a vector bundle and vice versa,
and hence the concepts of vector bundles and locally
free sheaves can be used interchangeably. The open
coverings U
can be viewed either in the complex
topology, or, if M is an algebraic variety, in
the Zariski topology, thus leading to either holo-
morphic vector bundles (locally free sheaves in the
C-topology) or algebraic vector bundles (locally free
sheaves in the Zariski topology). Clearly, every
algebraic vector bundle defines a holomorph ic
vector bundle. Conversely, on a projective variety
M, Serre’s GAGA theorem (ge´ome´trie alge´briques et
ge´ome´trie analytique), a vast generalization of
Chow’s theorem, states that there exists a bijection
between the equivalence classes of algebraic and
holomorphic vector bundles (locally free sheaves).
The Picard group Pic M is the set of all isomorph-
ism classes of line bundles on M. The tensor product
defines a group structure on Pic M where the neutral
element is the trivial line bundle O
M
and the inverse
of a line bundle L is its dual bundle L
, which is also
denoted by L
1
. For this reason, locally free sheaves
of rank 1 are also called invertible sheaves.
We now return to the case of a compact Riemann
surface (algebraic curve) C. The concept of line
bundles and divisors can be trans lated into each
other. If D =
P
n
i
P
i
is a divisor on C and U an open
set, then we denote by D
U
the restriction of D to U,
that is, the divisor consisting of all points P
i
2 U
with multiplicity n
i
. One then defines a locally free
sheaf (line bundle) L(D)by
LðDÞðUÞ¼ f 2M
C
ðUÞ; ðf ÞD
U
fg
To see that this is locally free, it is enough to
consider for each point P
i
a neighborhood U
i
on
which a holomorphic function t
i
exists, which
vanishes only at P
i
and there of order 1 (i.e., it is a
local parameter near the point P
i
). Then,
LðDÞðU
i
Þ¼t
n
i
i
O
U
i
ffiO
U
i
This correspondence defines a map
Div C ! Pic C
D 7!LðDÞ
Riemann Surfaces 423

It is not hard to show that:
1. every line bundle L2Pic C is of the form L=
L(D) for some divisor D on the curve C;
2. D
1
D
2
() L (D
1
) ffiL(D
2
);
3. L(D
1
) L(D
2
) ffiL(D
1
þ D
2
); and
4. L(D) ffiL(D)
1
.
Hence, there is an isomorphism of abelian groups
ClðCÞffiPic C
This correspondence allows to define the degree of a
line bundle L. In the complex analytic setting this
can also be interpreted as follows. Let O
C
be the
sheaf of nowhere-vanishing functions. Using cocycles,
one easily identifies
H
1
ðC; O
C
ÞffiPic C
and the exponential sequence
0 ! Z !O
C
!
exp
O
C
! 0
induces an exact sequence
0 ! H
1
ðC; ZÞ!H
1
ðC; O
C
Þ
! H
1
ðC; O
C
Þ¼Pic C ! H
2
ðC; ZÞ
The last map in this exact sequence associates to
each line bundle L its first Chern class c
1
(L) 2
H
2
(C, Z) ffi Z, which can be identified with the
degree of L. Hence, the subgroup Pic
0
C of degree 0
line bundles on C is isomorphic to
Pic
0
C ffi H
1
ðC; O
C
Þ=H
1
ðC; ZÞ
Altogether there are identifications
Pic
0
C ffi Cl
0
C ffi JðCÞ
The Riemann–Roch Theorem
and Applications
For every divisor D on a compact Riemann surface C,
the discussion of the preceding section shows that there
is an identification of finite-dimensional vector spaces
LðDÞ¼H
0
ðC; LðD ÞÞ
where H
0
(C, L(D)) is the space of global sections of
the line bundle L(D). One defines
lðDÞ¼dim
C
LðDÞ
It is a crucial question in the theory of compact Riemann
surfaces to study the dimension l(D)asD varies.
The canonical bundle !
C
of C is defined as the dual
of the tangent bundle of C. Its global sections are
holomorphic 1-forms. Every divisor K
C
on C with
!
C
= L(K
C
) is called (a) canonical divisor. The
canonical divisors are the divisors of the meromorphic
1-forms on C, whereas the effective canonical divisors
correspond to the divisors of holomorphic 1-forms
(here, we simply write a 1-form locally as f (z)dz and
define a divisor by taking the zeros, resp. poles of f (z)).
By abuse of notation, we also denote the divisor class
corresponding to canonical divisors by K
C
. There is a
natural identification
PðH
0
ðC;!
C
ÞÞ ¼ jK
C
j
For a divisor D, the index of speciality is defined by
iðDÞ¼l ðK
C
DÞ¼dim
C
LðK
C
DÞ
The linear system jK
C
Dj is called the adjoint
system of jDj. A crucial role is played by the
Theorem 4 (Riemann–Roch). For any divisor D on a
compact Riemann surface C of genus g, the equality
lðDÞi ðDÞ¼deg D þ 1 g ½2
holds.
This can also be written in terms of line bundles.
If L is any line bundle, then we denote the
dimension of the space of global sect ions by
h
0
ðLÞ ¼ dim
C
H
0
ðC; LÞ
Then, the Riemann–Roch theorem can be written as
h
0
ðLÞ h
0
ð!
C
L
1
Þ¼deg Lþ1 g ½3
This can be written yet again in a different way, if
we use sheaf cohomology. By Serre dua lity, there is
an isomorphism of cohomology groups
H
1
ðC; LÞ ffi H
0
ðC;!
C
L
1
Þ
and hence if we set
h
1
ðLÞ¼ dim
C
H
1
ðC; LÞ
then [3] reads
h
0
ðLÞ h
1
ðLÞ ¼ deg Lþ1 g ½4
Whereas [2] is the classical formulation of the
Riemann–Roch theorem, formula [4] is the formula-
tion which is more suitable for genera lizations.
From this point of view, the classical Riemann–
Roch theorem is a combination of the cohomologi-
cal formulation [4] together with Serre duality.
The Riemann–Roch theorem has been vastly gen-
eralized. This was first achieved by Hirzebruch who
proved what is nowadays called the Hirzebruch–
Riemann–Roch theorem for vector bundles on projec-
tive manifolds. A further generalization is due to
Grothendieck, who proved a ‘‘relative’’ version invol-
ving maps between varieties. Nowadays, theorems like
the Hirzebruch–Riemann–Roch theorem can be
424 Riemann Surfaces

viewed as special cases of the Atiyah–Singer index
theorem for elliptic operators. The latter also contains
the Gauss–Bonnet theorem from differential geometry
as a special case. Moreover, Serre duality holds in
much greater generality, namely for coherent sheaves
on projective varieties.
Applying the Riemann–Roc h theorem [3] to the
zero divisor D = 0, resp. the trivial line bundle O
C
,
one obtains
h
0
ð!
C
Þ¼g ½5
that is, the number of independent global holo-
morphic 1-forms equals the genus of the curve C.
Similarly, for D = K
C
, resp. L= !
C
, we find from [3]
and [5] that
deg K
C
¼ 2g 2
These relations show, how the Riemann–Roch
theorem links analytic, resp. algebraic, invariants
with the topology of the curve C.
Finally, if deg D > 2g 2, then deg(K
C
D) < 0
and hence i(D) = l(K
C
D) = 0and[2] becomes
lðDÞ¼deg D þ 1 g if deg D > 2g 2
which is Riemann’s original version of the theorem.
Classically, linear series arose in the study of
projective embeddings of algebraic curves. For a
nonzero effective divisor
D ¼
X
k
i¼1
n
i
P
i
; n
i
> 0
the support of D is defined by
suppðDÞ¼ P
1
; ...; P
k
fg
A complete linear system jDj is called base point
free, if no point P exists which is in the support of
every divisor D
0
2jDj. This is the same as saying
that for every P 2 C a section s 2 H
0
(C, L(D)) exists
which does not vanish at P. Let jDj be base point
free and let s
0
, ..., s
n
2 H
0
(C, L(D)) be a basis of the
space of sections. Then, one obtains a map
’
jDj
: C ! PðH
0
ðC; LðD ÞÞÞ ¼ P
n
P 7!ðs
0
ðPÞ : ... : s
n
ðPÞÞ
The divisors D
0
2jDj are then exactly the pullbacks
of the hyperplanes H of P
n
under the map ’
jDj
. Note
that the map ’
jDj
as defined here depends on the
choice of the basis s
0
, ..., s
n
, but any two such
choices only differ by an automorphism of P
n
.We
say that jDj, resp. the associated line bundle
L= L(D), is very ample if ’
jDj
defines an
embedding. Using the Riemann– Roch theorem, it is
not difficult to prove:
Proposition 1 Let D be a divisor of degree d on the
curve C. Then
(i) jDj is base point free if d 2g and
(ii) jDj is very ample if d 2g þ 1.
If the genus g(C) 2, then one can prove that jK
C
j
is base point free and consider the canonical map
’
jK
C
j
: C ! P
g1
A curve C is called hyperelliptic if there exists a
surjective map f : C ! P
1
which is a covering of
degree 2. In genus 2 every curve is hyperelliptic,
whereas for genus g 3 hyperelliptic curves are
special. The connection with the canonical map is
given by
Theorem 5 (Clifford). Let C be a curve of genus
g 2. Then the canonical map is an embedding if
and only if C is not hyperelliptic.
We end this section by stating Hurwitz’s theorem:
Let f : C ! D be a surjective holomorphic map
between compact Riemann surfaces (if f is not
constant then it is automatically surjective). Then,
near a point P 2 C the map f is given in local
analytic coordinates by f (t) = t
n
P
and we call f
‘‘ramified’’ of order n
P
if n
P
> 1. The ramificat ion
divisor of f is defined as
R ¼
X
P2C
ðn
P
1ÞP
Note that this is a finite sum. If we define
f
ðQÞ¼
X
P2f
1
ðQÞ
n
P
P
then one can show that
deg f ¼ deg f
ðQÞ¼
X
P2f
1
ðQÞ
n
P
is independent of the point Q. This number is called
the degree of the map f. (This should not be
confused with the degree deg(f ) of the principal
divisor (f ) defined by f.) In fact, applying the above
equality to the map f : C ! P
1
associated to a
nonconstant meromorphic function f shows that
the degree of the principal divisor (f ) is zero, since
degðf Þ¼deg f
ð0Þdeg f
ð1Þ ¼ 0
Theorem 6 (Hurwitz). Let f : C ! D be a surjec-
tive holomorphic map between compact Riemann
surfaces of genus g(C) and g(D), respectively. Then,
2gðCÞ2 ¼ deg f ð2gðDÞ2 Þþdeg R
where R is the ramification divisor .
Riemann Surfaces 425

Brill–Noether Theory
In this section, we state the main results of Brill–
Noether theory. For a divisor D on a curve C we
denote by
rðDÞ¼lðDÞ1
the projective dimension of the complete linear
system jDj. The principal objects of Brill–Noether
theory are the sets W
r
d
Cl
d
(C) = Pic
d
(C) given by
W
r
d
ðCÞ¼ D; deg D ¼ d; rðDÞr
fg
These sets are subvarieties of Cl
d
(C) = Pic
d
(C).
We denote by g
r
d
a linear system (not necessarily
complete) of degree d and projective dimension r.
Closely related to the varieties W
r
d
are the sets
G
r
d
ðCÞ¼ ; is a g
r
d
on C
These sets also have a natural structure as a projective
variety. Clearly, there are maps G
r
d
(C) ! W
r
d
(C).
If g = g(C) is the genus of the curve C, then the
Brill–Noether number is defined as
ðg; r; dÞ¼g ðr þ 1Þðg d þ rÞ
Its significance is that it is the expected dimension of
the varieties G
r
d
(C). The two basic results of Brill–
Noether theory are:
Theorem 7 (Existence Theorem). Let C be a curve
of genus g. Let d, r be integers such that d 1, r 0,
and (g, r, d) 0. Then G
r
d
(C) and hence W
r
d
(C) are
nonempty and every component of G
r
d
(C) has dimen-
sion at least . If r d g, thenthesameistrue
for W
r
d
(C).
Theorem 8 (Connectedness Theorem). Let C be
a curve of genus g and d, r integers such that d 1,
r 0, and (g, r, d) 1. Then G
r
d
(C) and hence also
W
r
d
(C) are connected.
The above theorems hold for all curves C. There
are other theorems which only hold for general
curves (where general means outside a countable
union of proper subvarieties in the moduli space, see
the section ‘‘Modul i of compact Riem ann surfa ces’’).
Theorem 9 (Dimension Theorem). Let C be a
general curve of genus g and d 1, r 0 integers. If
(g, r, d ) < 0, then G
r
d
(C) = ;. If 0, then every
component of G
r
d
(C) has dimension .
Theorem 10 (Smoothness Theorem). Let C be a
general curve of genus g and d 1, r 0. Then,
G
r
d
(C) is smooth of dimension . If 1, then
G
r
d
(C) and hence W
r
d
(C) are irreducible.
Brill–Noether theory started with a paper of Brill
and Noether in 1873. It was, however, only from
the 1970s onwards that the main theorems could be
proved rigorously, due to the work of Griffiths,
Harris, Kleiman, Mumford, and many others. For
an extensive treatment of the theory, as well as a list
of references, the reader is referre d to Arbarello
et al. (1985).
Green’s Conjecture
In recent years, much progress was a chieved i n
understanding the equations of canonical c urves. If
the curve C is not hyperelliptic, then the canonical
map ’
jK
C
j
: C ! P
g1
defines an embedding. We
shall, in this case, identify C with its image in P
g1
and call this a canonical curve. The Clifford index
(for a precise definition see Lazarsfeld (1989))isa
first measure of how special a curve C is with
respect to the canonical map. Hyperelliptic curves,
where t he canonical map fails to be an embedding,
have, by definition, Clifford index 0. The two next
special cases are plane quintic curves (they have
a g
2
5
) and trigonal c urves. A curve C is called
trigonal, if there is a 3 : 1 map C ! P
1
,inwhich
case C has a g
1
3
. More generally, the gonality of a
curve C is the minimal degree of a surjective map
C ! P
1
. Plane quintics and trigonal curves are
precisely the curves w hich have Clifford index 1.
Theorem 11 (Enriques–Babbage). If C P
g1
is a
canonical curve, then C is either defined by quad-
ratic equations, or it is trigonal or isomorphic to a
plane quintic curve (i.e., it has Clifford index 1).
One can now ask more refined questions about
the equations defining canonical curves and the
relations (syzygies) among these equations. This
leads to looking at the minimal free resolution of a
canonical curve C, which is of the form
0 I
C
j
O
P
g1 ðjÞ
0j
j
O
P
g1 ðjÞ
kj
0
Here, I
C
is the ideal sheaf of C and O
P
g1
(n)isthe
nth power of the dual of the Hopf bundle (or
tautological sub-bundle) on P
g1
if n 0,
resp. the jnjth power of the Hopf bundle if n <
0. The
ij
(C) are called the Betti numbers of C.
The Green conjecture predicts a link between the
nonvanishing of certain Betti numbers and geo-
metric properties of the canonical curve, such as
the existence of multisecants. Rec ently, C Voisin
and M Teixidor have proved the Green conjecture
for general curves of given gonality (see Beauville
(2003)).
426 Riemann Surfaces

Moduli of Compact Riemann Surfaces
As a set, the moduli space of compact Riemann
surfaces of genus g is defined as
M
g
¼ C; C is a compact
f
Riemann surface of genus gg=ffi
For genus g = 0, the only Riemann surface is the
Riemann sphere
^
C = P
1
and hence M
0
consists of
one point only. Every Riemann surface of genus 1 is
a torus
E ¼ C=L
for some lattice L, which can be written in the form
L
¼ Z þ Z; Im >0
Two elliptic curves E
= C=L
and E
0
= C=L
0
are
isomorphic if and only if a matrix
M ¼
ab
cd
2 SLð2; ZÞ
exists with
0
¼
a þ b
c þ d
This proves that
M
1
¼ H
1
=SLð2; ZÞ
and this construction also shows that M
1
can itself
be given the structure of a Riemann surface. Using
the j-function, one obtains that
M
1
ffi C
The situation is considerably more complicated for
genus g 2. The space of infinitesimal deformations
of a curve C is given by H
1
(C, T
C
) where T
C
is the
tangent bundle. By Serre duality
H
1
ðC; T
C
ÞffiH
0
ðC;!
2
C
Þ
and by Riemann’s theorem it then follows that
dim H
1
ðC; T
C
Þ¼dim H
0
ðC;!
2
C
Þ¼3g 3
This shows that a curve of genus g depends on
3g 3 parameters or moduli, a dimension count
which was first performed by Riemann.
In genus 2 every curve has the hyperelliptic
involution, and for a genera l curve of genus 2 this
is the only automorphism. In genus g 3 the
general curve has no automorphisms, but some
curves do. The order of the automorphism group is
bounded by 84(g 1). The existence of automorph-
ism for some curves means that M
g
is not a
manifold, but has singularities. The singularities
are, however, fairly mild. Locally, M
g
always
looks like C
3g3
=G near the origin, where G is a
finite group acting linearly on C
3g3
. One expresses
this by saying that M
g
has only finite quot ient
singularities. A space with this property is also
sometimes referred to as a V-manifold or an
orbifold. Moreover, M
g
is a quasiprojective variety,
that is, a Zariski-open subset of a projective variety.
As the above parameter count implies, the dimen-
sion of M
g
is 3g 3. At this point it can also be
clarified what is meant by a general curve in the
context of Brill– Noether theory: a property is said to
hold for the general curve in Brill–Noether theory if
it holds outside a countable number of proper
subvarieties of M
g
.
It is often useful to work with projective, rather
than quasiprojective, varieties. This means that one
wants to compactify M
g
to a projective variety M
g
,
preferably in such a way that the points one adds
still correspond to geometric objects. The crucial
concept in this context is that of a stable curve. A
stable curve of genus g is a one-dimensional
projective variety with the follo wing properties:
1. C is connected (but not necessarily irreducible),
2. C has at most nodal singularities (i.e., two local
analytic branches meet transversally),
3. the arithmetic genus p
a
(C) = h
1
(C, O
C
) = g, and
4. the automorphism group Aut(C)ofC is finite.
The last of these cond itions is equivalent to the
following: if a component of C is an elliptic curve,
then this must either meet another component or
have a node, and if a component is a rational curve,
then this component must either have at least two
nodes or one node and intersect another component,
or it is smooth and has at least three points of
intersection with other components.
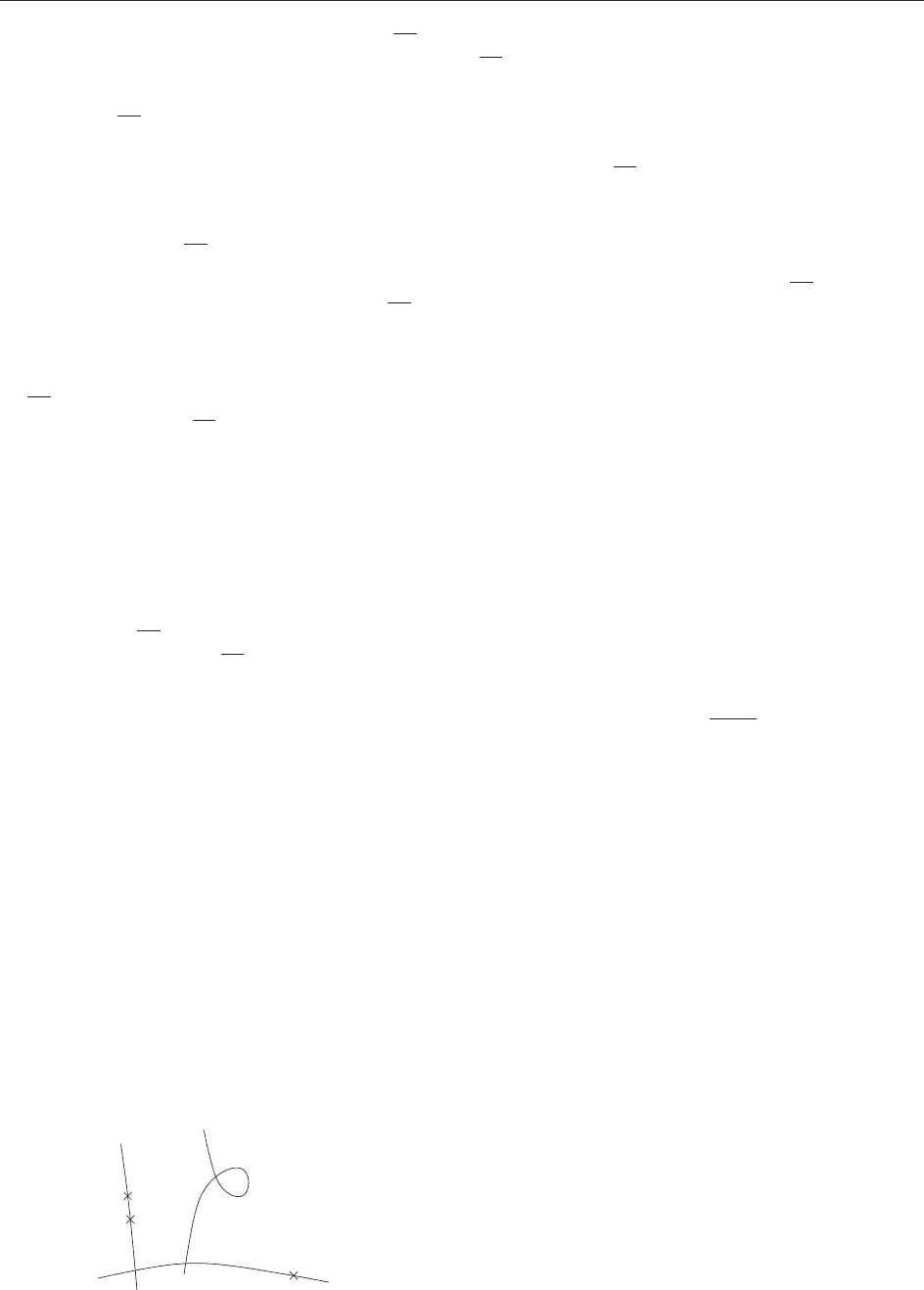
It should be noted that, in contrast to the previous
illustrations, Figure 5 is drawn from the complex
point of view, that is, the curves appear as one-
dimensional objects.
The concept of stable curves leads to what is
generally known as the Deli gne–Mumford compac -
tification of M
g
:
M
g
¼fC; C is a stable curve of genus gg=ffi
g = 0
g
= 2
Figure 5 An example of a stable curve of genus 3.
Riemann Surfaces 427
Theorem 12 (Deligne–Mumford, Knudsen). M
g
is
an irreducible, projective variety of dimension 3g 3
with only finite quotient singularities.
The spaces
M
g
have been studied intensively over
the last 30 years. From the point of view of
classification, an important question is to determine
the Kodaira dimension of these spaces.
Theorem 13 (Harris–Mumford, Eisenbud–Harris).
The moduli spaces
M
g
are of general type for
g > 23.
On the other hand, it is known that
M
g
is
rational for g 6, unirational for g 14, and has
negative Kodaira dimension for g 16.
A further topic is to understand the cohomology
of
M
g
, resp. the Chow ring, and to compute the
intersection theory on
M
g
. For these topics we refer
the reader to Vakil (2003).
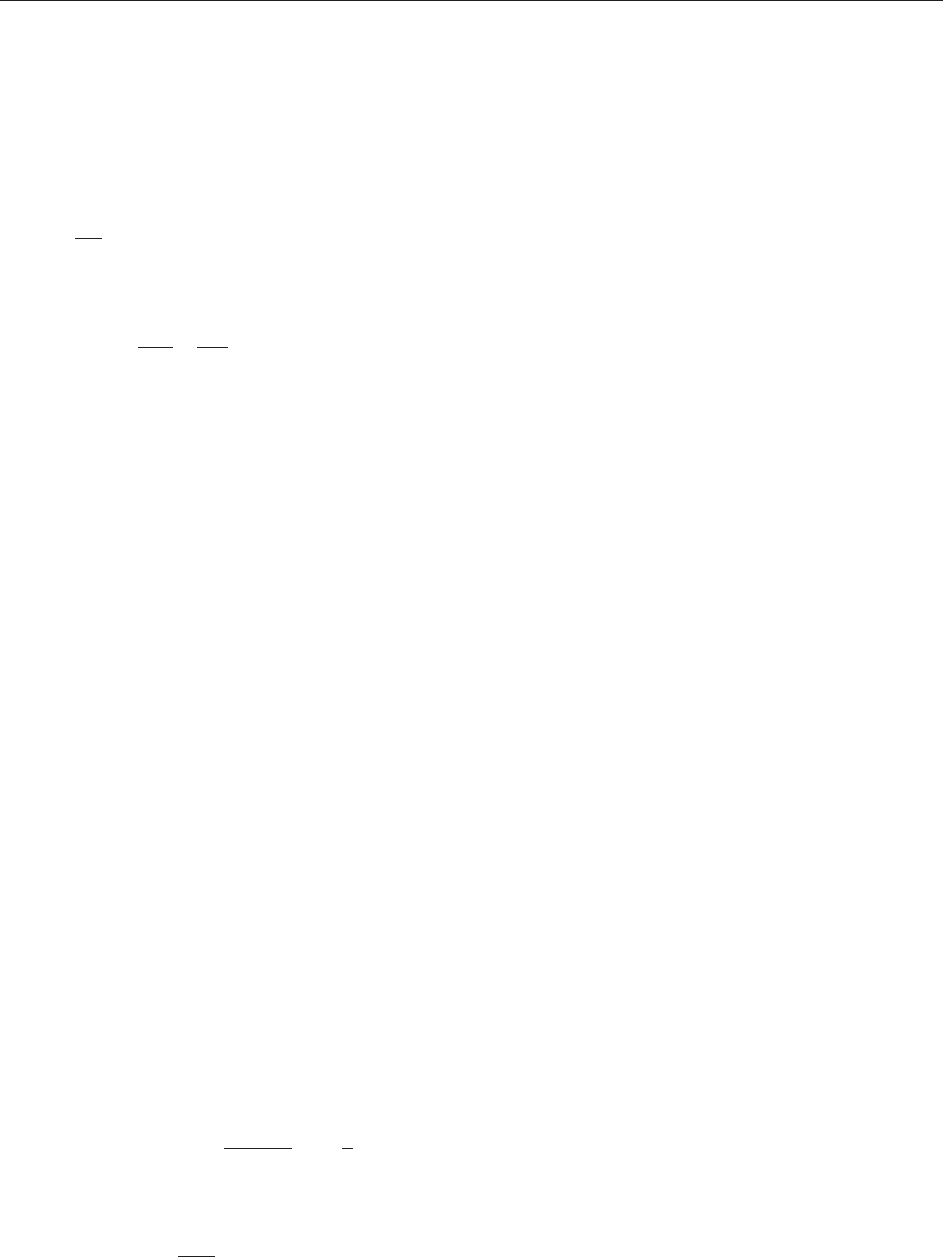
Closely related is the moduli problem of stable
n-pointed curves. A stable n-pointed curve (Figure 6)
is an (n þ 1)-tuple (C, x
1
, ..., x
n
), where C is a
connected nodal curve and x
1
, ..., x
n
are smooth
points of C with the stability condition that the
automorphism group of ( C, x
1
, ..., x
n
) is finite.
These curves can be parametrized by a coarse
moduli space
M
g, n
. These spaces share many
properties of the spaces
M
g
: they are irreducible,
projective varieties with finite quotient singularities
and of dimension 3g 3 þ n.
A further development, which has become very
importantinrecentyears,isthatofmodulispacesof
stable maps. These were introduced by Kontsevich in
the context of quantum cohomology. To define stable
maps, one first fixes a projective variety X and then
considers (n þ 2)-tuples (C, x
1
, ..., x
n
, f ) where
(C, x
1
, ..., x
n
)isann-pointed curve of genus g and
f : C ! X a map. The stability condition is, that this
object allows only finitely many automorphisms
’ : C ! C, fixing the marked points x
1
, ..., x
n
,such
that f ’ = f . In order to obtain meaningful moduli
spaces, one also fixes a class 2 H
2
(X, Z). One then
asks for a space parametrizing all stable (n þ 2)-tuples
(C, x
1
, ..., x
n
, f ) with the additional property that
f
[C] = . This construction is best treated in the
language of stacks, and one can show that this moduli
problem gives rise to a proper Deligne–Mumford stack
M
g, n
(X, ). In general, this stack is very complicated,
it need not be connected, can be very singular, and may
have several components of different dimensions. Its
expected dimension is
exp : dim
M
g; n
ðX;Þ
¼ðdim X 3Þð1 gÞþn þ
Z
c
1
ðT
X
Þ
Quantum cohomology can now be rephrased as
intersection theory on the stack
M
g, n
(X, ). In
general, these stacks do not have the expected
dimension. For this reason, Behrend and Fantechi
(1997) have constructed a virtual fundamental class of
the right dimension, which is the correct tool for the
intersection theory which gives the algebro-geometric
definition of quantum cohomology. In addition to this,
there is also a symplectic formulation. It was shown by
B Siebert that both approaches coincide.
Verlinde Formula and Conformal Blocks
The study of vector bundles (locally free sheaves) on
a compact Riemann surface is an area of research in
its own right. For a rank-r bundle E, the slope of E is
defined by
ðEÞ ¼
deg E
r
where the degree of E is defined as the degree of the
line bundle
V
r
E = det E. The bundle E is called
stable, resp. semistable, if
ðFÞ <ðEÞ; resp:ðFÞ ðEÞ
for every proper sub-bundle {0} $ F $ E.LetC be a
compact Riemann surface of genus g 2 and let
SU
C
(r) be the moduli space of semistable rank-r vector
bundles with trivial determinant det E = O
C
.Thisis
a projective variety of dimension (r
2
1)(g 1).
It contains a smooth open set, whose points corres-
pond to the isomorphism classes of stable vector
bundles. The complement of this set is in general the
singular locus of SU
C
(r) and its points correspond to
direct sums of line bundles of degree 0. These are the
so-calledgradedobjectsofthesemistable,butnot
stable, bundles. By a theorem of Narasimhan and
Seshadri, the points of SU
C
(r) are also in one-to-one
correspondence with the isomorphism classes of
representations
1
(C) ! SU(r).
Let L 2 Pic
g1
(C) be any line bundle of degree
g 1onC. Then, the set
L
¼E2SU
C
ðrÞ; dim H
0
ðC; ELÞ > 0
g = 2
g
= 0
g
= 0
Figure 6 An example of marked stable curve.
428 Riemann Surfaces
is a Cartier divisor on SU
C
(r) and thus defines a line
bundle L on SU
C
(r). This is a natural generalization
of the construction of the classical theta divisor. The
line bundle L generates the Picard group of the
moduli space SU
C
(r).
Theorem 14 (Verlinde Formula). If C has genus g
and k is a positive integer, then
dim H
0
ðSU
C
ðrÞ; L
k
Þ
¼
r
r þ k
g
X
StT¼f1;...;rþkg
jSj¼r
Y
s2S
t2T
sin
s t
r þ k
g1
This formula was first found by Verlinde in the context
of conformal field theory. Due to this relationship, the
spaces H
0
(SU
C
(r), L
k
) are also called conformal
blocks. These spaces can also be defined for principal
bundles. Rigorous proofs for the general case of the
Verlinde formula are due to Beauville–Laszlo and
Faltings. For a survey, see Beauville (1995).
See also: Characteristic Classes; Cohomology Theories;
Index Theorems; Mirror Symmetry: a Geometric Survey;
Moduli Spaces: An Introduction; Polygonal Billiards;
Several Complex Variables: Basic Geometric Theory;
Several Complex Variables: Compact Manifolds;
Topological Gravity, Two-Dimensional.
Further Reading
Arbarello E, Cornalba M, Griffiths Ph, and Harris J (1985)
Geometry of Algebraic Curves, vol. I. New York: Springer.
Beauville A (1995) Vector bundles on curves and generalized
theta functions: recent results and open problems. In: Boutet
de Montel A and Morchenko V (eds.) Current Topics in
Complex Algebraic Geometry, (Berkeley, CA, 1992/93),
Math. Sci. Res. Inst. Publ., vol. 28, pp. 17–33. Cambridge:
Cambridge University Press.
Beauville A (2003) La conjecture de green ge´ne´rique [d’apre`s
C. Voisin]. Expose´ 924 du Se´minaire Bourbaki.
Behrend K and Fantechi B (1997) The intrinsic normal cone.
Inventiones Mathematicae 128: 45–88.
Faber C and Looijenga E (1999) Remarks on moduli of curves. In:
Faber C and Looijenga E (eds.) Moduli of Curves and Abelian
Varieties, Aspects Math. E33, pp. 23–45. Braunschweig: Vieweg.
Farkas H and Kra I (1992) Riemann Surfaces, 2nd edn. New
York: Springer.
Forster O (1991) Lectures on Riemann Surfaces (translated from
the 1977 German Original by Bruce Gilligan), Reprint of the
1981 English Translation. New York: Springer.
Griffiths Ph and Harris J (1994) Principles of Algebraic
Geometry, Reprint of the 1978 Edition, Wiley Classics
Library. New York: Wiley.
Hartshorne R (1977) Algebraic Geometry. Heidelberg: Springer.
Jost J (1997) Compact Riemann Surfaces. An Introduction to
Contemporary Mathematics (translated from the German
Manuscript by Simha RR). Berlin: Springer.
Kirwan F (1992) Complex Algebraic Curves. Cambridge:
Cambridge University Press.
Lazarsfeld R (1989) A sampling of vector bundle techniques in the
study of linear series. In: Cornalba M, Gomez-Mont X, and
Verjovsk (eds.) Lectures on Riemann Surfaces, pp. 500–559.
Teaneck, NJ: World Scientific.
Miranda R (1995) Algebraic Curves and Riemann Surfaces.
Providence: American Mathematical Society.
Mumford D (1995) Algebraic Geometry. I. Complex Projective
Varieties, Reprint of the 1976 Edition. Berlin: Springer.
Vakil R (2003) The moduli space of curves and its tautological
ring. Notices of the American Mathematical Society 50(6):
647–658.
Weyl H (1997) Die Idee der Riemannschen Fla¨ che (Reprint of the
1913 German Original, With Essays by Reinhold Remmert,
Michael Schneider, Stefan Hildebrandt, Klaus Hulek and
Samuel Patterson. Edited and with a Preface and a Biography
of Weyl by Remmert). Stuttgart: Teubner.
Riemann–Hilbert Methods in Integrable Systems
D Shepelsky, Institute for Low Temperature Physics
and Engineering, Kharkov, Ukraine
ª 2006 Elsevier Ltd. All rights reserved.
Introduction
The Riemann–Hilbert (RH) method in mathematical
physics and analysis consists in reducing a particular
problem to the problem of reconstruction of an
analytic, scalar- or matrix-val ued function in the
complex plane from a prescribed jump across a
given curve. More precisely, let an oriented contour
be given in the complex -plane. The contour
may have points of self-intersections, and it may
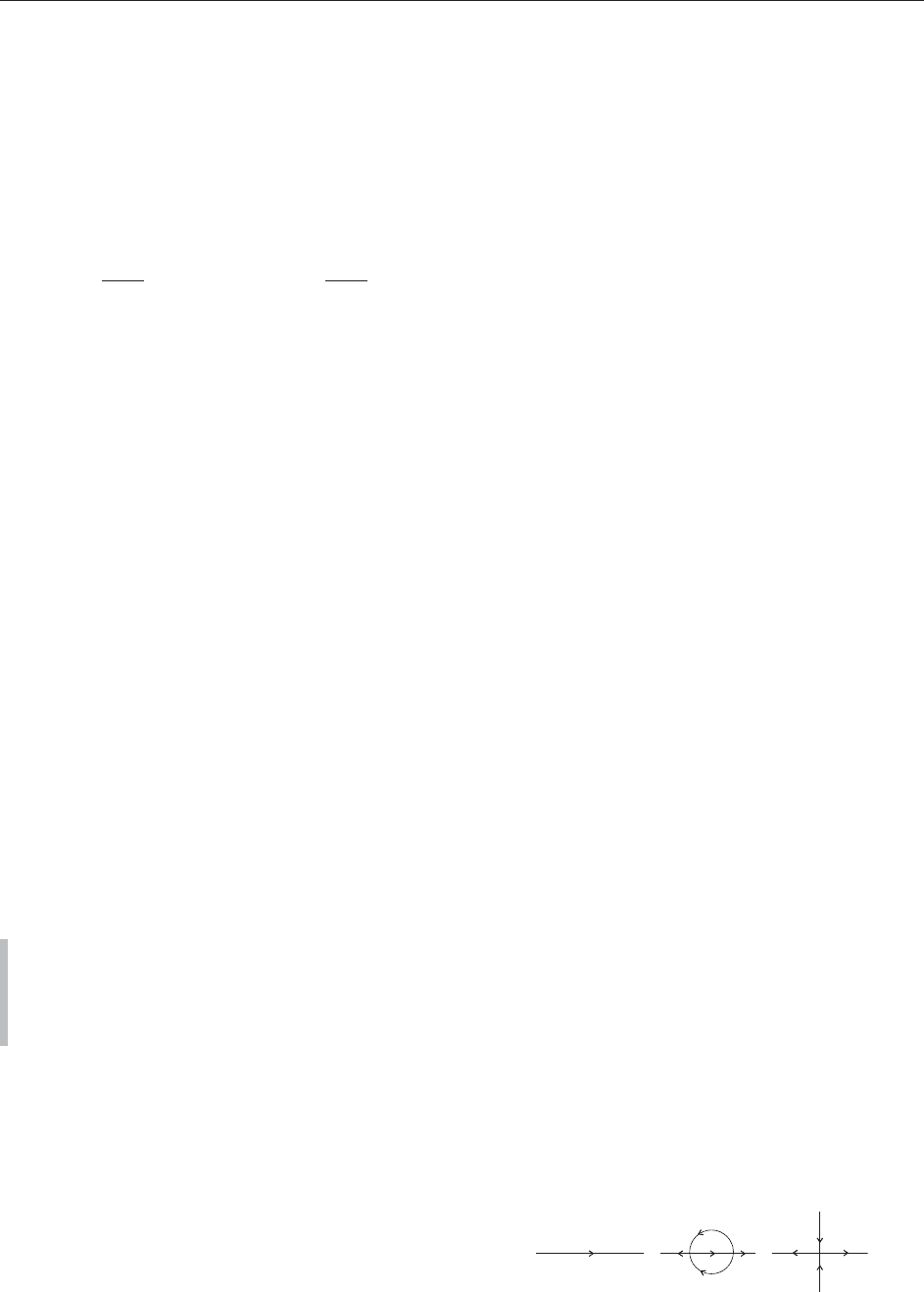
consist of several connected components; typical
contours appearing in applications to integrable
systems are shown in Figure 1.
The orientation of an arc in defines the þ
and the side of . Suppose in addition that we
are g iven a map v : !GL(N, C)withv, v
1
2
L
1
(). The ( normalized) RH problem determined
by the pair (, v) consists in finding an N N
Figure 1 Typical contours for RH problems.
Riemann–Hilbert Methods in Integrable Systems 429

matrix-valued function m() with the following
properties:
mðÞ is analytic in Cn ½1a
m
þ
ðÞ¼m
ðÞvðÞ for 2
where m
þ
ðÞðm
ðÞÞ is the limit
of m from the þ ðÞ side of ½1b
mðÞ!I (identity matrix) as !1 ½1c
The precise sense in which the limit at 1 and the
boundary values m
are attained are technical
matter that should be specified for each given RH
problem (, v).
Concerning the name RH problem we note that
in literature (particularly, in the theory of bound-
ary values of analytic functions), the problem of
reconstructing a f unction from its jump across a
curve is often called th e Hilbert bou ndary-value
problem. The closely related problem of analytic
matrix factorization (given and v,findG()
analytic and nondegenerate in Cn such that
G
þ
G
= v on ) is sometimes called the Riemann
problem. The name ‘‘RH problem’’ is also
attributed to the reconstruction of a Fuchsian
system with given poles and a given monodromy
group.
In applications, the jump matrix v also depends
on certain parameters, in which the original problem
at hand is naturally formulated (e.g., v = v(; x, t)in
applications to the integrable nonlinear differential
equations in dim ension 1 þ 1, with x being the space
variable an d t the time variable), and the main
concern is the behavior of the solution of the RH
problem, m(; x, t), as a function of x and t.
Particular interest is in the behavior of m(; x, t)as
x and t become large.
In the scalar case, N = 1, rewriting the original
multiplicative jump condition in the additive form
log m
þ
ðÞ¼log m
þ
ðÞþlog vðÞ
and using the Cauchy–Plemelj–Sokhotskii formula
give an explicit integral representation for the
solution
mðÞ¼exp
1
2i
Z
log vð Þ
d
½2
(in the case of nonzero index, log vj
6¼ 0, formula
[2] admits a suitable modification).
A generic (nonabelian) matrix RH problem
cannot be solved explicitly in terms of contour
integrals; however, it can always be reduced to a
system of linear singular-integral equations, thus
linearizing an originally nonlinear system.
The main benefit of reducing an originally non-
linear problem to the analytic factorization of a
given mat rix function arises in asymptotic analysis.
Typically, the dependence of the jump matrix on the
external parameters (say, x and t) is oscillatory. In
analogy of asymptotic evaluation of oscillatory
contour integrals via the classical method of steepest
descent, in the asymptotic evaluation of the solution
m(; x, t) of the matrix RH problem as x, t !1, the
nonlinear steepest-descent method examines the
analytic structure of the jump matrix v(; x, t)in
order to deform the contour to contours where
the oscillatory factors become exponentially small as
x, t !1, and hence the original RH problem
reduces to a collection of local RH problems
associated with the relevant points of stationary
phase. Although the method has (in the matrix case)
noncommutative and nonlinear elements, the final
result of the analysis is as efficient as the asymptotic
evaluation of the oscillatory inte grals.
Dressing Method
The RH method allows describing the solution of a
differential system independently of the theory of
differential equations. The solution might be expli-
cit, that is, given in terms of elementary or elliptic or
abelian functions and contour integrals of such
functions. In general (transce ndental) case, the
solution can be represented in terms of the solution
of certain linear singular integral equations.
In the modern theory of integrable systems, a
system of nonlinear differential equations is often
called integrable if it can be represented as a
compatibility condition of an auxiliary overdeter-
mined linear system of differential equations called a
Lax pair of the given nonlinear system (actually it
might involve more than two linear equations). In
order that the compatibility condition represents a
nontrivial nonlinear system of equations, the Lax
pair is required to depend rationally on an auxiliary
parameter (called a spectral parameter). The RH
problem formulated in the complex plane of the
spectral parameter allows, given a particular solu-
tion of the compatibility equa tions, to construct
directly new solutions of the compatibility system by
‘‘dressing’’ the initial one.
For example, let D(x, ), x 2 R
n
, 2 C be an N N
diagonal, polynomial in with smooth coefficients,
function such that a
j
:= @D=@x
j
are polynomials in
of degree d
j
. Then
0
:= exp D(x, ) solves the
system of linear equations @
0
=@x
j
= a
j
0
, whose
compatibility conditions @
2
0
=@x
j
@x
k
= @
2
0
=@x
k
@x
j
are trivially satisfied. Given a contour and a smooth
function v, consider the matrix RH problem [1]
430 Riemann–Hilbert Methods in Integrable Systems
with the jump matrix
~
v(; x):= expD(x, )v ()
exp D(x, ). Let m(; x ) be the solution of this RH
problem. Then (D
j
m)
þ
= (D
j
m)
~
v,whereD
j
f :=
@f =@x
j
þ [a
j
, f ]with[a, b]:= ab ba. The Liouville
theorem implies that (D
j
m)m
1
is an entire function
which is o(
d
j
)as !1.Setting(x, ):= m(; x)
exp D(x, ) gives the system of linear equations
@
@x
j
¼ a
j
þ
X
k<d
j
k
q
jk
ðxÞR
j
ðx;Þ ½3
the compatibility conditions for which are
@R
k
@x
j
@R
j
@x
k
¼½R
j
; R
k
½4
Equating coefficients of variou s powers of in [4]
gives a (generally) nonlinear system of partial
differential equations for the coefficient matrices
q
jk
. Thus, given D(x, ), the RH problem, if it is
solvable, maps the pair (, v) to solutions of [4].
Specializing to n = 2 with variab les (x, t) 2 R
2
, the
overdetermined system of linear equations and the
corresponding compatibility conditions are
x
¼ U;
t
¼ V ½5
and
U
t
V
x
þ½U; V¼0 ½6
respectively. Conditions [6] are sometimes called the
zero-curvature conditions.
Equations [5] and [6] with U and V depending
rationally on the spectral parameter represents the
integrable nonlinear systems in 1 þ 1 dimension. A
typical example of such a system is the (defocusing)
nonlinear Schro¨ dinger (NLS) equation
iq
t
þ q
xx
2jqj
2
q ¼ 0 ½7
Starting from the RH problem with the 2 2 jump
matrix
vð; x; tÞ¼e
i
3
=2
vðÞe
i
3
=2
½8
where (; x, t) = t
2
þ x,
3
= diag{1, 1}, and
v() satisfies the involution
3
v
()
3
= v(
),
expanding out the limit of the solution of the RH
problem as !1
mð; x; tÞ¼I þ
m
1
ðx; tÞ
þ o
1
½9
and arguing as above gives [5], with
U ¼
i
3
2
þ
0 q
q 0
!
½10
and q = i(m
1
)
12
, whereas the compatibility condi-
tion [6] reduces to [7].
The relation between the RH problem and the
differential equations [5] is local in x and t; it is based
only on the unique solvability of the RH problem,
the Liouville theorem, and the explicit dependence of
the jump matrix in x and t. The uniqueness of the
solution of an RH problem is basically provided by
the Liouville theorem: the ratio m
(1)
(m
(2)
)
1
of any
two solutions is analytic in Cn and continuous
across and is therefore identically equal to I by the
normalization condition [1c].
On the other hand, there are no completely
general effective criteria for the solvability. Never-
theless, many RH problems seen in applications to
integrable syst ems satisfy the following sufficient
condition: if is symmetric with respect to R and
contains R, and if, in addition, v
() = v(
) for 2
nR and Re v()>0 for 2 R, then the RH
problem is solvable.
For nonlinear equations supporting solitons, the
RH problem appears naturally in a more general
setting, as a meromorphi c factorization problem,
where m in [1] is sought to be a (piecewise)
meromorphic function, with additionally prescribed
poles and respective residue conditions. Alterna-
tively, in the Riemann factorization problem
G
þ
G
= v, one assumes that G degenerates at
some given points
1
, ...,
n
2
þ
and
1
, ...,
n
2
, where C =
þ
[
[ , and prescribes two sets
of subspaces, Im Gj
=
j
and Ker Gj
=
j
. In the case
v I, the solution of the factorization problem with
zeros (meromorphic RH problem) is purely alge-
braic, and gives formulas describing multisoliton
solutions. In the general case, v 6 I, the mero-
morphic RH problem can be algebraically converted
to a holomorphic RH problem, by subsequently
removing the poles with the help of the Blaschke–
Potapov factors.
Alternatively, a meromorphic RH problem can be
converted to a holomorphic one by adding to an
additional contour
aux
enclosing all the poles,
interpolating the constan ts involved in the residue
conditions inside the region surrounded by
aux
, and
defining a new jump matrix on
aux
using the
interpolant and the Blaschke–Potapov factors.
RH problems formulated on the complex plane C
correspond typically to solutions of relevant non-
linear problems decaying at infinity. For other types
of boundary conditions (e.g., nonzero constants or
periodic or quasiperiodic boundary conditions), the
corresponding RH problem is naturally formulated
on a Riemann surface. For example, the RH
problem associated with finite density conditions
q(x, t) !e
i
as x !1 for the NLS equation [7]
is naturally formulated on the two-sheet Riemann
surface of the function k() =
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
2
4
2
p
with
Riemann–Hilbert Methods in Integrable Systems 431