Schneider P., Eberly D.H. Geometric Tools for Computer Graphics
Подождите немного. Документ загружается.

104 Chapter 3 Vector Algebra
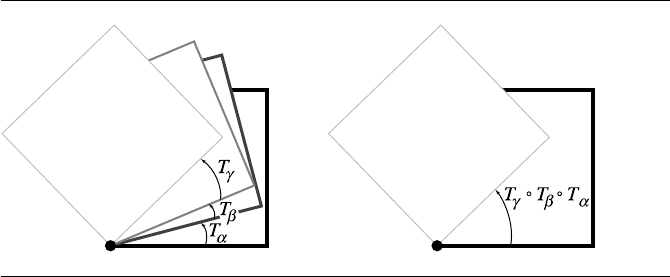
Figure 3.40 Composition of affine maps (rotation).
3.5 Barycentric Coordinates and Simplexes
We saw that the coordinates of points in an affine space can be defined in terms of the
basis vectors of the underlying vector space, relative to the point O of F:
Q =u + O
= a
1
v
1
+ a
2
v
2
+···+a
n
v
n
+ O
An alternative is to use what we might call “basis points”: P
0
=O, P
1
=O +v
1
, P
2
=
O +v
2
, ..., P
n
= O +v
n
(that is, a set of points consisting of O and the points
generated by adding the basis vectors to O).
We can then represent a point Q ∈ A,relativetoF as
Q = P
0
1 − a
1
− a
2
−···−a
n
+ P
1
a
1
+ P
2
a
2
+···+P
n
a
n
or
Q = P
0
a
0
+ P
1
a
1
+···+P
n
a
n
where a
0
is defined by
1 = a
0
+ a
1
+···+a
n
This last identity is particularly important—the coefficients sum to 1.
This should be recognizable as an affine combination, and the values a
0
,
a
1
, ..., a
n
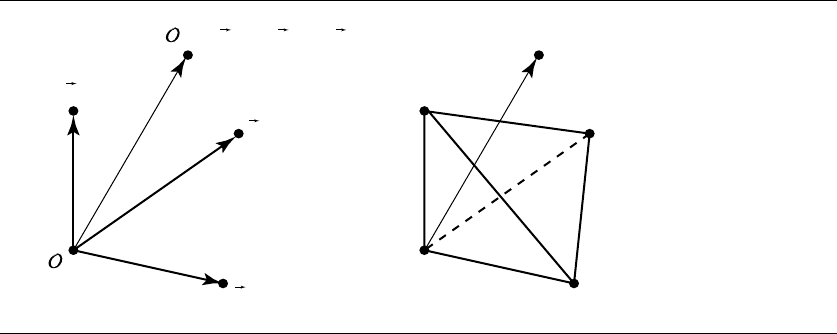
are called the barycentric coordinates of Q with respect to F. Figure 3.41
shows both the standard frame coordinates and the barycentric coordinates.
3.5 Barycentric Coordinates and Simplexes 105
v
1
v
2
v
3
P
1
P
2
P
3
P
0
Q = a
0
P
0
+ a
1
P
1
+ a
2
P
2
+ a
3
P
3
Q = + a
1
v
1
+ a
2
v
2
+ a
3
v
3
(a) (b)
Figure 3.41 Affine (a) and barycentric (b) coordinates.
You might expect, due to the fundamental relationship between points and vec-
tors in an affine space, that vectors themselves can also be represented using barycen-
tric coordinates; this is indeed the case. Recall that we can write any vector as
u = a
1
v
1
+ a
2
v
2
+···+a
n
v
n
If we let a
0
=−
a
1
+ a
2
+···+a
n
, then we can rewrite the vector as
u = a
0
P
0
+ a
1
P
1
+···+a
n
P
n
Note that
a
0
+ a
1
+···+a
n
=−
a
1
+ a
2
+···+a
n
+ a
1
+ a
2
+···+a
n
= 0
That is, the coefficients sum to 0, not 1 as we have for points. The “basis points” are
generallyreferredtoasasimplex, just as the distinguished point plus basis vectors are
called a frame.
An affine map’s preservation of relative ratios applies to barycentric coordinates
for higher-order simplexes as well as to lines (see Section 3.4). Let’s take this reasoning
a step further. A basis point K of a simplex is simply that point for which the barycen-
tric coordinates are of the form
a
0
= 0, a
1
= 0, ..., a
k
= 1, ..., a
n
= 0
. So, if the
basis points are transformed, we get another set of basis points defining another sim-
plex, affine combinations of which are equivalent to points to which the affine map
has been applied. So, an affine map can be completely and uniquely described by its
operation on a simplex. However, it turns out that an affine map is even more general
106 Chapter 3 Vector Algebra
than that. It may transform an n-simplex into a set of n points that is not a simplex;
this is what happens when the map is a projection.
3.5.1 Barycentric Coordinates and Subspaces
Just as we can have subspaces of linear (vector) spaces, so too can we have affine sub-
spaces, and barycentric coordinates can be discussed in terms of these. Suppose we
have an n-dimensional affine space A as defined by a simplex S =
P
0
, P
1
, ..., P
n
.
We can then define an m-dimensional subspace B ⊂ A, as specified by a simplex
T =
Q
0
, Q
1
, ..., Q
m
. Any point R ∈B can be represented as
R = b
0
Q
0
+ b
1
Q
1
+···+b
m
Q
m
with the usual definition of 1 = b
0
+ b
1
+···+b
m
. Of course, since the Q
i
are
representable in terms of A, we could rewrite R in terms of B.
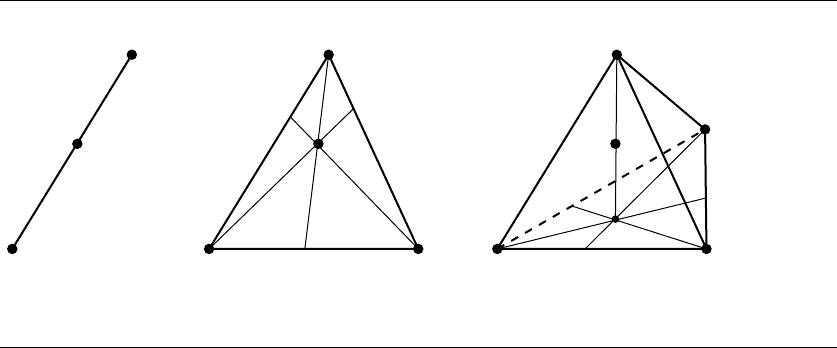
Each n-simplex is composed of n + 1 points, so a 1-simplex is a line segment, a
2-simplex is a triangle (defining a plane), and a 3-simplex is a tetrahedron (defin-
ing a volume), as shown in Figure 3.42. This figure also illustrates the relationship
between barycentric and frame coordinates. Consider the 2-simplex in the middle
of the figure: the point R can be defined as described above in terms of barycentric
coordinates; however, emanating from Q
0
is a line segment that intersects the oppo-
site side of the simplex at a point c
Q
2
− Q
1
(and similarly for the other two basis
points), and we can consider any of the Q
i
to be O and the vectors from that point
to its two neighbors as defining an affine frame. It’s particularly interesting to note
that any two of these interior, intersecting line segments are sufficient to determine
R. This also suggests that only two of the simplicial coefficients are sufficient to spec-
ify a point; the reason this “works” is due to the fact that these coefficients sum to 1,
and so if we know two coefficients, the third value is implied.
3.5.2 Affine Independence
For an affine frame, the basis vectors must be linearly independent. Considering that
an affine frame or simplex can be used to define an affine space, it’s logical to assume
there’s an analogous independence criterion for simplexes.
Recall that linear independence of vectors means that none of them are parallel.
Intuitively, the analogous characteristic for basis points is that none of them are
coincident, and that no more than two are collinear. That is, none are an affine
combination of the others. Formally, we can say that a set of basis points are affinely
independent if their simplicial coordinates are linearly independent (in the same way
that vectors in a vector space are linearly independent).
Let P
0
, P
1
, ..., P
n
be the n + 1 points defining an n-simplex, and v
i
= P
i
− P
0
(recall that we’re using the convention that P
0
=O). If the n vectors v
1
, v
2
, ..., v
n
are
linearly independent, then the points P
0
, P
1
, ..., P
n
are affinely independent. This
3.5 Barycentric Coordinates and Simplexes 107
Q
0
Q
1
R
(a)
Q
2
Q
0
Q
1
R
(b)
Q
3
Q
0
Q
1
Q
2
R
(c)
Figure 3.42 The first three simplexes: a line (a), a triangle (b), and a tetrahedron (c).
can be observed by looking at Figure 3.42: the two points defining the 1-simplex can-
not be coincident; the three points defining the 2-simplex cannot be all collinear; the
four points defining the 3-simplex cannot be all coplanar. Note that if we “degen-
erate” any of these simplexes in that way, we get a space whose dimension is 1 less,
which corresponds to the “next smallest” simplex.
Chapter
4Matrices, Vector
Algebra, and
Transformations
4.1 Introduction
The point of the preceding chapter was to introduce the concepts and principles
of geometry in a coordinate-free fashion. For example, most treatments of the dot
product simply describe it in terms of how you perform arithmetic on row and
column matrices, without providing much in the way of an intuitive understanding
or justification, whereas our approach was purely geometrical.
DeRose (1989,1992) and Goldman (1985, 1987) strongly advocate this
coordinate-free approach. DeRose describes a coordinate-free API, and an imple-
mentation is available. Such an approach has much to recommend it, especially in
contrast to the more usual scheme of requiring programmers to explicitly multiply
matrices, invert them, generally keep track of “what space they’re in,” and perform
all operations on coordinates.
On the other hand, the reality is that most graphics software is not so constructed,
and the programmer needs to deal with matrices and operations on them; further,
even a coordinate-free library would likely involve matrices in its implementation.
The goal of this chapter is to bring together the concepts and techniques intro-
duced in the previous chapter and the matrices introduced in the chapter before
that.
In Chapter 2 we covered matrices as a rather abstract tool, rather divorced from
their relationship to the vector algebra described in Chapter 3. However, we’ve
109
110 Chapter 4 Matrices, Vector Algebra, and Transformations
dropped a few clues along the way, such as our calling 1 × n matrices“rowvectors,”
or discussing coordinates in the context of affine transformations; readers who have
been taught about transformations, spaces, and matrices would have seen this as
rather obvious, and readers for whom this sort of presentation of the topics is new
were probably making the connections as well.
Now, we bring together all these concepts and show explicitly how matrices are
used to represent points, vectors, and transformations, but from the point of view
of the “vector algebra” approach. This differs from the more typical treatment as
found, for example, in Rogers and Adams (1990) or Newman and Sproull (1979),
which generally start off by describing points and vectors in terms of x-, y-, and
z-coordinates, dot products as unintuitive and seemingly arbitrary operations on
the coordinates, and transformations as multiplications of magically constructed
matrices multiplied by the coordinates of a point or vector.
4.2 Matrix Representation of Points and
Vectors
In Section 3.3.3, we showed that an affine frame F can be represented as a set of basis
vectors and an origin
F =
v
1
, v
2
, ..., v
n
, O
T
that any u ∈ V ,whereV is a vector space, can be written as
u = a
1
v
1
+ a
2
v
2
+···+a
n
v
n
(4.1)
and that any point P ∈ P (the set of points related to the associated vector space for
the frame) can be expressed as
P = a
1
v
1
+ a
2
v
2
+···+a
n
v
n
+ O (4.2)
Recall that the Coordinate Axiom defined in Section 3.3 says that a point mul-
tiplied by 0 yields the zero vector, so we can write 0 · O =
0. If we also recall the
definition of tuple multiplication (Section 2.3.4) and the matrix notation associated
with it, we can rewrite Equation 4.1 in matrix notation:
4.2 Matrix Representation of Points and Vectors 111
u = a
1
v
1
+ a
2
v
2
+···+a
n
v
n
= a
1
v
1
+ a
2
v
2
+···+a
n
v
n
+ (0 ·O)
=
[
a
1
a
2
... a
n
0
][
v
1
v
2
... v
n
O
]
T
=
[
a
1
a
2
··· a
n
0
]
v
1
v
2
.
.
.
v
n
O
=
[
a
1
a
2
··· a
n
0
]
v
1,1
v
1,2
··· v
1,n
v
2,1
v
2,2
··· v
2,n
.
.
.
.
.
.
.
.
.
.
.
.
v
n,1
v
n,2
··· v
n,n
O
1
O
2
··· O
n
(4.3)
So, we can represent a vector as a row matrix whose first n elements are the coeffi-
cients of the affine coordinates and whose last element is 0. If the affine frame is clear
from context, we will use the shorthand notation u = [
a
1
a
2
··· a
n
0
]. Be
aware that this notation is for convenience in identifying a vector u and its representa-
tion in the frame, but the equality is really in the sense of that shown in Equation 4.3.
We can apply the same argument for points. Again invoking the Coordinate
Axiom, we can rewrite Equation 4.2 in matrix notation:
P = a
1
v
1
+ a
2
v
2
+···+a
n
v
n
+ O
= a
1
v
1
+ a
2
v
2
+···+a
n
v
n
+ (1 · O)
=
[
a
1
a
2
... a
n
1
][
v
1
v
2
... v
n
O
]
T
=
[
a
1
a
2
··· a
n
1
]
v
1
v
2
.
.
.
v
n
O
=
[
a
1
a
2
··· a
n
1
]
v
1,1
v
1,2
··· v
1,n
v
2,1
v
2,2
··· v
2,n
.
.
.
.
.
.
.
.
.
.
.
.
v
n,1
v
n,2
··· v
n,n
O
1
O
2
··· O
n
(4.4)
112 Chapter 4 Matrices, Vector Algebra, and Transformations
So, we can represent a point as a row matrix whose first n elements are the coefficients
of the affine coordinates and whose last element is 1. If the affine frame is clear from
context, we will use the shorthand notation P = [
a
1
a
2
··· a
n
1
]. Be aware
that this notation is for convenience in identifying a point P and its representation
in the frame, but the equality is really in the sense of that shown in Equation 4.4.
Of course, the basis vectors and origin for an affine frame F are no different than
any other vectors and points in an affine space, and so we can rewrite the matrix
representing them as
v
1,1
v
1,2
··· v
1,n
0
v
2,1
v
2,2
··· v
2,n
0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
v
n,1
v
n,2
··· v
n,n
0
O
1
O
2
··· O
n
1
(4.5)
which is, as you can see, a square (n + 1) × (n + 1) matrix. This will come in handy,
as you’ll see in the subsequent discussions.
Readers who have had any sort of experience programming two- or three-
dimensional graphics applications may well be objecting at this point that you typ-
ically use only the coordinates to represent a point or vector. A bit of explanation
is in order: Typically, representations of individual objects and entire scenes are im-
plemented as some sort of hierarchy. Parts of, say, a car are grouped, and each part
consists of subparts, and so on. Subparts are often defined in their own “local” frame,
which is then transformed into the space of its “parent,” which itself is transformed
into the space of its parent, and so on upward in the hierarchy toward the root, which
isgenerallydefinedtobein“worldspace.”
At each level, there is a local frame. This frame has as its origin the point
[
001
]or [
0001
], depending on whether it’s a two-dimensional or three-
dimensional system, respectively. Further, the frame has as its set of basis vectors what
isreferredtoastheusual basis (or more formally, the standard Euclidean basis). The
basis is orthonormal, follows the right-hand rule, and is ordered as follows: vector v
i
hasa1intheith position and 0 elsewhere. Conventionally, these are called the x-, y-
, and z-axes, respectively. The coefficients of a point or vector—its coordinates—are
also referred to as the x-, y-, and z-components, respectively. Thus, the matrix seen
in Equation 4.5 is, in a three-dimensional system,
1000
0100
0010
0001
4.3 Addition, Subtraction, and Multiplication 113
and similarly for two-dimensional systems. Obviously, these are just identity matri-
ces, and so we can write the last line of Equation 4.4 as simply
P =
[
a
1
a
2
··· a
n
1
]
It was shown in Section 2.9.2 that we can construct an orthonormal basis from
any other (linearly independent) basis; thus, we can conventionally use these usual
bases for all local frames (“coordinate systems”), with no loss of representational
power. The usual bases have obvious advantages in terms of intuitive appeal and
computation. The rest of this chapter assumes the use of usual bases.
4.3 Addition, Subtraction, and Multiplication
In Section 4.2, we showed how points and vectors were represented in matrix form.
Here, we show formally how addition, subtraction, and scalar multiplication of
points and/or vectors are defined in terms of their coordinate/matrix representation.
In all our previous discussions of affine spaces, we’ve been (intentionally) quite
general: basis vectors have been given names like u, v, and so on, and their coor-
dinates been given names like a
1
, a
2
, and so on. By convention, in two- and three-
dimensional space, the basis vectors are generally referred to as the x-, y-, and z-axes,
and the coordinates are generally referred to directly as the x-, y-, and z coordinates.
However, to avoid confusion in the following sections, we’re going to refer to the ba-
sis vectors using a convention, often observed in calculus texts, which calls the basis
vectors i, j , and k. We’ll call the origin O as before (Figures 4.1 and 4.2 show this
notation).
4.3.1 Vector Addition and Subtraction
Suppose we have two vectors u = u
1
ı +u
2
+ u
3
k and v =v
1
ı +v
2
+ v
3
k, and we
wish to add or subtract them in their matrix representations:
u +v =
[
u
1
u
2
u
3
0
]
+
[
v
1
v
2
v
3
0
]
= u
1
ı +u
2
+ u
3
k + v
1
ı +v
2
+ v
3
k
= (u
1
+ v
1
)ı + (u
2
+ v
2
) + (u
3
+ v
3
)
k
=
[
u
1
+ v
1
u
2
+ v
2
u
3
+ v
3
0
]
The proof for subtraction is analogous.