Schneider P., Eberly D.H. Geometric Tools for Computer Graphics
Подождите немного. Документ загружается.

124 Chapter 4 Matrices, Vector Algebra, and Transformations
u
u
v
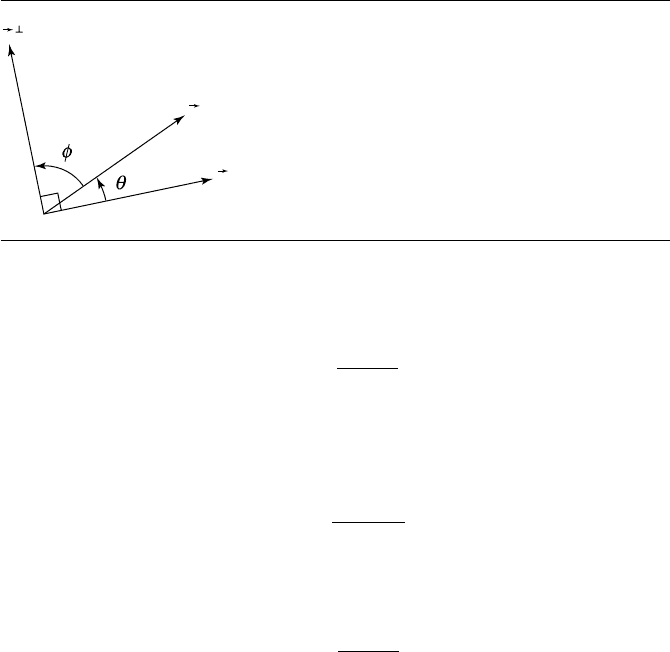
Figure 4.4 The perp dot product reflects the signed angle between vectors.
cos θ =
u ·v
uv
(4.9)
(see Section 3.3.1). So, if we consider the relationship between u
⊥
and v in terms of
the angle between them (as shown in Figure 4.4), we can see that
cos φ =
u
⊥
·v
u
⊥
v
As we proved earlier, u
⊥
=u, so the above can be rewritten as
cos φ =
u
⊥
·v
uv
(4.10)
or
u
⊥
·v =uvcos φ (4.11)
To carry this further, we note that if θ + φ =π/2, then sin θ =cos φ (we encour-
age you to break out your copy of your preferred symbolic math application program
to verify this). We can see directly from the figure that indeed θ + φ = π/2, and so
Equation 4.10 can be rewritten as
u
⊥
·v =uvsin θ
It may help if you suppose that the two vectors are normalized, in which case
ˆu
⊥
·ˆv =sin θ (4.12)
4.4 Products of Vectors 125
u
u
v
h
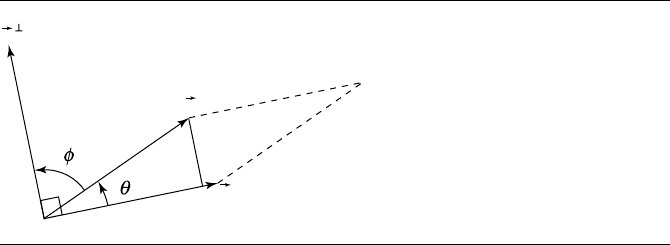
Figure 4.5 The perp dot product is related to the signed area of the triangle formed by two
vectors.
This makes it completely obvious that the perp dot product reflects not only the angle
between two vectors but the direction (that is, the sign) of the angle between them.
Contrast this with the relationship between the (usual) dot product of two vectors
and their angle, as shown in Equation 4.9, which indicates the angle between the
vectors, but fails to discriminate the orientation of the angle (i.e., the signed angle).
The second geometric property of the perp dot product can be seen by observing
Figure 4.5. By definition, sin θ = h/v, so the height of the parallelogram defined
by u and v is h =v sin θ. Its base is, of course, u,sowehave
Area =uv sin θ
Note that the right-hand side of this equation is the same as that of Equation 4.12,
from which we can conclude that the perp dot product of two vectors is equal to
twice the signed area of the triangle defined by the two vectors.
Recall from Section 3.3.1 that the cross product of two vectors (in 3-space) is
related to the area of the parallelogram, so we can now see, as Hill (1994) pointed out,
that the perp dot product can be viewed as the 2D analog of the 3D cross product.
Another way of arriving at this is to simply write out the perp dot product in
terms of its components:
u
⊥
·v =−u
y
v
x
+ u
x
v
y
= u
x
v
y
− u
y
v
x
=
u
x
u
y
v
x
v
y
If we consider u and v to be 3D vectors that are embedded in the z = 0 plane, then
the above can be seen to be exactly the triple scalar product (u ×v) · [
001
].
126 Chapter 4 Matrices, Vector Algebra, and Transformations
As shown in Equation 3.13 in Section 3.3.1, the triple scalar product is related to
the determinant formed by the three vectors as rows of a matrix, which defines the
volume of the parallelepiped. As the height in our case is 1, this is also related to the
area.
Properties
We conclude by enumerating and proving several properties of the perp dot product
where they differ from the usual dot product properties:
i. u
⊥
·v =−v
⊥
·u. The usual dot product rule is u ·v =v ·u.
ii. v
⊥
·v =0. The usual dot product rule is v ·v =v
2
.
iii. u
⊥
·v =uvsin θ. The usual dot product rule is u ·v =uv cos θ .
4.5 Matrix Representation of Affine
Transformations
In Section 2.1.1, we showed that a matrix multiplication can be interpreted in any
one of several fashions—as a change of coordinates, a transformation of a plane onto
itself, or as transformation from one plane to another. In Section 4.6 we discuss how,
in general, we can construct a matrix that performs a change-of-basis transforma-
tion. In this section, we discuss how to construct a matrix that performs an affine
transformation on points and vectors.
Suppose we have two affine spaces A and B, and with each we have arbitrarily
chosen frames F
A
(v
1
, v
2
, ..., v
n
, O
A
) and F
B
( w
1
, w
2
, ..., w
n
, O
B
), respectively.
If we have an arbitrarily chosen point P , we can describe its position in terms of
(v
1
, v
2
, ..., v
n
, O
A
) as [
a
1
a
2
... a
n
1
]. If we have an affine transformation T
that maps A to B, then we use the notation T
(
P
)
to refer to the point resulting from
applying that transformation to the point. This is all very abstract and coordinate-
free, but as we’re now discussing matrix representations (and hence coordinates),
we’d like to be able to find the coordinates of T
(
P
)
relative to
w
1
, w
2
, ..., w
n
, O
B
,
respectively.
We showed in Section 4.2 how to represent a point (or vector) in matrix terms,
so we can expand T
(
P
)
as
T
a
1
v
1
+ a
2
v
2
+···+a
n
v
n
+ O
A
(4.13)
We can invoke the property of preservation of affine combinations (Equation 3.14)
to rewrite Equation 4.13 as
a
1
T
v
1
+ a
2
T
v
2
+···+a
n
T
v
n
+ T
O
A
4.5 Matrix Representation of Affine Transformations 127
The entities T
v
i
are, of course, just more vectors, and T
O
A
is just a point
(because, by definition, affine transformations such as T mapvectorstovectors
and points to points). As such, they have a representation (i.e., coordinates)
c
1
, c
2
, ···, c
n
relative to
w
1
, w
2
, ..., w
n
, O
B
. We can then write
T
v
1
= c
1,1
w
1
+ c
1,2
w
2
+···+c
1,n
w
n
T
v
2
= c
2,1
w
1
+ c
2,2
w
2
+···+c
2,n
w
n
.
.
.
T
v
n
= c
n,1
w
1
+ c
n,2
w
2
+···+c
n,n
w
n
T
O
A
= c
n+1,1
w
1
+ c
n+1,2
w
2
+···+c
n+1,n
w
n
+ O
B
With all of this in place, we can now simply construct the matrix T, which
represents the transform T : A −→ B:
T
(
P
)
=
[
a
1
a
2
··· a
n
1
]
T
v
1
T
v
2
.
.
.
T
v
n
T
O
A
=
[
a
1
a
2
··· a
n
1
]
c
1,1
w
1
+ c
1,2
w
2
+···+c
1,n
w
n
c
2,1
w
1
+ c
2,2
w
2
+···+c
2,n
w
n
.
.
.
c
n,1
w
1
+ c
n,2
w
2
+···+c
n,n
w
n
c
n+1,1
w
1
+ c
n+1,2
w
2
+···+c
n+1,n
w
n
+ O
B
=
[
a
1
a
2
··· a
n
1
]
c
1,1
c
1,2
··· c
1,n
0
c
2,1
c
2,2
··· c
2,n
0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
c
n,1
c
n,2
··· c
n,n
0
c
n+1,1
c
n+1,2
··· c
n+1,n
1
w
1
w
2
.
.
.
w
n
O
B
(4.14)
Of course, the rightmost matrix of the last line in Equation 4.14 is simply the frame
for B, and
128 Chapter 4 Matrices, Vector Algebra, and Transformations
[
a
1
a
2
··· a
n
1
]
c
1,1
c
1,2
··· c
1,n
0
c
2,1
c
2,2
··· c
2,n
0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
c
n,1
c
n,2
··· c
n,n
0
c
n+1,1
c
n+1,2
··· c
n+1,n
1
=
[
a
1
a
2
··· a
n
1
]
T (4.15)
is, by the definition of matrix multiplication (see Section 2.3.4), simply a point. Taken
together, the matrix product defines a point in B, which is T(P), whose coordinates
are the elements of the row matrix resulting from multiplying the matrices in Equa-
tion 4.15. We call that (n + 1) × (n + 1) matrix T the matrix representation of the
transformation T .
Notice that the first n rows of T are simply the transformed basis vectors of A,
and the last row is the transformed origin. At the end of Section 3.4, we showed
that an affine transformation is completely determined by its operation on n basis
vectors; the observation that the matrix representing a transformation is defined by
the transformation of the coordinates of the basis vectors’ matrix representations is
simply the matrix manifestation of this fact.
4.6 Change-of-Basis/Frame/Coordinate System
As discussed in Section 3.2.5, a point or vector may be represented in different frames
of reference. Put another way, if we have a fixed point in some space, we can choose
any arbitrary frame and determine the coordinates of that point relative to the frame
uniquely. Recall that the computations for this looked rather cumbersome. We now
show how matrices can be conveniently employed in change-of-basis transforma-
tions. Further, by looking at the construction of such matrices from a vector algebra
perspective, the matrix construction is intuitive as well.
In the previous section we showed that a point P =(a
1
, a
2
, ..., a
n
,1) can be rep-
resented in relation to affine frame F
A
=(v
1
, v
2
, ..., v
n
, O
A
)
T
using matrices. If we
have another frame F
G
= ( w
1
, w
2
, ..., w
n
, O
G
)
T
, how do we compute the coordi-
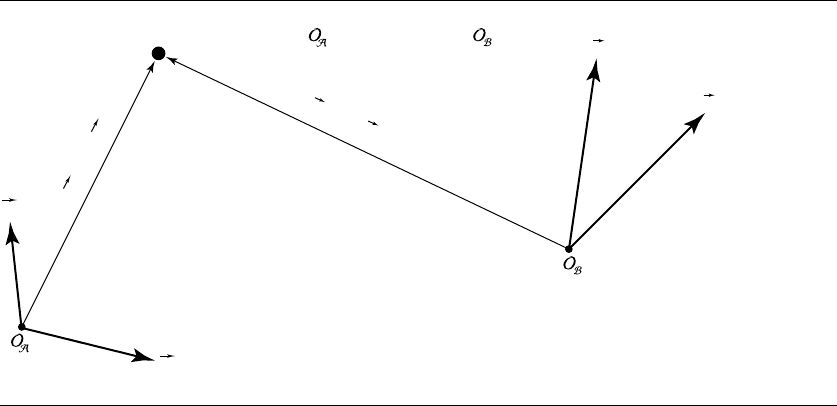
nates of P relative to these basis vectors and origin? (See Figure 4.6.) In Section 3.2.5,
we showed how this works, and we now show the process in terms of matrices.
The previous section showed the way we use matrices to express a point as the
multiplication of a row matrix (consisting of its coordinates) by an (n +1) ×n matrix
(consisting of the basis vectors and origin of the frame). If, then, we have another set
of basis vectors and origin for another frame, the problem consists of computing the
row matrix for P ’s coordinates:
4.6 Change-of-Basis/Frame/Coordinate System 129
v
2
v
1
P = a
1
v
1
+ a
2
v
2
+ = b
1
w
1
+ b
2
w
2
+
a
1
v
1
+ a
2
v
2
b
1
w
1
+ b
2
w
2
w
2
w
1
Figure 4.6 Representing P in A and B.
P =
[
a
1
a
2
··· a
n
1
]
v
1
v
2
.
.
.
v
n
O
A
=
[
b
1
b
2
··· b
n
1
]
w
1
w
2
.
.
.
w
n
O
B
(4.16)
which, if we expand the matrix on each side of the equation, yields
[
a
1
a
2
··· a
n
1
]
v
1,1
v
1,2
··· v
1,n
0
v
2,1
v
2,2
··· v
2,n
0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
v
n,1
v
n,2
··· v
n,n
0
O
A,1
O
A,2
··· O
A,n
1
=
[
b
1
b
2
··· b
n
1
]
w
1,1
w
1,2
··· w
1,n
0
w
2,1
w
2,2
··· w
2,n
0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
w
n,1
w
n,2
··· w
n,n
0
O
B,1
O
B,2
··· O
B,n
1
(4.17)
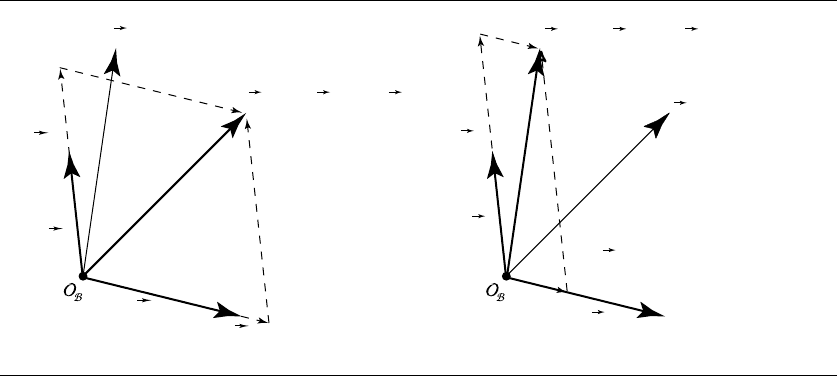
130 Chapter 4 Matrices, Vector Algebra, and Transformations
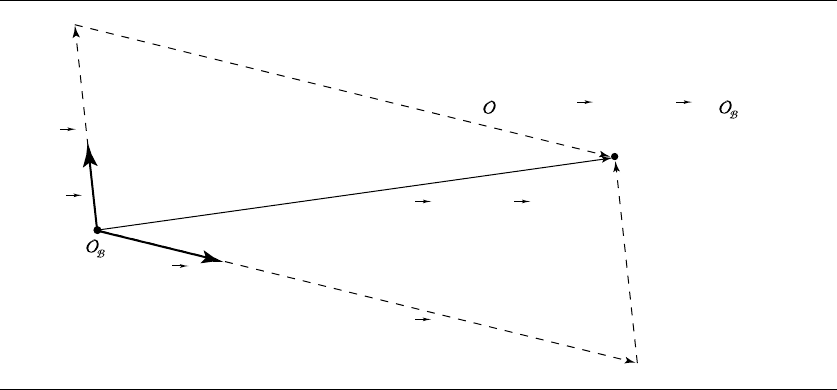
c
n + 1, 2
w
2
c
n + 1, 1
w
1
c
n + 1, 1
w
1
+ c
n + 1, 2
w
2
= c
n + 1, 1
w
1
+ c
n + 2, 2
w
2
+
w
2
w
1
Figure 4.7 Representing O in G.
In Section 3.2.3, we showed how any point (vector) can be represented as a unique
affine combination of basis vectors. Well, we can apply this principle to the vectors
v
1
, v
2
, ..., v
n
and the point O
A
:
v
1
= c
1,1
w
1
+ c
1,2
w
2
+···+c
1,n
w
n
(4.18)
v
2
= c
2,1
w
1
+ c
2,2
w
2
+···+c
2,n
w
n
(4.19)
.
.
.
v
n
= c
n,1
w
1
+ c
n,2
w
2
+···+c
n,n
w
n
(4.20)
O
A
= c
n+1,1
w
1
+ c
n+1,2
w
2
+···+c
n+1,n
w
n
+ 1 · O
B
(4.21)
In other words, the c
i
are the coordinates of the v
i
and O
A
, relative to the affine frame
w
1
, w
2
, ..., w
n
, O
B
(see Figures 4.7 and 4.8, respectively). In terms of the matrix
representation, we can show this as well; we start off by noting that we can write
the right-hand sides of Equations 4.18 through 4.20 and Equation 4.21 in matrix
form:
4.6 Change-of-Basis/Frame/Coordinate System 131
c
1, 2
w
2
c
1, 1
w
1
v
2
w
2
w
1
v
1
= c
1, 1
w
1
+ c
1,
2
w
2
v
2
= c
2, 1
w
1
+ c
2,
2
w
2
c
2, 1
w
1
v
1
w
2
c
2, 2
w
2
w
1
Figure 4.8 Representing v
i
in B.
c
1,1
w
1
+ c
1,2
w
2
+···+c
1,n
w
n
c
2,1
w
1
+ c
2,2
w
2
+···+c
2,n
w
n
.
.
.
c
n,1
w
1
+ c
n,2
w
2
+···+c
n,n
w
n
c
n+1,1
w
1
+ c
n+1,2
w
2
+···+c
n+1,n
w
n
+ O
B
(4.22)
If we refer back to the definition of matrix multiplication (Section 2.3.4), we see we
could rewrite Equation 4.22 as two separate matrices:
c
1,1
w
1
+ c
1,2
w
2
+···+c
1,n
w
n
c
2,1
w
1
+ c
2,2
w
2
+···+c
2,n
w
n
.
.
.
c
n,1
w
1
+ c
n,2
w
2
+···+c
n,n
w
n
c
n+1,1
w
1
+ c
n+1,2
w
2
+···+c
n+1,n
w
n
+ O
B
(4.23)
=
c
1,1
c
1,2
··· c
1,n
0
c
2,1
c
2,2
··· c
2,n
0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
c
n,1
c
n,2
··· c
n,n
0
c
n+1,1
c
n+1,2
··· c
n+1,n
1
w
1,1
w
1,2
··· w
1,n
0
w
2,1
w
2,2
··· w
2,n
0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
w
n,1
w
n,2
··· w
n,n
0
O
B,1
O
B,2
··· O
B,1
1
132 Chapter 4 Matrices, Vector Algebra, and Transformations
This allows us to rewrite Equation 4.16 as
[
a
1
a
2
··· a
n
1
]
c
1,1
c
1,2
··· c
1,n
0
c
2,1
c
2,2
··· c
2,n
0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
c
n,1
c
n,2
··· c
n,n
0
c
n+1,1
c
n+1,2
··· c
n+1,n
1
w
1,1
w
1,2
··· w
1,n
0
w
2,1
w
2,2
··· w
2,n
0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
w
n,1
w
n,2
··· w
n,n
0
O
B,1
O
B,2
··· O
B,n
1
=
[
b
1
b
2
··· b
n
1
]
w
1,1
w
1,2
··· w
1,n
0
w
2,1
w
2,2
··· w
2,n
0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
w
n,1
w
n,2
··· w
n,n
0
O
B,1
O
B,2
··· O
B,n
1
(4.24)
which, if we factor out the matrix common to both sides of the equation, yields
[
a
1
a
2
··· a
n
1
]
c
1,1
c
1,2
··· c
1,n
0
c
2,1
c
2,2
··· c
2,n
0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
c
n,1
c
n,2
··· c
n,n
0
c
n+1,1
c
n+1,2
··· c
n+1,n
1
=
[
b
1
b
2
··· b
n
1
]
4.7 Vector Geometry of Affine Transformations
The preceding section showed that we can construct the matrix T for a transforma-
tion T by simply “stacking up” the row matrices representing the transformed basis
vectors and origin. This is all very interesting and elegant, but in practical terms we
must now ask how we do this for each of the fundamental types of affine transforms.
The subsequent sections describe each of these in vector algebra (coordinate-free)
fashion, along with how this translates (so to speak) to a matrix representation. All
we have to do, essentially, is to figure out what the matrix does to the origin and to
the basis vectors of the affine space (actually, any linearly independent set of vectors,
and any point will do, of course).
4.7 Vector Geometry of Affine Transformations 133
For the simpler transformations, this sort of constructive approach yields a ma-
trix that looks just like the ones given in more conventional treatments (i.e., trans-
lation and uniform scale). The other transformations will appear different because
we’ll be treating them in a more general, vector-algebra-based fashion. For example,
the conventional approach to rotation shows how you construct a matrix that ro-
tates about a basis vector (“coordinate axis”), and then how you can construct, and
then concatenate, a number of such matrices in order to implement a transforma-
tion about an arbitrary axis. In our treatment, we show how to construct the general
rotation matrix directly. To see how the conventional matrices are really just sim-
ple subsets of the general approach, we show what our approach produces for these
restricted subsets; for example, our rotation matrix rotates about an arbitrary axis,
and we show how this leads to a conventional matrix construction if we restrict the
rotation axis to one of the coordinate axes.
4.7.1 Notation
We’re going to be covering the construction of matrices for affine transformations,
using vector algebra methods. In doing so, we’ll find it convenient to employ a nota-
tional convention for matrices’ contents in a more “schematic” fashion. You should
understand by now that an (n + 1) ×(n + 1) affine matrix T can be conceptually
broken up into three parts:
1. The n × n upper left-hand submatrix A
2. The (n +1) ×1 right-hand column, which is always of the form [
00··· 1
]
T
3. The 1 × n bottom row, which is always of the form
b = [
b
1
b
2
··· b
n
]
This compartmentalization will be depicted as
T =
a
1,1
a
1,2
··· a
1,n
0
a
2,1
a
2,2
··· a
2,n
0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
a
n,1
a
n,2
··· a
n,n
0
b
1
b
2
··· b
n
1
=
A
0
T
b 1
and is typically called a block matrix.