Kusse B.R., Westwig E.A. Mathematical Physics: Applied Mathematics for Scientists and Engineers
Подождите немного. Документ загружается.

576
TENSORS
IN NON-ORTHOGONAL
COORDINATE
SYSTEMS
14.2.5
Covariant
Vector
Component
lkansformations
Return to the pair of skewed coordinate systems described in Figure 14.4. The
covariant vector components of the vector
V
will transform according to some linear
relation
v;
=
[?]Vj.
(14.65)
To
determine
[?I
in
this
expression, consider two equivalent forms of the inner product
of two vectors, one in the primed system and one in the
unprimed
system:
-
A.
B
=
A'
Bi
=
A'J
B!.
I
(14.66)
The contravariant components of
&
transform according to the rules determined
earlier:
A'j
=
t{A'.
(14.67)
Substituting
this
expression into the far
RHS
of Equation 14.66 gives
A'
Bi
=
A'
t'.
11
B!.
(14.68)
Since
this
equation must be true for any
K,
we must have
Bi
=
t''
BI.
(14.69)
This expression is easily inverted to give
B;
=
gJi
B,.
(14.70)
Notice the similarity between Equations 14.60, 14.69, and 14.70.
This
supports
our
conclusion that the axis-parallel basis vectors are covariant.
We were able
to
combine the contravariant components
of
a vector with the
covariant basis vectors to fonn the vector itself:
v
=
V'g'.
(14.71)
It
would be nice to come up with a new set of contravariant basis vectors,
g,
which
could be combined with the covariant vector component to form the same vector.
That is,
-
v
=
vj
g.
(14.72)
In
fact, we can use
this
expression to define these contravariant basis vectors,
and
look at the consequences.
The basic properties of the contravariant basis vectors can be deduced by
again
considering the inner product between two vectors,
x
and
B.
If
x
is expressed using
covariant basis vectors and contravariant components, while
B
is written with con-
NON-ORTHONORMAL COORDINATE SYSTEMS
577
travariant basis vectors and covariant vector components, the inner product becomes
A.
B
=
A'
gi
.
B~
gj
-
A'
B.
&_.
gj.
-
I
g1
According to Equation 14.51, this expression must be equal to
A'
Bi
and
so
1
i=j
0
i#j
'
(14.73)
(14.74)
or
in terms of the Kronecker symbol,
1
(14.75)
g.
.
gj
=
6.j.
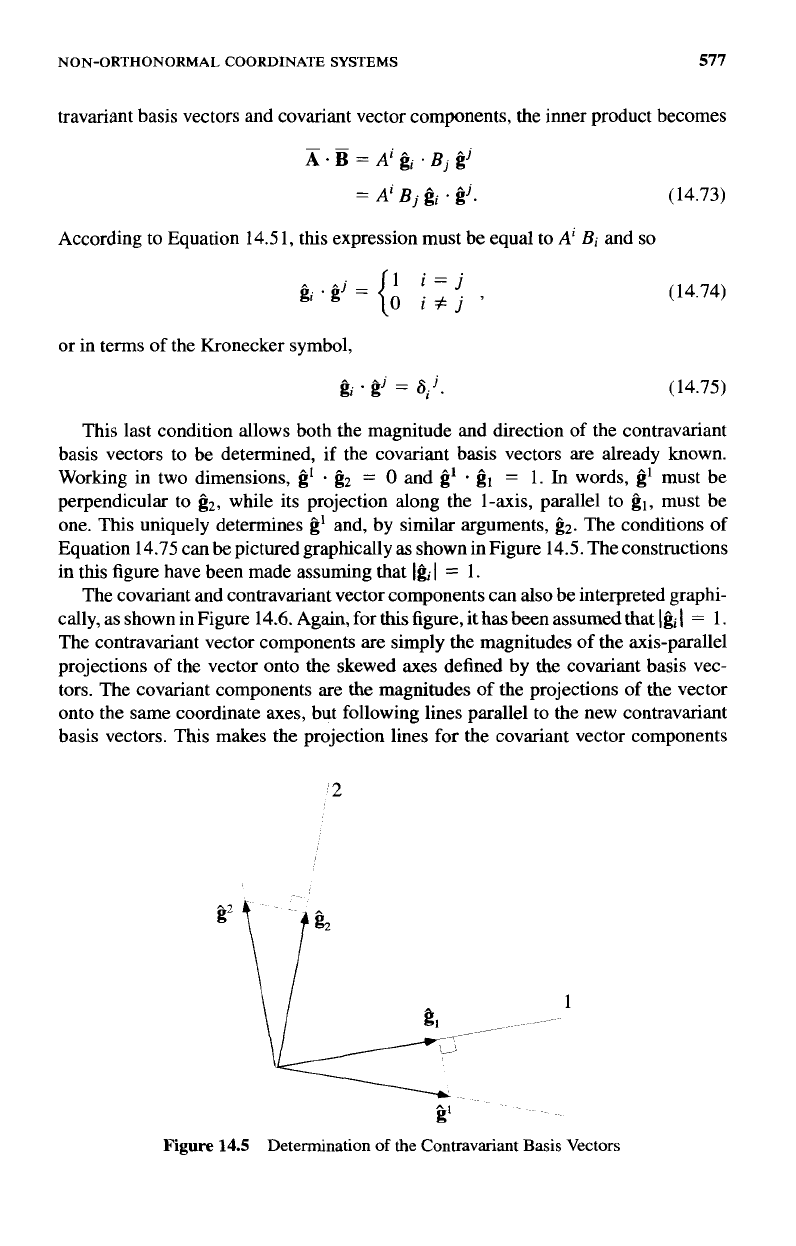
This last condition allows both the magnitude and direction of the contravariant
basis vectors to be determined, if the covariant basis vectors
are
already known.
Working in
two
dimensions,
g'
g2
=
0
and
g1
-
g1
=
1.
In
words,
g1
must be
perpendicular
to
g2,
while its projection along the 1-axis, parallel to
81,
must be
one. This uniquely determines
g1
and, by similar arguments,
g2.
The conditions
of
Equation 14.75 can
be
pictured graphically
as
shown in Figure 14.5. The constructions
in this figure have been made assuming that
I&
I
=
1.
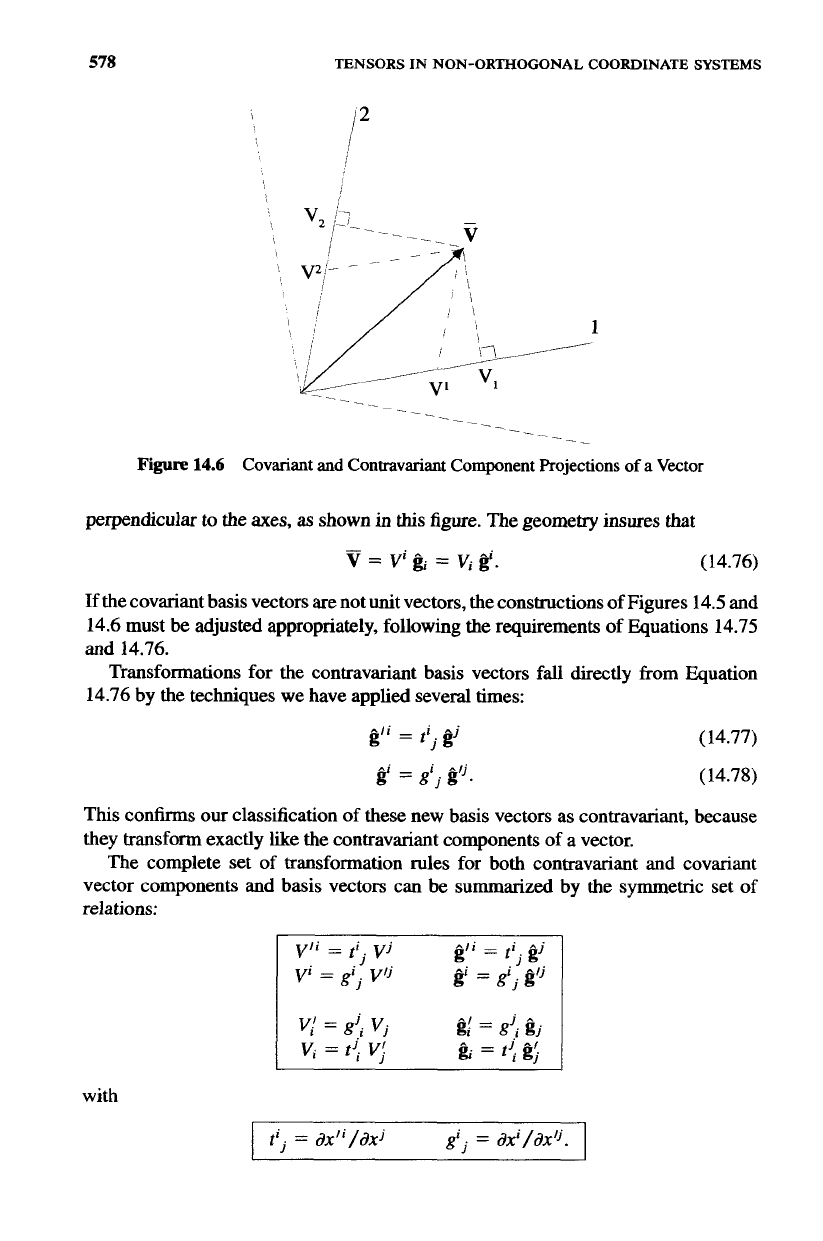
The covariant and contravariant vector components can also be interpreted graphi-
cally, as shown in Figure 14.6. Again, for
this
figure,
it
has
been assumedthat
(gi
I
=
1.
The contravariant vector components are simply the magnitudes of the axis-parallel
projections
of
the vector onto the skewed axes defined by the covariant basis vec-
tors. The covariant components are the magnitudes of the projections of the vector
onto the same coordinate axes, but following lines parallel to the new contravariant
basis vectors. This makes the projection lines for the covariant vector components
2
1
Figure
14.5
Determination
of
the Contravariant
Basis
Vectors
578
TENSORS IN
NON-ORTHOGONAL
COORDINATE
SYSTEMS
1
/---
-_
-
-
-
Figure
14.6
Covariant
and
Contrav~ant
Component
Projections
of
a
Vector
perpendicular
to
the axes,
as
shown
in
this
figure. The geometry insures that
-
v
=
v'
gi
=
vi
g.
(14.76)
If
the covariant basis vectors are not unit vectors, the constructions of Figures 14.5 and
14.6 must be adjusted appropriately, following the requirements of Equations 14.75
and 14.76.
Transformations for the contravariant basis vectors
fall
directly from Equation
14.76
by
the techniques we have applied several times:
g/i
=
tij
gj
(14.77)
g.
=
gij
gV.
(14.78)
This
confirms
our
classification of these new basis vectors as contravariant, because
they transform exactly like the contravariant components of a vector.
The
complete set of transformation rules for both contravariant
and
covariant
vector components and basis vectors can
be
summarized by the symmetric set of
relations:
with
NON-ORTHONORMAL COORDINATE SYSTEMS
579
Notice that contravariant quantities
are
always transformed by a summation over the
second index
of
either
tij
or
gjj,
while covariant quantities transform by summing
over the first index. For contravariant quantities,
tij
is used to
go
from the unprimed
to the primed system, while
g'
is used to
go
from the primed to the unprimed system.
For covariant quantities, the roles of
tij
and
g'
are reversed.
The new contravariant basis vectors allow us to construct another version
of
the
metric,
this
time with superscripts:
Mii
=
@
.
gj.
(14.79)
Application
of
this
form
of
the metric converts covariant quantities into contravariant
quantities. For example,
v'
=
Mi'
vj.
(14.80)
We will see in the next section that the two different metrics,
Mi,
and
Mi',
are simply
different representations of the same object, the metric tensor.
14.2.6
Covariance and Contravariance in Tensors
The covariant and contravariant properties discussed above are easily extended to
tensors. Just as a vector can be expressed with contravariant or covariant components,
a tensor can be expressed using purely contravariant or covariant components:
(14.82)
However, higher-rank tensors are more flexible than vectors because they can also
be expressed in a mixed form, with both contravariant and covariant indices. For
example,
-
is another equivalent representation
of
T.
All the tensor expressions in Equations 14.82 and 14.83 are equivalent, although
the specific values
of
the components will
be
different in each case. Just as the
covariant and contravariant Emponents
of
a vector are related via the metric, the
different representations
of
T
can be obtainedfrom one another using the same
metric. For example,
if
the two expressions for
T
in Equation 14.82 are equal, we
can write
Tijk
=
Mi' MJm Mk"
Timn.
(14.84)
580 TENSORS IN NON-ORTHOGONAL COORDINATE SYSTEMS
The expression in Equation 14.83 gives the same tensor when
Ti,k
=
Mj,
Ti&.
(14.85)
To
convert a set of tensor components from purely covariant to purely contravariant
form, one metric operation is needed for each index.
Coordinate system transfomtions of tensors follow the same pattern we estab-
lished for vector transformations. One transformation matrix of the appropriate kind
is used for each index. For example, we might write
T'iJk
=
g'i
ti
gnk
Ti
",
Ti;
=
tli
gJm
t;
T
Im
,,.
J
(14.86)
(14.87)
Example
14.2
Reference has been made to
the
fact that the metric is a tensor, but
we have not really proven
this
fact. The proof is straightforward. Consider the metric
elements, expressed in pure covariant form as,
M..
11
=
g..
I
g.
I'
(14.88)
The inner product between two vectors, expressed in two different coordinate systems,
can
be
written
where
MAn
=
g;
-
g;.
The transformation equations can be used to express the primed
vector components in terms of the unprimed components.
This
gives
A'
BJ
M..
11
=
A'
BJ
ty
t"j
MAn.
(14.90)
Since
this
expression must work for all possible
A
and
B,
we must have
M..
EJ
=
t7
t"j
MAn,
(14.91)
which easily inverts to give
Mii
=
gT
gni
Mmn.
(14.92)
But this is exactly how the elements of a second-rank tensor must transform,
and
so
by definition the metric is a tensor.
This
means that we can write
-
-
M
=
M..
1Jg -i
g'
-i
(14.93)
Since the metric
is
a tensor, we can modify its covariant
or
contravariant nature
as we would for any tensor. Although it might seem
a
little odd to use the metric to
modify itself, we can change a purely covariant metric to a purely contravariant form
by applying the metric twice:
NON-ORTHONORMAL COORDINATE SYSTEMS
581
We can also put the metric in mixed form by writing
Mi.
=
Mi”
M
.
J
mi.
Using the transformation equations, you can easily show that
(14.95)
Mi.
J
=
6’.
g.
1
=
6’.
J’
(14.96)
This implies that the metric tensor
is
really just a generalization
of
the Kronecker-6
tensor.
14.2.7 The Contravariance and Covariance
of
Partial Derivatives
When partial derivatives are taken with respect to a contravariant coordinate, the result
is a covariant quantity.
To
see
this,
let the contravariant coordinates in an arbitrary
pair
of
coordinate systems
be
xi
and
x‘~.
The rules
of
calculus require that
(14.97)
where there is an implied summation over the index
j.
But notice, the
dxj/dx”
term
is exactly the definition of
gJi.
This lets
us
write
d
-
d
-
-
gJi-.
dX”
dx
J
(14.98)
Comparing this expression with Equation 14.70 shows that the partial derivative
operation transforms
just
like a covariant quantity. The same type
of
argument holds
for partial derivatives with respect to covariant coordinates. In that case we find
‘a
=
tJi-,
ax
j
(14.99)
(14.100)
which says that this partial derivative acts like a contravariant quantity.
To
be consis-
tent with our superscripthubscript conventions, we impose the rule that a superscript
in the “denominator”
of
the derivative operation acts like a subscript, while a sub-
script in the denominator acts like a superscript.
This
idea was discussed briefly in
connection with the transformation matrices in Equations 14.56 and 14.58.
Example 14.3
scalar potential:
A
static electric field is often calculated by taking the gradient of a
(14.101)
582
TENSORS
IN
NON-ORTHOGONAL COORDINATE SYSTEMS
In
an earlier chapter, we defined the gradient operator
by
the relation
d4
=
v+
*
dF.
(14.102)
Since the displacement vector can be written
di
=
dxi
gi,
(14.103)
where
dxi
is a contravariant quantity,
it
is
clear the gradient
of
4
can
be
written as
(14.104)
To
check the validity of
this
expression, insert Equations 14.104 and 14.103 into the
FU-IS
of Equation 14.102 to
obtain
=
d+.
When we write the components of the electric field as
(14.105)
(
14.106)
(14.107)
they are covariant and must transform according to the relation
E,!
=
g3.E.
I
I'
(14.108)
Example
14.4
A
static magnetic field
B
can
be
calculated using
Ampere's
law:
ddT-B
=
p0Z.
(
1
4.1
09)
In
this
expression,
Z
is
the
total
current flowing through the closed path
C.
Taking
dT
to
be
a differential vector quantity with contravariant components,
as
given in
Equation 14.103, the components of the magnetic field used
in
this
integration should
be
written
in
covariant
form,
so
that
idx'
Bi
=
pol.
(1
4.1
10)
NON-ORTHONORMAL COORDINATE
SYSTEMS
583
14.2.8
Special
Relativity
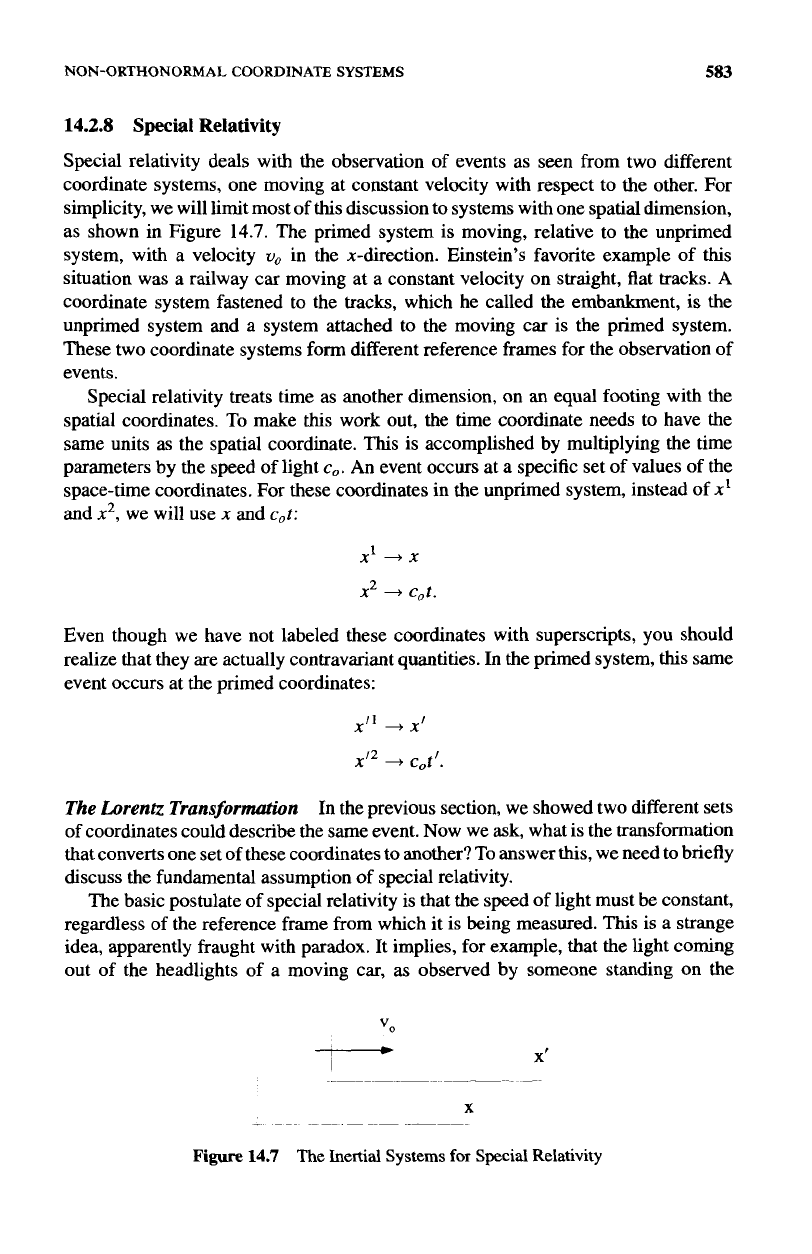
Special relativity deals with the observation of events as seen from two different
coordinate systems, one moving at constant velocity with respect to the other. For
simplicity,
we
will limit most of
this
discussion to systems with one spatial dimension,
as shown in Figure
14.7.
The primed system is moving, relative to the unprimed
system, with a velocity
v,
in the x-direction. Einstein's favorite example of
this
situation was
a
railway car moving at a constant velocity on straight, flat tracks.
A
coordinate system fastened to the tracks, which he called the embankment,
is
the
unprimed system and a system attached to the moving car is the primed system.
These two coordinate systems
form
different reference frames for the observation of
events.
Special relativity treats time as another dimension, on an equal footing with the
spatial coordinates.
To
make
this
work out, the time coordinate needs to have the
same units as the spatial coordinate.
This
is accomplished by multiplying the time
parameters
by
the speed of light
c,.
An
event occurs at a specific set of values of the
space-time coordinates. For these coordinates in the unprimed system, instead of
x1
and
x2,
we will use
x
and
cot:
x*
-+x
x2
-+
cot.
Even though
we
have not labeled these coordinates with superscripts, you should
realize that they are actually contravariant quantities.
In
the primed system,
this
same
event occurs at the primed coordinates:
x"
-+
x'
XI2
+
cot'.
The
Lorentz Transformation
In the previous section, we showed two different sets
of coordinates could describe the same event. Now we
ask,
what is the transformation
that converts one set of these coordinates to another?
To
answer
this,
we need to briefly
discuss the fundamental assumption of special relativity.
The basic postulate of special relativity is that the speed of light must be constant,
regardless of the reference frame from which it is being measured.
This
is a strange
idea, apparently fraught with paradox. It implies, for example, that the light coming
out
of
the headlights of a moving car,
as
observed by someone standing
on
the
Figure
14.7
The
Inertial Systems
for
Special
Relativity
584
TENSORS IN NON-ORTHOGONAL COORDINATE
SYSTEMS
ground outside the car, travels at the same speed, independent of the speed of the car.
It
also
has other strange consequences, such
as
the dilation of time and contraction of
lengths for fast-moving
objects.
Nevertheless,
it
has been confirmed by many different
experiments.
Our
goal here is not to delve into these ideas and their associated
paradoxes, but rather to show how the transfornation between inertial frames can be
looked at using a skewed coordinate system. For a complete introduction to the ideas
of relativity, the reader should investigate the excellent book,
Spacetime
Physics,
by
Edwin Taylor and
John
Wheeler.
What does the invariance of the
speed
of light say about the transformation matrix
that converts the unprimed coordinates to the primed coordinates?
In
terms
of
the
coordinates defined above, if an object travels at the
speed
of
light, following the line
x
=
cot,
(14.111)
then the transformation matrix
[t]
must convert
this
into
x'
=
cot',
(14.1
12)
so the object is
still
moving at the same speed in the primed coordinate system. The
linear transformation that accomplishes
this
was worked out
by
Hendrick Lorentz,
and bears
his
name. With one spatial dimension, the Lorentz transformation
is
given
in matrix form
as
where
and
(14.1
13)
(14.114)
(14.1
15)
The inversion
of
the matrix in Equation 14.113 is straightforward and gives the
elements of the
[g]
matrix
as
(14.1 16)
It should not be surprising that
this
matrix is simply
the
[t]
matrix with the sign of
vo
reversed.
The form of these transformations implies
an
important fact. Given the coordinates
of
an
event observed in the unprimed frame
(x,
cot),
the quantity
x2
-
(cot)*
is invariant
to transformation. That is,
if
we form
this
same quantity using the event's primed
NON-ORTHONORMAL COORDINATE SYSTEMS
585
components, we find that
(14.1
17)
This statement is true for any
x
and
cot,
as long as the primed and unprimed coordinates
are related by the Lorentz transformation.
This
is easily shown by substituting
x’
=
Yo
x
-
YoPo
cot
(14.118)
and
cott
=
-
yoPo
x
+
yo
cot
(14.1
19)
into the
RHS
of
Equation
14.117.
Skewed Coordinate Representation
There is a clever way, using a skewed co-
ordinate system, to visualize the relationship between the primed and unprimed
coordinates that is imposed by the Lorentz transformation. Imagine the unprimed
coordinate axes are perpendicular, and introduce the orthonormal, covariant basis
vectors
gl
andg,, as shown in Figure
14.8.
The covariant basis vectors of the primed
system can be determined using Equation
14.60
and the elements of the
gij
matrix:
(1
4.120)
Notice we have arranged the basis vectors horizontally to be consistent with the fact
that the summation
is
done over
the
first index of
g‘
.
According to these equations,
the primed basis vectors form a skewed set
of
coordinate axes, with an angle
of
8
=
tan-’
Po
between the primed and corresponding unprimed axis.
This
is shown
in Figure
14.8.
As
the relative velocity between the reference frames increases,
8
increases and the prime system becomes more drastically skewed.
This representation has several things going for it.
An
event, with coordinates
(x,
cot)
in the unprimed system and
(x’,
cot‘)
in
the primed system, can be represented
as a single point for both systems,
as
shown in Figure
14.9.
Except for a small
complication due to how the axes are scaled, the contravariant components
in
each
coordinate system can be determined by axis-parallel projections
of
the point onto the
appropriate axes. Notice, the line
x
=
cot,
called a light line, plots as the straight line
at
45”.
The same line could also be written
as
x’
=
cott,
graphically demonstrating
that the speed of light
is
invariant.
If
an object
is
observed in the unprimed frame, moving at constant velocity
x
=
vt,
the motion plots
as
a straight line in the two-dimensional coordinate systems.
If
v
<
c,,
this line must lie above the light line, as shown in Figure
14.10.
The same
line describes the motion as observed in the primed system, and
so
the motion in this
frame is still at constant velocity,
x‘
=
v’t’.
Notice, however, that
v’
#
v.
We can