Руководство по техобслуживанию УЧПУ FANUC
Подождите немного. Документ загружается.

ПРОГРАММИРОВАНИЕ
B--63844RU/02
20. ФУНКЦИИ УПРАВЛЕНИЯ ОСЯМИ
397
Данная функция предотвращает переполнение значения
координат для оси вращения. Функция предотвращения выхода
за пределы координат активируется путем присвоения биту 0
параметра ROAx 1008 значения 1.
При команде приращения инструмент перемещается на угол,
заданный командой. При выполнении абсолютной команды
координатами после перемещения инструмента являются
значения, заданныевпараметреном.1260иповернутыенаугол,
соответствующий одному обороту. Инструмент перемещается в
направлении, в котором конечные координаты расположены
ближе всего, если бит 1 параметра RABx ном. 1008 имеет
значение 0. Отображенные относительные координаты также
поворачиваются на угол, соответствующий одному обороту,
если бит 2 параметра RRLx ном. 1008 имеет значение 1.
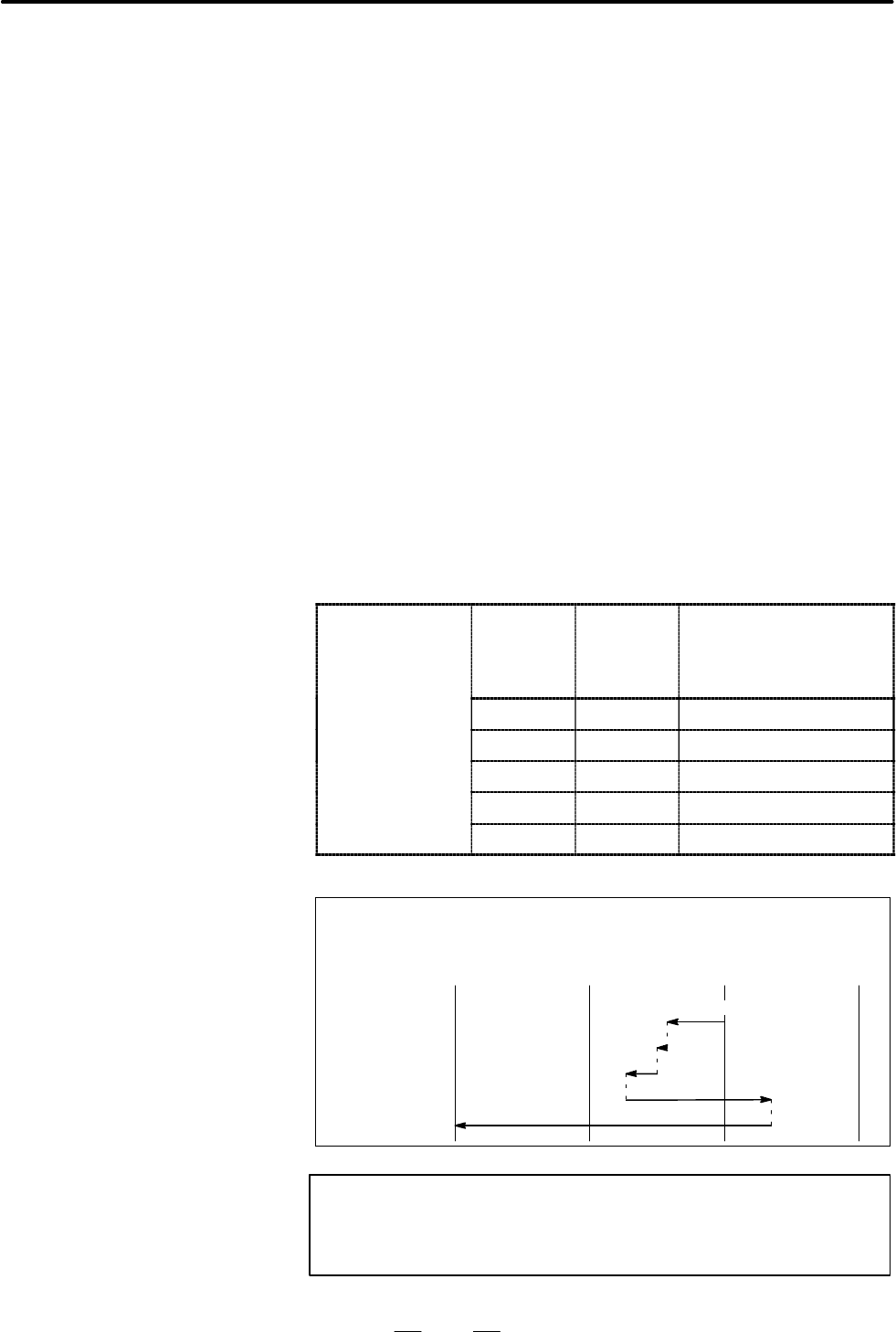
Предположим, что ось A является осью вращения и что
величина перемещения за оборот составляет 360.000 (параметр
ном. 1260 = 360000). Если следующая программа выполняется с
применением функции предотвращения выхода за пределы
координат оси вращения, то перемещение по оси
осуществляется, как показано ниже.
G90A0;
Номер
последо-
ватель-
ности
Фактич.
величина
переме-
щения
Значение абсолютных
координат после
завершения
перемещения
N1 G90 A--150.0 ; N1 --150 210
N2 G90 A540.0 ; N2 --30 180
N3 G90 A--620.0 ; N3 --80 100
N4 G91 A380.0 ; N4 +380 120
N5 G91 A--840.0 ; N5 --840 0
Значение
относительных
координат
--720°
--0°
--360°
--0° --0°
--0°
360°
--0°
N1
N2
N3
N4
N5
210°(Абсолютное)
180°
100°
120°
Значение
абсолютных
координат
ПРИМЕЧАНИЕ
Эта функция не может использоваться вместе с
функцией индексации индексной таблицы.
20.2
ВЫХОД ЗА ПРЕДЕЛЫ
КООРДИНАТ
КРУГОВЫХ ОСЕЙ
Пояснения
Примеры
ПРОГРАММИРОВАНИЕ20. ФУНКЦИИ УПРАВЛЕНИЯ ОСЯМИ
B--63844RU/02
398
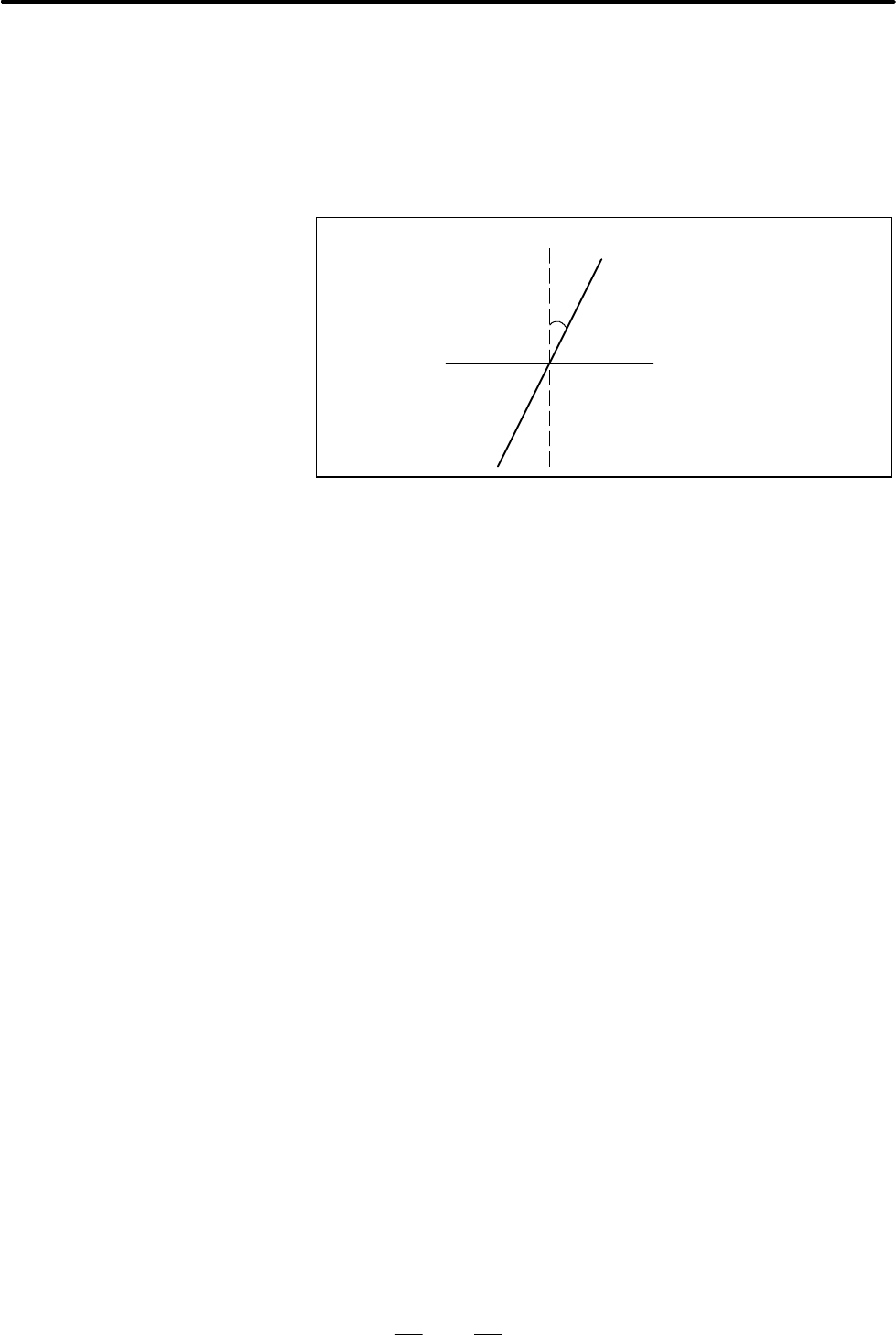
Когда наклонная ось и перпендикулярная ось образуют угол,
отличный от 90°, функция управления наклонной осью регу-
лирует расстояние, пройденное вдоль каждой оси, в соответ-
ствии с углом наклона. При создании программы предпо-
лагалось, что наклонная ось и перпендикулярная ось пересека-
ются под прямым углом. Тем не менее, фактически пройденное
расстояние регулируется в соответствии с углом наклона.
+Y
+Y Фактически используемая
система координат
(наклонная ось)
Система координат программы
+Z (перпендикулярная ось)
θ
θ : Угол наклона
Когда наклонной осью является ось Y, а перпендикулярной
осью - ось Z, величина перемещения вдоль каждой оси
регулируется согласно формулам, приведенным ниже.
Расстояние, пройденное вдоль оси Х, определяется по
следующей формуле:
Ya=Yp/cos θ
Расстояние, пройденное вдоль оси Z, корректируется с учетом
наклона оси Y и определяется по следующей формуле:
Za=Zp-Yp*tan θ
Составляющая скорости по оси Y определяется по следующей
формуле:
Fa=Fp/cos θ
Ya, Za, Fa : Фактическое расстояние и скорость
Yp, Zp, Fp : Расчетное расстояние и скорость
Необходимо предварительно задать с помощью параметров
(ном.8211и 8212) наклонную и перпендикулярную оси, для
которых будет применено управление наклонной осью.
Параметр AA C (ном. 8200#0) активирует или отключает функ-
цию управления наклонной осью. Если эта функция активиро-
вана, то расстояние, пройденное вдоль каждой оси, регули-
руется в соответствии с параметром угла наклона (ном.8210).
Параметр AZR (ном. 8200#2) разрешает ручной возврат в
референтную точку по наклонной оси только на расстояние,
пройденное по наклонной оси.
При присвоении сигналу отмены управления вертикальной /
наклонной осью NOZAGC значения 1 будет доступно управле-
ние наклонной осью только для наклонной оси. При этом нак-
лонные оси преобразуются в оси наклонной системы коор-
динат, не влияя на команды, относящиеся к вертикальной оси.
Абсолютные и относительные координаты указываются в
запрограммированной прямоугольной системе координат.
20.3
УПРАВЛЕНИЕ
НАКЛОННОЙ ОСЬЮ
Пояснения
D Метод использования
D Недействительность
вертикальной оси
D Отображение абсо-
лютных и относи-
тельных координат
ПРОГРАММИРОВАНИЕ
B--63844RU/02
20. ФУНКЦИИ УПРАВЛЕНИЯ ОСЯМИ
399
Указание положения станка предусмотрено в системе
машинных координат, где фактическое перемещение
происходит в соответствии с углом наклона. Тем не менее, когда
выполняется преобразование дюймы/метрические единицы,
указывается то положение, которое получено посредством
применения преобразования дюймы/метрические единицы к
результату определения угла наклона.
ОПАСНО
1 После задания параметров управления наклонной
осью не забудьте выполнить операцию ручного
возврата на референтную позицию.
2 Если ручной возврат на референтную позицию был
выполнен по наклонной оси, выполните также ручной
возврат на референтную позицию по
перпендикулярной оси.
Сигнал тревоги P/S ном. 090 подается при попытке
ручного возврата на референтную позицию по
перпендикулярной оси, если по наклонной оси не
достигнута точка начала координат.
3 После перемещения инструмента вдоль наклонной
оси, если сигнал отключения управления
перпендикулярной/наклонной осью NOZAGC
установлен на 1, необходимо выполнить ручной
возврат на референтную позицию.
4 Перед попыткой переместить вручную инструмент
одновременно вдоль наклонной и перпендикулярной
осей установите сигнал отключения управления
перпендикулярной/наклонной осью NOZAGC на 1.
ПРИМЕЧАНИЕ
1 Если задан угол наклона, близкий к 0° или ±90°,
возникает ошибка.(Следует использовать значения в
диапазоне от ±20°до ±90°).
2 Перед проверкой возврата на референтную позицию
по перпендикулярной оси (G27) необходимо
завершить операцию возврата на референтную
позицию по наклонной оси.
D Отображение
положения станка
III. РАБОТА

РАБОТА
B--63844RU/02
1. ОБЩИЕ СВЕДЕНИЯ
403
1
ОБЩИЕ СВЕДЕНИЯ
РАБОТА1. ОБЩИЕ СВЕДЕНИЯ
B--63844RU/02
404
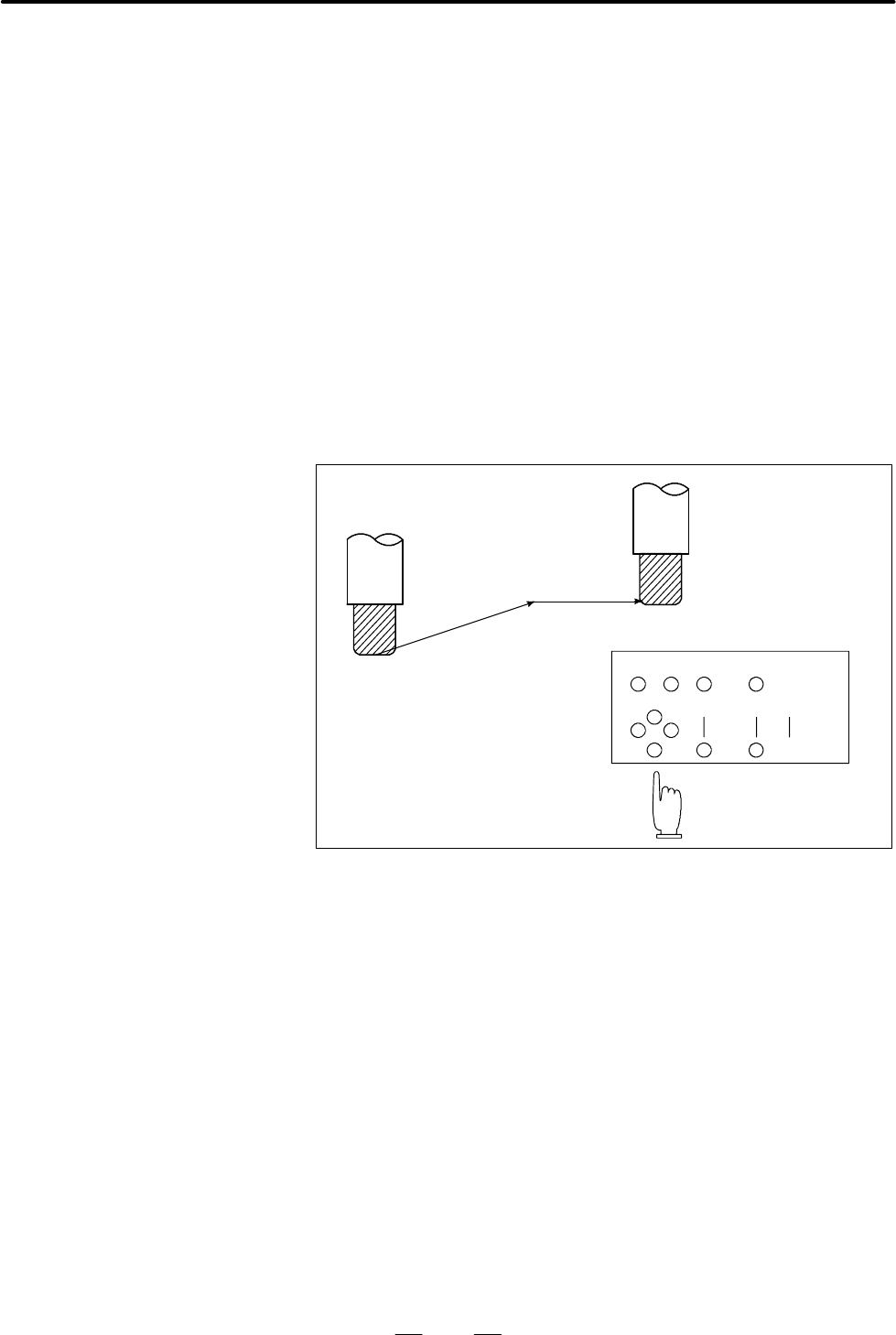
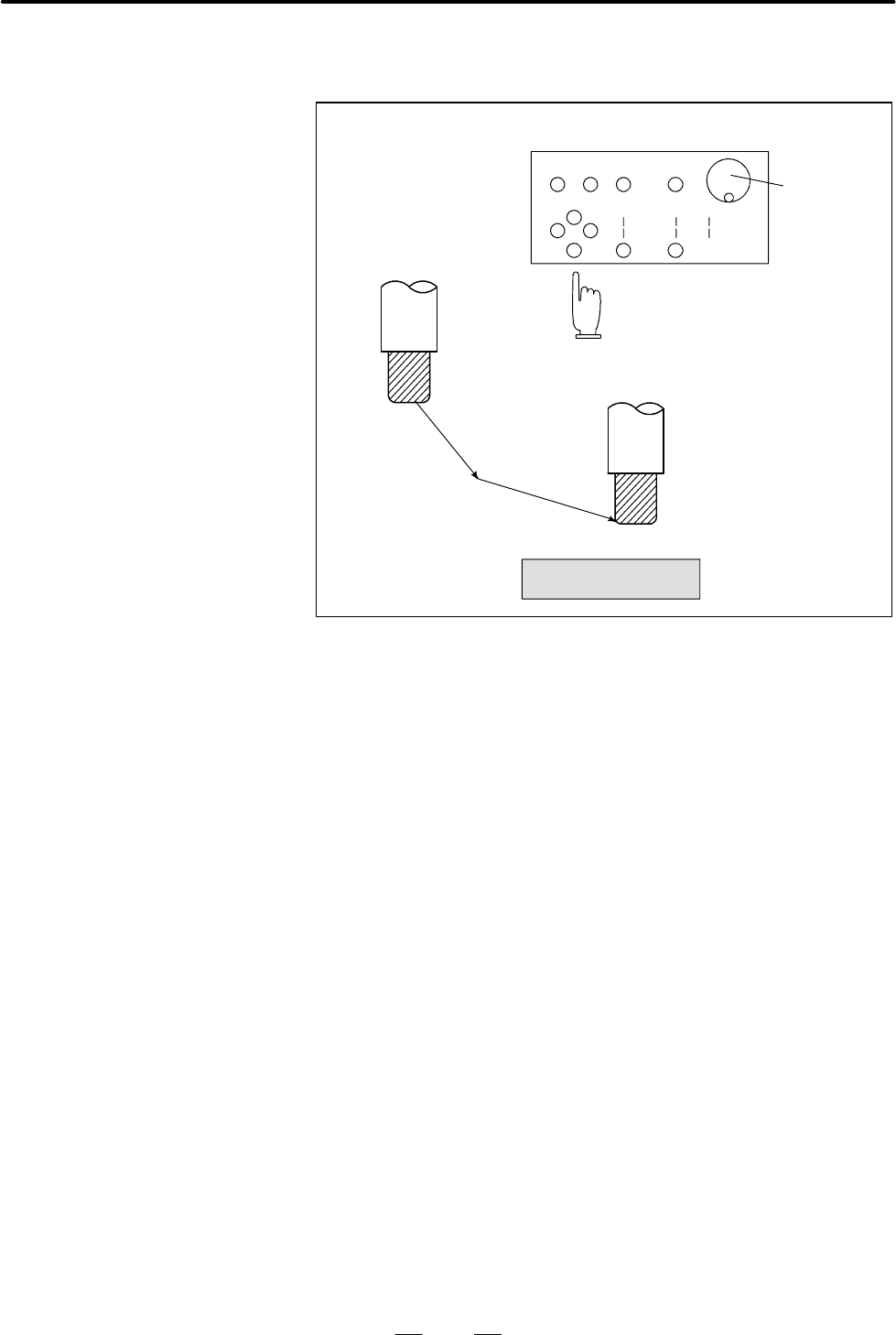
У инструмента станка с ЧПУ есть позиция, которая
используется для определения положения станка.
Это позиция называется референтной позицией и используется
для смены инструмента или установки координат. Обычно, при
включении питания инструмент перемещается в референтную
позицию.
Ручным возвратом в референтное положение называется
перемещение инструмента в референтное положение при
помощи переключателей и нажимных кнопок, расположенных
на пульте оператора.
Референтная
позиция
Инструмент
Пульт оператора станка
Рис.1.1(a)Ручной возврат инструмента в референтную позицию
Кроме этого, инструмент можно переместить в референтную
позицию с помощью команд.
Такая операция называется автоматическим возвратом в
референтную позицию (см. Раздел II-6).
1.1
РУЧНЫЕ ОПЕРАЦИИ
Пояснения
D Ручной возврат
инструмента в
референтное
положение
(см. раздел III- 3.1)
РАБОТА
B--63844RU/02
1. ОБЩИЕ СВЕДЕНИЯ
405
Можно перемещать инструмент по каждой оси с помощью
переключателей и кнопок на пульте оператора или рукоятки.
Инструмент
Заготовка
Пульт оператора станка
Ручной
генератор
импульсов
Рис.1.1(b)Перемещение инструмента вручную
Инструмент можно перемещать следующими способами:
(i) Ручная непрерывная подача (см. Раздел III-3.2)
Инструмент перемещается непрерывно, пока нажата
кнопка.
(ii) Подача с приращениями (смотрите раздел III-3.3)
Инструмент перемещается на заранее заданное расстояние
каждый раз, когда нажимается кнопка.
(iii) Ручная подача с помощью маховичка (смотрите раздел III-3.4)
При вращении маховичка инструмент перемещается на
расстояние, соответствующее градусу поворота маховичка.
D Перемещение
инструмента вручную
РАБОТА1. ОБЩИЕ СВЕДЕНИЯ
B--63844RU/02
406
Автоматический режим работы - это режим, когда станок
действует согласно созданной программе. Кнемуотносятся
работа по программе, внесенной с пульта MDI, работа по
программе, заложенной в память ЧПУ, атакжеработапо
внешней программе.(смотрите Раздел III-4).
Программа
Инструмент
01000 ;
M_S_T ;
G92_X_ ;
G00... ;
G01...... ;
.
.
.
.
Рис.1.2(a)Перемещение инструмента по заложенной программе
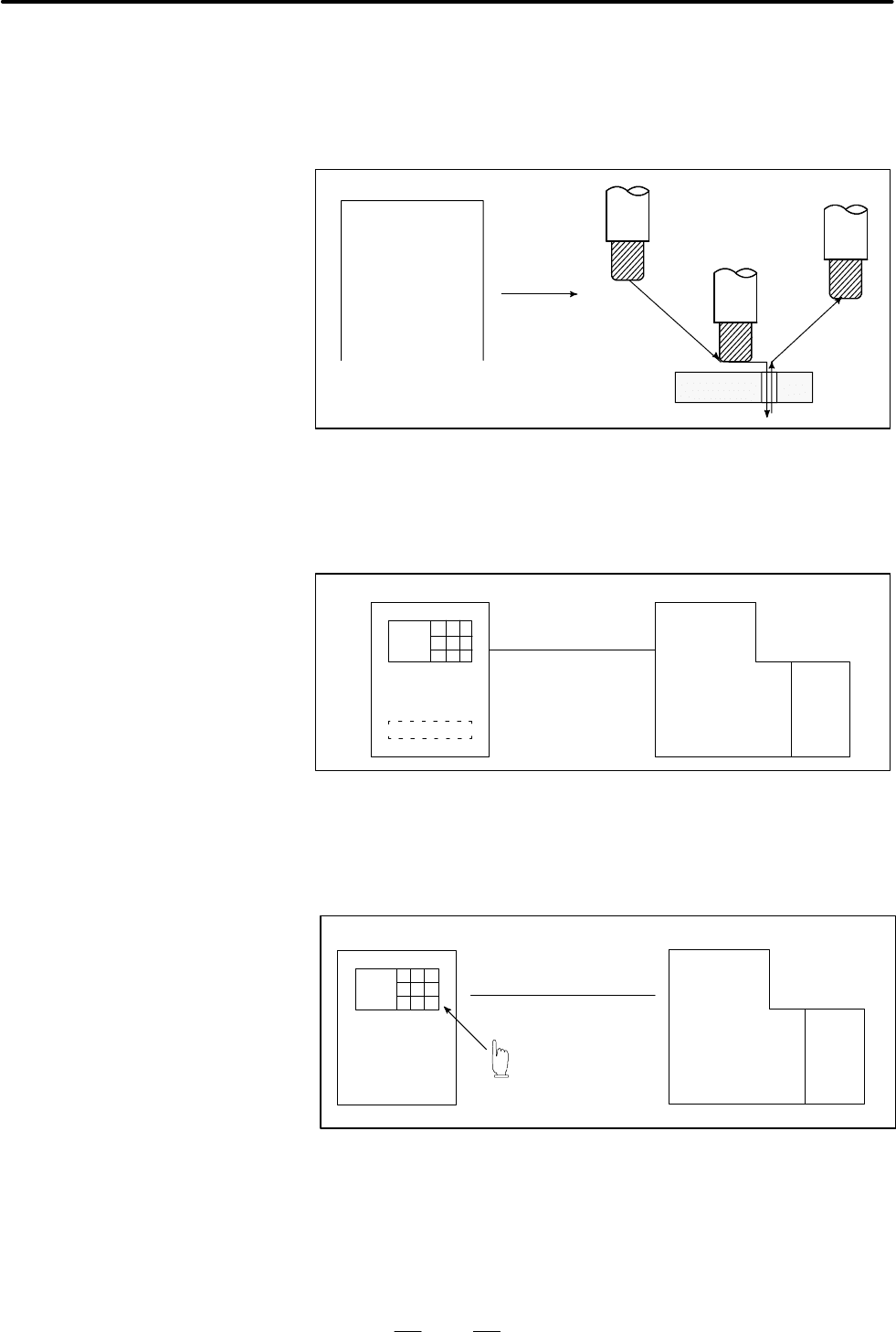
После того, как программа внесена в память ЧПУ, станок может
работатьпо командам программы. Такая работа носит название
работа по заложенной в память программе.
ЧПУ
Станок
Память
Рис.1.2(b)Работа по заложенной в память программе
После введения программы как группы команд с клавиатуры
ручного ввода данных, станок может работать по этой прог-
рамме. Такая работа называется работой программе, введенной
спультаMDI.
Клавиатура MDI
ЧПУ
Ручной ввод
программы
Станок
Рис.1.2(c)Работа по введенной с пульта MDI программе
В таком режиме работы программа не внесена в память ЧПУ.
Вместо этого она считывается с внешних устройств ввода / вы-
вода. Такая работа называется работой по внешней программе.
Этот режим удобен, когда управляющая программа слишком
велика для занесения в память ЧПУ.
1.2
ПЕРЕМЕЩЕНИЕ
ИНСТРУМЕНТА С
ПОМОЩЬЮ ПРОГРАМ-
МИРОВАНИЯ -
АВТОМАТИЧЕСКАЯ
РАБОТА
Пояснения
D Операция в памяти
D Операция ручного
ввода данных
D Работа по внешней
программе