Kusse B.R., Westwig E.A. Mathematical Physics: Applied Mathematics for Scientists and Engineers
Подождите немного. Документ загружается.

556
ADVANCED TOPICS IN COMPLEX ANALYSIS
(b)
How
many
z-plane Riemann sheets are required to represent
this
function?
(c)
How
are
the Riemann sheets connected?
(d)
Draw several closed contours, which span multiple sheets
in
the z-plane.
5.
Locate the branch
points
and branch cuts in the g-plane and describe the connec-
tion of the Riemann sheets for the following functions:
i.
w
=
ln(2
-
1).
ii.
y
=
g
lnz.
iii.
y
=
(2
-
z)'/'.
iv.
w
=
z112
+
(z
-
1)'12.
6.
For each of the
following
functions:
(1)
Idenhfy the number
of
Riemann sheets
in the complex z-plane and the complex y-plane.
(2)
Locate
all
the branch points
and
position the branch cuts.
(3)
Show where the z-plane maps onto the w-plane
and vice versa.
(4)
Indicate how the Riemann sheets are connected:
i.w=z
1/4
.
ii.
w
=
213.
iii.
g
=
cosz.
v.
y
=
hl(2
+
1).
2
iv.
g
=
(lnz)
.
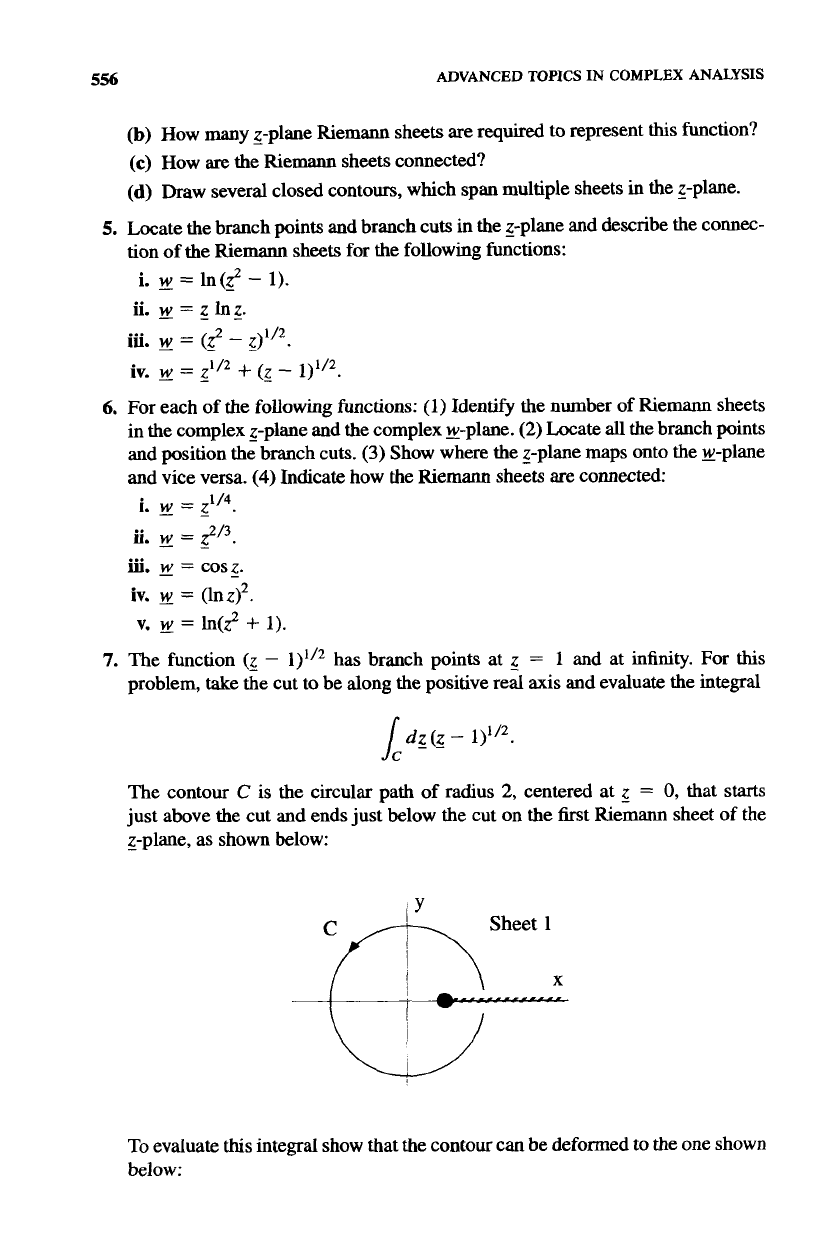
7.
The function
(z
-
1)'l2 has branch points at
2
=
1
and
at
infinity.
For
this
problem, take the cut to be along the positive real axis and evaluate the integral
The contour
C
is
the circular path of radius
2,
centered at
z
=
0,
that
starts
just above the cut and ends just below the cut on the first Riemann sheet
of
the
z-plane, as shown below:
CA
Sheet
1
f
!
\
X
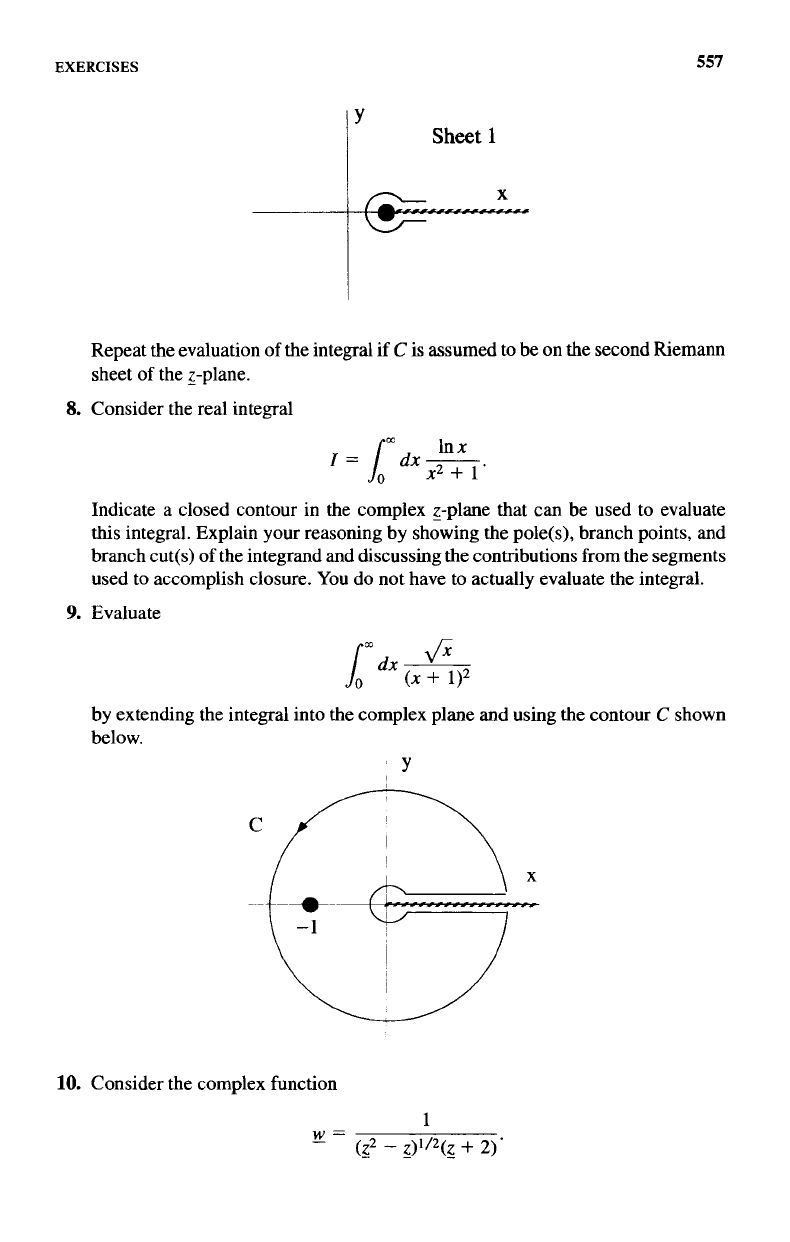
To
evaluate
this
integral show that the contour can be deformed to the one shown
below:
EXERCISES
557
Y
Sheet
1
Repeat the evaluation
of
the integral
if
C
is assumed
to
be on the second kemann
sheet
of
the z-plane.
8.
Consider the real integral
Indicate a closed contour in the complex z-plane that can be used to evaluate
this
integral. Explain your reasoning by showing the pole(s), branch points, and
branch cut(s)
of
the integrand and discussing the contributions
from
the segments
used to accomplish closure.
You
do not have to actually evaluate the integral.
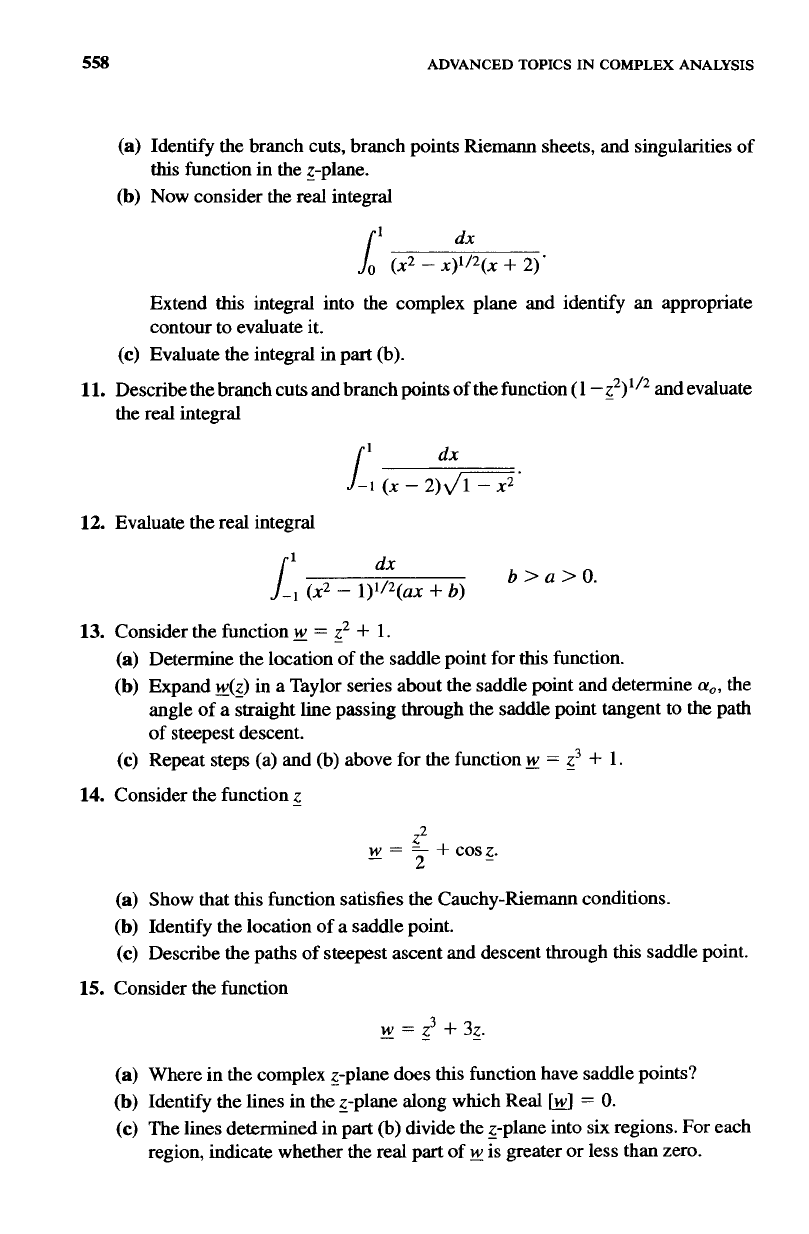
9.
Evaluate
by extending the integral into the complex plane and using the contour
C
shown
below.
Y
10.
Consider the complex function
558
ADVANCED TOPICS
IN
COMPLEX ANALYSIS
(a)
Identify the branch cuts, branch points Riemann sheets, and singularities of
this
function in the g-plane.
(b)
Now consider the real integral
dx
1
i
(x2
-
x)'/2(x
+
2)'
Extend
this
integral into the complex plane and identify an appropriate
contour to evaluate it.
(c)
Evaluate the integral in part (b).
the real integral
11.
Describe the branch cuts and branch
points
of
the function
(1
-g2)'/'
and evaluate
dx
12.
Evaluate the real integral
dx
b>a>O.
J'
-1
(x2
-
1)1/2(ax
+
b)
13.
Consider the function
=
g2
+
1.
(a)
Determine the location of
the
saddle point for
this
function.
(b)
Expand
I&.)
in a Taylor series about the saddle point and determine
ao,
the
angle of a straight
line
passing through the saddle point tangent to the path
of steepest descent.
(c)
Repeat steps (a) and (b) above for the function
w
=
g3
+
1.
14.
Consider the function
z
22
w
=
+cosg.
-2
(a)
Show that
this
function satisfies the Cauchy-Riemann conditions.
(b)
Identify the location of a saddle point.
(c)
Describe the paths of steepest ascent and descent through
this
saddle point.
15.
Consider the function
w
=
23
+
3g.
--
(a)
Where in the complex z-plane does this function have saddle points?
(b)
Identify the lines in the z-plane along which Real
M
=
0.
(c)
The
lines determined in part (b) divide the z-plane into six regions. For each
region, indicate whether the real part of
411
is greater or less than zero.
EXERCISES
559
(d)
Near each of the saddle points, determine the directions of the paths
of
(e)
Using the method of steepest descent, determine the approximate value of
steepest descent and steepest ascent through these saddle points.
the real integral
where
s
is a large, positive real number.
16.
Let
w
=
sing.
(a)
Where are the saddle points
of
this
function
in
the g-plane?
(b)
Identify the paths
of
steepest descent and ascent through these saddle points.
(c)
Make a plot of the lines of constant Real
W
in the complex plane and label
several of the contours to clearly show the topology.
Also
draw the lines of
steepest descent and ascent on this plot.
17.
Consider the function
w
=
sing
-
g.
(a)
Show that this function has saddle points at
z
=
2m
where
n
=
0,+1,
22,
...
.
(b)
Expand the function in a Taylor series about the saddle point at
z
=
0.
What
is
the second derivative of
w
at this point?
(c)
What is the value of the function at
=
O?
Use
this
value to divide the
?-plane into regions around
g
=
0,
where the real part of the function is
either larger than or smaller than its real part at
z
=
0.
(d)
Determine
all
the possible paths of steepest descent and steepest ascent that
pass through
g
=
0.
18.
Use the method
of
steepest descent to approximate the value
of
the integral
Z(x)
=
dtexr-"
for large, positive
x.
19.
Consider the real integral
la
dx xe-sxz,
where
s
is
a
real positive number.
(a)
Evaluate this integral exactly using the fact that the integrand is
an
exact
differential.
560
ADVANCED
TOPICS
IN COMPLEX
ANALYSIS
(b)
Now evaluate the integral by the method of steepest descent and compare
this
approximate answer to the exact expression obtained in part (a).
20.
Use the method of steepest descent to approximate the Laplace transform
of
and compare it to the exact transform. Now repeat the same process for the
transform
of
where
n
is any positive integer.
21.
Consider the integral
y+im
Z(x)
=
-
‘J
ds-,
where the path of integration
is
along a vertical line to the right of the origin in
the 5-plane.
(a)
Locate the branch
points
of the integrand in the s-plane.
(b)
Place the branch cut
so
that the path of integration will not cross
it.
(c)
Evaluate
Z(x)
for negative
x.
(d)
For large positive
x,
use the method
of
steepst descent to approximate
Z(x).
2m’
y-im
S
22.
According to transform tables, the inverse Laplace transform of
is
0
for
t
<
0,
and equals
1
-
sin
(2Jcrt)
d=
for
t
>
0.
Use the method of steepest descent to approximate
Contour plots for the constant real
part
of
WJSJ
help
to
see how to deform the
path of integration. When you deform the Laplace contour
C
remember to take
into account the branch cut, branch points, and the
singularity
of the integrand.
The
integrand has a slowly varying function of
8,
and both saddle points
of
EXERCISES
561
-
w(s)
should be used. How does your approximate answer compare to the correct
answer for large values of
t?
What would have happened if you had used only
one saddle point?
If
possible, use a computer to make a
3D
plot of the real part
of
_w(s).
23.
Use the method of steepest descent to find an approximation for the inverse
Laplace transform
of
Show the paths of steepest ascent and descent through the saddle point(s) and
discuss the deformation of the path
of
integration.
Also,
include comments on
any branch points
and
branch cuts in your solution. Compare your answer to the
exact value of the inversion, which is
Now repeat this process for the inversion of
TENSORS
IN
NON-ORTHOGONAL
COORDlNATE SYSTEMS
This
chapter continues
our
discussion of tensors.
It
begins with a brief review of tensor
transformation properties, which was covered in more detail
in
Chapter
4.
Then we
tackle the complications that arise
in
non-orthononnal coordinate systems. The ideas
of contravariance, covariance, and the metric tensor
are
developed to handle inner
products in non-orthonormal systems.
14.1
A
BREF
REVIEW
OF
TENSOR TRANSFORMATIONS
In
Chapter
4,
we discussed how a tensor is defined by its behavior under coordinate
transformations. With only a hint
of
sarcasm, the definition was given by the state-
ment,
“A
tensor is any quantity that transforms as a tensor.” What
this
means is that
transformation rules
are
enough to give tensors
all
of
their
special properties.
If
an
object transforms between coordinate systems using tensor transformation rules, you
can legitimately say the object is a tensor.
Remember, the elements of a tensor can be transformed using
a
transformation
matrix whose elements can
be
obtained from the equations relating the coordinates
of
the two systems under consideration, For transformations between Cartesian systems,
the elements of
this
transformation matrix
[a]
are given by
(14.1)
In
this equation, the original system
has
coordinates
xi
and basis vectors
@i.
The system
being transformed to, the primed system, has coordinates
xi‘
and basis vectors
6;.
For
orthonormal coordinate systems, the inverse
of
this
transformation matrix
is
always
562
A
BRIEF
REVIEW
OF
TENSOR
TRANSFORMATIONS
563
given by its transpose
a;’
=
aji.
(14.2)
An
arbitrary tensor of rank
n
can be expressed in either the unprimed or primed
coordinate system as
-
-
(14.3)
where there are
n
subscripts and
n
basis vectors in each term.
Tijk...
and
Tist.,,
are the
elements of the tensor in the unprimed and primed coordinate systems, respectively.
The two sets of elements are related to each other via the transformation matrix
equation
..I../../
T
=
T..
tjk
...
&.@.&
I
1
k.
. .
=
TAt..,erese,.
. .
,
T:sr...
=
Tijk
...aria
sjatk.
.
.
t
(14.4)
where the matrix
[a]
appears
n
times. The inverse transformation is
Tm
...
=
Ti>k
...a
irajsah
+
. . .
(14.5)
Our fundamental assertion is that any quantity that transforms in the manner described
by Equation
14.4
is by definition a tensor.
Because a vector is a first rank tensor, vector component transformations are also
described by Equations
14.4
and
14.5.
If
we write the vector in the two coordinate
systems as
=
V.&.
11
=
V’@’
r
r)
(14.6)
the relation between the components is given by
V,!
=
Via,.
(14.7)
and the inverse
v
r
=
V!a.
I
ir.
(14.8)
Scalars are invariant under a coordinate transformation. We can
think
of a scalar
as a zero rank tensor. The single element
of
a zero
rank
tensor has
no
subscripts and
is not combined with any basis vectors. Equation
14.4
reduces to
s
=
s’
(14.9)
where
S
(or
S’)
is
the single element of the scalar.
Example
14.1
As
an
example
of
using transform properties
to
identify
an
object as
a tensor, consider the Kronecker-6. Recall that
this
symbol
was
introduced to form dot
products in orthonormal coordinate systems. The dot product between two vectors,
a
and
B,
written in two different orthonormal coordinate systems, one unprimed and
564
TENSORS IN NON-ORTHOGONAL
COORDINATE
SYSTEMS
one primed, can
be
written
;C
.
B
=
A.B
1
I
.6..
1J
=
~'~'81
r
s
rs'
(14.10)
Now we already know that
Si,
and
a,!,
can both be expressed
as
unit
matrices, that
is as
111.
For the purposes of
this
discussion, however, let's look at the consequences
of just requiring that both expressions for the inner product in Equation 14.10 be
equal, and that
Ai
and
Bi
are vector components, and therefore transform according
to Equation 14.7. Substituting into Equation 14.10 for
A:
and
Bj
gives
A.B.6..
=
a
.A.a
.B.6/
I
I
IJ
n
1
SI
J
rs-
=
A.B.a
1
J
n
.a
SJ
.St
rs'
(14.1 1)
Because
this
expression must
be
true for any
and
B,
we can write
6..
11
=
a
n
.a
SJ
.a'
rs.
(14.12)
Inverting
this
expression gives
6/j
=
airajsars.
(14.13)
comparing Equations 14.12 and 14.13 with Equations 14.4 and 14.5, it can be seen
that the elements of the Kronecker-8 transform like the elements of a second-rank
tensor. Therefore, the Kronecker-8 symbol
is
a second-rank tensor, which can be
expressed with basis vectors as
-
-
6
=
8.
IJ'J
.&C.
=
a!.@!&!.
1111
(14.14)
14.2
NON-ORTHONORMAL COORDINATE SYSTEMS
Up
to
this
point, we have dealt only
with
orthonormal coordinate systems. In
Cartesian
systems, the basis vectors
Ci
are independent of position and orthonormal,
SO
Ci
.
Cj
=
&,.
In
curvilinear systems, the basis vectors
qi
are
no longer independent of
position, but they are still orthonormal,
so
qi
*
q,
=
6,.
Now we will consider non-
orthonormal systems.
To
distinguish these systems, we will label the basis vectors
of non-orthonormal coordinate systems
as
&,
and the non-orthonormality condition
becomes
gi
.
gj
f
6ij.
To
keep the discussion and derivations
as
simple as possible
in
this chapter, we will limit ourselves to coordinate systems which have basis vectors
that do not
vary
with position.
This
is obviously not the most general type of non-
orthonormal coordinate system, but
it
is enough to demonstrate the important ideas
of contravariance, covariance, and the metric tensor. In Appendix
F,
we present some
of the generalizations required to describe non-orthonormal systems with position-
dependent basis vectors.
In physics, non-orthonormal coordinate systems appear, for example,
in
both
special and general relativity. The basic postulate of special relativity is that the
speed
of light
c,,
is
the same in all inertial reference frames.
As
a consequence of
NON-ORTHONORMAL
COORDINATE
SYSTEMS
565
,’
ct’
i
ct
/
I
/
An
“event”
/
/
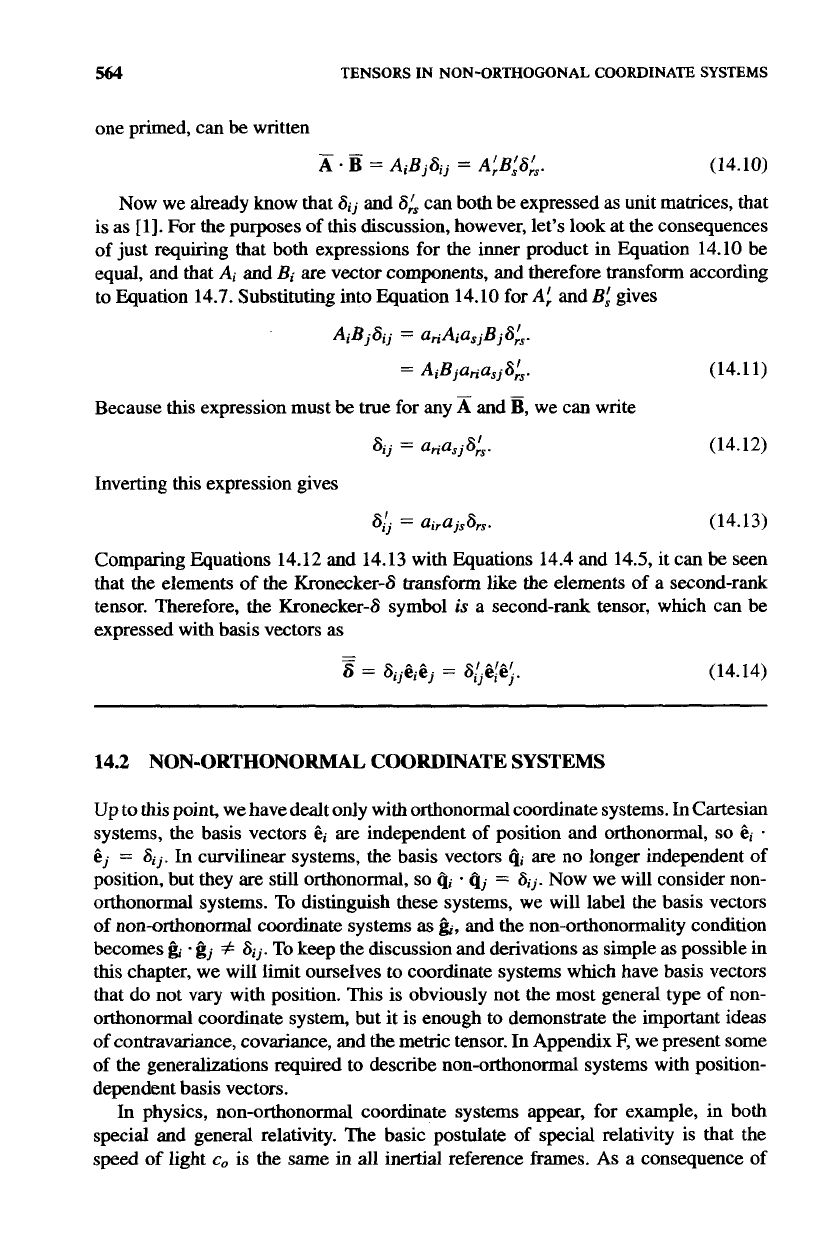
Figure
14.1
The Coordinate Systems
of
Special Relativity
this
postulate, both the position and time coordinates of some physical phenomenon
(an “event”) change as you change reference frames.
This
is very similar to how the
components of a vector change as you transform
the
coordinate axes
used
to describe
them.
If
we restrain the motion to
be
along a single spatial direction, an event can be
described by two coordinates, a single position coordinate and time.
As
will
be
shown,
the observation
of
an event in two different coordinate systems, one primed and one
unprimed, can be plotted as a single point using the combined set of axes as shown in
Figure 14.1. By taking its components with respect to both coordinate axes, we can
get
all
the relationships imposed by special relativity. Notice how the
x
and
ct
axes
intersect at right angles, but the
x‘
and
ct’
axes do not. While the unprimed system
appears to be orthogonal, the primed system looks like a non-orthogonal, skewed
system. We will discuss
this
picture, and its interpretation for special relativity, in
some detail in the sections that follow.
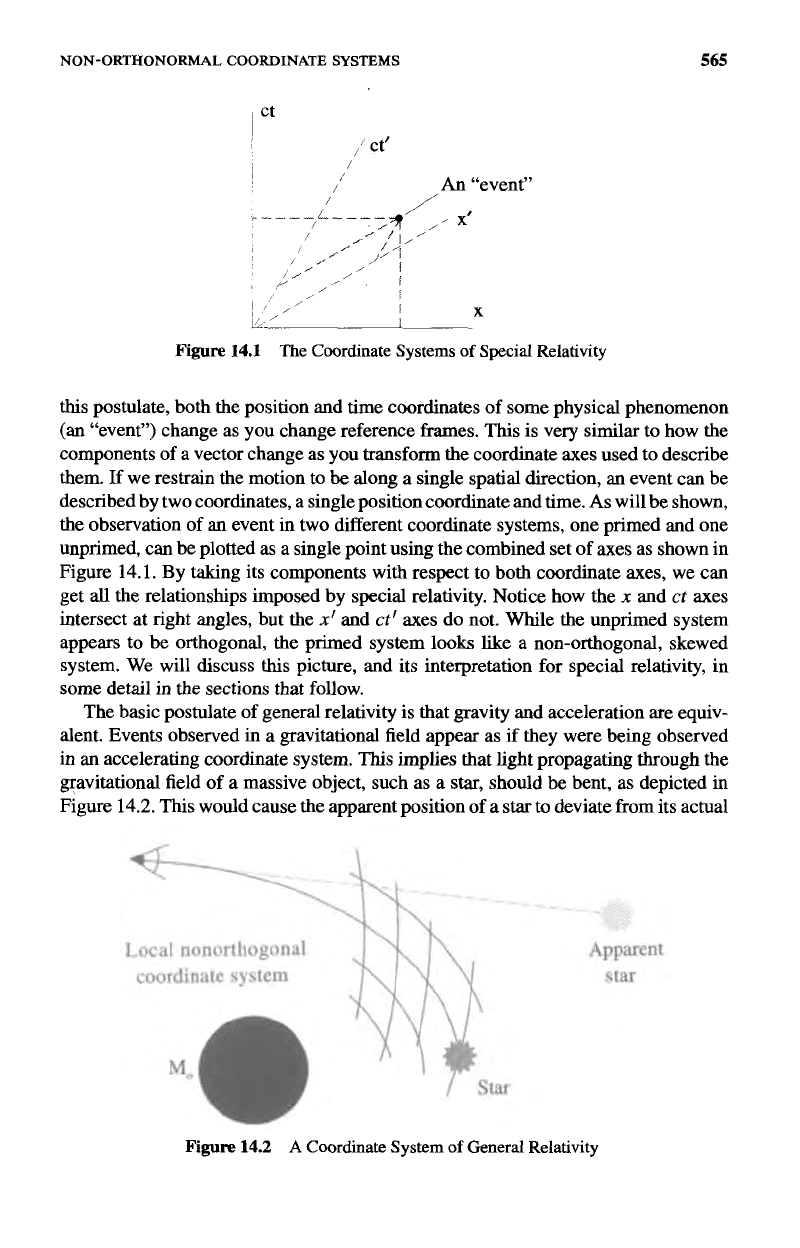
The basic postulate of general relativity is that gravity and acceleration are equiv-
alent. Events observed
in
a gravitational field appear as if they were being observed
in an accelerating coordinate system.
This
implies that light propagating through the
gfavitational field of a massive object, such as a
star,
should be bent,
as
depicted in
Figure 14.2. This would cause the apparent position of a
star
to deviate from its actual
~
--_
Local nonorthogonal Apparent
coordinate system star
Figure
14.2
A
Coordinate System
of
General Relativity