Francoise J.-P., Naber G.L., Tsun T.S. (editors) Encyclopedia of Mathematical Physics
Подождите немного. Документ загружается.

to be fundamental when computer speeds approach
saturation. Moreove r, CAs themselves can mimic
parallel computations, see, for example, Figure 19,
where a nonlocal CA ‘‘computes’’ very efficiently the
celebrated Collatz–Ulam 3n þ 1 map.
CAs in Physics
Since Newton, physics has been described through
differential equations and continuous functions.
However, such a mathematical description is not
fit for simulation on a computer, and some
discretizations must be considered. First, one has to
discretize space and time passing from differential
equations to (finite systems of) finite difference
equations; second, one has to round off the values
of the functions to store them in the memory of the
computer. The main drawback of this procedure is
that in chaotic systems such approximations can
rapidly lead to great differences between the real
and the simulated behavior. As already noticed, this
problem does not appear in CA. Thus, one would
like to use this good characteristic of CAs in physical
modeling takin g due accoun t of the continuous
nature of the physics involved. This requires atten-
tion and ingenuity in constructing reliable CA
models for physical processes. For example, this
goal has been achieved in the so-called lattice gas
automata (LGAs).
LGAs are CA models for the microscopic
dynamics of fluids and gases. The thermodynamic
limit of these CAs yields the correct continuous
functions for the macroscopic quantities (density,
pressure, viscosity, etc.).
The first step toward LGAs was the disco very that
the HPP model developed in the 1970s by Hardy,
Pomeau and De Pazzis was in fact a CA. The HPP
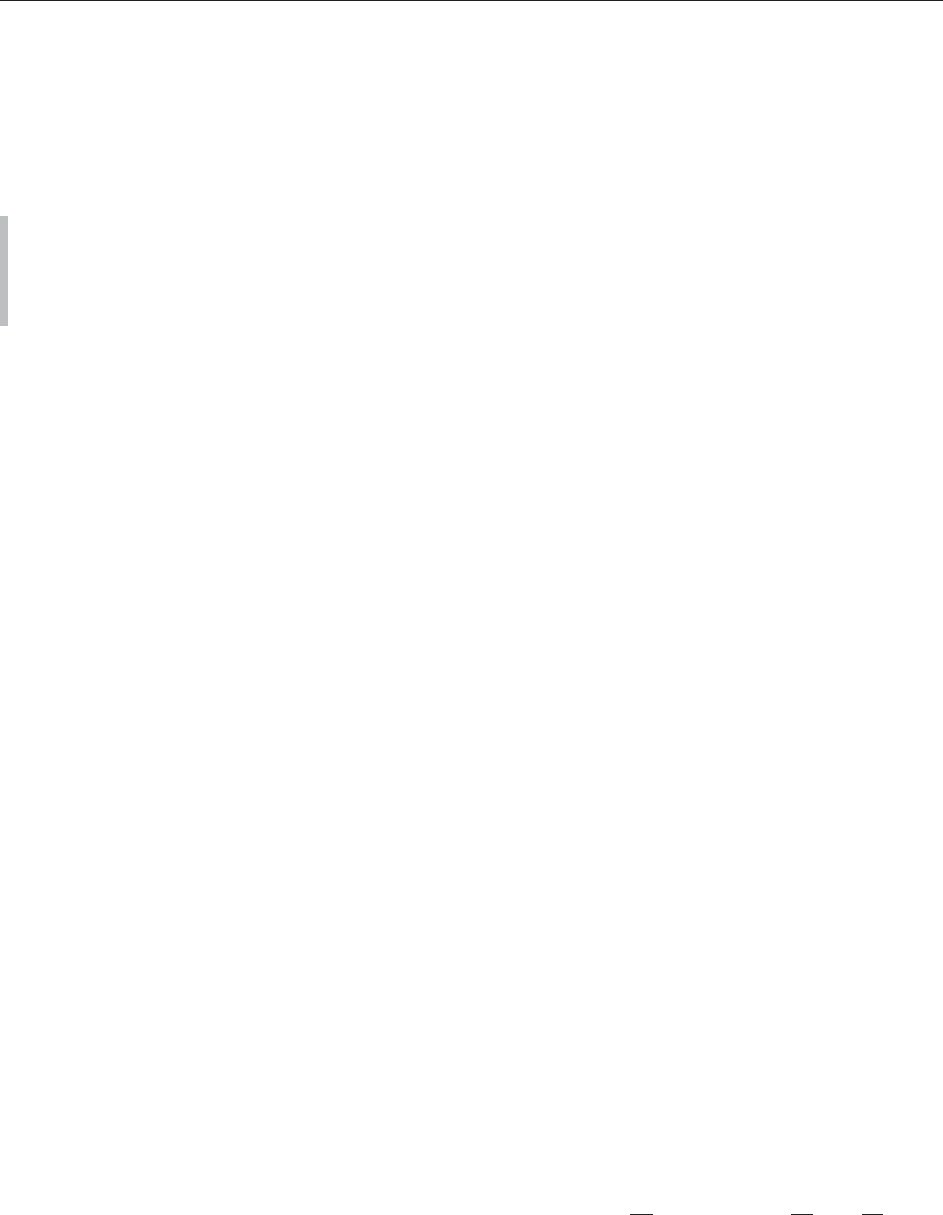
model describes the behavior of a fluid (or a gas) in
a plane. The configuration space is given by a
bidimensional square lattice and the particles are
described by arrows lying on the edges of the lattices
and pointing to some vertex (see Figure 20a).
The particles are assumed to be all identical and
with the same velocity, an d particles on the same
edge with the same direction are not allowed
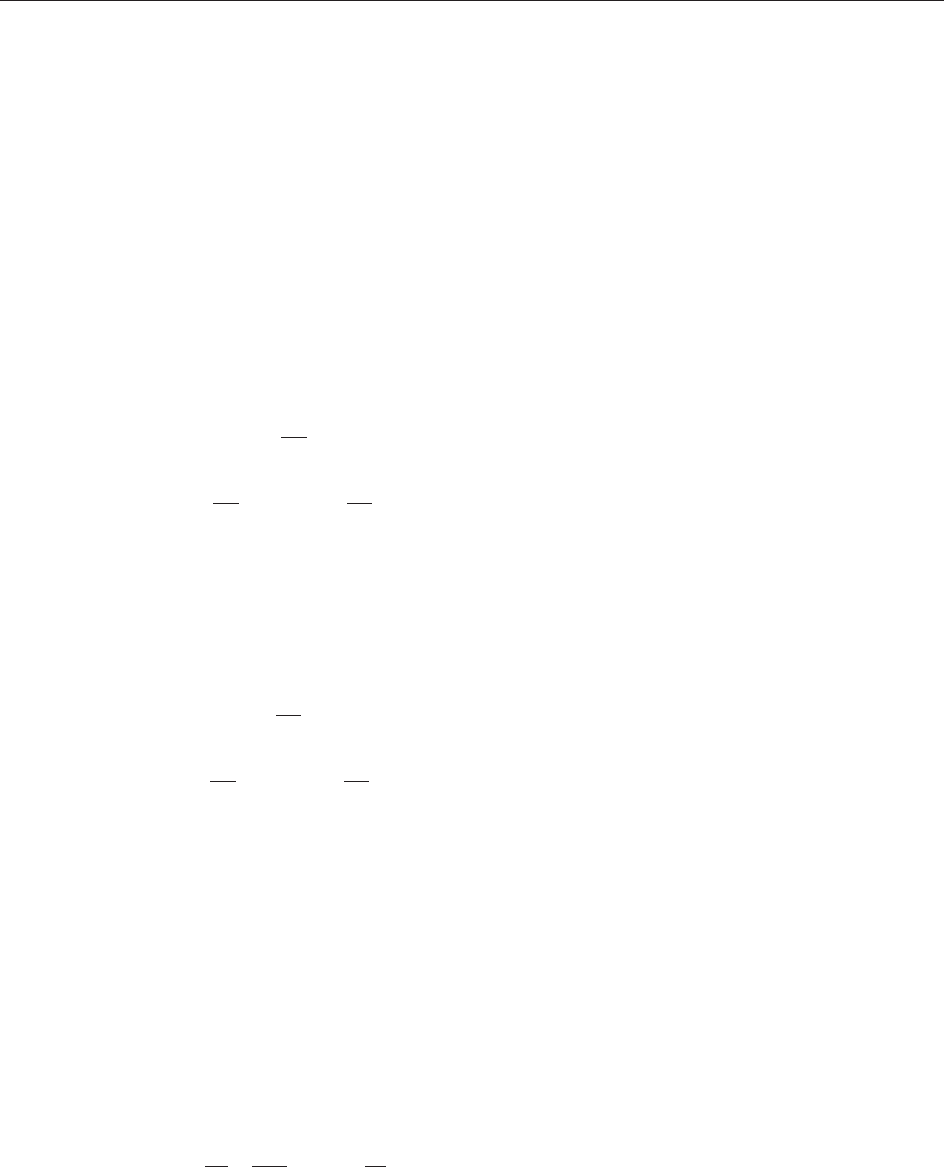
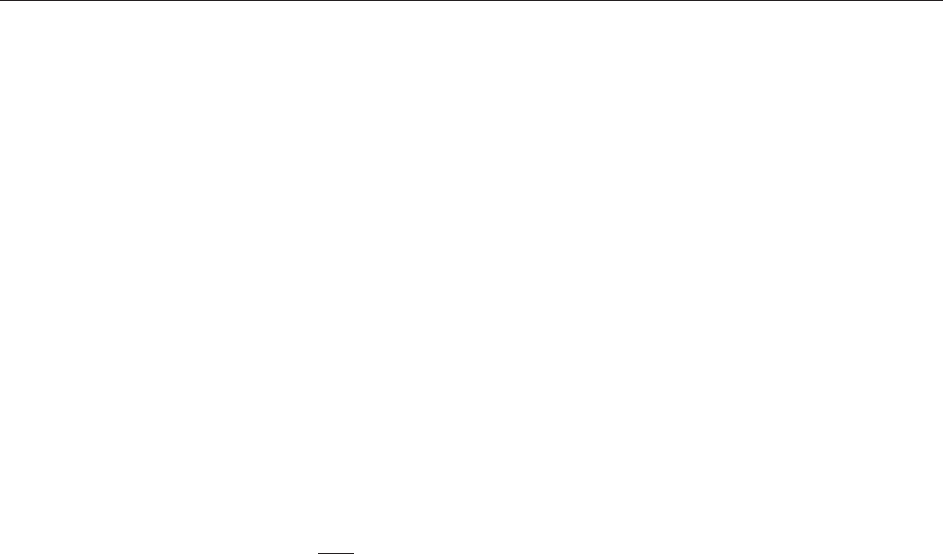
(exclusion principle). The EL prescribes that parti-
cles move with unitary velocity along the edges in
the direction pointed by the arrow (free flight)
unless there are exactly two particles on the edges
connected to a given vertex and they point in
opposite directions (collision); in this case they are
replaced by two arrows pointing outward on the
previously empty edges (see Figure 20b). Clearly,
the EL conserves the number and the momentum of
the particles.
The HPP model can be described algebraically.
The admissible particle velocities are just
c
1
¼þ
^
x; c
2
¼þ
^
y; c
3
¼
^
x; c
4
¼
^
y ½26
Figure 19 A CA that ‘‘computes’’ the 3n þ 1 Collatz–Ulam
map. The ID for the CA is the initial number for the iterated map
(binary notation, order 2
300
, randomly chosen, displayed on the
left vertical axis). The CA, according to the Collatz conjecture,
ends up to the final stable configuration (horizontal line on the
right for the CA, 1 !4 !2 !1 for the map).
(a)
(b)
Collisions
Free flight
Figure 20 (a) An example of configuration for the HPP model.
(b) Head on collisions and three particle collisions in the HPP
model.
Cellular Automata 465

Accordingly, only four bits n
j
(x, t), j = 1, 2, 3, 4, are
required to denote the presence (1) or the absence
(0) of a particle with velocity c
j
pointing vertex x at
time t. The dynamical rule for HPP can be written in
the form
n
j
ðx þ c
j
; t þ 1Þ¼n
j
ðx; tÞþ!
j
ðx; tÞ½27
where term n
j
(x, t) on the right-hand side accounts
for the free flight of particles, while !
j
(x, t) modifies
the trajectories in the case of collisions. The !
j
are
determined by the state of the system according to
the following rules:
!
1
¼n
1
ð1 n
2
Þn
3
ð1 n
4
Þ
þð1 n
1
Þn
2
ð1 n
3
Þn
4
½28a
!
2
¼n
2
ð1 n
3
Þn
4
ð1 n
1
Þ
þð1 n
2
Þn
3
ð1 n
4
Þn
1
½28b
!
3
¼n
3
ð1 n
4
Þn
1
ð1 n
2
Þ
þð1 n
3
Þn
4
ð1 n
1
Þn
2
½28c
!
4
¼n
4
ð1 n
1
Þn
2
ð1 n
3
Þ
þð1 n
4
Þn
1
ð1 n
2
Þn
3
½28d
It is plain that eqns [27] and [28] can be
interpreted as the EL for a CA.
In the thermodynamic limit, the equations govern-
ing the dynamics of the macroscopic quantities of
the fluid are given by the continuity equation and by
anisotropic Navier–Stokes equations. The aniso-
tropy in the Navier–Stokes equations is due to the
fact that the invariance group of the square lattice is
too small. This problem was solved by Frisch,
Hasslacher, and Pomeau in 1986, with the introduc-
tion of the FPP model. It turns out that a hexagonal
lattice has enough symmetries to recover the
isotropic Navier–Stokes equations in the thermo-
dynamic limit. So, the FPP model is an example of a
model where even if the microscopic dynamics is
almost a caricature of the real dynamics, the
thermodynamic limit gives rise to the correct
physical equations.
CAs have been used to simulate many other
physical processes (unfortunately, there is no space
here for a sufficiently elaborate description). The
principal fields of application are: percolation
theory, magneti sm, diffusion phenomena, sandpiles,
models of earthquakes, crystal growth, etc.
The more intriguing aspect of some even simple CAs
(e.g., CA9, CA10: see Figures 16 and 18) is their very
rich particle-like dynamics. For instance, the existence
of solitonic collisions suggested that the techniques
recently developed to find and treat ‘‘integrable’’
nonlinear dynamical systems (nonlinear continuous
and discrete evolution equations, many-body pro-
blems) could profitably be extended to find ‘‘integr-
able’’ CAs. Indeed, many such CAs have been found
that exhibit ‘‘solitons’’ and are endowed with non-
trivial conservation laws (of course, this is very
important in physical modeling). Moreover, the
above-cited similarity between certain CA behaviors
and elementary particle physics phenomena suggests
that the fundamental structure of reality (at the Planck
level) could indeed be that of a CA (cells of Plank
length, discrete time flow): attempts to construct this
underlying CA physics have been pursued.
Other Applications
CAs exhibit a great plasticity, which makes them
well suited to model systems in a wide range of
fields. This is mainly due to the fact that CAs with
very simple rules can also simulate universal Turing
machines, so that they can exhibit a very rich and
complicated overall dynamics (in principle, one
could simulate any dynamical system using a simple
CA). There is another reason for the wide applic-
ability of CA modeling even outside of physics:
namely, it is well known that algorithms, not
differential equations, are better instruments to
schematize dynamical processes for complex and
organized systems . Since simple algorithms can be
naturally implemented on CAs, the latter are very
useful for realizing simple models and simulations in
many fields: biology, economics, ecology, neural
networks, traffic models, etc.
Moreover, applications of CAs in informatics and
specifically in cryptography and data compression
have been investigated.
See also: Dynamical Systems in Mathematical Physics:
An Illustration from Water Waves; Generic Properties of
Dynamical Systems; Integrable Systems: Overview.
Further Reading
Berlekamp ER, Conway JH, and Guy R (1982) Winning Ways for
Your Mathematical Plays. London: Academic Press.
Boghosian BM (1999) Lattice gases and cellular automata. Future
Generation Computer Systems 16: 171–185.
Boon JP, Dab D, Kapral R, and Lawniczak A (1996) Lattice gas
automata for reactive systems. Physics Reports 273: 55–147.
Burks AW (ed.) (1970) Essay on Cellular Automata. Urbana:
University of Illinois Press.
Chopard B and Droz M (1998) Cellular Automata Modeling of
Physical Systems. Cambridge: Cambridge University Press.
Doolen G (ed.) (1990) Lattice Gas Methods for Partial
Differential Equations. New York: Addison-Wesley.
Gardner M (1983) Wheels, Life, and Other Mathematical
Amusements. New York: W H Freeman.
466 Cellular Automata
Jackson EA (1990) Perspectives of Nonlinear Dynamics.
Cambridge: Cambridge University Press.
Toffoli T and Margolus N (1987) Cellular Automata Machines –
A New Enviroment for Modeling. Cambridge: The MIT Press.
von Neumann J (1966) In: Burks AW (ed.) Theory of Self-
Reproducing Automata. Urbana: University of Illinois Press.
Wolfram S (2002) A New Kind of Science. Champaign: Wolfram
Media.
Central Manifolds, Normal Forms
P Bonckaert, Universiteit Hasselt, Diepenbeek,
Belgium
ª 2006 Elsevier Ltd. All rights reserved.
Introduction
We consider differentiable dynamical systems gen-
erated by a diffeomorphism or a vector field on a
manifold. We restrict to the finite-dimensional case,
although some of the ideas can also be developed in
the general case (Vanderbauwhede and Iooss 1992).
We also restrict to the behavior near a stationary
point or a periodic orbit of a flow.
Let the origin 0 of R
n
be a stationary point of a C
1
vector field X, that is, X(0) = 0. We consider the
linear approxim ation A = dX(0) of X at 0 and its
spectrum (A), which we decompose as (A) =
s
[
c
[
u
, where
s
resp.
c
resp.
u
consists of those
eigenvalues with real part <0 resp. = 0 resp. >0. If
c
= ; then there is no central manifold, and the
stationary point 0 is called hyperbolic. Let E
s
, E
c
,
and E
u
be the linear A-invariant subspaces corre-
sponding to
s
resp.
c
resp.
u
. Then R
n
= E
s
E
c
E
u
. We look for corresponding X-invariant
manifolds in the neighborhood of 0, in the form of
graphs of maps. More precisely:
Theorem 1 Let the vector field X above be of class
C
r
(1 r < 1). There exist map germs
ss
:(E
s
,0)!
E
c
E
u
,
sc
:(E
s
E
c
,0)!E
u
,
uu
:(E
u
,0)! E
s
E
c
,
cu
:(E
c
E
u
,0)!E
s
, and
c
:(E
c
,0)!E
s
E
u
of
class C
r
such that the graphs of these maps are
invariant for the flow of X. Moreover, these maps
are of class C
r
, and their linear approximation at 0
is zero, that is, their graphs are tangent to,
respectively, E
s
,E
s
E
c
, E
u
, E
c
E
u
, and E
c
. If X is
of class C
1
then
ss
and
uu
are also of class C
1
. If
X is analytic then
ss
and
uu
are also analytic.
The graph of
c
is called the (local) central
(or, center) manifold of X at 0 and it is often
denoted by W
c
. Thus, it is an invariant manifold
of X tangent at the generalized eigenspace of
dX(0) corresponding to the eigenvalues having zero
real part.
(Non) uniqueness, Smoothness
Most proofs i n the literature (Vanderbauwhede
1989) use a cutoff in order to construct globally
defined objects, and then obtain the invariant graph
as the solution of s ome fixed-point problem of a
contraction in an appropriate function space.
Although this solution is unique for the globalized
problem, this is not the case at the germ level:
another cutoff may produce a different germ of
a central manifold. In other words, locally a
central manifold might not be unique, as is
easily seen on the planar e xample x
2
@=@x
y@=@y. On the other hand, the 1-je t of the map
c
,incaseofaC
1
vector field, is unique, so if
there would exist an analyti c central manifold then
this last one is unique; in the foregoing example,
it is the x-axis. But for the (polynomial) example
(x y
2
)@=@x þ y
2
@=@y one can calculate that the
1-jet of x =
c
(y)isgivenbyj
1
c
(y) =
P
n1
n!y
nþ1
,
which has a vanishing radius of convergence, so
there is no analytic central manifold. On t he other
hand, by the Borel theorem we c an choose a
C
1
-representative for
c
. This can be generalized
in the planar case:
Proposition 1 If n = 2 and if X is C
1
and if the
1-jet of X in the direction of the central manifold
is nonzero, then this central manifold is C
1
.
In particular, if X is analytic then the central
manifold is either an analytic curve of stationary
points or is a C
1
curve along which X has a
nonzero jet.
For proofs and additional reading, the reader is
referred to Aulbach (1992). In general, a central
manifold is not necessarily C
1
(van Strien 1979,
Arrowsmith and Place 1990): for the system in
R
3
given by
ðx
2
z
2
Þ
@
@x
þðy þ x
2
z
2
Þ
@
@y
þ 0
@
@z
one can find a C
k
central manifold for every k but
there is no C
1
central manifold. Indeed, in this case
the domain of definition of
c
shrinks to zero when
k tends to infinity.
Central Manifolds, Normal Forms 467
Central Manifold Reduction
The importance of a central manifold lies in the
principle of central manifold reduction, which
roughly says that for local bifurcation phenomena
it is enough to study the behavior on the central
manifold, that is, if two vector fields, restricted to
their central manifolds, have homeomorphic integral
curve portraits, and if the dimensions of E
s
and E
u
are equal, then the two vector fields have home-
omorphic integral curve portraits in R
n
, at least
locally near 0. Let us be more precise:
Theorem 2 Let m be the dimension of E
c
. There
exists p,0 p n m, such that X is locally
C
0
-conjugate to
X
0
¼
X
m
i¼1
~
X
i
ðz
1
; ...; z
m
Þ
@
@z
i
þ
X
mþp
i¼mþ1
z
i
@
@z
i
X
n
i¼mþpþ1
z
i
@
@z
i
where (z
1
, ..., z
m
) is a coordinate system on a
central manifold,(z
1
, ..., z
n
) is a coordinate system
on R
n
extending (z
1
, ..., z
m
) and
P
m
i = 1
~
X
i
@=@z
i
is the restriction of X to a central manifold.
Moreover, if
Y ¼
X
m
i¼1
~
Y
i
ðz
1
; ...; z
m
Þ
@
@z
i
þ
X
mþp
i¼mþ1
z
i
@
@z
i
X
n
i¼mþpþ1
z
i
@
@z
i
and if
P
m
i = 1
~
Y
i
@=@z
i
is C
0
-equivalent (resp. C
0
-
conjugate) to
P
m
i = 1
~
X
i
@=@z
i
then X is C
0
-equivalent
(resp. -conjugate) to Y.
For a proof and further reading (a generalization)
see Palis and Takens (1977).
In case that more smoothness than just C
0
is
needed, we have the principle of normal lineariza-
tion along the central manifold. More concretely, let
x denote a coordinate in the central manifold and
let y be a complementary variable, that is, let
X = X
c
@=@x þ X
h
@=@y. We define the normally
linear part along the central manifold by
NX :¼ X
c
ðx; 0 Þ
@
@x
þ
@X
h
@y
ðx; 0Þy
@
@y
Under certain nonresonance conditions (Takens
1971, Bonckaert 1997) on the real parts of the
eigenvalues of dX(0), there exists a C
r
local
conjugacy between X and NX for each r 2 N
(assuming X to be of class C
1
). If there are
resonances, then one can conjugate with the
so-called seminormal or renormal form containing
higher-order terms (see Bonckaert (1997 , 2000) and
references therein; here one can also find results for
cases where extra constraints should be respected,
like symmetry, reversibility, or invariance of some
given foliation etc.).
Parameters
Having an eigenvalue with zero real part is
ungeneric, so in bifurcation problems we consider
p-parameter families X
near, say, = 0. With
respect to the results above, we remark that such a
family can be considered as a vector field near
(0, 0) 2 R
n
R
p
tangent to the leaves R
n
{}. In
fact, the parameter direction R
p
is contained in E
c
.
In all the results mentioned, this structure ‘‘of being
a family’’ is respected. For example, in Theorem 2
we replace
~
X
i
(z
1
, ..., z
m
)by
~
X
i
(z
1
, ..., z
m
, ). Hence,
if
~
X
is a versal unfolding of
~
X
0
then X
is a versal
unfolding of X
0
. By this, the search for versal
unfoldings is reduced to the unfolding of singula-
rities whose linear approximation at 0 has a purely
imaginary spectrum.
Diffeomorphisms, Periodic Orbits
A completely analogous theory can be developed for
fixed points of diffeomorphisms f :(R
n
,0)! R
n
.
Here we split up the spectru m of the linear part
L = df (0) at 0 as (L) =
s
[
c
[
u
, where
s
resp.
c
resp.
u
consists of those eigenvalues with
modulus <1 resp. = 1 resp. >1. This theory can be
applied to the time-t map of a vector field (and will
give the same invariant manifolds) and to the
Poincare´ map of a transversal section of a period ic
orbit of a vector field (Chow et al. 1994).
Normal Forms
The general idea of a normal form is to put a
(complicated) system into a form ‘‘as simple as
possible’’ by means of a change of coordinates. This
idea was already developed to a great extent by
H Poincare´. Simple examples are: (1) putting a square
matrix into Jordan form, (2) the flow box theorem
(Arrowsmith and Place 1990) near a nonsingular
point. Depending on the context and on the purpose
of the simplification, this concept may vary greatly. It
depends on the kind of changes of coordinates that are
tolerated (linear, polynomial, formal series, smooth,
analytic) and on the possible structures that must be
preserved (e.g., symplectic, volume-preserving, sym-
metric, reversible etc.). Let us restrict to local normal
forms, that is, in the vicinity of a stationary point of a
vector field or a diffeomorphism (the latter can be
468 Central Manifolds, Normal Forms

applied to the Poincare´ map of a periodic orbit). We
concentrate on the simplification of the Taylor series.
The general idea is to apply consecutive polynomial
changes of variables; at each step we simplify terms of
a degree higher than in the step before. The ideal
simplification would be to put all higher-order terms
to zero, which would (at least at the level of formal
series) linearize the system. But as soon as there are
resonances (see below), this is impossible: the planar
system 2x@=@x þ (y þ x
2
)@=@y cannot be formally
linearized.
Setting
Let X be a C
rþ1
vector field defined on a neighbor-
hood of 0 2 R
n
, and denote A = dX(0) (its linear
approximation at 0). The Taylor expansion of X at
0 takes the form
XðxÞ¼A x þ
X
r
k¼2
X
k
ðxÞþOðjxj
rþ1
Þ
where X
k
2 H
k
, the space of vector fields whose
components are homogeneous polynomials of
degree k. The classical formal normal-form theorem
is as follows. We define the operator L
A
on H
k
by
putting L
A
h(x) = dh(x) A x A h(x); one calls L
A
the homological operator. One checks that
L
A
(H
k
) H
k
. One also denotes this by ad A(h)(x):
see further in the Lie algebra setting. Let R
k
be the
range of L
A
, that is, R
k
= L
A
(H
k
). Let G
k
denote any
complementary subspace to R
k
in H
k
. The formal
normal-form theorem states, under the above
settings:
Theorem 3 (Chow et al. 1994, Dumortier 1991)
There exists a composition of near identity changes
of variables of the form
x ¼ y þ
k
ðyÞ½1
where the components of
k
are homogeneous
polynomials of degree k, such that the vector field
X is transformed into
YðyÞ¼A y þ
X
r
k¼2
g
k
ðyÞþOðjyj
rþ1
Þ
where g
k
2 G
k
, k = 2, ..., r.
Sometimes this theorem is applied to the restric-
tion of a vector field to its central manifold, for
reasons explained in the last section. This is the
reason why we did not assume X to be C
1
;inthe
latter case one can let r !1and obtain a normal
form on the level of formal Taylor seri es (also called
1-jets). Using a theorem of Borel, we infer the
existence of a C
1
change of variables such that
the Taylor series of
(X)isA y þ
P
1
k = 2
g
k
(y). For
practical computations, it is often appropriate to
first simplify the linear part A and to diagonalize it
whenever possible. Hence, it is convenient to use a
complexified setting and to use complex polyno-
mials or power series. One can show that all
involved changes of variables preserve the property
of ‘‘being a complex system coming from a real
system,’’ that is, at the final stage we can return to a
real system (see, e.g., Arrowsmith and Place (1990)
for a more precise mathematical description).
Hence, we can assume that A is an upper
triangular matrix. Let the eigenvalues be
1
, ...,
n
.
It can be calculated that the eigenvalues of L
A
,asan
operator H
k
! H
k
, are then the num bers h, i
j
where 2 N
n
,
P
n
j = 1
j
= k and 1 j n. Hence, if
these would all be nonzero then B
k
= H
k
, and then
we have an ideal simplification, that is, all g
k
equal
to zero. However, if such a number is zero, that is,
h; i
j
¼ 0 ½2
it is called a resonance between the eigenvalues. In
such a case, we have to choose a complementary
space G
k
. From linear algebra it follows that one
can always choose
G
k
¼ kerðL
A
Þ½3
where A
is the adjoint operator. But this choice [3] is
not unique and is, from the computational point of
view, not always optimal, especially if there are
nilpotent blocks. This fact has been exploited by
many authors. A typical example is the case where
A = y@=@x. On the other hand, if A is semisimple we
can choose the complementary space to be ker(L
A
), so
L
A
g
k
= 0; we can assume it to be the (complex)
diagonal[
1
, ...,
n
]. In that case we can be more
explicit as follows. Let e
j
= @=@x
j
denote the standard
basis on C
n
. For a monomial one can calculate that
L
A
ðx
e
j
Þ¼ðh; i
j
Þx
e
j
½4
If the latter is zero, then the monomial is called
resonant. This implies that the normal form can be
chosen so that it only contains resonant mon omials.
Putting a system into normal form not only
simplifies the original system, it also gives more
geometric insight on the Taylor series. To be more
precise, suppose (for simplicity, this can be genera l-
ized (Dumortier 1997)) that A is semisimple. One
can calculate that the condition L
A
g
k
= 0 implies:
exp (At)g
k
( exp (At)x) = g
k
(x) for all t 2 R. This
means that g
k
is invariant for the one-parameter
group exp(At). A typical example in the plane
is: A has eigenvalues i, i. Note that the (only)
resonances are h(i , i), (p þ 1, p)ii = 0 and
Central Manifolds, Normal Forms 469

h(i, i), (p, p þ 1)iþi = 0 for all p 2 N.We
suppose that the original system was real, that is,
on R
2
; we can choose linear coordinates such that
for z = x þ iy,
z = x iy the linear part is
A = diagonal[i, i ]. Applying the remarks above,
we conclu de that the normal form only contains the
monomials (z
z)
p
z@=@z and (z
z)
p
z@=@
z. The geo-
metric interpretation here is that these monomials
are invariant for rotat ions around (0, 0). This can
also be seen on the real variant of this: the Taylor
series of the (real) normalized system has the
form ( þ f (x
2
þ y
2
))(x@=@y y@=@x) þ g(x
2
þ y
2
)
(x@=@x þ y@=@y) and is invariant for rotations.
Warning: the dynamic behavior of a formal normal
form in the central manifold can be very different
from that of the original vector field, since we are
only looking at the formal level. A trivial example is
(take f = g = 0 in the foregoing example) X(x, y) =
(x@y y@x) exp (1=(x
2
))@=@x, where orbits
near (0, 0) spiral to (0, 0), whereas the normal form
is just a linear rotation. This difference is due to the
so-called flat terms, that is, the difference between
the transformed vector field and a C
1
-realization of
its normalized Taylor series (or polynomial). In case
of analyticity of X, one can ask for analyticity of the
normalizing transformation . Generically, this is
not the case in many situations. The precise meaning
of this ‘‘genericity condition’’ is too elaborate to
explain in this brief review article. We provide some
suggestions for further reading in the next section.
One could roughly say that, in the central manifold,
the normal form has too much symmetry and is too
poor to model more complicated dynamics of the
system, which can be ‘‘hidden in the flat terms.’’ To
quote Il’yashenko (1981): ‘‘In the theory of normal
forms of analytic differential equations, divergence
is the rule and convergence the exception ....’’
In many applications, we want to preserve some
extra structure, such as a symplectic structure, a
volume form, some symmetry, reversibility, some
projection etc.; the case of a projection is important
since it includes vector fields depending on a para-
meter. Sometimes a superposition of these structures
appears (e.g., a family of volume-preserving systems).
We would like that the normal-form procedure
respects this structure at each step. One can often
formulate this in terms of vector fields belonging to
some Lie subalgebra L
0
. The idea is then to use
changes of variables like [1], where
k
is then generated
by a vector field in L
0
. This will guarantee that all
changes of variables are ‘‘compatible’’ with the extra
structure. Unlike the general case where we could
work with monomials as in [4], we will have to
consider vector fields h
k
in L
0
whose components are
homogeneous polynomials of degree k.Ifthiscanbe
done, one says that L
0
respects the grading by the
homogeneous polynomials. In order to fix ideas,
suppose that L
0
are the divergence-free planar vector
fields. Note that a monomial x
i
y
j
@=@x is not diver-
gence free. We can instead use time mappings of
homogeneous vector fields of the form a(q þ
1)x
pþ1
y
q
@=@x a( p þ 1) x
p
y
qþ1
@=@y.Uptoterms
of higher order we can use the time-one map of h
k
instead of x þ h
k
(x). In case that one asks for a C
1
-
realization of the normalizing transformation, we need
an extra assumption on the extra structure, that is, on
L
0
, called the Borel property: denote by J
1,0
the set of
formal series such that each truncation is the Taylor
polynomial of an element of L
0
. The extra assumption
is: each element of J
1,0
must be the Taylor series of a
C
1
vector field in L
0
. It can be proved (Broer 1981)
that the following structures respect the grading and
satisfy the Borel property: being an r-parameter family,
respecting a volume form on R
n
, being a Hamiltonian
vector field (n even), and being reversible for a linear
involution.
One could consider other types of grading of the
Lie-algebras involved.
This method, using the framework of the so-called
filtered Lie algebras, is explained and developed
systematically in a more general and abstract
context in Broer (1981).
In nonlocal bifurcations, such as near a homo-
clinic loop, for example, it is not enough to perform
central manifold reduction near the singularity: a
simplified smooth model in a full neighborhood of
the singularity is often needed, for example, in order
to compute Poincare´ maps.
Let us start with the ‘‘purely’’ hyperbolic case (i.e.,
dim E
c
= 0). First we compute the formal normal
form such as the above. If there are no resonances
[2] then we can formally linearize the vector field X.
If X is C
1
then a classical theorem of Sternberg
(1958) states that this linearization can be realized
by a C
1
change of variables (i.e., no more flat terms
remaining). In case there are resonances, we must
allow nonlinear terms: the resonant monomials. In
this case we can also reduce C
1
to this normal form.
Using the same methods, it is also possible to reduce
to a polynomial normal form, but this time using
C
k
(k < 1) changes of variables. More precisely, if k
is a given number and if we write the vector field as
X = X
N
þ R
N
, where X
N
is the Taylor polynomial
up to order N (which can be assumed to be in
normal form) and where R
N
(x) = O(jxj
Nþ1
), then for
N sufficiently large there is a C
k
change of variables
conjugating X to X
N
near 0. The number N depends
on the spectrum of A = dX(0). An elegant proof of
these facts can be found in Il’yashenko and Yakovenko
(1991). For the case when extra structure must be
470 Central Manifolds, Normal Forms
preserved, see Bonckaert (1997), which also deals with
the partially hyperbolic case (dim E
c
1). As already
remarked above, the case of a parameter-dependent
family can be regarded as a partially hyperbolic
stationary point preserving this extra structure.
The question of an analytic normal form, also in
the hyperbolic case, leads to convergence questions
and calls upon the so-called small-divisor problems.
The classical results are due to Poincare´ and Siegel.
Let us summarize them; they are formulated in the
complex analytic setting:
Theorem 4
(i) If the convex hull of the spectrum of A does not
contain 0 2 C then X can locally be put into
normal form by an analytic change of variables.
Moreover, this normal form is polynomial.
(ii) If the spectrum {
1
, ...,
n
} of A satisfies the
condition that there exists C > 0 and >0 such
that for any m 2 N
n
with
P
j
m
j
2:
jhð
1
; ...;
n
Þ; mi
j
j
C
jmj
½5
for 1 j n then X can be locally linearized by
an analytic change of variables.
Note that case (i) contains the case where 0 is a
hyperbolic source or sink. This case (i) in Theorem 4
can be extended if there are parameters: if X
depends analytically on a parameter " 2 C
p
near
" = 0 then the change of variables is also analytic in
"; moreover, the normal form is then a polynomial
in the space variables whose coefficients are analy-
tically dependent on the parameter " .
For case (ii) this is surely not the case, since the
condition [5] is fragile: a small distortion of the
parameter generically causes resonanc es, be it of a
high order. To fix ideas, consider n = 2 and suppose
1
< 0 <
2
. By a generic but arbitrary small
perturbation, we can have that the ratio of these
eigenvalues becomes a negative rational number
p=q, which gives a resonance of the form [2]
with j = 1 and = (q þ 1, p), so [5] is violated.
So analytic linearization, or even a polynomial
analytic normal form, is ungeneric for families of
such hyperbolic stationary points. The search for
analytic normal forms, that is, simplified models, for
families is still under investigation. A first simplifica-
tion is obtained via the stable and unstable manifold
from Theorem 1, that is, the graphs of
ss
and
uu
.
When X is analytic near 0 then these manifolds are
also analytic. So, up to an analytic change of variables,
we can assume that E
s
and E
u
are invariant, which
gives a simplification of the expression of X.More-
over, there is analytic dependence on parameters.
For local diffeomorphisms there are completely
similar theorems pertaining to all the cases consid-
ered above.
Concluding Remarks
The concept of central manifold can be extended to
more general invariant sets (see Chow et al. (2000)
and references therein). It can also be extended to
the infinite-dimensional case and can be applied to
partial differential equations (Vanderbauwhede and
Iooss 1992).
Concerning the generic divergence of normalizing
transformations, the reader is referred to Broer and
Takens (1989), Bruno (1989), Il’yashenko (1981),and
Il’yashenko and Pyartli (1991). Although the power
series giving the normalizing transformation generally
diverges, the study of the dynamics is often performed
by truncating the normal form at a certain order.
Recently, Iooss and Lombardi (2005) considered the
question as to what an optimal truncation is. It is
shown, in case dX(0) is semisimple, that the order of
the normal form can be optimized so that the remainder
satisfies some estimate shrinking exponentially fast to
zero as a function of the radius of the domain.
Concerning normal forms preserving the
Hamiltonian structure, see Birkhoff (1966) and
Siegel and Moser (1995) for a starting point; this is
an extended subject on its own, sometimes called
Birkhoff normal form, and it would require another
review article.
Further simplifications of the normal form can
sometimes be obtained by taking into account
nonlinear terms (instead of just A) in order to obtain
reductions of higher-order terms (see Gaeta (2002)
and especially the references therein).
Applications of normal forms and central mani-
folds to bifurcation theory have been explained in
Dumortier (1991).
See also: Averaging Methods; Bifurcation Theory;
Dynamical Systems and Thermodynamics; Dynamical
Systems in Mathematical Physics: An Illustration from
Water Waves; Finite Group Symmetry Breaking;
Korteweg–de Vries Equation and Other Modulation
Equations; Multiscale Approaches; Normal Forms and
Semiclassical Approximation; Symmetry and Symmetry
Breaking in Dynamical Systems.
Further Reading
Arrowsmith D and Place C (1990) Dynamical Systems. Cambridge:
Cambridge University Press.
Aulbach B (1992) One-dimensional center manifolds are C
1
.
Results in Mathematics 21: 3–11.
Central Manifolds, Normal Forms 471

Birkhoff GD (1966) Dynamical Systems. With an addendum by
Jurgen Moser. American Mathematical Society Colloquium
Publications, vol. IX. Providence, RI: American Mathematical
Society.
Bonckaert P (1997) Conjugacy of vector fields respecting
additional properties. Journal of Dynamical and Control
Systems 3: 419–432.
Bonckaert P (2000) Symmetric and reversible families of vector
fields near a partially hyperbolic singularity. Ergodic Theory
and Dynamical Systems 20: 1627–1638.
Broer H (1981) Formal normal forms for vector fields and some
consequences for bifurcations in the volume preserving case.
In: Dynamical Systems and Turbulence, Warwick 1980,
vol. 898, Lecture Notes in Mathematics. New York: Springer.
Broer H and Takens F (1989) Formally symmetric normal forms
and genericity. Dynamics Reported. A Series in Dynamical
Systems and their Applications 2: 11–18.
Bruno AD (1989) Local Methods in Nonlinear Differential
Equations. New York: Springer.
Chow S-N, Li C, and Wang D (1994) Normal Forms and
Bifurcations of Planar Vector Fields. Cambridge: Cambridge
University Press.
Chow S-N, Liu W, and Yi Y (2000) Center manifolds for invariant
sets. Journal of Differential Equations 168: 355–385.
Dumortier F (1991) Local study of planar vector fields: singula-
rities and their unfoldings. In: Van Groesen E and De Jager EM
(eds.) Structures in Dynamics, Studies in Mathematical Physics,
vol. 2, pp. 161–241. Amsterdam: Elsevier.
Gaeta G (2002) Poincare´ normal and renormalized forms. Acta
Applicandae Mathematicae 70(1–3): 113–131 (symmetry and
perturbation theory).
Il’yashenko YS (1981) In the theory of normal forms of analytic
differential equations violating the conditions of Bryuno
divergence is the rule and convergence the exception. Moscow
University Mathematical Bulletin 36(2): 11–18.
Il’yashenko YS and Pyartli AS (1986) Materialization of reso-
nances and divergence of normalizing series for polynomial
differential equations. Journal of Mathematical Sciences
32(3): 300–313.
Il’yashenko YS and Yakovenko SY (1991) Finitely smooth normal
forms of local families of diffeomorphisms and vector fields.
Russian Mathematical Surveys 46: 1–43.
Iooss G and Lombardi E (2005) Polynomial normal forms with
exponentially small remainder for analytic vector fields.
Journal of Differential Equations 212: 1–61.
Palis J and Takens F (1977) Topological equivalence of normally
hyperbolic dynamical systems. Topology 16(4): 335–345.
Siegel CL and Moser JK (1971) Lectures on Celestial Mechanics,
(reprint 1995). Berlin: Springer.
Sternberg S (1958) On the structure of local homeomorphisms of
Euclidean n-space. II. American Journal of Mathematics
80: 623–631.
Takens F (1971) Partially hyperbolic fixed points. Topology
10: 133–147.
Vanderbauwhede A (1989) Center manifolds, normal forms and
elementary bifurcations. In: Kirchgraber U and Walther O
(eds.) Dynamics Reported, vol. 2, pp. 89–169. New York:
Wiley.
Vanderbauwhede A and Iooss G (1992) Center manifold theory in
infinite dimensions. In: Jones CKRT et al. (eds.) Dynamics
Reported, vol. 1, New Series, pp. 125–163. Berlin: Springer.
Channels in Quantum Information Theory
M Keyl, Universita
`
di Pavia, Pavia, Italy
ª 2006 Elsevier Ltd. All rights reserved.
Introduction
Consider a typical quantum system such as a string
of ions in a trap. To ‘‘process’’ the quantum
information the ions carry, we have to perform in
general many steps of a quite different nature.
Typical examples are: free time evolution (including
unwanted but unavoidable interactions with the
environment), controlled time evolution (e.g., the
application of a ‘‘quantum gate’’ in a quantum
computer), preparations and measurements. Each
processing step can be described by a channel which
transforms input systems into output system of a
possibly different type (e.g., a measurement trans-
forms quantum systems into classi cal information).
Systems, States, and Algebras
To get a unified mathematical description of systems
of different physical nature, it is useful to consider
C
-algebras (which are, in our case, always finite
dimensional): quantum systems can be represented
in terms of the algebra B(H) of (bounded) operators
on the Hilbert space H= C
d
; for classical informa-
tion we have to choose the set C(X) of (continuous),
complex-valued functions on the finite alphabet X;
and the tensor product of both B(H) C( X)
describes hybrid systems which are half-classical
and half-quantum. Assume now that A is one of
these algebras. Effects (i.e., yes/no measurements on
the system in question) are then described by A 2A
satisfying 0 A 1, stat es are positive, normalized
linear functionals ! : A!C, and the probability to
get the result ‘‘yes’’ during an A measurement on a
system in the state ! is given by !(A). Since A is
assumed to be finite dimensional, each state ! on
B(H) is represented by a density operator , that is,
!(A) = tr(A). Likewise, a state ! on C(X) has the
form !(A) =
P
x
A(x)p
x
, where ( p
x
)
x2X
denotes a
probability distribution on X, and a state ! on
B(H) C(X) is described by a sequence (
x
)
x2X
of
positive (trace-class) operators on B(H) with
P
x
tr(
x
) = 1 such that !(A) =
P
x
tr(
x
A
x
). Here
472 Channels in Quantum Information Theory

we have used the fact that an element A 2B(H)
C(X) can be represented in a canonical way by a
sequence (A
x
)
x2X
of operators on H. The set of
states will be denoted in the following by S(A) and
the set of effects by E(A).
Completely Positive Maps
Our aim is now to get a mathematical object which
can be used to describe a channel. To this end,
consider two C
-algebras, A, B, describing the input
and output system, respectively, and an effect A 2B
of the output system. If we invoke first a channel
which transforms A systems into B systems, and
measure A afterwards on the output systems, we end
up with a measurement of an effect T(A) on the
input systems. Hence, we get a map T : E(B) !E(A)
which completely describes the channel (note that
the direction of the mapping arrow is reversed
compared to the natural ordering of processing).
Alternatively, we can look at the states and interpret
a channel as a map T
: S(A) !S(B) which trans-
forms A systems in the state 2S(A) into B systems
in the state T
(). To distinguish between both
maps, we can say that T describes the channel in the
Heisenberg picture and T
in the Schro¨ dinger
picture. On the level of the statistical interpretation,
both points of view should coincide of course, that
is, the probabilities (T
)(A)and(TA) to get the
result ‘‘yes’’ during an A measurement on B systems
in the state T
, respectively a TA measurement on
A systems in the state , should be the same. Since
(T
)(A) is linear in A, we see immediately that T
must be an affine map, that is, T(
1
A
1
þ
2
A
2
) =
1
T(A
1
) þ
2
T(A
2
) for each convex linear combina-
tion
1
A
1
þ
2
A
2
of effects in B, and this in turn
implies that T can be extended naturally to a linear
map, which we will identify in the following with
the channel itself, that is, we say that Tisthe
channel.
Let us now change slightly our point of view and
start with a linear operator T : A!B.Tobea
channel, T must map effects to effects, that is, T has
to be positive: T(A) 0 8A 0 and bounded from
above by 1,thatis,T(1) 1. In addition, it is natural
to require that two channels in parallel are again a
channel. More precisely, if two channels T : A
1
!B
1
and S : A
2
!B
2
are given, we can consider the map
T S which associates to each A B 2A
1
A
2
the
tensor product T(A) S(B)2B
1
B
2
. It is natural to
assume that T S is a channel which converts
composite systems of type A
1
A
2
into B
1
B
2
systems. Hence, S T should be positive as well.
Definition 1 Consider two observable algebras
A, B and a linear map T : A!BB(H).
(i) T is called positive if T(A) 0 holds for all
positive A 2A.
(ii) T is called completely positive (CP) if T
Id : AB(C
n
) !B(H) B(C
n
) is positive for
all n 2 N. Here Id denotes the identity map
on B(C
n
).
(iii) T is called unital if T(1) = 1 holds.
Consider now the map T
: B
!A
which is dual
to T,thatis,T
(A) = (TA) for all 2B
and A 2A.
It is called the Schro¨ dinger-picture representation of
the channel T, since it maps states to states provided T
is unital. (Complete) positivity can be defined in the
Schro¨ dinger picture as in the Heisenberg picture, and
we immediately see that T is (completely) positive iff
T
is.
It is natural to ask whether the distinction
between positivity and complete positivity is
really necessary, that is, whether there are
positive maps which are not CP. If at least one
of the algebras A or B is classical, the answer is
no: each positive map is CP in this case. If both
algebras are quantum however, complete positiv-
ity is not implied by positivity alone. The most
prominent example for this fact is the transposi-
tion map.
If item (ii) holds only for a fixed n 2 N,
the map T is called n-positive. This is obviously
a weaker condition than complete positivity.
However, n-positivity implies m-positivity for
all m n,andforA= B(C
d
) complete positivity
is implied by n-positivity, provided n d holds.
Let us consider now the question whether a
channel should be unital or not. We have already
mentioned that T(1) 1 must hold since effects
should be mapped to effects. If T(1) is not equal to 1,
we get (T1) = T
(1)< 1 for the probability to
measure the effect 1 on systems in the state T
,
but this is impossible for channels which produce an
output with certainty, because 1 is the effect which
is always true. In other words, if a CP map is not
unital, it describes a channel which sometimes
produces no output at all and T(1) is the effect
which measures whether we have got an output. We
will assume henceforth that channels are unital if
nothing else is explicitly stated.
Quantum Channels
In this section we will discuss some basic properties
of CP maps which transform quantum systems into
quantum systems, in particular the Stinespring
theorem, which constitutes the most important
structural result. For a more detailed presentation,
including generalizations to more general input/
Channels in Quantum Information Theory 473

output algebras the reader should consult the
textbook by Paulsen (2002).
The Stinespring Theorem
Hence consider channels between quantum systems,
i.e., A= B(H
1
) and B= B(H
2
). A fairly simple
example (not necessarily unital) is given in terms of
an operator V : H
1
!H
2
by B(H
1
) 3 A 7!VAV
2
B(H
2
). A second example is the restriction to a
subsystem, which is given in the Heisenberg picture
by B(H) 3 A 7!A 1
K
2B(HK). Finally the com-
position S T = ST of two channels is again a
channel. The following theorem says that each
channel can be represented as a composition of
these two examples [7].
Theorem 2 (Stinespring dilation theorem). Every
completely positive map T : B(H
1
) !B(H
2
) has the
form
TðAÞ¼V
ðA 1
K
ÞV ½1
with an additional Hilbert space K and an operator
V : H
2
!H
1
K. Both (i.e., K and V) can be
chosen such that the span of all (A 1)V with A 2
B(H
1
) and 2H
2
is dense in H
1
K. This
particular decomposition is unique (up to unitary
equivalence) and is called the minimal
decomposition.
By introducing a family j
j
ih
j
j of one-dimen-
sional projectors with
P
j
j
j
ih
j
j= 1, we can define
the ‘‘Kraus operators’’ h , V
j
i= h
j
, Vi.
In terms of these, we can rewrite eqn [1] in
the following form (Kraus 1983):
Corollary 3 (Kraus form). Every CP map
T : B(H
1
) !B(H
2
) can be written in the form
TðAÞ¼
X
N
j¼1
V
j
AV
j
½2
with operators V
j
: H
2
!H
1
.
To get a third representation of channels, consider
the Stinespring form [1] of T and a vector 2K
such that U( ) = V() can be extended to a
unitary map U : HK!HK. It is then easy to
see that the dual T
of T can be written as:
Corollary 4 (Ancilla form). Assume that T : B(H) !
B(H) is a channel. Then there is a Hilbert space K, a
pure state
0
, and a unitary map U : HK!HK
such that
T
ðÞ¼tr
K
Uð
0
ÞU
ðÞ½3
holds.
This representation of a channel has a (seemingly)
very nice physical interpretation, because we can
look at eqn [3] as the unitary interaction of the
system with an unobservable environment, which is
initially in the state
0
. The problem, however, is
that there is a great arbitrariness in the choice of U
and
0
. This is the weakness of the ancilla form
compared to the Stinespring representation.
Finally, let us state a related result. It characterizes
all decompositions of a given completely positive
map into completely positive summands. By analogy
with results for states on abelian algebras (i.e.,
probability measures), we will call it a Radon–
Nikodym theorem (see Arveson (1969) for a proof).
Theorem 5 (Radon–Nikodym theorem). Let
T
x
: B(H
1
) !B(H
2
), x 2 X be a family of CP
maps and let V : H
2
!H
1
K be the Stinespring
operator of
T =
P
x
T
x
; then there are uniquely
determined positive operators F
x
in B(K) with
P
x
F
x
= 1 and
T
x
ðAÞ¼V
ðA F
x
ÞV ½4
The Jamiołkowski Isomorphism
The subject of this section is a relation between CP
maps and states of bipartite systems, first discovered
by Jamiołkowski (1972), and which is very useful in
translating properties of bipartite systems into
properties of positive maps and vice versa.
The idea is based on the following setup. Alice
and Bob share a bipartite system in a maximally
entangled state
¼
1
ffiffiffi
d
p
X
d
¼1
e
e
2HH ½5
(where e
1
, ..., e
d
denote an orthonormal basis of H).
Alice applies to her subsystem a channel T : B(H) !
B(H
0
) while Bob does nothing. At the end of the
processing, the overall system ends up in a state
R
T
¼ðT IdÞjihj½6
Mathematically, eqn [6] makes sense if T is only
linear but not necessarily positive or CP (but then
R
T
is not positive either). If we denote the space of
all linear maps from B(H) into B(H
0
)byL, we get a
map
L3T 7!R
T
2BðKHÞ ½7
which is easily shown to be linear (i.e.,
R
TþS
= R
T
þ R
S
for all , 2 C and all
T, S 2L). Furthermore, this map is bijective, hence
a linear isomorphism.
474 Channels in Quantum Information Theory