Mavko G., Mukerji T., Dvorkin J. The Rock Physics Handbook
Подождите немного. Документ загружается.

However, this result is inadequate for small aspect ratio cracks with soft-fluid
saturation, such as when the parameter o ¼K
fluid
/aK is of the order of 1. Then the
appropriate equations given by O’Connell and Budiansky are
K
SC
K
¼ 1
16
9
ð1 v
2
SC
Þ
ð1 2v
SC
Þ
De
m
SC
m
¼ 1
32
45
ð1 v
SC
Þ D þ
3
ð2 v
SC
Þ
e
e ¼
45
16
ðv v
SC
Þ
ð1 v
SC
2
Þ
ð2 v
SC
Þ
Dð1 þ 3vÞð2 v
SC
Þ2ð1 2vÞ
D ¼ 1 þ
4
3p
ð1 v
2
SC
Þ
ð1 2v
SC
Þ
K
K
SC
o
1
Wu’s self-consistent modulus estimates for two-phase composites may be
expressed as (m ¼matrix, i ¼inclusion)
K
SC
¼ K
m
þ x
i
ðK
i
K
m
ÞP
i
m
SC
¼ m
m
þ x
i
ðm
i
m
m
ÞQ
i
Berryman (1980b, 1995) gives a more general form of the self-consistent approxima-
tions for N-phase composites:
X
N
i¼1
x
i
ðK
i
K
SC
ÞP
i
¼ 0
X
N
i¼1
x
i
ðm
i
m
SC
ÞQ
i
¼ 0
where i refers to the ith material, x
i
is its volume fraction, P and Q are geometric
factors given in Table 4.8.1, and the superscript *i on P and Q indicates that the
Table 4.8.1 Coefficients P and Q for some specific shapes. The subscripts
m and i refer to the background and inclusion materials (from Berryman 1995).
Inclusion shape P
mi
Q
mi
Spheres
K
m
þ
4
3
m
m
K
i
þ
4
3
m
m
m
m
þ z
m
m
i
þ z
m
Needles
K
m
þ m
m
þ
1
3
m
i
K
i
þ m
m
þ
1
3
m
i
1
5
4m
m
m
m
þ m
i
þ 2
m
m
þ g
m
m
i
þ g
m
þ
K
i
þ
4
3
m
m
K
i
þ m
m
þ
1
3
m
i
!
Disks
K
m
þ
4
3
m
i
K
i
þ
4
3
m
i
m
m
þ z
i
m
i
þ z
i
Penny cracks
K
m
þ
4
3
m
i
K
i
þ
4
3
m
i
þ pab
m
1
5
1 þ
8m
m
4m
i
þ paðm
m
þ 2b
m
Þ
þ 2
K
i
þ
2
3
ðm
i
þ m
m
Þ
K
i
þ
4
3
m
i
þ pab
m
"#
Notes:
b ¼ m
ð3KþmÞ
ð3Kþ4mÞ
; g ¼ m
ð3KþmÞ
ð3Kþ7mÞ
; z ¼
m
6
ð9Kþ8mÞ
ðKþ2mÞ
, a ¼ crack aspect ratio, a disk is a crack of zero thickness.
187 4.8 Self-consistent approximations of effective moduli

factors are for an inclusion of material i in a background medium with self-consistent
effective moduli K
SC
and m
SC
. The summation is over all phases, including minerals
and pores. These equations are coupled and must be solved by simultaneous iteration.
Although Berryman’s self-consistent method does not converge for fluid disks
(m
2
¼0), the formulas for penny-shaped fluid-filled cracks are generally not singular
and converge rapidly. However, his estimates for needles, disks, and penny cracks
should be used cautiously for fluid-saturated composite materials.
Dry cavities can be modeled by setting the inclusion moduli to zero. Fluid-
saturated cavities are simulated by setting the inclusion shear modulus to zero.
Caution
Because the cavities are isolated with respect to flow, this approach simulates
very-high-frequency saturated rock behavior appropriate to ultrasonic laboratory
conditions. At low frequencies, when there is time for wave-induced pore-pressure
increments to flow and equilibrate, it is better to find the effective moduli for dry
cavities and then saturate them with the Gassmann low-frequency relations. This
should not be confused with the tendency to term this approach a low-frequency
theory, for crack dimensions are assumed to be much smaller than a wavelength.
Calculate the self-consistent effective bulk and shear moduli, K
SC
, and m
SC
, for a
water-saturated rock consisting of spherical quartz grains (aspect ratio a ¼1) and
total porosity 0.3. The pore space consists of spherical pores (a ¼1) and thin,
penny-shaped cracks (a ¼10
–2
). The thin cracks have a porosity of 0.01, whereas
the remaining porosity (0.29) is made up of the spherical pores.
The total number of phases, N,is3.
K
1
(quartz) ¼37 GPa, m
1
(quartz) ¼44 GPa,
a
1
¼1, x
1
(volume fraction) ¼0.7
K
2
(water, spherical pores) ¼2.25 GPa,
m
2
(water, spherical pores) ¼0 GPa,
a
2
(spherical pores) ¼1, x
2
(volume fraction) ¼0.29
K
3
(water, thin cracks) ¼2.25 GPa,
m
3
(water, thin cracks) ¼0 GPa,
a
3
(thin cracks) ¼10
2
, x
3
(volume fraction) ¼0.01
The coupled equations for K
SC
and m
SC
are
x
1
ðK
1
K
SC
ÞP
1
þ x
2
ðK
2
K
SC
ÞP
2
þ x
3
ðK
3
K
SC
ÞP
3
¼ 0
x
1
ðm
1
m
SC
ÞQ
1
þ x
2
ðm
2
m
SC
ÞQ
2
þ x
3
ðm
3
m
SC
ÞQ
3
¼ 0
The P’s and Q’s are obtained from Table 4.8.1 or from the more general equation
for ellipsoids of arbitrary aspect ratio. In the equations for P and Q, K
m
and m
m
are
188 Effective elastic media: bounds and mixing laws
replaced everywhere by K
SC
and m
SC
, respectively. The coupled equations are
solved iteratively, starting from some initial guess for K
SC
and m
SC
. The Voigt
average may be taken as the starting point. The converged solutions (known as the
fixed points of the coupled equations) are K
SC
¼16.8 GPa and m
SC
¼11.6 GPa.
The coefficients P and Q for ellipsoidal inclusions of arbitrary aspect ratio are
given by
P ¼
1
3
T
iijj
Q ¼
1
5
T
ijij
1
3
T
iijj
where the tensor T
ijkl
relates the uniform far-field strain field to the strain within the
ellipsoidal inclusion (Wu, 1966). Berryman (1980b) gives the pertinent scalars
required for computing P and Q as
T
iijj
¼
3F
1
F
2
T
ijij
1
3
T
iijj
¼
2
F
3
þ
1
F
4
þ
F
4
F
5
þ F
6
F
7
F
8
F
9
F
2
F
4
where
F
1
¼ 1 þ A
3
2
ðf þ yÞR
3
2
f þ
5
2
y
4
3
F
2
¼ 1 þ A 1 þ
3
2
ðf þ yÞ
1
2
Rð3f þ 5yÞ
þ Bð3 4RÞ
þ
1
2
AðA þ 3BÞð3 4RÞ½f þ y Rðf y þ 2y
2
Þ
F
3
¼ 1 þ A 1 f þ
3
2
y
þ Rðf þ yÞ
F
4
¼ 1 þ
1
4
A½f þ 3y Rðf yÞ
F
5
¼ A f þ Rfþ y
4
3
þ Byð3 4RÞ
F
6
¼ 1 þ A½1 þ f Rðf þ yÞ þ Bð1 yÞð3 4RÞ
F
7
¼ 2 þ
1
4
A½3f þ 9y Rð3f þ 5yÞ þ Byð3 4RÞ
F
8
¼ A½1 2R þ
1
2
f ðR 1Þþ
1
2
yð5R 3Þþ Bð1 yÞð3 4RÞ
F
9
¼ A½ðR 1Þf RyþByð3 4RÞ
189 4.8 Self-consistent approximations of effective moduli
with A, B, and R given by
A ¼ m
i
=m
m
1
B ¼
1
3
K
i
K
m
m
i
m
m
and
R ¼
ð1 2v
m
Þ
2ð1 v
m
Þ
The functions y and f are given by
y ¼
a
ða
2
1Þ
3=2
aða
2
1Þ
1=2
cosh
1
a
hi
a
ð1 a
2
Þ
3=2
cos
1
a að1 a
2
Þ
1=2
hi
8
>
>
>
<
>
>
>
:
for prolate and oblate spheroids, respectively, and
f ¼
a
2
1 a
2
ð3y 2Þ
Note that a < 1 for oblate spheroids and a > 1 for prolate spheroids.
Assumptions and limitations
The approach described in this section has the following presuppositions:
idealized ellipsoidal inclusion shapes;
isotropic, linear, elastic media; and
cracks are isolated with respect to fluid flow. Pore pressures are unequilibrated and
adiabatic, which is appropriate for high-frequency laboratory conditions. For low-
frequency field situations, use dry inclusions and then saturate by using Gassmann
relations. This should not be confused with the tendency to term this approach a
low-frequency theory, for crack dimensions are assumed to be much smaller than
a wavelength.
4.9 Differential effective medium model
Synopsis
The differential effective medium (DEM) theory models two-phase composites by
incrementally adding inclusions of one phase (phase 2) to the matrix phase (Cleary
et al., 1980; Norris, 1985; Zimmerman, 1991a). The matrix begins as phase 1 (when
the concentration of phase 2 is zero) and is changed at each step as a new increment
of phase 2 material is added. The process is continued until the desired proportion of
190 Effective elastic media: bounds and mixing laws
the constituents is reached. The DEM formulation does not treat each constituent
symmetrically. There is a preferred matrix or host material, and the effective moduli
depend on the construction path taken to reach the final composite. Starting with
material 1 as the host and incrementally adding inclusions of material 2 will not, in
general, lead to the same effective properties as starting with phase 2 as the host.
For multiple inclusion shapes or multiple constituents, the effective moduli depend
not only on the final volume fractions of the constituents but also on the order in
which the incremental additions are made. The process of incrementally adding
inclusions to the matrix is really a thought experiment and should not be taken to
provide an accurate description of the true evolution of rock porosity in nature.
The coupled system of ordinary differential equations for the effective bulk and
shear moduli, K* and m*, respectively, are (Berryman, 1992b)
ð1 yÞ
d
dy
½K
ðyÞ ¼ ðK
2
K
ÞP
ð2Þ
ðyÞ
ð1 yÞ
d
dy
½m
ðyÞ ¼ ðm
2
m
ÞQ
ð2Þ
ðyÞ
with initial conditions K*(0) ¼K
1
and m*(0) ¼m
1
, where K
1
and m
1
are the bulk and
shear moduli of the intial host material (phase 1), K
2
and m
2
are the bulk and shear
moduli of the incrementally added inclusions (phase 2), and y is the concentration of
phase 2.
For fluid inclusions and voids, y equals the porosity, f. The terms P and Q are
geometric factors given in Table 4.9.1, and the superscript *2 on P and Q indicates that
the factors are for an inclusion of material 2 in a background medium with effective
moduli K*andm*. Dry cavities can be modeled by setting the inclusion moduli to zero.
Fluid-saturated cavities are simulated by setting the inclusion shear modulus to zero.
Table 4.9.1 Coefficients P and Q for some specific shapes. The subscripts m and i
refer to the background and inclusion materials (from Berryman 1995).
Inclusion shape P
mi
Q
mi
Spheres
K
m
þ
4
3
m
m
K
i
þ
4
3
m
m
m
m
þ z
m
m
i
þ z
m
Needles
K
m
þ m
m
þ
1
3
m
i
K
i
þ m
m
þ
1
3
m
i
1
5
4m
m
m
m
þ m
i
þ 2
m
m
þ g
m
m
i
þ g
m
þ
K
i
þ
4
3
m
m
K
i
þ m
m
þ
1
3
m
i
!
Disks
K
m
þ
4
3
m
i
K
i
þ
4
3
m
i
m
m
þ z
i
m
i
þ z
i
Penny cracks
K
m
þ
4
3
m
i
K
i
þ
4
3
m
i
þ pab
m
1
5
1 þ
8m
m
4m
i
þ paðm
m
þ 2b
m
Þ
þ 2
K
i
þ
2
3
ðm
i
þ m
m
Þ
K
i
þ
4
3
m
i
þ pab
m
"#
Notes:
b ¼ m
ð3KþmÞ
ð3Kþ4mÞ
; g ¼ m
ð3KþmÞ
ð3Kþ7mÞ
; z ¼
m
6
ð9Kþ8mÞ
ðKþ2mÞ
, a ¼ crack aspect ratio, a disk is a crack of zero thickness.
191 4.9 Differential effective medium model
Caution
Because the cavities are isolated with respect to flow, this approach simulates very-
high-frequency saturated rock behavior appropriate to ultrasonic laboratory condi-
tions. At low frequencies, when there is time for wave-induced pore-pressure
increments to flow and equilibrate, it is better to find the effective moduli for
dry cavities and then saturate them with the Gassmann low-frequency relations. This
should not be confused with the tendency to term this approach a low-frequency
theory, for inclusion dimensions are assumed to be much smaller than a wavelength.
The P and Q for ellipsoidal inclusions with arbitrary aspect ratio are the same as
given in Section 4.8 for the self-consistent methods, and are repeated in Table 4.9.1.
Norris et al. (1985) have shown that the DEM is realizable and therefore is always
consistent with the Hashin–Shtrikman upper and lower bounds.
The DEM equations as given above (Norris, 1985; Zimmerman, 1991b; Berryman
et al., 1992) assume that, as each new inclusion (or pore) is introduced, it displaces on
average either the host matrix material or the inclusion material, with probabilities
(1 – y) and y, respectively. A slightly different derivation by Zimmerman (1984)
(superseded by Zimmerman (1991a)) assumed that when a new inclusion is intro-
duced, it always displaces the host material alone. This leads to similar differential
equations with dy/(1 – y) replaced by dy. The effective moduli predicted by this
version of DEM are always slightly stiffer (for the same inclusion geometry and
concentration) than the DEM equations given above. They both predict the same first-
order terms in y but begin to diverge at concentrations above 10%. The dependence of
effective moduli on concentration goes as e
2y
¼ð1 2y þ 2y
2
Þfor the version
without (1 y), whereas it behaves as (1 y)
2
¼(1 2y þy
2
) for the version with
(1 y). Including the (1 y) term makes the results of Zimmerman (1991a) consistent
with the Hashin–Shtrikman bounds. In general, for a fixed inclusion geometry and
porosity, the Kuster–Tokso
¨
z effective moduli are stiffer than the DEM predictions,
which in turn are stiffer than the Berryman self-consistent effective moduli.
An important conceptual difference between the DEM and self-consistent schemes
for calculating effective moduli of composites is that the DEM scheme identifies one
of the constituents as a host or matrix material in which inclusions of the other
constituent(s) are embedded, whereas the self-consistent scheme does not identify any
specific host material but treats the composite as an aggregate of all the constituents.
Modified DEM with critical porosity constraints
In the usual DEM model, starting from a solid initial host, a porous material stays
intact at all porosities and falls apart only at the very end when y ¼1 (100% porosity).
This is because the solid host remains connected, and therefore load bearing.
Although DEM is a good model for materials such as glass foam (Berge et al.,
1993) and oceanic basalts (Berge et al., 1992), most reservoir rocks fall apart at
192 Effective elastic media: bounds and mixing laws
a critical porosity, f
c
, significantly less than 1.0 and are not represented very well by
the conventional DEM theory. The modified DEM model (Mukerji et al., 1995a)
incorporates percolation behavior at any desired f
c
by redefining the phase 2 end-
member. The inclusions are now no longer made up of pure fluid (the original phase 2
material) but are composite inclusions of the critical phase at f
c
with elastic moduli
(K
c
, m
c
). With this definition, y denotes the concentration of the critical phase in the
matrix. The total porosity is given by f ¼yf
c
.
The computations are implemented by replacing (K
2
, m
2
) with (K
c
, m
c
) everywhere
in the equations. Integrating along the reverse path, from f ¼f
c
to f ¼0 gives lower
moduli, for now the softer critical phase is the matrix. The moduli of the critical phase
may be taken as the Reuss average value at f
c
of the pure end-member moduli.
Because the critical phase consists of grains just barely touching each other, better
estimates of K
c
and m
c
may be obtained from measurements on loose sands, or from
models of granular material. For porosities greater than f
c
, the material is a suspen-
sion and is best characterized by the Reuss average (or Wood’s equation).
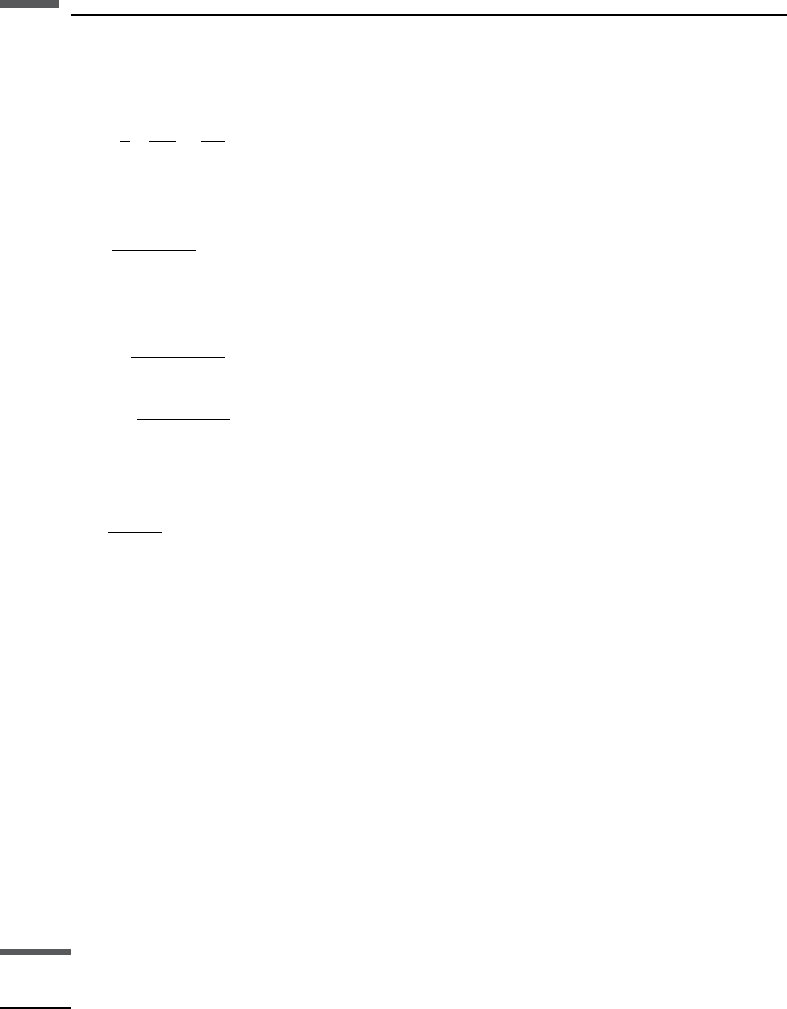
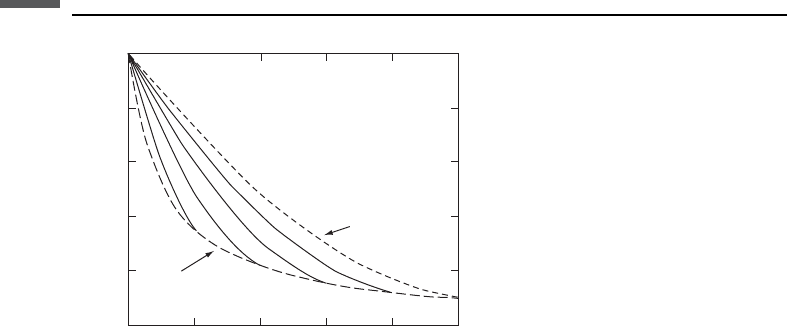
Figure 4.9.1 shows normalized bulk-modulus curves for the conventional
DEM theory (percolation at f ¼1) and for the modified DEM (percolation at
f
c
< 1) for a range of f
c
values. When f
c
¼1, the modified DEM coincides with
the conventional DEM curve. The shapes of the inclusions were taken to be spheres.
The path was from 0 to f
c
, and (K
c
, m
c
) were taken as the Reuss-average values at f
c
.
For this choice of (K
c
, m
c
), estimates along the reversed path coincide with the Reuss
curve.
Uses
The purpose of the differential effective-medium model is to estimate the effective
elastic moduli of a rock in terms of its constituents and pore space.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Bulk moduli (normalized)
Porosity
0.4
0.6
0.8
1.0
Reuss
f
c
= 0.2
DEM
Figure 4.9.1 Normalized bulk-modulus curves for the conventional DEM theory (percolation
at f ¼ 1) and for the modified DEM (percolation at f
c
< 1) for a range of f
c
values.
193 4.9 Differential effective medium model
Assumptions and limitations
The following assumptions and limitations apply to the differential effective-medium
model:
the rock is isotropic, linear, and elastic;
the process of incrementally adding inclusions to the matrix is a thought experiment
and should not be taken to provide an accurate description of the true evolution of
rock porosity in nature;
idealized ellipsoidal inclusion shapes are assumed; and
cracks are isolated with respect to fluid flow. Pore pressures are unequilibrated and
adiabatic. The model is appropriate for high-frequency laboratory conditions. For low-
frequency field situations, use dry inclusions and then saturate using Gassmann relations.
This should not be confused with the tendency to term this approach a low-frequency
theory, for crack dimensions are assumed to be much smaller than a wavelength.
4.10 Hudson’s model for cracked media
Synopsis
Hudson’s model is based on a scattering-theory analysis of the mean wavefield in an
elastic solid with thin, penny-shaped ellipsoidal cracks or inclusions (Hudson, 1980,
1981). The effective moduli c
eff
ij
are given as
c
eff
ij
¼ c
0
ij
þ c
1
ij
þ c
2
ij
where c
0
ij
are the isotropic background moduli, and c
1
ij
, c
2
ij
are the first- and second-
order corrections, respectively. (See Section 2.2 on anisotropy for the two-index
notation of elastic moduli. Note also that Hudson uses a slightly different definition
and that there is an extra factor of 2 in his c
44
, c
55
, and c
66
. This makes the equations
given in his paper for c
1
44
and c
2
44
slightly different from those given below, which are
consistent with the more standard notation described in Section 2.2 on anisotropy.)
For a single crack set with crack normals aligned along the 3-axis, the cracked
media show transverse isotropic symmetry, and the corrections are
c
1
11
¼
l
2
m
eU
3
c
1
13
¼
lðl þ 2mÞ
m
eU
3
c
1
33
¼
ðl þ 2mÞ
2
m
eU
3
c
1
44
¼meU
1
c
1
66
¼0
194 Effective elastic media: bounds and mixing laws

and (superscripts on c
ij
denote second order, not quantities squared)
c
2
11
¼
q
15
l
2
ðl þ 2mÞ
ðeU
3
Þ
2
c
2
13
¼
q
15
lðeU
3
Þ
2
c
2
33
¼
q
15
ðl þ 2mÞðeU
3
Þ
2
c
2
44
¼
2
15
mð3l þ 8mÞ
l þ 2m
ðeU
1
Þ
2
c
2
66
¼ 0
where
q ¼ 15
l
2
m
2
þ 28
l
m
þ 28
e ¼
N
V
a
3
¼
3
4pa
¼ crack density
The isotropic background elastic moduli are l and m,anda and a are the crack radius
and aspect ratio, respectively. The corrections c
1
ij
and c
2
ij
obey the usual symmetry
properties for transverse isotropy or hexagonal symmetry (see Section 2.2 on anisotropy).
Caution
The second-order expansion is not a uniformly converging series and predicts
increasing moduli with crack density beyond the formal limit (Cheng, 1993).
Better results will be obtained by using just the first-order correction rather than
inappropriately using the second-order correction. Cheng gives a new expansion
based on the Pade
´
approximation, which avoids this problem.
The terms U
1
and U
3
depend on the crack conditions. For dry cracks
U
1
¼
16ðl þ 2mÞ
3ð3l þ 4mÞ
U
3
¼
4ðl þ 2mÞ
3ðl þ mÞ
For “weak” inclusions (i.e., when ma=ðK
0
þ
4
3
m
0
Þ is of the order of 1 and is not small
enough to be neglected)
U
1
¼
16ðl þ 2mÞ
3ð3l þ 4mÞ
1
ð1 þ MÞ
U
3
¼
4ðl þ 2mÞ
3ðl þ mÞ
1
ð1 þ k Þ
195 4.10 Hudson’s model for cracked media

where
M ¼
4m
0
pam
ðl þ 2mÞ
ð3l þ 4mÞ
k ¼
ðK
0
þ
4
3
m
0
Þðl þ 2mÞ
pamðl þ mÞ
where K
0
and m
0
are the bulk and shear modulus of the inclusion material. The criteria
for an inclusion to be “weak” depend on its shape or aspect ratio a as well as on the
relative moduli of the inclusion and matrix material. Dry cavities can be modeled by
setting the inclusion moduli to zero. Fluid-saturated cavities are simulated by setting
the inclusion shear modulus to zero.
Caution
Because the cavities are isolated with respect to flow, this approach simulates very-
high-frequency behavior appropriate to ultrasonic laboratory conditions. At low
frequencies, when there is time for wave-induced pore-pressure increments to flow
and equilibrate, it is better to find the effective moduli for dry cavities and then
saturate them with the Brown and Korringa low-frequency relations (Section 6.5).
This should not be confused with the tendency to term this approach a low-frequency
theory, for crack dimensions are assumed to be much smaller than a wavelength.
Hudson also gives expressions for infinitely thin, fluid-filled cracks:
U
1
¼
16ðl þ2 mÞ
3ð3l þ4 mÞ
U
3
¼ 0
These assume no discontinuity in the normal component of crack displacements and
therefore predict no change in the compressional modulus with saturation. There is,
however, a shear displacement discontinuity and a resulting effect on shear stiffness.
This case should be used with care.
The first-order changes l
1
and m
1
in the isotropic elastic moduli l and m of a
material containing randomly oriented inclusions are given by
m
1
¼
2m
15
eð3U
1
þ 2U
3
Þ
3l
1
þ 2m
1
¼
ð3l þ 2mÞ
2
3m
eU
3
These results agree with the self-consistent results of Budiansky and O’Connell (1976).
For two or more crack sets aligned in different directions, corrections for each
crack set are calculated separately in a crack-local coordinate system with the 3-axis
normal to the crack plane and then rotated or transformed back (see Section 1.4 on
coordinate transformations) into the coordinates of c
eff
ij
; finally the results are added to
196 Effective elastic media: bounds and mixing laws