Kelly J.J. Graduate Mathematical Physics, With MATHEMATICA Supplements
Подождите немного. Документ загружается.

116 4 Generalized Functions
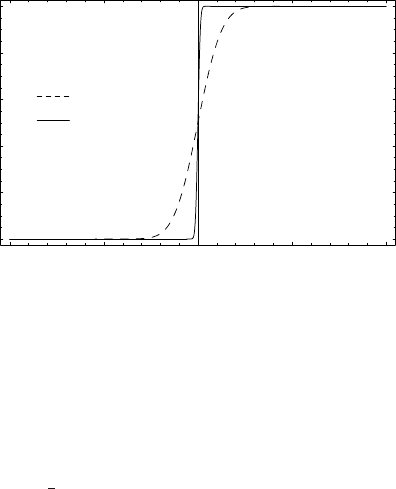
1 0.5 0 0.5 1
x
0
0.2
0.4
0.6
0.8
1
4 #x,V '
V 0.01
V 0.1
Figure 4.2. Nascent step functions.
because ∆x is even, we obtain <0, Σ 1/2. Therefore, the Heaviside step function
assumes the values
<x
L
M
M
M
M
M
N
M
M
M
M
M
O
0 x<0
1
2
x 0
1 x>0
(4.33)
Notice that <x is an ordinary function despite the discontinuity at x 0. There are other
versions of the step function defining the value at x 0tobeeither0or1,but<x is
the version that arises naturally in calculations that employ the Dirac delta function. Also
notice that once the limit Σ!0 is taken <x becomes independent of the representation
of ∆x, Σ, depending only upon the fact that the delta function is defined with unit area
and the properties ∆x 00 and ∆x∆x.
Despite the discontinuity of <x at x 0, its definition in terms of integration over a
delta function can be used to deduce an operational definition for the derivative of <x,
namely
<x
x
∆yy <
'
x∆x (4.34)
where the derivative of the unit discontinuity becomes a spike of unit area. This result is
consistent with the behavior of the underlying nascent functions
<x, Σ
x
∆y, Σy <
'
x, Σ ∆x, Σ (4.35)
4.3.2 Derivatives of the Dirac Delta Function
Can one interpret the derivative of a delta function, ∆
'
x? Once again we appeal to the
Gaussian representation of a nascent delta function to evaluate
4.3 Other Useful Generalized Functions 117
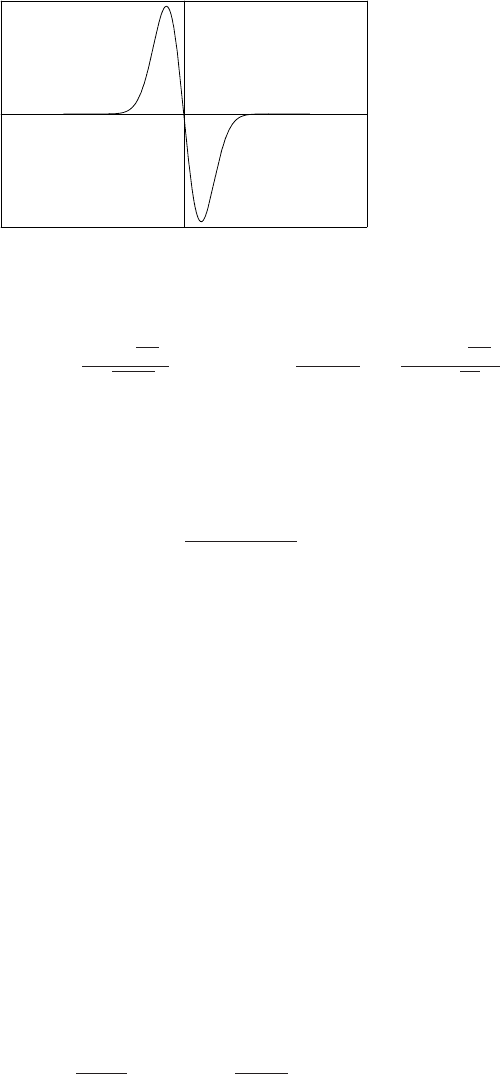
x
G
#x,V '
Figure 4.3. Derivative of nascent delta function.
∆x, Σ
Exp
x
2
2Σ
2
2ΠΣ
2
∆
'
x, Σ
(∆x, Σ
(x
x Exp
x
2
2Σ
2
Σ
3
2Π
(4.36)
Figure 4.3 demonstrates that this function has two equal and opposite lobes centered near
x *Σwith area proportional to Σ
1
.AsΣ decreases, these lobes become taller and
closer together. Thus, one expects integration of ∆
'
x, Σ against a continuous function to
produce a result of the form
f x∆
'
x, Σx -
f Σ f Σ
Σ
-f
'
0 (4.37)
wherein the ratio between the difference of the function on opposite sides of x 0 and
the width of the interval is proportional to the derivative of f x and of opposite sign.
Although ∆
'
x, Σ obviously does not yield an ordinary function in the limit Σ!0, its
behavior under an integral serves as the operational definition of a generalized function.
Assuming that f x is differentiable near x 0, integration by parts yields
f x∆
'
x, Σx f x∆x, Σ
f
'
x∆x, Σx (4.38)
The surface terms vanish for any reasonably well-behaved f x, while the remaining inte-
gral reduces to f
'
0 in the limit Σ!0, such that
f x∆
'
xx lim
Σ!0
f x∆
'
x, Σx
f
'
x∆xx f
'
0 (4.39)
It is now straightforward to generalize this procedure to obtain an interpretation
f x∆
n
xx
n
f
n
0 (4.40)
of arbitrary derivatives, assuming that fx is differentiable at least n times at x 0. Note
that we use the notation
∆
n
x
n
∆x
x
n
,f
n
x
n
f x
x
n
(4.41)
118 4 Generalized Functions
4.4 Green Functions
Suppose that a damped harmonic oscillator is subjected to an external force Ft with
finite duration and is at rest before the onset of that force. The displacement satisfies a
differential equation of the form
m¨xt2mΓ˙xtmΩ
2
0
xtFt (4.42)
where Ω
0
is the natural frequency of undamped oscillations, Γ is the damping constant,
and time derivatives are indicated by the dot notation. The homogeneous equation has
solutions of the form
m¨xt2mΓ˙xtmΩ
2
0
xt0 xtExpΓtA SinΩtB CosΩt (4.43)
where A and B are constants and where we assume weak damping to obtain
Γ < Ω
0
Ω
Ω
2
0
Γ
2
(4.44)
Now suppose that the mass is struck at time t
'
such that there is an abrupt change in
velocity. We assume that the impulse acts during an infinitesimal time interval that is too
short for the position of the mass to change. Thus, the dissipative and restoring forces have
no effect and we find that the instantaneous change in velocity
Ft!∆t t
'
$˙xt
'
m
lim
!0
˙xt
'
˙xt
'
(4.45)
reduces to simply /m, where is the impulse delivered. Recognizing that the homoge-
neous equation applies both before and after the impulse, solutions for those intervals take
the form
t<t
'
xtExpΓtA
SinΩtB
CosΩt (4.46)
t>t
'
xtExpΓtA
SinΩtB
CosΩt (4.47)
where the coefficients are chosen to satisfy the boundary conditions
xt
'
˙xt
'
0 A
B
0 (4.48)
xt
'
0, ˙xt
'
m
A
mΩ
Γt
'
CosΩt
'
,B
mΩ
Γt
'
SinΩt
'
(4.49)
such that the Green function
Gt,t
'
ExpΓt t
'
mΩ
SinΩt t
'
<t t
'
(4.50)
represents the response of the system at time t to a unit impulse at time t
'
. This response
takes the form of a damped sinusoidal oscillation. The step function enforces causality –
there can be no effect before its cause. Also, notice that Gt,t
'
Gt t
'
depends only
upon the difference between the times because the homogeneous equation has no explicit

4.4 Green Functions 119
time dependence and thus is insensitive to clock offsets. We could have simplified the
algebra (omitted anyway) by exploiting this symmetry from the beginning. The response
of the system to a disturbance of finite duration can be evaluated by using the superposition
principle for linear differential equations to sum the effects of a sequence of impulses that
represents the time profile according to
Ft
Ft
'
∆t t
'
t
'
xtx
0
t
Gt,t
'
Ft
'
t
'
(4.51)
where x
0
t is a solution to the homogeneous equation
¨x
0
t2Γ˙x
0
tΩ
2
0
x
0
t0 (4.52)
Often the boundary conditions x ˙x 0 specifying that the system is at
rest before the action of an external disturbance require x
0
t0; if not, x
0
t is designed
to match the appropriate boundary conditions. To demonstrate this solution formally, let
m
2
t
2
2mΓ
t
mΩ
2
0
(4.53)
represent a linear differential operator such that the equation of motion becomes
xtFt (4.54)
The homogeneous solution satisfies
x
0
t0 (4.55)
while the Green function satisfies
Gt,t
'
∆t t
'
(4.56)
where the operator applies to the first argument of Gt,t
'
with the second held fixed.
Applying to the proposed solution,
xtx
0
t
Gt,t
'
Ft
'
t
'
xt
Gt,t
'
Ft
'
t
'
∆t t
'
Ft
'
t
'
Ft
(4.57)
one recovers the original differential equation. Therefore, the function
xtx
0
t
Gt,t
'
Ft
'
t
'
(4.58)
with
Gt,t
'
ExpΓt t
'
mΩ
SinΩt t
'
<t t
'
(4.59)
provides a solution to the inhomogeneous problem in the form of a convolution integral
in which the displacement at time t is determined by the net response of the system to
120 4 Generalized Functions
external forces at all earlier times. The influence of a force at time t
'
upon a later time t
is reduced by the exponential damping factor, such that recent forces tend to matter most.
Notice that causality is enforced by the step function in Gt,t
'
and that we may limit the
range of integration strictly to the past, such that
xtx
0
t
t
Gt,t
'
Ft
'
t
'
(4.60)
should be interpreted as the sum of effects produced by past causes for all past times up
to the present. Nevertheless, one often extends the upper limit of integration to for
convenience, confident that the Green function eliminates sensitivity to the future.
Note that our derivation was more schematic than rigorous; for example, we implicitly
assumed uniform convergence in order to move inside the convolution integral. Never-
theless, it is consistent with the spirit of generalized functions and can be made rigorous
by replacing the delta and step functions with the appropriate nascent functions and evalu-
ating the limits more carefully. Although the Gt,t
'
obtained here is actually an ordinary
function, it is described as a generalized function because the inhomogeneous term upon
which it is based is idealized as a delta function. It is also important to recognize that the
Green function depends not only upon but also upon the boundary conditions. The solu-
tion to
Gt,t
'
∆t t
'
(4.61)
is usually not unique without specification of the boundary conditions. The version we
derived above is often described as a retarded Green function because the effect follows
the cause (is retarded in time), and is denoted by G
t,t
'
.If describes a wave equation,
we might be interested in an advanced solution, G
, or a standing-wave solution, G
0
.
The present analysis is typical of the Green-function method for linear systems. In the
next several chapters we will develop a variety of useful techniques for construction of the
Green functions for a variety of systems. Often there will be several equivalent represen-
tations and the most useful representation may depend upon its anticipated application.
4.5 Multidimensional Delta Functions
A point mass at
r
'
x
'
,y
'
,z
'
is represented by a density distribution of the form
Ρx, y, zm∆
r
r
'
m∆x x
'
∆y y
'
∆z z
'
(4.62)
where in Cartesian coordinates the three-dimensional delta function factors into a product
of three one-dimensional delta functions of identical form such that
V
Ρx, y, z
3
r m
V
∆
r
r
'
3
r
m
∆x x
'
x
∆y y
'
y
∆z z
'
z
L
M
M
N
M
M
O
m
r
'
V
0
r
'
/ V
(4.63)
4.5 Multidimensional Delta Functions 121
returns the mass for any volume that contains the particle and vanishes otherwise. If nec-
essary, we can work with a spherically symmetric nascent delta function of the form
∆
r
r
'
lim
Σ!0
∆
r
r
'
, Σ lim
Σ!0
Exp
r
r
'
2
2Σ
2
2ΠΣ
2
3/ 2
(4.64)
that represents a compact charge distribution and is normalized according to
V
∆
r
r
'
, Σ
3
r
L
M
M
N
M
M
O
1
r
'
V
0
r
'
/ V
(4.65)
Notice that a three-dimensional delta function has dimensions of inverse volume. Of course,
many alternative nascent delta functions with these same basic properties are also avail-
able.
In curvilinear coordinate systems (spherical, cylindrical, etc.), one must include Jaco-
bian factors for each one-dimensional delta function, with respect to a particular coordi-
nate, that match the differential volume element. For example, in spherical coordinates
r, Θ, Φ we factor the three-dimensional delta function in the form
∆
r
r
'
∆r r
'
rr
'
∆Θ Θ
'
SinΘ
∆Φ Φ
'
∆r r
'
rr
'
∆
CosΘ CosΘ
'
∆Φ Φ
'
(4.66)
such that
∆
r
r
'
3
r
0
∆r r
'
rr
'
r
2
r
Π
0
∆Θ Θ
'
SinΘ
SinΘ Θ
2Π
0
∆Φ Φ
'
Φ
0
∆r r
'
rr
'
r
2
r
1
1
∆
CosΘ CosΘ
'
CosΘ
2Π
0
∆Φ Φ
'
Φ
1
(4.67)
where for the polar angle it is often more convenient to employ ΖCosΘ instead of Θ
directly. Also note for the radial delta function we chose to express the denominator in the
symmetric form rr
'
instead of either r
2
or r
'2
, but all three forms are equivalent because the
delta function carries the instruction r ! r
'
. Similarly, in cylindrical coordinates Ξ, Φ,z
we find
V ΞΞΦz ∆
r
r
'
∆Ξ Ξ
'
Ξ
∆Φ Φ
'
∆z z
'
(4.68)
Suppose that charge q is distributed uniformly on a disk of radius a in the equatorial
plane. The charge density can then be represented by
Ρx, y, z
3q
2Πa
3
<a r∆
CosΘ
3q
2Πa
3
<a r∆
Θ
Π
2
q
Πa
2
<a Ξ∆z
(4.69)
where the first two forms employ variations of spherical coordinates and the last employs
cylindrical coordinates. The step function, constructed as an integral over a delta function,

122 4 Generalized Functions
is dimensionless. The coefficients must be chosen to ensure proper normalization of the
total charge for each representation of the differential volume element. Again, physically
realizable distributions could employ nascent delta and step functions but idealized func-
tions can be used if we are not interested in details that depend upon the precise sharpness
of the edges or the width of the disk.
Problems for Chapter 4
1. nascent delta functions
Sketch the following functions for small positive Σ and demonstrate that they can serve as
nascent delta functions.
a) ∆x, Σ
L
M
M
N
M
M
O
0 x > Σ
1
2Σ
x < Σ
b) ∆x, Σ
Σ
Π
1
Σ
2
x
2
c) ∆x, Σ
1
Π
Sinx/Σ
x
d) ∆x, Σ
Σ
Π
Sinx/Σ
x
2
Briefly discuss their advantages and disadvantages. Consider, for example, lim
Σ!0
∆x, Σ
for x 0 and also the behavior of
lim
Σ!0
f x∆x, Σ x (4.70)
when f x diverges at . Contrast, where appropriate, with the behavior of the Gaussian
representation.
2. Fermi distribution as nascent step function
The Fermi distribution
n, Τ
/ Τ
1
1
(4.71)
represents the occupation probability for a fermion state with energy relative to the Fermi
level at temperature Τ (in energy units). Show that as Τ!0 this function is closely related
to a nascent step function and deduce the corresponding nascent delta function.
3. higher derivatives of the delta function
Sketch ∆
''
x, Σ and ∆
'''
x, Σ. Discuss these curves in terms of the finite-difference formu-
las for f
''
x and f
'''
x.
4. derivative of delta function with monomial factor
Use induction to demonstrate that
x
m
∆
n
x
L
M
M
N
M
M
O
m
n!
nm!
∆
nm
x n 2 m 2 0
0 m>n2 0
(4.72)
in the operational sense of a generalized function integrated against a suitable function f x.
What conditions must be imposed upon f x?

Problems for Chapter 4 123
5. recoil factor for knockout reactions
Suppose that projectile a is scattered by nucleus A producing a final state containing the
scattered particle b, a knocked out particle c, and residual nucleus B such that aA B b
cB.Let
i
,
p
i
represent the energy and momentum of a particle labeled i a, b, c, A, B
with mass m
i
and use relativistic kinematics throughout. If B is left in a discrete state of
mass m
B
, the reaction calculation often involves a recoil factor
∆
b
c
B
a
m
A
c
(4.73)
defined by an integral over a delta function that enforces energy conservation, where we
have assumed that the target is at rest such that
A
m
A
and where
2
B
p
2
B
m
2
B
p
a
p
b
p
c
2
m
2
B
with
p
2
c
2
c
m
2
c
(4.74)
according to momentum conservation. (Note that we use natural units with the light speed
set to unity.) Find an explicit expression for in terms of the energies and momenta of c
and B. (Hint: the kinematics of particles a and b and the direction of
p
c
are fixed while
B
and
p
c
depend upon
c
.)
6. Green function for stretched string
Suppose that a string clamped at x 0 and x L is under tension T and is subjected to a
static load Fx. The displacement yx satisfies
Ty
''
xFx (4.75)
for sufficiently small F/T. Note that F is the force per unit length. Evaluate the Green
function, Gx, x
'
, which satisfies
T
(
2
(x
2
Gx, x
'
∆x x
'
(4.76)
and express the general solution for an arbitrary load distribution in terms of the Green
function.
7. Green function for damped oscillator
A damped harmonic oscillator satisfies a differential equation of the form
m¨xt2mΓ˙xtmΩ
2
0
xtFt (4.77)
where m is the mass, Γ is the damping parameter, Ω
0
is the frequency of free undamped
oscillations, and F is an additional external force. Evaluate and graphically compare the
retarded Green functions for underdamped Γ < Ω
0
, critically damped Γ Ω
0
, and
overdamped Γ > Ω
0
systems.
8. response of damped oscillator to step using Green function
a) Use the Green function for a damped oscillator to solve
¨xt2Γ˙xtΩ
2
0
xt f
0
<t (4.78)
for a step function. Find explicit solutions for the underdamped, overdamped, and
critically damped cases. Compare these three solutions graphically and explain their
behavior.
124 4 Generalized Functions
b) Combine two of these solutions to determine the response to a square pulse
¨xt2Γ˙xtΩ
2
0
xt f
0
<t<t Τ (4.79)
Plot the solutions for Γ/ Ω
0
0.5, 1.0, 2.0 with Τ10/Ω
0
as functions of Ω
0
t and
explain their general characteristics. If this were an RLC circuit, under what condi-
tions would the output follow the input most closely?
5 Integral Transforms
Abstract. Integral transforms find widespread application in the solution of differen-
tial equations and the construction of Green functions that describe the response of
linear systems to external influences. We illustrate these methods using the Fourier
and Laplace transforms, but the technique is more general. Several practical exam-
ples of the use of Fast Fourier transforms are also included.
5.1 Introduction
The function
˜
f z defined by
˜
f z
b
a
tKz, t f t (5.1)
is described as an integral transform of f t with respect to the kernel Kz,t. The range of
integration must also be specified in the definition of the transform. The variables t and z
are then described as conjugate to each other. It is useful to represent the integral trans-
formation by a linear operator acting on the function f to produce a new function
˜
f
according to
˜
f f
˜
f z
b
a
tKz, t f t (5.2)
where the functional relationship on the left-hand side is uncluttered by variable names.
When it is useful to indicate symbols for the pair of conjugate variables, we can write
˜
f zf z f tz or
˜
f f t (5.3)
depending upon which variable is of interest. If the integral transforms for two func-
tions f and g both exist, the transform of a linear combination
h af bg
˜
h a
˜
f b˜g (5.4)
is the same linear combination of their transforms because is linear. Similarly, the
inverse transformation can be represented by
f
1
˜
f f t
C
zK
1
t,z
˜
f z (5.5)
where K
1
represents the inversion kernel (not the reciprocal of K!) and C is an appropriate
contour. Thus, the inversion is also represented by a linear operator
1
.
Graduate Mathematical Physics. James J. Kelly
Copyright © 2006 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim
ISBN: 3-527-40637-9