Francoise J.-P., Naber G.L., Tsun T.S. (editors) Encyclopedia of Mathematical Physics
Подождите немного. Документ загружается.

Theorem 6 The map defined in eqns [7] and [6] is
a linear isomorphism. The inverse map is given by
BðHH
0
Þ3 7!T
2L ½8
with
he
0
; T
ðÞe
0
i¼d tr ðje
0
ihe
0
j
T
Þ
½9
where e
0
1
, ..., e
0
d
0
2H
0
denote an (arbitrary) ortho-
normal basis of H
0
and the transposition of is
defined with respect to the basis e
, = 1, ..., d used
to define in [5].
From the definition of R
T
in eqn [6], it is obvious
that R
T
is positive, if T is CP. To see that the
converse is also true is not as trivial (because a
transposition is involved), but it requires only a
short calculation, which is omitted here. Hence, we
get:
Corollary 7 The operator R
T
is positive, iff the
mapTisCP.
Examples
Let us return now to the general case (i.e., arbitrary
input and output algebras) and discuss several
examples.
Channels Under Symmetry
It is often useful to consider channels with special
symmetry properties. To be more precise, consider
a group G and two unitary representations
1
,
2
on the Hilbert spaces H
1
and H
2
, respectively.
A channel T : B (H
1
) !B(H
2
) is called covariant
(with respect to
1
and
2
)if
T½
1
ðUÞ A
1
ðUÞ
¼
2
ðUÞ T½A
2
ðUÞ
8A 2BðH
1
Þ8U 2 G ½10
holds. The general structure of covariant channels
is governed by a fairly powerful variant of Stine-
springs theorem (Keyl and Werner 1999).
Theorem 8 Let G be a group with finite-dimen-
sional unitary representations
j
: G ! U(H
j
) and
T : B(H
1
) !B(H
2
) a
1
,
2
-covariant channel.
(i) Then there is a finite-dimensional unitary
representation
˜
: G ! U(K) and an operator
V : H
2
!H
1
Kwith V
2
(U) =
1
(U)
˜
(U )V
and T(A) = V
A 1V.
(ii) If T =
P
T
is a decomposition of T in CP and
covariant summands, there is a decomposition
1 =
P
F
of the identity operator on K into
positive operators F
2B(K) with [F
,
˜
(g)] = 0
such that T
(X) = V
(X F
)V.
The most prominent examples of covariant
channels arise with H
1
= H
2
= C
d
, G = U(d)and
1
(U) =
2
(U) = U . All channels of this type are of
the form
TðAÞ¼ð1 #ÞA þ #d
1
trðAÞ1
with # 2½0; d
2
=ðd
2
1Þ ½11
and are known as ‘‘depolarizing channels.’’ They
often serve as a standard model for noise. Two
particular cases are the ideal channel arising with
# = 0, and the completely depolarizing channel
(# = 1) which erases all information. If we choose
2
(U) =
U (where the bar denotes complex conju-
gate) instead of
2
(U) = U, we get
TðAÞ¼
#
d þ 1
trðAÞ1 þ A
T
þ
1 #
d 1
trðAÞ1 A
T
;#2½0; 1½12
If we map these channels to states of bipartite
systems (using the Jamiołkowski isomorphism from
the last section), we get ‘‘Isotropic states’’ from
eqn [11] and ‘‘Werner states’’ from [12].
Classical Channels
The classical analog to a quantum operation is a
channel T : C(X) !C(Y) which describes the trans-
mission or manipulation of classical information. As
already mentioned in the subsection ‘‘Completely
positive maps,’’ positivity and complete positivity
are equivalent in this case. Hence, we have to
assume only that T is positive and unital. Obviously,
T is characterized by its matrix elements
T
xy
=
y
(Te
x
), where
y
2C
(X) denotes the Dirac
measure at y 2 Y and e
x
2C(X) is the canonical
basis in C(X). More precisely,
y
and e
x
denote,
respectively, the probability distribution and the
function on X, given by
y
¼ð
xy
Þ
x2X
and e
x
ðyÞ¼
xy
½13
We will keep this notation up to the end of this
article. Positivity and normalization of T imply that
0 T
xy
1and
1 ¼
y
ð1Þ¼
y
Tð1ÞðÞ
¼
y
T
X
x
e
x
!"#
¼
X
x
T
xy
½14
holds. Hence the family (T
xy
)
x2X
is a probability
distribution on X and T
xy
is, therefore, the transition
probability to get the information x 2 X at the
output side of the channel if y 2 Y was sent.
Channels in Quantum Information Theory 475

Observables
Let us consider now a channel which transforms
quantum information B(H) into classical information
C(X). Since positivity and complete positivity are
again equivalent, we just have to look at a positive
and unital map E : C(X) !B(H). With the canonical
basis e
x
, x 2 X,ofC(X ), we get a family
E
x
= E(e
x
), x 2 X, of positive operators E
x
2B(H)
with
P
x2X
E
x
= 1.Hence,theE
x
form a positive
operator valued (POV) measure, i.e., an observable.
If, on the other hand, a POV measure E
x
2B(H), x 2
X, is given, we can define a quantum-to-classical
channel E : C(X) !B(H)by
Eðf Þ¼
X
x2X
f ðxÞE
x
½15
This shows that the observable E
x
, x 2 X, and the
channel E can be identified.
Preparations
Let us now exchange the role of C(X) and B(H); in
other words, let us consider a channel R : B(H) !
C(X) with a classical input and a quantum output
algebra. In the Schro¨ dinger picture, we get a family of
density matrices
x
:= R
(
x
) 2B
(H), x 2 X, where
x
2C
(X) denotes again the Dirac measure on X.
Hence, we get a parameter-dependent preparation
that can be used to encode the classical information
x 2 X into the quantum information
x
2B
(H).
Instruments
An observable describes only the statistics of
measuring results, but does not contain information
about the state of the system after the measurement.
To get a description which fills this gap, we have
to consider channels which operate on quantum
systems and produce hybrid systems as output, that is,
T : B(H) C(X) !B(K). Following Davies (1976),
we will call such an object an instrument. From T we
can derive the subchannel
CðXÞ3f 7!Tð1 f Þ 2 BðKÞ ½16
which is the observable measured by T, that is,
tr(T(1 e
x
)) is the probability to measure x 2 X on
systems in the state . On the other hand, we get for
each x 2 X a quantum channel (which is not unital)
BðHÞ 3 A 7!T
x
ðAÞ¼TðA e
x
Þ 2 BðKÞ ½17
It describes the operation performed by the instru-
ment T if x 2 X was measured. More precisely, if a
measurement on systems in the state gives the
result x 2 X, we get (up to normalization) the state
T
x
() after the measurement, while
tr T
x
ðÞ
¼ tr T
x
ðÞ1
¼ tr Tð1 e
x
ÞðÞ½18
is (again) the probability to measure x 2 X on .
The instrument T can be expressed in terms of the
operations T
x
by
TðA f Þ¼
X
x
f ðxÞT
x
ðAÞ½19
Hence, we can identify T with the family T
x
, x 2 X.
Finally, we can consider the second marginal of T
BðHÞ 3 A 7!TðA 1Þ¼
X
x2X
T
x
ðAÞ 2 BðKÞ ½20
It describes the operation we get if the outcome of
the measurement is ignored.
The best-known example of an instrument is a von
Neumann–Lu¨ ders measurement associated with a PV
measure given by family of projections E
x
, x = 1,
..., d; for example, the eigenprojections of a self-
adjoint operator A 2B(H). It is defined as the channel
T : BðHÞ CðXÞ ! BðHÞ
with X ¼f1; ...; dg and T
x
ðAÞ¼E
x
AE
x
½21
Hence, we get the final state tr(E
x
)
1
E
x
E
x
if we
measure the value x 2 X on systems initially in the
state – this is well known from quantum mechanics.
Parameter-Dependent Operations
Let us change now the role of B(H) C(X) and
B(K ); in other words, consider a channel T : B(K) !
B(H) C(X) with hybrid input and quantum output.
It describes a device which changes the state of a
system depending on the additional classical infor-
mation. As for an instrument, T decomposes into a
family of (unital!) channels T
x
: B(K) !B(H) such
that we get T
( p) =
P
x
p
x
T
x
() in the Schro¨ din-
ger picture. Physically, T describes a parameter-
dependent operation: depending on the classical
information x 2 X, the quantum information 2
B(K ) is transformed by the operation T
x
.
Finally, we can consider a channel T : B(H)
C(X) !B(K) C(Y) with hybrid input and output
to get a parameter-dependent instrument: similarly
to the above discussion, we can define a family of
instruments T
y
: B(H) C(X) !B(K), y 2 Y, by the
equation T
( p) =
P
y
p
y
T
y
(). Physically, T
describes the following device: it receives the
classical information y 2 Y and a quantum system
in the state 2B
(K) as input. Depending on y,a
measurement with the instrument T
y
is performed,
which in turn produces the measuring value x 2 X
and leaves the quantum system in the state (up to
normalization) T
y, x
(); with T
y, x
given as in eqn
[17] by T
y, x
(A) = T
y
(A e
x
).
476 Channels in Quantum Information Theory
See also: Capacities Enhanced by Entanglement;
Capacity for Quantum Information; Entanglement;
Optimal Cloning of Quantum States; Positive Maps on
C*-Algebras; Quantum Channels: Classical Capacity;
Quantum Dynamical Semigroups; Quantum Entropy;
Quantum Spin Systems; Source Coding in Quantum
Information Theory.
Further Reading
Arveson W (1969) Subalgebras of C
-algebras. Acta Mathematica
123: 141–224.
Davies EB (1976) Quantum Theory of Open Systems. London:
Academic Press.
Jamiołkowski A (1972) Linear transformations which preserve
trace and positive semidefiniteness of operators. Reports on
Mathematical Physics 3: 275–278.
Keyl M and Werner RF (1999) Optimal cloning of pure states, testing
single clones. Journal of Mathematical Physics 40: 3283–3299.
Kraus K (1983) States Effects and Operations. Berlin: Springer.
Paulsen VI (2002) Completely Bounded Maps and Dilations.
Cambridge: Cambridge University Press.
Stinespring WF (1955) Positive functions on C
-algebras.
Proceedings of the American Mathematical Society 6: 211–216.
Chaos and Attractors
R Gilmore, Drexel University, Philadelphia, PA, USA
ª 2006 Elsevier Ltd. All rights reserved.
Introduction
Chaos is a type of behavior that can be exhibited by
a large class of physical systems and their mathe-
matical models. These systems are deterministic.
They are modeled by sets of coupled nonlinear
ordinary differential equations (ODEs):
_
x
i
¼
dx
i
dt
¼ f
i
ðx; cÞ½1
called dynamical systems. The coordinates x desig-
nate points in a state space or phase space.
Typically, x 2 R
n
or some n-dimensional manifold
for some n 3, and c 2 R
k
are called control
parameters. They describe parameters that can be
controlled in physical systems, such as pumping
rates in lasers or flow rates in chemical mixing
reactions. The most important mathematical prop-
erty of dynamical systems is the uniqueness theorem,
which states that there is a unique trajectory through
every point at which f (x; c) is continuous and
Lipschitz and f (x; c) 6¼ 0. In particular, two distinct
periodic orbits cannot have any points in common.
The properties of dynamical systems are gov-
erned, in lowest order, by the number, stability, and
distribution of their fixed points, defined by
_
x
i
= f
i
(x; c) = 0. It can happen that a dynamical
system has no stable fixed points and no stable
limit cycles (x(t) = x(t þ T), some T > 0, all t). In
such cases, if the solution is bounded and recurrent
but not periodic, it represents an unfamiliar type of
attractor. If the system exhibits ‘‘sensitivity to initial
conditions’’ (jx(t) y(t)je
t
jx(0) y(0)j for
jx(0) y(0)j= and >0 for most x(0)), the
solution set is called a ‘‘chaotic attractor.’’ If the
attractor has fractal structure, it is called a ‘‘strange
attractor.’’
Tools to study strange attractors have been
developed that depend on three types of mathe-
matics: geometry, dynamics, and topology.
Geometric tools attempt to study the metric
relations among points in a strange attractor.
These include a spectrum of fractal dimensions.
These real numbers are difficult to compute, require
very long, very clean data sets, provide a number
without error estimates for which there is no
underlying statistical theory, and provide very little
information about the attractor.
Dynamical tools include estimation of Lyapunov
exponents and a Lyapunov dimension. They include
globally averaged exponents and local Lyapunov
exponents. These are eigenvalues related to the
different stretching (>0) and squeezing (<0)
eigendirections in the phase space. To each globally
averaged Lyapunov exponent
i
,
1
2
n
,
there corresponds a ‘‘partial dimension’’
i
,0
i
1,
with
i
= 1if
i
0. The Lyapunov dimension is
the sum of the partial dimensions d
L
=
P
n
i = 1
i
.
That the partial dimension
i
= 1for
i
0 indicates
that the flow is smooth in the stretching (
i
> 0) and
flow directions and fractal in the squeezing (
i
< 0)
directions with
i
< 1. Dynamical indices provide
some useful information about a strange attractor.
In particular, they can be used to estimate some
fractal properties of a strange attractor, but not vice
versa.
Topological tools are very powerful for a
restricted class of dynamical systems. These are
dynamical systems in three dimensions (n = 3). For
such systems there are three Lyapunov exponents
1
>
2
>
3
, with
1
> 0 describing the stretching
direction and responsible for ‘‘sensitivity to initial
conditions,’’
2
= 0 describing the direction of the
flow, and
3
< 0 describing the squeezing direction
Chaos and Attractors 477
and responsible for ‘‘recurrence.’’ Strange attractors
are generated by dissipative dynamical systems,
which satisfy the additional condition
1
þ
2
þ
3
< 0. For such attractors,
1
=
2
= 1and
3
=
1
=j
3
j by the Kaplan–Yorke conjecture, so
that d
L
= 2 þ
3
= 2 þ
1
=j
3
j.
A number of tools from classical topology have
been exploited to probe the structure of strange
attractors in three dimensions. These include the
Gauss linking number, the Euler characteristic, the
Poincare´–Hopf index theorem, and braid theory.
More recent topological contributions include sev-
eral definitions for entropy, the development of a
theory for knot holders or braid holders (also called
branched manifolds), the Birman–Williams theorem
for these objects, and relative rotation rates, a
topological index for individual periodic orbits and
orbit pairs.
Three-dimensional strange attractors are
remarkably well understood; those in higher
dimensions are not. As a result, the description
that follows is largely restricted to strange attrac-
tors with d
L
< 3 that exist in R
3
or other three-
dimensional manifolds (e.g., R
2
S
1
). The obstacle
to progress in higher dimensions is the lack of a
higher-dimensional analog of the Gauss linking
number for orbit pairs in R
3
.
Overview
The program described below has two objectives:
1. classify the global topological structure of strange
attractors in R
3
; and
2. determine the ‘‘perestroikas’’ (changes) that such
attractors can undergo as experimental condi-
tions or control parameters change.
Four levels of structure are required to complete
this program. Each is topological and discretely
quantifiable. This provides a beautiful interaction
between a rigidity of structure, demanded by
topological constraints, and freedom within this
rigidity. These four levels of structure are:
1. basis sets of orbits,
2. branched manifolds or knot holders,
3. bounding tori, and
4. embeddings of bounding tori.
Branched Manifolds: Stretching
and Squeezing
A strange attractor is generated by the repetition of
two mechanisms: stretching and squeezing. Stretch-
ing occurs in the directions identified by the positive
Lyapunov exponents and squeezing occurs in the
directions identified by the negative Lyapunov
exponents. In R
3
there is one stretching direction
and one squeezing direction.
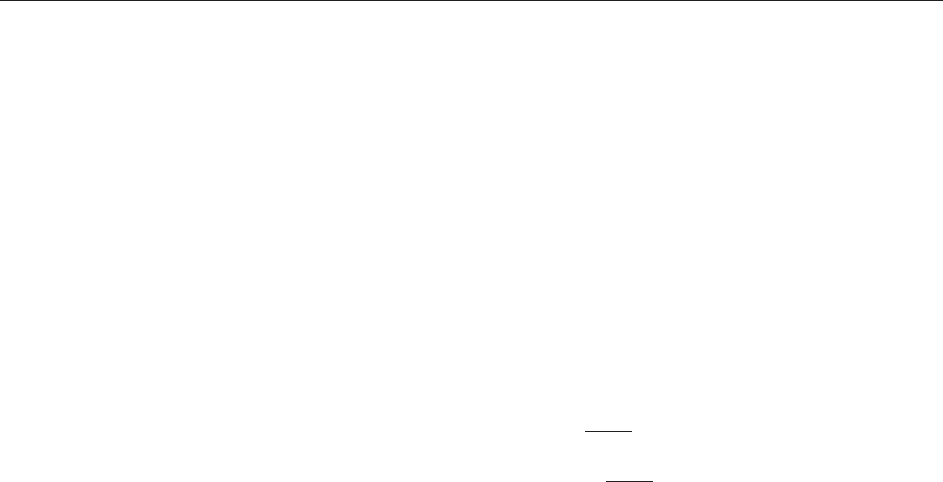
A simple stretch-and-squeeze mechanism that
nature appears to be very fond of is illustrated in
Figure 1. In this illustration, a cube of initial
conditions at (a) is advected by the flow in a short
time to (b). During this process, the cube is
deformed by being stretched (
1
> 0). It also shrinks
in a transverse direction (
3
< 0). During the initial
phase of this deformation, two nearby points
typically separate exponentially in time. If they
were to continue to separate exponentially for all
times, the invariant set would not be bounded.
Therefore, this separation cannot continue indefi-
nitely, and in fact it must somehow reverse itself
after some time because the motion is recurrent. The
mechanism shown in Figure 1 involves folding,
which begins between (b) and (c) and continues
through to (d). Squeezing occurs where points from
distant parts of the attractor approach each other
exponentially, as at (d). Finally, the cube, shown
deformed at (d), returns to the neighborhood of
initial conditions (a). This process repeats itself and
builds up the strange attractor. As can be inferred
from this figure, the strange attractor constructed by
the repetitive process is smooth in the expanding
(
1
) and flow (
2
= 0) directions but fractal in the
squeezing (
3
) direction. The attractor’s fractal
dimension is
1
þ
2
þ
3
= 2 þ
3
= 2 þ
1
=j
3
j.
Figure 1 summarizes the boundedness and recur-
rence conditions that were introduced to define
strange attractors, and illustrates one stretching and
squeezing mechanism that occurs repetitively to
build up the fractal structure of the strange attractor
Boundary
layer
Squeeze
Stretch
(d)
(c)
(a)
(b)
Figure 1 A common stretch-and-fold mechanism generates
many experimentally observed strange attractors. The Topology
of Chaos; R Gilmore and M Lefranc; Copyright ª 2002, Wiley.
This material is used by permission of John Wiley & Sons, Inc.
478 Chaos and Attractors
and to organize all the (unstable) periodic orbits in it
in a unique way. The particular mechanism shown
in Figure 1 is called a stretch-and-fold mechanism.
Other mechanisms involve stretch and roll, and tear
and squeeze.
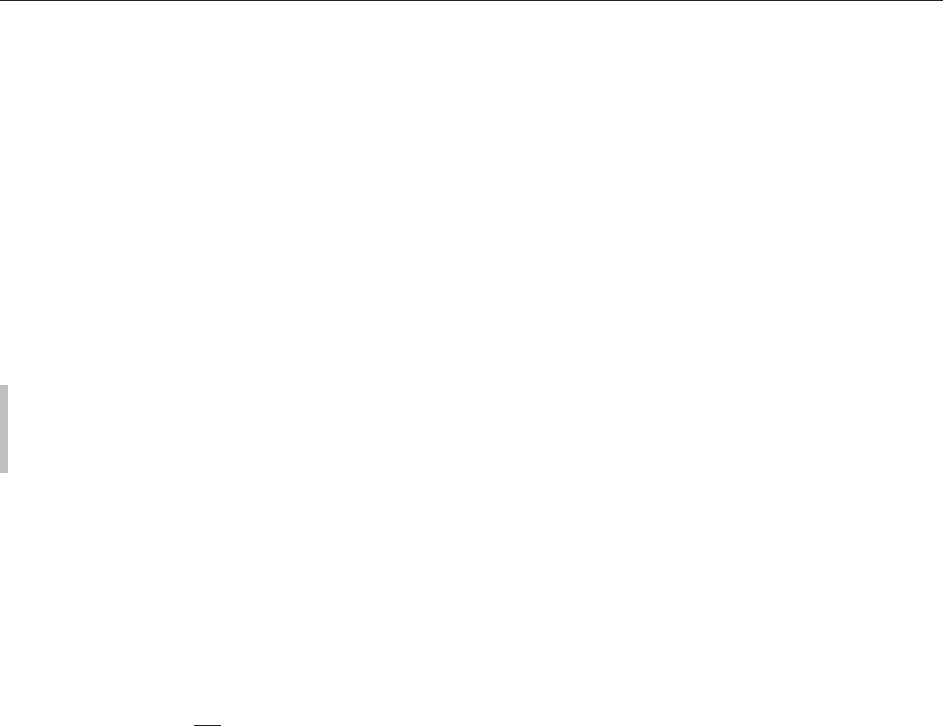
The stretch-and-squeeze mechanisms are well
summarized by the cartoons shown in Figure 2.On
the left, a cube of initial conditions (top) is deformed
under the flow. The flow is downward. Stretching
occurs in one direction (horizontal) and shrinking
occurs in a transverse direction (perpendicular to the
page). In the limit of extreme shrinking (
3
!
‘‘1”), the dynamics of the stretching part of the
flow is represented by the two-dimensional surface
shown on the bottom left. This surface fails to be a
manifold because of the singularity, called a splitting
point. This singularity represents an initial condition
that flows to an unstable fixed point with at least
one stable direction. On the right (squeezing), two
distant cubes of initial conditions (top) in the flow
are deformed and brought to each other’s proximity
under the flow (middle). In the limit of extreme
dissipation, two two-dimensional surfaces represent-
ing inflows are joined at a branch line to a single
surface representing an outflow. This surface fails to
be a manifold because of the branch line, which is a
singularity of a different kind. Points below the
branch line in this representation of the flow (on the
outflow side of the branch line) have two preimages
above the branch line, one in each inflow sheet. This
structure generates positive entropy.
A beautiful theorem of Birman and Williams
justifies the use of the two cartoons shown at the
bottom of Figure 2 to characterize strange attractors
in R
3
. As preparation for the theorem, Birman and
Williams introduced an important identification for
the nongeneric or atypical points that ‘‘are not
sensitive to initial conditions’’
x y if jxðtÞyðtÞj !
t !1
0 ½2
That is, two points in a strange attractor are
identified if they have asymptotically the same
future. In practice, this amounts to projecting the
flow down along the stable (
3
< 0) direction onto a
two-dimensional surface described by the stretching
(
1
> 0) and the flow (
2
= 0) directions. This
surface is not a manifold because of lower-
dimensional singularities: splitting points and branch
lines. The two-dimensional surface has many names,
for example, knot holder (because it holds the
periodic orbits that exist in abundance in strange
attractors), braid holders, templates, branched mani-
folds. The flow, restricted to this surface, is called a
semiflow. Under the semiflow, points in the branched
manifold have a unique future but do not have a
unique past. The degree of nonuniqueness is mea-
sured by the topological entropy of the dynamical
system. The Birman–Williams theorem is:
Theorem Assume that a flow
t
(i) on R
3
is dissipative (
1
> 0,
2
= 0,
3
< 0 and
1
þ
2
þ
3
< 0);
(ii) generates a hyperbolic strange attractor (the
eigenvectors of the local Lyapunov exponents
1
,
2
,
3
span everywhere on the attractor).
Then the projection [2] maps the strange attractor
SA to a branched manifold BM and the flow
t
on
SA to a semiflow
ˆ
t
on BM in R
3
. The periodic
orbits in SA under
t
correspond 1:1 with the
periodic orbits in BM under
ˆ
t
with perhaps one or
two specified exceptions. On any finite subset of
orbits the correspondence can be taken via isotopy.
The beauty of this theorem is that it guarantees
that a flow
t
that generates a (fractal) strange
attractor SA can be continuously deformed to a new
flow
ˆ
t
on a simple two-dimensional structure BM.
During this deformation, periodic orbits are neither
created nor destroyed. The uniqueness theorem for
ODEs is satisfied during the deformation, so orbit
segments do not pass through each other. As a
result, the topological organization of all the
Boundary
layer
Squeeze
Shrink
Shrink
Shrink
Stretch
Stretch
Flow
Flow
Branch
line
Squeeze
Flow
Flow
xxx
Figure 2 Left: The stretch mechanism is modeled by a two-
dimensional surface with a splitting point singularity. Right: The
squeeze mechanism is modeled by a two-dimensional surface
with a branch line singularity. The Topology of Chaos; R Gilmore
and M Lefranc; Copyright ª 2002, Wiley. This material is used
by permission of John Wiley & Sons, Inc.
Chaos and Attractors 479
unstable periodic orbits in the strange attractor is
the same as the topological organization of all the
unstable periodic orbits in the branched manifold. In
fact, the branched manifold (knot holder) defines
the topological organization of all the unstable
periodic orbits that it supports. Topological organi-
zation is defined by the Gauss linking number and
the relative rotation rates, another braid index.
The significance of this theorem is that strange
attractors can be characterized – in fact classified –
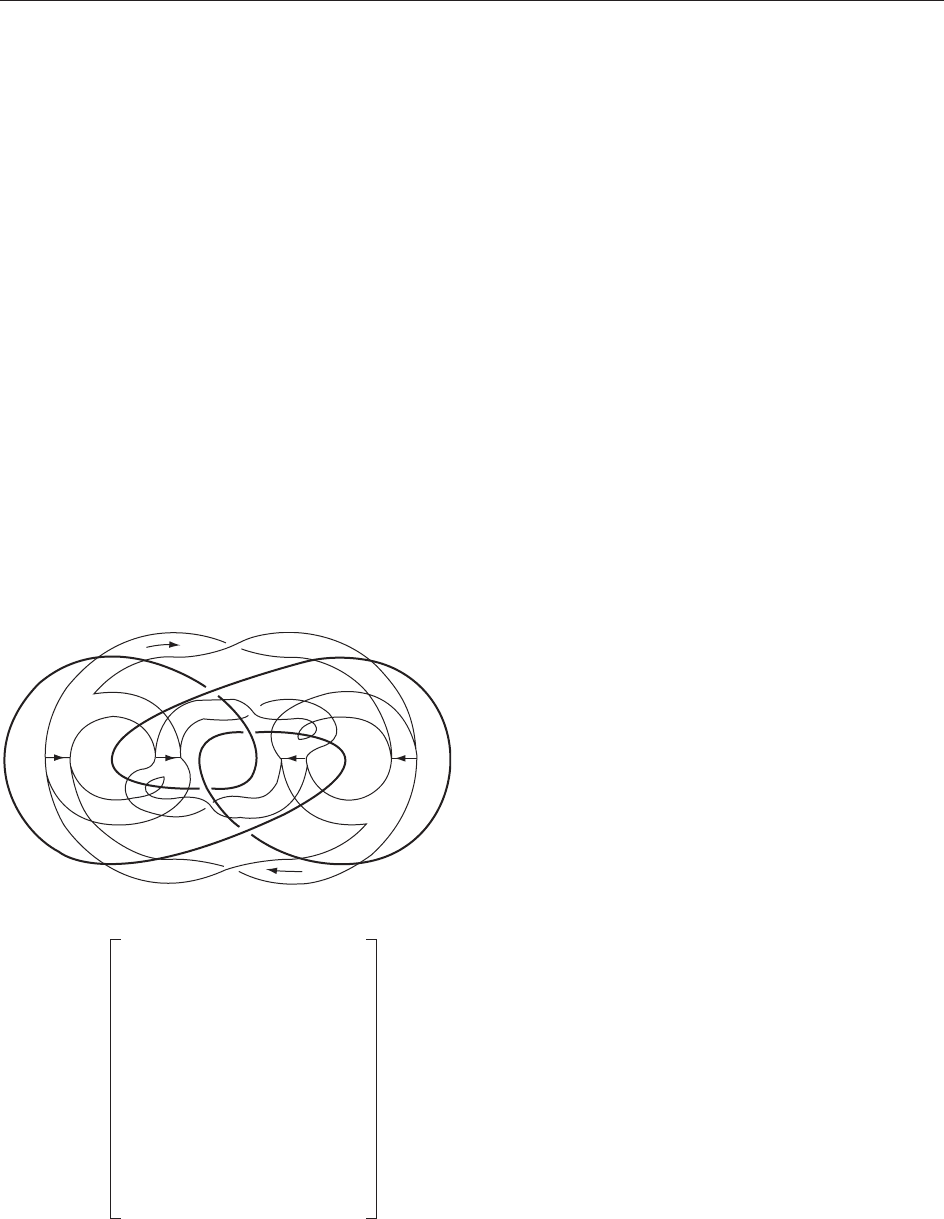
by their branched manifolds. Figure 3 shows a
branched manifold ‘‘for a figure-8 knot’’ as well as
the figure-8 knot itself (dark curve). If a constant
current is sent through a conducting wire tied into
the shape of a figure-8 knot, a discrete countable set
of magnetic field lines will be closed. These closed
field lines can be deformed onto the two-dimen-
sional surface shown in Figure 3. Each of the eight
branches of this branched manifold can be named.
One way to do this specifies the two branch lines
that are joined by the branch in the sense of the flow
(e.g., (a) and () (but not (a)). Every closed field
line can be labeled by a symbol sequence that is
unique up to cyclic permutation. This symbol
sequence provides a symbolic name for the orbit.
For example, (a)()(b)(ba) is a period-4 orbit.
The structure of a branched manifold is determined
in part by a transition matrix T. The matrix element
T
ij
is 1 if the transition from branch i to branch j is
allowed, 0 otherwise. The transition matrix for the
figure-8 branched manifold is shown in Figure 3.
The Birman–Williams theorem is stronger than its
statement suggests. More systems satisfy the state-
ment of the theorem than do the assumptions of the
theorem. The figure-8 knot, and its attendant
magnetic field, is not dissipative – in fact, it is not
even a dynamical system, yet the closed loops can be
isotoped to the figure-8 knot holder. There are other
ways in which the Birman–Williams theorem is
stronger than its statement suggests.
It is apparent from Figure 3 that the figure-8
branched manifold can be built up Lego
ª
fashion
from the two basic building blocks shown in
Figure 2. This is more generally true. Every
branched manifold can be built up, Lego
ª
fashion,
from the stretch (with a splitting point singularity)
and the squeeze (with a branch line singularity)
building blocks, subject to the following two
conditions:
1. outputs flow to inputs and
2. there are no free ends.
The figure-8 branched manifold is built up from
four stretch and four squeeze building blocks. As a
result, there are eight branches and four branch
lines.
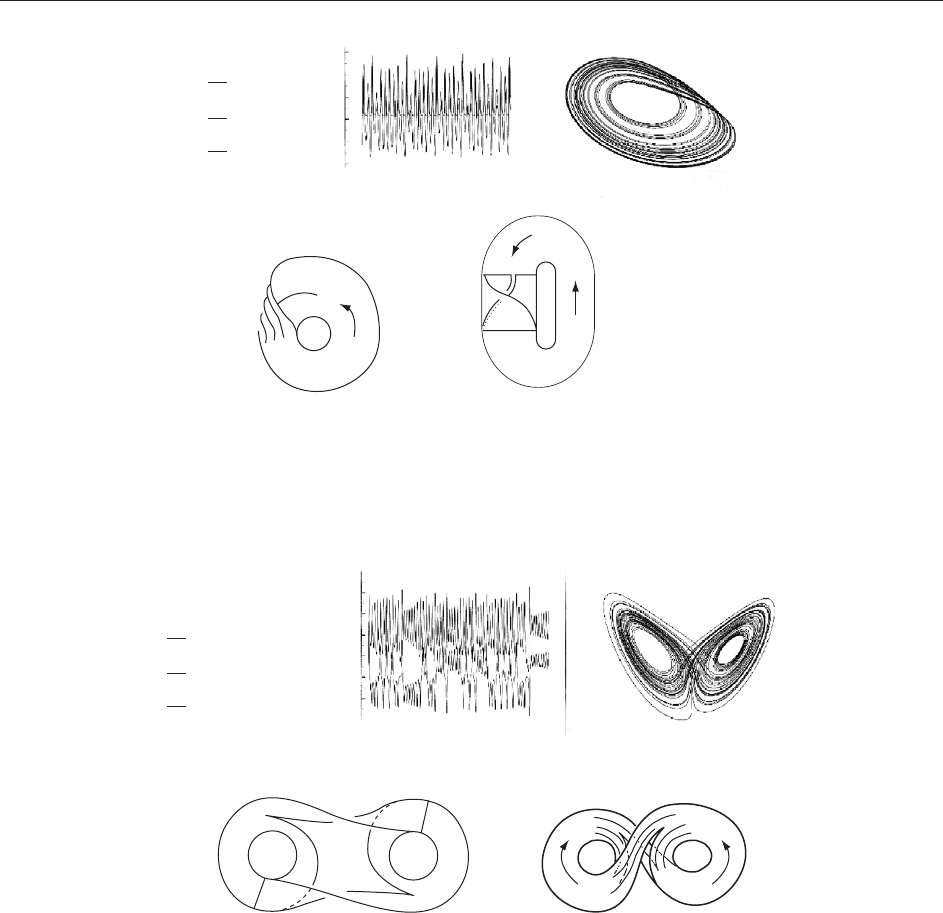
Two often-studied strange attractors are shown in
Figures 4 and 5. Figure 4 shows the details of the
Ro¨ ssler dynamical system. A similar spectrum of
features is shown in Figure 5 for the Lorenz equations.
The knot holder in Figure 5e is obtained from the
caricature in Figure 5d by twisting the right-hand lobe
by radians.
Branched manifolds can be used to characterize
all three-dimensional strange attractors. Branched
manifolds that classify the strange attractors gener-
ated by four familiar sets of equations (for some
control parameter values) are shown in Figure 6.
The sets of equations, and one set of parameter
values that generate strange attractors, are presented
in Table 1.
The beauty of this topological classification of
strange attractors is that it is apparent, just by
inspection, that there is no smooth change of
variables that will map any of these systems to any
of the others for the parameter values shown.
Branched manifolds can be described algebrai-
cally. In Figure 7 we provide the algebraic
ab
aα
αβ
αa
ba
bβ
βα
βb
ab
aααβαa
ba
bββαβb
0000 0
0011 0
0000 1
011
000
100
1100 0000
1100 0000
0000 1100
0011 0000
0000 0011
a
b
β
α
Figure 3 Figure-8 knot (dark curve) and the figure-8 branched
manifold. Transition matrix for the eight branches of the figure-8
branched manifold is also shown. Flow direction is shown by
arrows. The Topology of Chaos; R Gilmore and M Lefranc;
Copyright ª 2002, Wiley. This material is used by permission of
John Wiley & Sons, Inc.
480 Chaos and Attractors
description of two branched manifolds. Figure 7a
shows the branched manifold that describes experi-
mental data generated by many physical systems.
The mechanism is a simple stretch-and-fold defor-
mation with zero global torsion that generates a
typical Smale horseshoe. There are two branches.
The diagonal elements of the matrix identify the
local torsion of the flow through the corresponding
branch, measured in units of . Branch 0 has no
local torsion, and branch 1 shows a half-twist and
has local torsion þ1. The off-diagonal matrix
elements are twice the linking number of the
period-1 orbits in the corresponding pair of branches.
Since the period-1 orbits in these two branches do not
link, the off-diagonal matrix elements are 0. The
period-1 orbits in the branches labeled 1 and 2 in
Figure 7b have linking number þ1, so the off-diagonal
matrix elements are T(1, 2) = T(2, 1) = 2 þ1. The
array identifies the order (above, below) that the two
branches are joined at the branch line, the smaller the
value, the closer to the viewer. These two pieces of
information, four integers in Figure 7a and eight in
= x + ay
dy
dt
= b + z(x – c)
dz
dt
(a) (b) (c)
–4
–2
0
2
4
6
= –y – z
dx
dt
z(t )
x(t )
(d)
(e)
Figure 4 The Ro
¨
ssler dynamical system. (a) Ro
¨
ssler equations. (b) Time series z(t) and x(t) generated by these equations, and
(c) projection of the strange attractor onto the x–y plane. (d) Caricature of the flow and (e) knot holder derived directly from the
caricature. Control parameter values (a, b,c) = (2:0, 4:0, 0:398): The Topology of Chaos; R Gilmore and M Lefranc; Copyright ª 2002,
Wiley. This material is used by permission of John Wiley & Sons, Inc.
= Rx – y – xz
dy
dt
= –bz + xy
dz
dt
= –σx + σy
dx
dt
(a) (b)
(e) (d)
(c)
z(t )
x(t
)
50
40
30
20
10
0
–10
–20
Figure 5 (a) Lorenz equations. (b) Time series x(t) and z(t) generated by these equations, and (c) projection of the strange attractor
onto the x–y plane. (d) Caricature of the flow and (e) knot holder derived directly from the caricature by rotating the right-hand lobe by
radians. Control parameter values (R, , b) = (26:0, 10:0, 8=3): The Topology of Chaos; R Gilmore and M Lefranc; Copyright ª 2002,
Wiley. This material is used by permission of John Wiley & Sons, Inc.
Chaos and Attractors 481
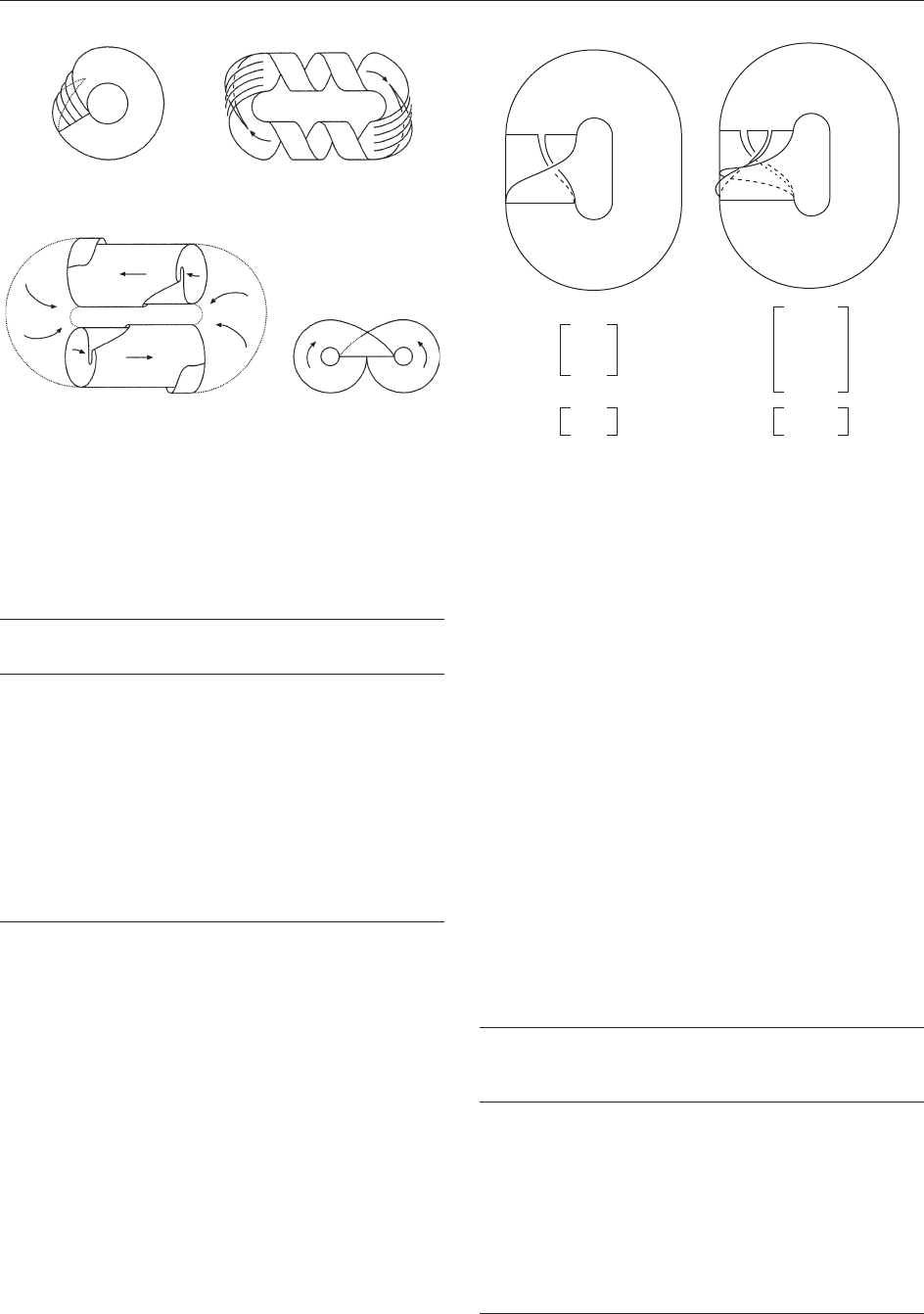
Figure 7b, serve to determine the topological organi-
zation of all the unstable periodic orbits in any
strange attractor with either branched manifold.
The periodic orbits are identified by a repeating
symbol sequence of least period p, which is unique
up to cyclic permutation. The symbol sequence
consists of a string of integers, sequentially identify-
ing the branches through which the orbit passes. For
a branched manifold with two branches, there are
two symbols. The number of orbits of period
p, N(p), obeys the recursion relation
pNðpÞ¼2
p
X
kp=2
1¼kjp
kNðkÞ½3
Table 2 shows the number of orbits of period
p 20 for the branched manifolds with two and
three branches shown in Figure 7. The number of
orbits of period p grows exponentially with p, and
the limit h
T
= lim
p !1
log (N(p))=p defines the topo-
logical entropy h
T
for the branched manifold. The
limits are ln 2 and ln 3 for the branched manifolds
with two and three branches, respectively. The
linking numbers of orbits up to period 5 in the
Smale horseshoe branched manifold are shown in
Table 3, which identifies each of the orbits by its
symbol sequence (e.g., 00111).
Table 1 Four sets of equations that generate strange attractors
Dynamical
system ODEs
Parameter
values
_
x = y z
Ro
¨
ssler
_
y = x þ ay (a, b, c) = (2:0, 4:0, 0:398)
_
z = b þ z(x c)
Duffing
_
x = y
_
y = y x
3
þ x
þA sin(!t)
(, A, !) = (0:4, 0:4, 1:0)
van der Pol
_
x = by þ (c dy
2
)x (b, c, d, A, !) =
_
y = x þ A sin(!t)(0:7, 1:0, 10:0, 0:25, =2)
_
x = x þ y
Lorenz
_
y = Rx y xz (R, , b) = (26:0, 10:0, 8=3)
_
z = bz þ xy
(a) (b)
(c) (d)
c
a
ab
c
′
a
′
b
′
b
–1
0
Figure 6 Branched manifolds for four standard sets of
equations: (a) Ro
¨
ssler equations, (b) periodically driven Duffing
equations, (c) periodically driven van der Pol equations, and
(d) Lorenz equations. The Topology of Chaos; R Gilmore and
M Lefranc; Copyright ª 2002, Wiley. This material is used by
permission of John Wiley & Sons, Inc.
00
01
0–1
000
120
220
–2 –10
01
012
(a) (b)
Figure 7 Branched manifolds are described algebraically. The
diagonal matrix elements describe the twist of each branch.
The off-diagonal matrix elements are twice the linking number of
the period-1 orbits in each of the two branches. The array
describes the order in which the branches are connected at the
branch line. (a) Smale horseshoe branched manifold. (b) Beginning
of a ‘‘gateau roule
´
’ ’ (jelly roll) branched manifold.
Table 2 Number of orbits of period p on the branched manifolds
with two and three branches, shown in Figure 7. The integers
N
3
(p) are constructed by replacing 2
p
by 3
p
in eqn [3]
Period
Two
branches
Three
branches Period
Two
branches
Three
branches
pN
2
(p) N
3
(p) pN
2
(p) N
3
(p)
1 2 3 11 186 16 104
2 1 3 12 335 44 220
3 2 8 13 630 122 640
4 3 18 14 1 161 341 484
5 6 48 15 2 182 956 576
6 9 116 16 4 080 2 690 010
7 18 312 17 7 710 7 596 480
8 30 810 18 14 532 21 522 228
9 56 2184 19 27 954 61 171 656
10 99 5880 20 52 377 174 336 264
482 Chaos and Attractors
Tables of linking numbers have been used
successfully to identify mechanisms that nature uses
to generate chaotic data. This analysis procedure is
called topological analysis. Segments of data are
identified that closely approximate unstable periodic
orbits existing in the strange attractor. These data
segments are then embedded in R
3
. Each orbit is
given a trial identification (symbol sequence). Their
pairwise linking numbers are computed either by
counting signed crossings or using the time-
parametrized data segments and estimating the
integers numerically using the Gauss linking integral
LinkðA; BÞ
¼
1
4
II
r
A
ðt
1
Þr
B
ðt
2
Þ
jr
A
ðt
1
Þr
B
ðt
2
Þj
3
dr
A
ðt
1
Þdr
B
ðt
2
Þ
This table of experimental integers is compared with
the table of linking numbers for orbits with the same
symbolic name on a trial branched manifold. This
procedure serves to identify the branched manifold
and refine the symbolic identifications of the
experimental orbits, if necessary. The procedure is
vastly overdetermined. For example, the linking
numbers of only three low-period orbits serve to
identify the four pieces of information required to
specify a branched manifold with two branches.
Since six or more surrogate periodic orbits can
typically be extracted from experimental data,
providing
6
2
= 15 or more linking numbers, this
topological analysis procedure has built-in self-
consistency checks, unlike analysis procedures
based on geometric and dynamical tools.
Basis Sets of Orbits
A branched manifold determines the topological
organization of all the periodic orbits that it
supports. Whenever a low-dimensional strange
attractor is subjected to topological analysis, it is
always the case that fewer periodic orbits are
present and identified than are allowed by the
branched manifold that classifies it. This is the case
for strange attractors generated by experimental
data as well as strange attractors generated by
ODEs. The full spectrum occurs only in the
hyperbolic limit, which has never been seen.
The orbits that are present are organized exactly
as in the hyperbolic limit – that is, as determined by
the underlying branched manifold. As control para-
meters change, the strange attractor undergoes
perestroikas. New orbits are created and/or old
orbits are annihilated in direct or inverse period-
doubling and saddle–node bifurcations. The orbits
that are present are always organized as determined
by the branched manifold. Orbits are not created or
annihilated independently of each other. Rather,
there is a partial order (‘‘forcing order’’) involved in
orbit creation and annihilation. This partial order is
poorly understood for general branched manifolds.
It is much better understood for the two-branch
Smale horseshoe branched manifold.
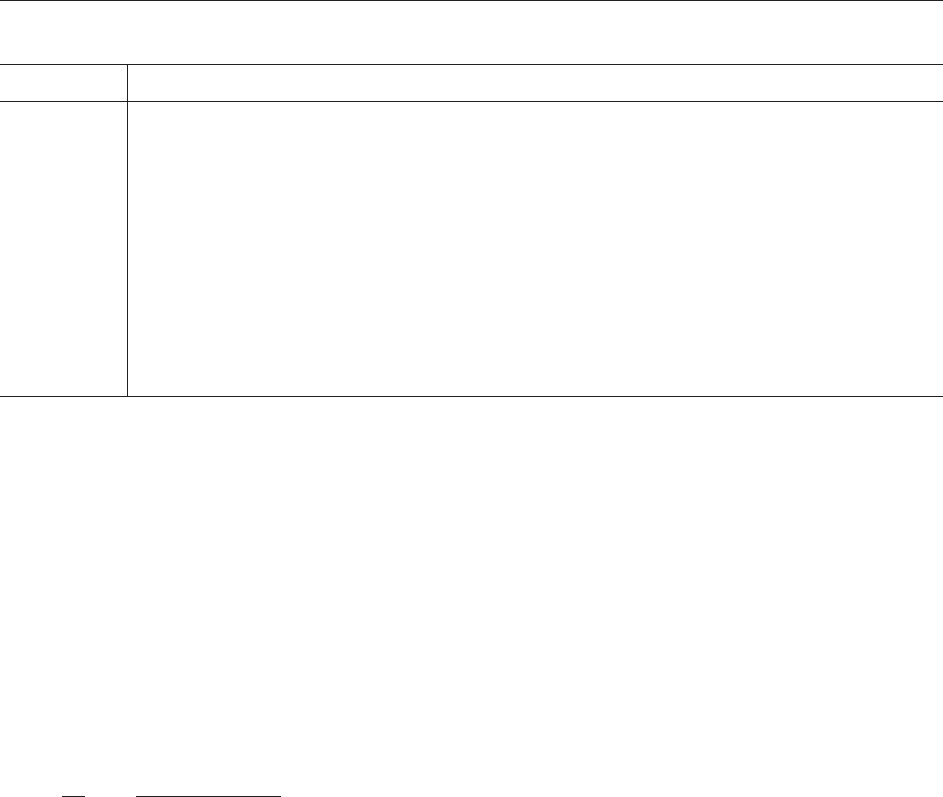
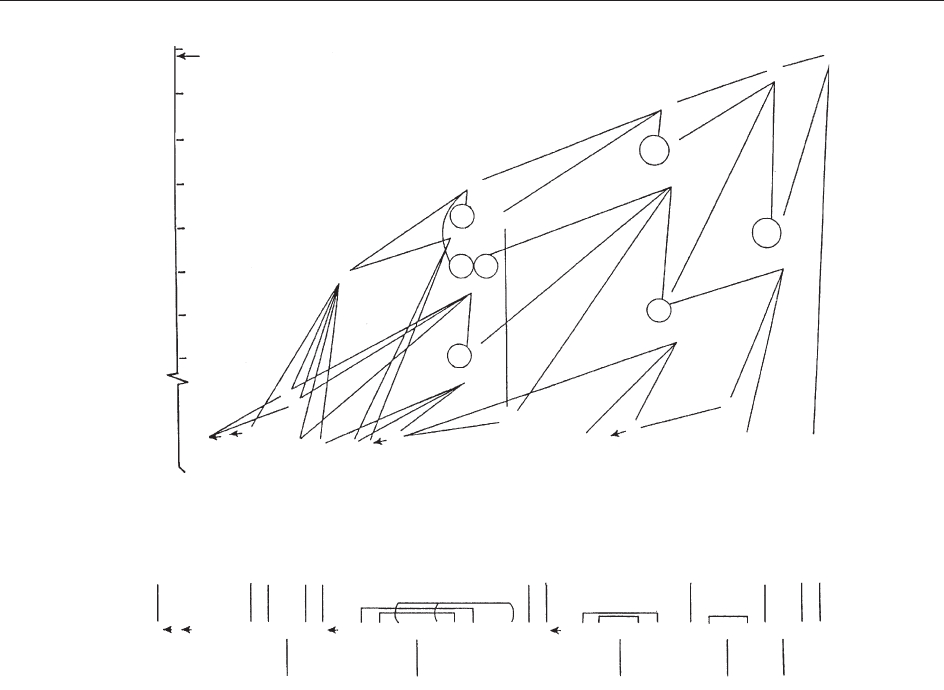
The forcing diagram for this branched manifold
is shown in Figure 8 for orbits up to period 8. It is
typically the case that the existence of one orbit in
a strange attractor forces the presence of a
spectrum of additional orbits. Forcing is transitive,
so if orbit A forces orbit B(A ) B) and B forces C,
then A forces C:ifA ) B and B ) C then A ) C.
For this reason, it is sufficient to show only the
first-order forcing in this figure. The orbits shown
are labeled by their period and the order in which
they are created in a particular highly dissipative
limit of the dynamics: the logistic map (U-sequence
order in Figure 8). For example, 5
2
describes the
second (pair) of period-5 orbits created in the
Table 3 Linking numbers of orbits to period 5 in the Smale horseshoe branched manifold with zero global torsion
012
1
3
1
3
1
4
1
4
2
4
2
5
1
5
1
5
2
5
2
5
3
5
3
000000000000000
100111211222211
2
1
0101122322443322
3
1
01101223433555533
3
1
00101232433554433
4
1
0111 0 2 344544887744
4
2
0011 0 1 233434555544
4
2
0001 0 1 233443555544
5
1
01111 0 2 4558558109955
5
1
01101 0 2 4558551088855
5
2
00111 0 2 354755986755
5
2
00101 0 2 354755987655
5
3
00011 0 1 233444555545
5
3
00001 0 1 233444555554
Chaos and Attractors 483
logistic map in the transition from simple, non-
chaotic behavior to fully chaotic (hyperbolic)
behavior.
The orbits in the forcing diagram are organized
according to their one-dimensional entropy
(horizontal axis, U-sequence order) and their two-
dimensional entropy (vertical axis). Nonchaotic
(‘‘laminar’’) behavior occurs at the lower left of
this figure, where both entropies are zero. Fully
chaotic behavior occurs at the upper right, where
both entropies are ln 2. As control parameters
change, a dynamical system that can exhibit chaos
generated by a stretch-and-fold mechanism follows a
path in the forcing diagram from the lower left to
the upper right. Each such path is a ‘‘route to
chaos.’’ The Smale horseshoe mechanism exhibits
many different routes to chaos: each follows a
different path in the forcing diagram.
The state of a strange attractor at any stage in its
route to chaos can be specified by a ‘‘basis set of
orbits.’’ This is a set of orbits whose presence forces
the existence of all other orbits that can concur-
rently be found in the attractor, up to any finite
period. The basis set of orbits can be constructed
algorithmically. The algorithm is as follows:
1. Write down all the orbits that are present in
order of increasing two-dimensional entropy
from left to right.
2. For orbits with the same two-dimensional entropy,
order by increasing one-dimensional entropy.
3. Remove the ‘‘highest’’ (rightmost) orbit from this
list, together with all the orbits that it forces.
This is the first basis orbit.
4. Of the orbits remaining, again remove the right-
most and all the orbits that it forces. This is the
second basis orbit.
5. Continue until all orbits have been removed.
For any finite period, the above algorithm
terminates because there is only a finite number of
orbits. For example, if the orbit 5
2
is present as well
as all orbits with lower one-dimensional entropy,
the basis set is 8
7
R,7
6
,7
4
F,8
6
F,8
8
,5
2
. As control
parameters change, a strange attractor undergoes
perestroikas that are quantitatively determined by
changes in the basis sets of orbits.
0.70
0.65
0.60
0.55
0.50
0.45
0.40
0.35
Other
finite order
Period
doubled
Well
ordered
Entropy
Forcing of horseshoe
orbits to period 8
8
5
F
7
3
F7
4
F
7
4
R
8
4
R
8
4
F8
7
F
8
7
R
7
3
R
8
5
R8
6
R
8
6
F
8
8
5
2
7
2
8
10
F8
11
R
8
11
F
8
13
R8
14
R
8
14
F8
13
F
7
6
R
7
6
F7
7
F
8
12
5
3
6
5
7
9
8
16
4
2
8
9
7
5
6
3
3
1
8
3
5
1
7
1
8
1
6
1
8
2
4
1
2
1
6
2
7
7
R
8
10
R
8
15
7
8
6
4
U-sequence order
(a)
(b)
2
1
4
1
8
1
6
1
8
2
7
1
5
1
7
2
8
3
3
1
6
2
8
4
7
3
8
5
5
2
8
6
7
4
6
3
8
7
8
8
7
5
4
2
8
9
7
6
8
10
6
4
8
11
7
7
8
12
5
3
8
13
7
8
8
14
6
5
8
15
7
9
8
16
2/5 1/3 1/4 1/5 1/6
1/2 1/7 1/81/61/52/7
1/43/8 1/33/7 2/5
Wo :
QOD :
ln 2
Braids
PD
f
f
Figure 8 (a) Forcing diagram for orbits up to period 8 in the Smale horseshoe branched manifold. (b) The sequence (‘‘universal
order’’) in which orbits are created in the highly dissipative limit, which is the logistic map. The Topology of Chaos; R Gilmore and
M Lefranc; Copyright ª 2002, Wiley. This material is used by permission of John Wiley & Sons, Inc.
484 Chaos and Attractors