Patrick F. Dunn, Measurement, Data Analysis, and Sensor Fundamentals for Engineering and Science, 2nd Edition
Подождите немного. Документ загружается.

106 Measurement and Data Analysis for Engineering and Science
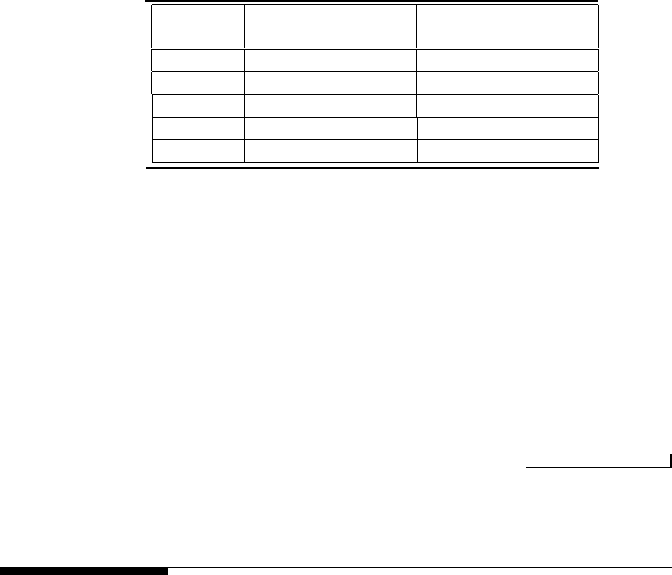
Velocity
Measured voltage
Calculated voltage
U (m/s)
E
m
(V)
E
c
(V)
0.00
3.19
3.19
3.05
3.99
3.99
6.10
4.30
4.28
9.14
4.48
4.49
12.20
4.65
4.66
TABLE 4.1
Hot-wire anemometer system calibration data.
between the measured and calculated voltages is 0.02 V, which occurs at a velocity of
6.10 m/s. Thus, the maximum absolute error, e
abs
, is 0.02 V, as defined by Equation
4.1. The relative error, e
rel
, is defined by Equation 4.2. This also occurs at a velocity of
6.10 m/s, although maximum relative error does not always occur at the same calibra-
tion point as the maximum absolute error. Here, e
rel
= 0.02/4.30 = 0.01, rounded to
the correct number of significant figures. Consequently, by Equation 4.3, the accuracy
at the point of maximum relative error is 1 − 0.01 = 0.99, or 99 %.
4.3 Dynamic Response Characterization
In reality, almost every measurement system does not respond instanta-
neously to an input that varies in time. Often there is a time delay and
amplitude difference between the system’s input and output signals. This
obviously creates a measurement problem. If these effects are not accounted
for, dynamic errors will be introduced into the results.
To properly assess and quantify these effects, an understanding of how
measurement systems respond to transient input signals must be gained. The
ultimate goal would be to determine the output (response) of a measurement
system for all conceivable inputs. The dynamic error in the measurement can
be related to the difference between the input and output at a given time.
In this chapter, only the basics of this subject will be covered. The response
characteristics of several specific systems (zero, first, and second-order) to
specific transient inputs (step and sinusoidal) will be studied. Hopefully, this
brief foray into dynamic system response will give an appreciation for the
problems that can arise when measuring time-varying phenomena.
First, examine the general formulation of the problem. The output signal,
y(t), in response to the input forcing function of a linear system, F (t), can be
modeled by a linear ordinary differential equation with constant coefficients
(a
0
, ..., a
n
) of the form
Calibration and Response 107
a
n
d
n
y
dt
n
+ a
n−1
d
n−1
y
dt
n−1
+ ... + a
1
dy
dt
+ a
0
y = F (t). (4.4)
In this equation n represents the order of the system. The input forcing
function can be written as
F (t) = b
m
d
m
x
dt
m
+ b
m−1
d
m−1
x
dt
m−1
+ ... + b
0
x, m ≤ n, (4.5)
where b
0
, ..., b
n
are constant coefficients, x = x(t) is the forcing function, and
m represents its order, where m must always be less than or equal to n to
avoid having an over-deterministic system. By writing F (t) as a polynomial,
the ability to describe almost any shape of forcing function is retained.
The output response, y(t), actually represents a physical variable fol-
lowed in time. For example, it could be the displacement of the mass of an
accelerometer positioned on a fluttering aircraft wing or the temperature
of a thermocouple positioned in the wake of a heat exchanger. The exact
ordinary differential equation governing each circumstance is derived from a
conservation law, for example, from Newton’s second law for the accelerom-
eter or from the first law of thermodynamics for the thermocouple.
To solve for the output response, the exact form of the input forcing
function, F (t), must be specified. This is done by choosing values for the
b
0
, ..., b
n
coefficients and m. Then Equation 4.4 must be integrated subject
to the initial conditions.
In this chapter, two types of input forcing functions, step and sinusoidal,
are considered for linear, first-order, and second-order systems. There are
analytical solutions for these situations. Further, as will be shown in Chap-
ter 9, almost all types of functions can be described through Fourier analysis
in terms of the sums of sine and cosine functions. So, if a linear system’s re-
sponse for sinusoidal-input forcing is determined, then its response to more
complicated input forcing can be described. This is done by linearly su-
perimposing the outputs determined for each of the sinusoidal-input forcing
components that were identified by Fourier analysis. Finally, note that many
measurement systems are linear, but not all. In either case, the response of
the system almost always can be determined numerically. Numerical solu-
tion methods for such a model will be discussed in Section 4.8.
Now consider some particular systems by first specifying the order of
the systems. This is done by substituting a particular value for n into Equa-
tion 4.4.
• For n = 0, a zero-order system is specified by
a
0
y = F (t). (4.6)

108 Measurement and Data Analysis for Engineering and Science
Instruments that behave like zero-order systems are those whose output
is directly coupled to its input. An electrical-resistance strain gage in
itself is an excellent example of a zero-order system, where an input
strain directly causes a change in the gage resistance. However, dynamic
effects can occur when a strain gage is attached to a flexible structure.
In this case the response must be modeled as a higher-order system.
• For n = 1, a first-order system is given by
a
1
˙y + a
0
y = F (t). (4.7)
Instruments whose responses fall into the category of first-order systems
include thermometers, thermocouples, and other similar simple systems
that produce a time lag between the input and output due to the capacity
of the instrument. For thermal devices, the heat transfer between the
environment and the instrument coupled with the thermal capacitance
of the instrument produces this time lag.
• For n = 2, a second-order system is specified by
a
2
¨y + a
1
˙y + a
0
y = F (t). (4.8)
Examples of second-order instruments include diaphragm-type pressure
transducers, U-tube manometers, and accelerometers. This type of sys-
tem is characterized by its inertia. In the U-tube manometer, for exam-
ple, the fluid having inertia is moved by a pressure difference.
The responses of each of these systems are examined in the following
sections.
4.4 Zero-Order System Dynamic Response
For a zero-order system the equation is
y =
1
a
0
F (t) = KF (t), (4.9)
where K is called the static sensitivity or steady-state gain. It can be seen
that the output, y(t), exactly follows the input forcing function, F (t), in time
and that y(t) is amplified by a factor, K. Hence, for a zero-order system,
a plot of the output signal values (on the ordinate) versus the input signal
values (on the abscissa) should yield a straight line of slope, K. In fact,
Calibration and Response 109
instrument manufacturers often provide values for the steady-state gains of
their instruments. These values are obtained by performing static calibration
experiments.
4.5 First-Order System Dynamic Response
First-order systems are slightly more complicated. Their governing equation
is
τ ˙y + y = KF (t), (4.10)
where τ is the time constant of the system = a
1
/a
0
. When the time
constant is small, the derivative term in Equation 4.10 becomes negligible
and the equation reduces to that of a zero-order system. That is, the smaller
the time constant, the more instantaneous is the response of the system.
Now digress for a moment and examine the origin of a first-order-system
equation. Consider a standard glass bulb thermometer initially at room
temperature that is immersed into hot water. The thermometer takes a
while to read the correct temperature. However, it is necessary to obtain an
equation of the thermometer’s temperature as a function of time after it is
immersed in the hot water in order to be more specific.
Start by considering the liquid inside the bulb as a fixed mass into which
heat can be transferred. When the thermometer is immersed into the hot
water, heat (a form of energy) will be transferred from the hotter body
(the water) to the cooler body (the thermometer’s liquid). This leads to an
increase in the total energy of the liquid. This energy transfer is governed
by the first law of thermodynamics (conservation of energy), which is
dE
dt
=
dQ
dt
, (4.11)
in which E is the total energy of the thermometer’s liquid, Q is the heat
transferred from the hot water to the thermometer’s liquid, and t is time.
The rate at which the heat is transferred into the thermometer’s liquid de-
pends upon the physical characteristics of the interface between the outside
of the thermometer and the hot water. The heat is transferred convectively
to the glass from the hot water and is described by
dQ
dt
= hA[T
hw
− T ], (4.12)
where h is the convective heat transfer coefficient, A is the surface area over
which the heat is transferred, and T
hw
is the temperature of the hot water.
Here it is assumed implicitly that there are no conductive heat transfer
losses in the glass. All of the heat transferred from the hot water through

110 Measurement and Data Analysis for Engineering and Science
the glass reaches the thermometer’s liquid. Now as the energy is stored
within the liquid, its temperature increases. For energy within the liquid to
be conserved, it must be that
dE
dt
= mC
v
dT
dt
, (4.13)
where T is the liquid’s temperature, m is its mass, and C
v
is its specific heat
at constant volume.
Thus, upon substitution of Equations 4.12 and 4.13 into Equation 4.11,
mC
v
dT
dt
= hA[T
hw
− T ]. (4.14)
Rearranging,
mC
v
hA
dT
dt
+ T = T
hw
. (4.15)
Comparing this equation to Equation 4.10 it can be seen that y = T ,
τ = mC
v
/hA, and T
hw
= F (t), with K = 1. This is the linear, first-order
differential equation with constant coefficients that relates the time rate of
change in the thermometer’s liquid temperature to its temperature at any
instance of time and the conditions of the situation. Equation 4.15 must be
integrated to obtain the desired equation of the thermometer’s temperature
as a function of time after it is immersed in the hot water.
Another example of a first-order system is an electrical circuit comprised
of a resistor of resistance, R, a capacitor of capacitance, C, both in series
with a voltage source with voltage, E
i
(t). The voltage differences, ∆V , across
each component in the circuit are ∆V = RI for the resistor and ∆V = Q/C
for the capacitor, where the current, I, is related to the charge, Q, by I =
dQ/dt. Application of Kirchhoff’s voltage law to the circuit gives
RC
dV
dt
+ V = E
i
(t). (4.16)
Comparing this equation to Equation 4.10 gives τ = RC and K = 1.
Now proceed to solve a first-order system equation to determine the
response of the system subject to either a step change in conditions (by
assuming a step-input forcing function) or a periodic change in conditions
(by assuming a sinusoidal-input forcing function). The former, for example,
could be the temperature of a thermometer as a function of time after it is
exposed to a sudden change in temperature, as was examined above. The
latter, for example, could be the temperature of a thermocouple in the wake
behind a heated cylinder.
Calibration and Response 111
4.5.1 Response to Step-Input Forcing
Start by considering the governing equation for a first-order system
τ ˙y + y = KF (t), (4.17)
where the step-input forcing function, F (t), is defined as A for t > 0 and
the initial condition y(0) = y
0
. Equation 4.17 is a linear, first-order ordinary
differential equation. Its general solution (see [24]) is of the form
y(t) = c
0
+ c
1
e
−
t
τ
. (4.18)
Substitution of this expression for y and the expression for its derivative
˙y into Equation 4.17 yields c
0
= KA. Subsequently, applying the initial
condition to Equation 4.18 gives c
1
= y
0
− KA. Thus, the specific solution
can be written as
y(t) = KA + (y
0
− KA) e
−
t
τ
. (4.19)
Now examine this equation. When the time equals zero, the exponential
term is unity, which gives y(0) = y
0
. Also, when time becomes very large
with respect to τ, the exponential term tends to zero, which gives an output
equal to KA. Hence, the output rises exponentially from its initial value
of y
o
at t = 0 to its final value of KA at t >> τ . This is what is seen
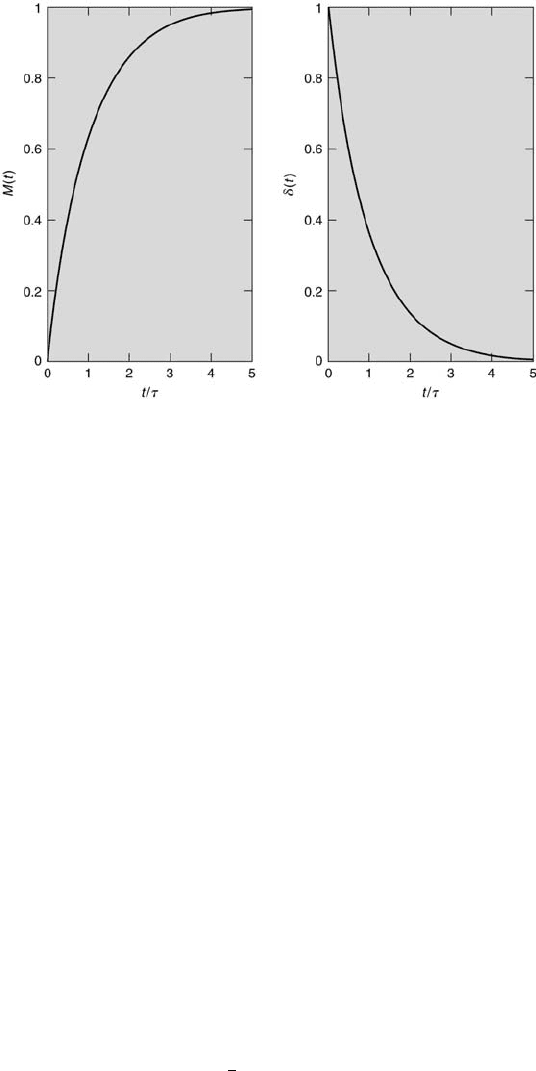
in the solution, as shown in the left graph of Figure 4.2. Note that at the
dimensionless time t/τ = 1, the value the signal reaches approximately two-
thirds (actually 1 −
1
e
or 0.6321) of its final value. The time that it takes
the system to reach 90 % of its final value (which occurs at t/τ = 2.303)
is called the rise time of a first-order system. At t/τ = 5 the signal has
reached greater than 99 % of its final value.
The term y
0
can be subtracted from both sides of Equation 4.19 and
then rearranged to yield
M(t) ≡
y(t) − y
0
y
∞
− y
0
= 1 − e
−
t
τ
, (4.20)
noting that y
∞
= KA. M(t) is called the magnitude ratio and is a di-
mensionless variable that represents the change in y at any time t from its
initial value divided by its maximum possible change. When y reaches its
final value, M(t) is unity. The right side of Equation 4.20 is a dimensionless
time, t/τ. Equation 4.20 is valid for all first-order systems responding to
step-input forcing because the equation is dimensionless.
Alternatively, Equation 4.19 can be rearranged directly to give
y(t) − y
∞
y
0
− y
∞
= e
−
t
τ
≡ δ(t). (4.21)
112 Measurement and Data Analysis for Engineering and Science
FIGURE 4.2
Response of a first-order system to step-input forcing.
In this equation δ(t) represents the fractional difference of y from its final
value. This can be interpreted as the fractional dynamic error in y. From
Equations 4.20 and 4.21,
δ(t) = 1 − M(t). (4.22)
This result is plotted in the right graph of Figure 4.2. At the dimensionless
time t/τ = 1, δ equals 0.3678 = 1/e. Further, at t/τ = 5, the dynamic error
is essentially zero (= 0.007). That means for a first-order system subjected
to a step change in input it takes approximately five time constants for
the output to reach the input value. For perfect measurement system there
would be no dynamic error (δ(t) = 0) and the output would always follow
the input [M(t) = 1].
4.5.2 Response to Sinusoidal-Input Forcing
Now consider a first-order system that is subjected to an input that varies
sinusoidally in time. The governing equation is
τ ˙y + y = KF (t) = KA sin(ωt), (4.23)
where K and A are arbitrary constants. The units of K would be those of
y divided by those of A. The general solution is
y(t) = y
h
+ y
p
= c
0
e
−
t
τ
+ c
1
+ c
2
sin(ωt) + c
3
cos(ωt), (4.24)
Calibration and Response 113
in which c
0
through c
3
are constants, where the first term on the right side
of this equation is the homogeneous solution, y
h
, and the remaining terms
constitute the particular solution, y
p
.
The constants c
1
through c
3
can be found by substituting the expressions
for y(t) and its derivative into Equation 4.23. By comparing like terms in
the resulting equation,
c
1
= 0, (4.25)
c
2
=
KA
ω
2
τ
2
+ 1
, (4.26)
and
c
3
= −ωτ C
2
=
−ωτKA
ω
2
τ
2
+ 1
. (4.27)
The constant c
0
can be found by applying the initial condition y(0) = y
0
to
Equation 4.24, where
c
0
= y + 0 − c
3
=
ωτKA
ω
2
τ
2
+ 1
. (4.28)
Thus, the final solution becomes
y(t) = (y
0
+ ωτ D)e
−
t
τ
+ D sin(ωt) − ωτ D cos(ωt), (4.29)
where
D =
KA
ω
2
τ
2
+ 1
. (4.30)
Now Equation 4.29 can be simplified further. The sine and cosine terms
can be combined in Equation 4.29 into a single sine term using the trigono-
metric identity
α cos(ωt) + β sin(ωt) =
p
α
2
+ β
2
sin(ωt + φ), (4.31)
where
φ = tan
−1
(α/β). (4.32)
Equating this expression with the sine and cosine terms in Equation 4.29
gives α = −ωτD and β = D. Thus,
D sin(ωt) − ωτ D cos(ωt) = D
p
ω
2
τ
2
+ 1 =
KA
√
ω
2
τ
2
+ 1
(4.33)
and
114 Measurement and Data Analysis for Engineering and Science
φ = tan
−1
(−ωτ) = −tan
−1
(ωτ), (4.34)
or, in units of degrees,
φ
◦
= −(180/π) tan
−1
(ωτ). (4.35)
The minus sign is present in Equations 4.34 and 4.35 by convention to denote
that the output lags behind the input.
The final solution is
y(t) = y
0
+ (
ωτKA
ω
2
τ
2
+ 1
)e
−
t
τ
+
KA
√
ω
2
τ
2
+ 1
sin(ωt + φ). (4.36)
The first term on the right side represents the transient response while
the second term is the steady-state response. For ωτ << 1, the transient
term becomes very small and the output follows the input. For ωτ >> 1,
the output is droplets attenuated and its phase is shifted from the input by
φ radians. The phase lag in seconds (lag time), β, is given by
β = φ/ω. (4.37)
Examine this response further in a dimensionless sense. The magnitude
ratio for this input-forcing situation is the ratio of the magnitude of the
steady-state output to that of the input. Thus,
M(ω) =
KA/
√
ω
2
τ
2
+ 1
KA
=
1
√
ω
2
τ
2
+ 1
. (4.38)
The dynamic error, using its definition in Equation 4.22 and Equation 4.38,
becomes
δ(ω) = 1 −
1
√
ω
2
τ
2
+ 1
. (4.39)
Shown in Figures 4.3 and 4.4, respectively, are the magnitude ratio and
the phase shift plotted versus the product ωτ. First examine Figure 4.3. For
values of τω less than approximately 0.1, the magnitude ratio is very close
to unity. This implies that the system’s output closely follows its input in
this range. At ωτ equal to unity, the magnitude ratio equals 0.707, that is,
the output amplitude is approximately 71 % of its input. Here, the dynamic
error would be 1 − 0.707 = 0.293 or approximately 29 %. Now look at
Figure 4.4. When ωτ is unity, the phase shift equals −45
◦
. That is, the
output signal lags the input signal by 45
◦
or 1/8th of a cycle.
The magnitude ratio often is expressed in units of decibels, abbreviated
as dB. The decibel’s origin began with the introduction of the Bel, defined
in terms of the ratio of output power, P
2
, to the input power, P
1
, as
Bel = log
10
(P
2
/P
1
). (4.40)
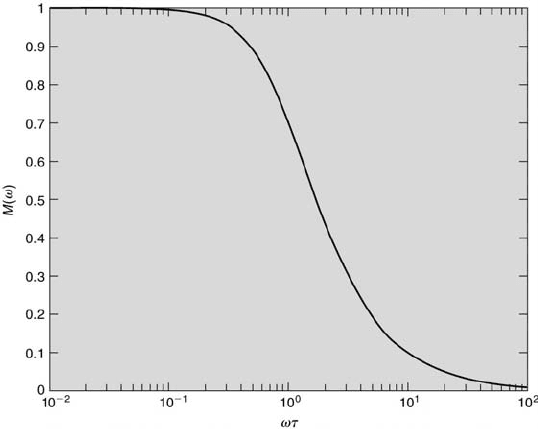
Calibration and Response 115
FIGURE 4.3
The magnitude ratio of a first-order system responding to sinusoidal-input
forcing.
To accommodate the large power gains (output/input) that many systems
had, the decibel (equal to 10 Bels) was defined as
Decibel = 10 log
10
(P
2
/P
1
). (4.41)
Equation 4.41 is used to express sound intensity levels, where P
2
corresponds
to the sound intensity and P
1
to the reference intensity, 10
−12
W/m
2
, which
is the lowest intensity that humans can hear. The Saturn V on launch has
a sound intensity of 172 dB; human hearing pain occurs at 130 dB; a soft
whisper at a distance of 5 m is 30 dB.
There is one further refinement in this expression. Power is a squared
quantity, P
2
= Q
2
2
and P
1
= Q
1
2
, where Q
2
and Q
1
are the base measur-
ands, such as volts for an electrical system. With this in mind, Equation 4.41
becomes
Decibel = 10 log
10
(Q
2
/Q
1
)
2
= 20 log
10
(Q
2
/Q
1
). (4.42)
Equation 4.42 is the basic definition of the decibel as used in measure-
ment engineering. Finally, Equation 4.42 can be written in terms of the
magnitude ratio
dB = 20 log
10
M(ω). (4.43)