Удут Л.С., Кояин Н.В., Мальцева О.П. Проектирование и исследование автоматизированных электроприводов. Часть 1. Введение в технику регулирования линейных систем Часть 2. Оптимизация контура регулирования
Подождите немного. Документ загружается.

входного воздействия
x
амплитуда выходного импульса равна
бесконечности, а площадь импульса
дд
TxS
.
2. Дифференцирующее (инерционное) реальное звено
Дифференциальное уравнение и передаточная функция звена
приведены в табл. 1.1 (п. 10). Переходная функция звена при единичном
входном воздействии имеет вид
T
t
T
T
th
e)(
д
. (1.59)
Амплитудно-фазовая характеристика звена
Tj
jT
jW
1
)(
д
, (1.60)
тогда
22
д
22
д
1lg20lg20
1
lg20)( TT
T
T
L
,
T
arctg
2
)(
. (1.61)
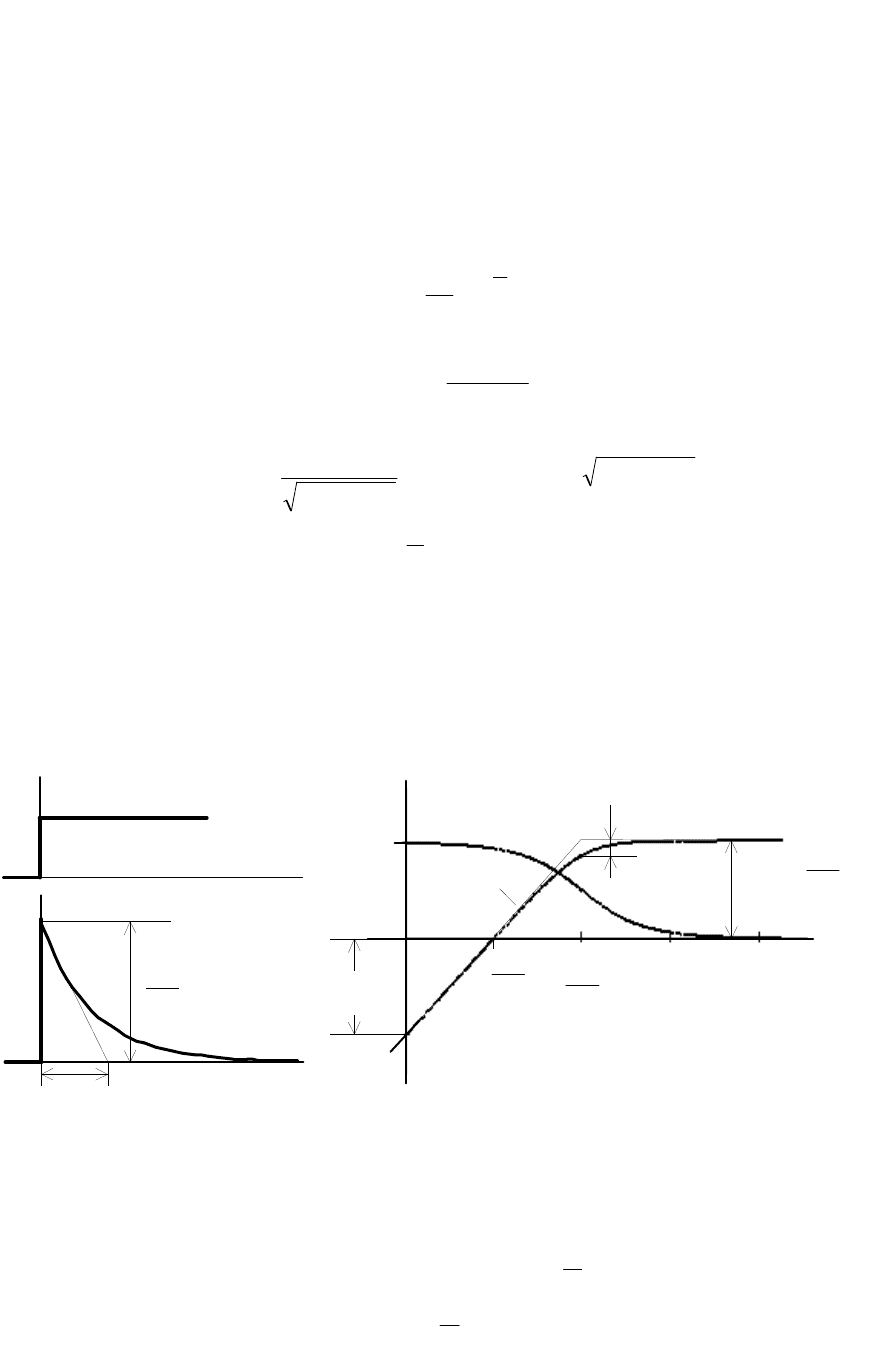
Временные и логарифмические частотные характеристики звена
приведены на рис. 1.16. Соотношение постоянных времени
д
T
и T в общем
случае может быть любым, для дифференцирующих звеньев характерно
TT
д
. Дифференцирующее инерционное звено можно рассматривать как
последовательное включение двух звеньев: апериодического с постоянной
времени T и идеального дифференцирующего с постоянной времени
д
T
.
t
t
L
( ) L( )
+20 дБ/дек
lg
1
T
1
T
1
T
д
x
y
дБ
град
90
0
3 дБ
20lg
T
T
д
45
0
0
1
а
б
20lg T
д
T
T
д
1 3 4
1000
10000
, с
-1
Рис. 1.16. Временные (а) и частотные (б) характеристики
дифференцирующего инерционного звена
Асимптотическая прямая с наклоном +20 дБ/дек строится в
соответствии с выражением
д
lg20)( TL
при
T
1
,
ошибка в точке сопряжения при
T
1
равна 3 дБ.
31
3. Дифференцирующее идеальное звено первого порядка
Дифференциальное уравнение и передаточная функция звена
приведены в табл. 1.1 (п. 6). Переходная функция звена при единичном
входном воздействии имеет вид
ktTktTkth )()()(
д
. (1.62)
Амплитудно-фазовая характеристика звена
TjkjW 1)(
, (1.63)
тогда
.arctg)(
,1lg20lg201lg20)(
2222
T
TkTkL
(1.64)
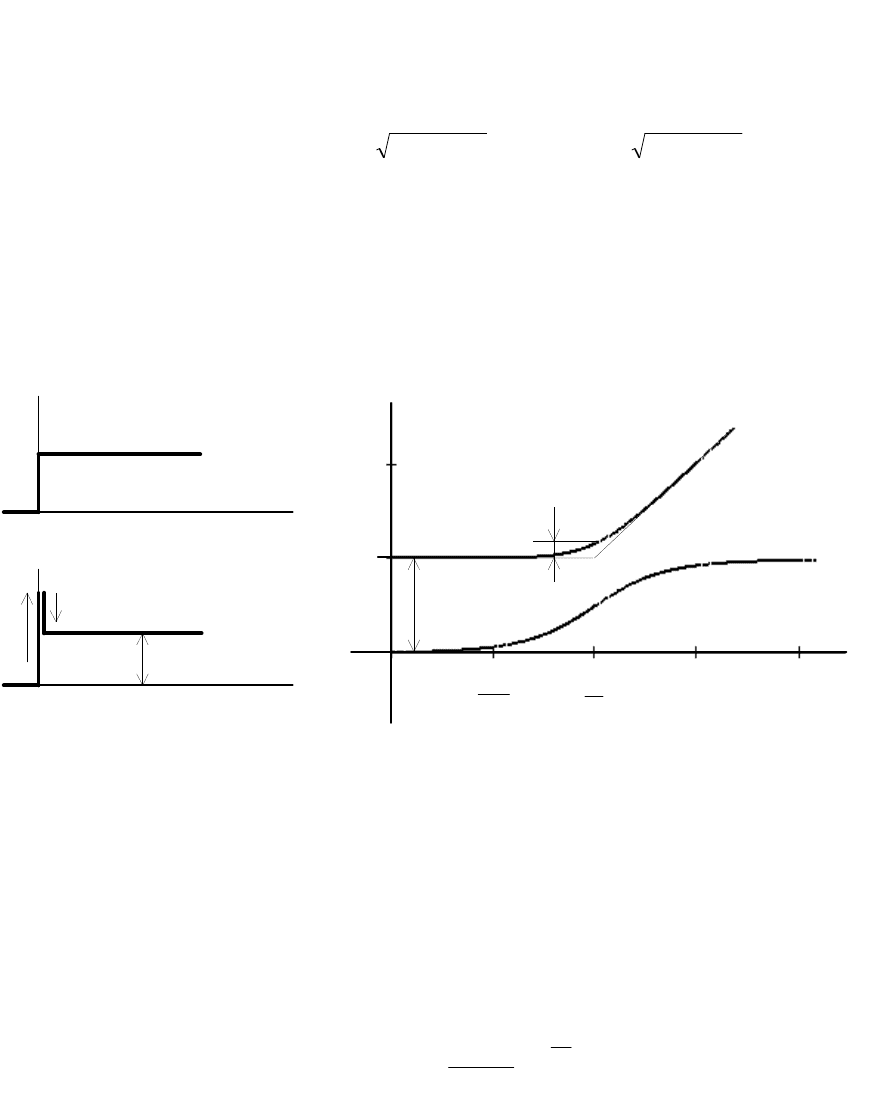
Временные и логарифмические частотные характеристики звена
приведены на рис. 1.17. Дифференцирующее идеальное звено первого
порядка можно рассматривать как параллельное включение двух
звеньев: идеального дифференцирующего с постоянной времени
д
T
и
безынерционного с коэффициентом усиления k.
t
t
lg
L
( )
L( )
20lg
1
T
1
k
x
y
+20 дБ/дек
3 дБ
90
0
45
0
> 1
1
T
д
а б
град
дБ
3
1000
, с
-1
k
k
Рис. 1.17. Временные (а) и частотные (б) характеристики
дифференцирующего идеального звена первого порядка
4. Интегродифференцирующее звено первого порядка
Дифференциальное уравнение и передаточная функция звена
приведены в табл. 1.1 (п. 11). Переходная функция звена при единичном
входном воздействии имеет вид
2
e1)(
2
21
T
t
T
TT
kth
. (1.65)
Амплитудно-фазовая характеристика звена
32
2
1
1
1
)(
Tj
Tj
kjpW
, (1.66)
тогда
2
2
22
1
2
1lg201lg20lg20)( TTkL
, (1.67)
21
arctgarctg)( TT
. (1.68)
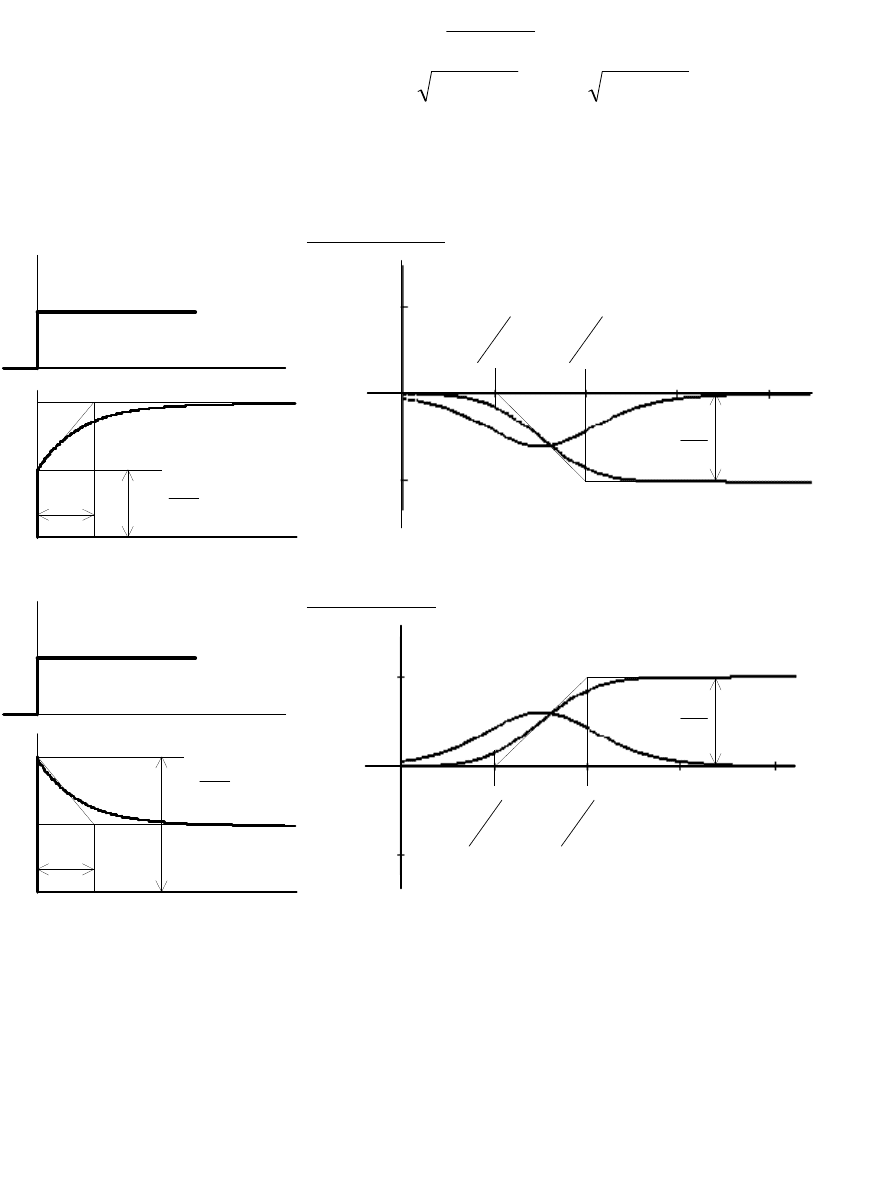
Временные и логарифмические частотные характеристики звена
приведены на рис. 1.18.
t
1
x
y
t
1
x
y
При
2
T
1
При
2
T
1
t
t
k
T
2
20
-90
дБ L
град
lg
L( )
( )
1
2
T
1
1
T
град
-90
20
дБ L
L( )
( )
lg
1
2
T
1
1
T
k
T
2
а б
в
г
0
1
0
1
k
T
T
1
2
k
T
T
1
2
20
2
1
lg
T
T
20
1
2
lg
T
T
3 4
10000
, с
-1
1000
2
, с
-1
-
Т
= 1k
= 1k
T
Рис. 1.18. Временные (а, в) и частотные (б, г) характеристики
интегродифференцирующего звена
В зависимости от соотношения постоянных времени
1
T
и
2
T
возможны три случая:
– при
21
TT
это безынерционное звено;
– при
21
TT
звено по своим свойствам приближается к
дифференцирующему звену;
– при
12
TT
звено по своим свойствам приближается к
интегрирующему звену.
5. Дифференцирующее идеальное звено второго порядка
33

Дифференциальное уравнение и передаточная функция звена для
общего случая приведены в табл. 1.1 (п. 7). Переходная функция звена
при единичном входном воздействии имеет вид
ktTk
t
t
Tkth
)(2
)(
)(
2
d
d
. (1.69)
Амплитудно-фазовая характеристика звена имеет вид
TjTkjW 21)(
22
, (1.70)
тогда
44222
1221lg20lg20)( TTkL
, (1.71)
.
T
1
> при
1
2
arctg
2
=)(
,
T
1
<при
1
2
arctg)(
22
22
T
T
T
T
(1.72)
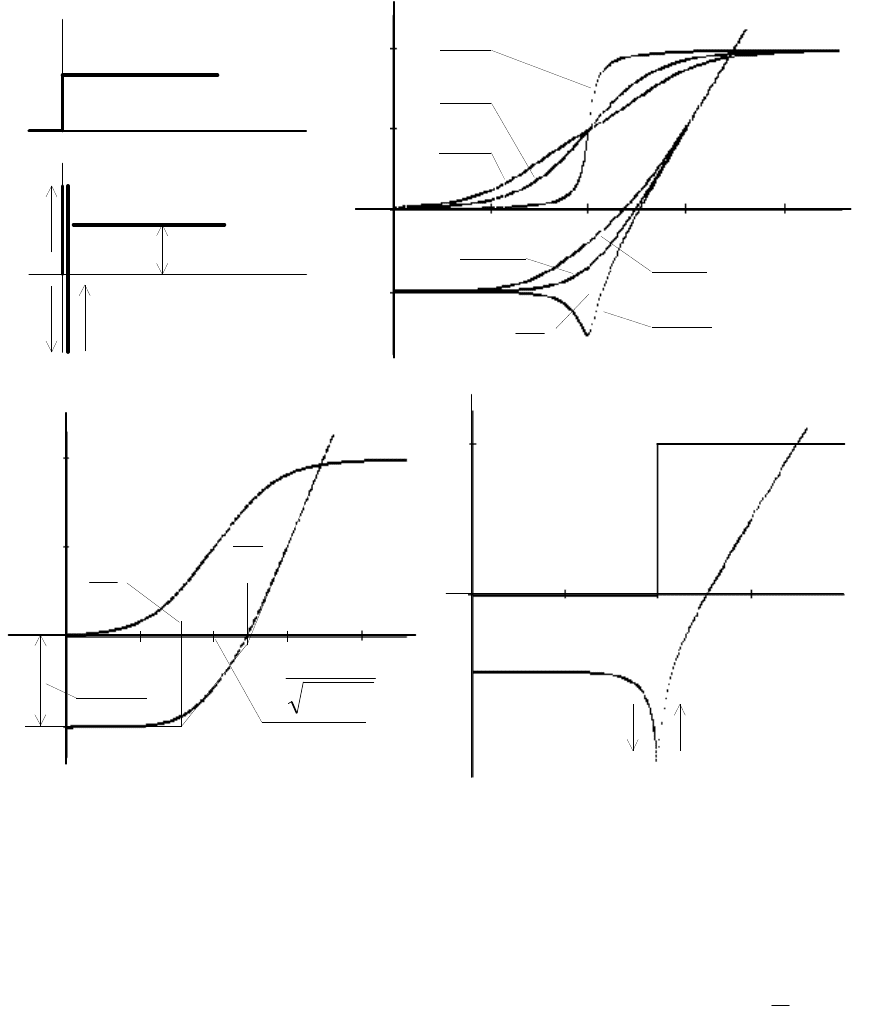
Временные и логарифмические частотные характеристики звена
приведены на рис 1.19, а и б. Вид частотных характеристик
определяется значением коэффициента
. При
1
звено может быть
представлено двумя последовательно включенными
дифференциальными звеньями первого порядка (см. табл. 1.1 п. 7.1).
Выражения (1.70), (1.71), (1.72) в этом случае можно записать в
следующем виде:
43
11)( TjTjkjW
, (1.73)
2
4
2
3
1lg201lg20lg20)( TTkL
, (1.74)
43
)( TT arctgarctg
. (1.75)
Характеристика переходного процесса звена не изменяется
(см. рис. 1.19, а), а логарифмические частотные характеристики
принимают вид, показанный на рис. 1.19, в.
При
0
получается так называемое вырожденное
дифференцирующее звено (см. табл. 1.1 п. 7.2), для которого выражения
(1.70), (1.71) и (1.72) принимают вид
22
1)( TkjW
, (1.76)
2222
1lg20lg201lg20)( TkTkL
, (1.77)
TT
1
при180и
1
при0)(
0
. (1.78)
34
t
t
1
k
x
y
а б
+180
+90
дБ L
град
1
1
1
1
1
1
( )
L( )
+40 дБ/дек
lg
0
1
1
T
+180
+90
дБ L
град
lg
в
( )
L( )
+40 дБ/дек
1
20lg k
1
3 4
T T
1
3
T
1
4
T
г
+180
дБ L
град
0
+40 дБ/дек
L( )
( )
lg
0
1
k
< 1
0
1
3 4
1000
, с
-1
1 3
10 1000
, с
-1
0
0
10
1000
3
, с
-1
0
0
k
< 1, k < 1, k
Рис. 1.19. Временные (а) и частотные характеристики идеального
дифференцирующего звена второго порядка
Характеристика переходного процесса и в этом случае не
изменяется (см. рис. 1.19, а), а частотные характеристики принимают
вид, приведенный на рис. 1.19, г. ЛАЧХ звена на частоте
T
k
1
имеет
резонансный провал. Коэффициент усиления гармонического входного
сигнала на этой частоте становится равным нулю. Представим
дифференцирующее звено второго порядка при
0
в соответствии с
передаточной функцией, приведенной в табл. 1.1 п. 7.2, в виде
структурной схемы, приведенной на рис. 1.20.
35
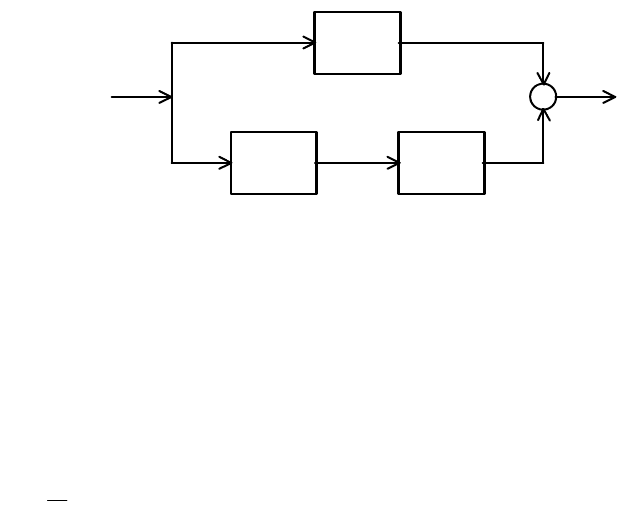
kT p
2
T p
2
k
y
2
y
3
y
1
yx
Рис. 1.20. Структурная схема дифференцирующего звена второго
порядка при
0
В соответствии со структурной схемой можно записать
)()()(
31
tytyty
,
где при гармоническом входном сигнале
txkty sin)(
1
;
tTxkty sin)(
22
3
,
тогда
tTxkty sin1)(
22
и при
T
1
имеем y = 0.
Для закрепления материала по теме «Типовые динамические
звенья линейных систем регулирования» и получения навыков
проведения экспериментальных исследований на физических и
имитационных моделях рекомендуется обратиться к работе [6].
Список литературы к подразделу 1.2
1. Бабаков Н.А., Воронов А.А и др. Теория автоматического
управления: учеб. для вузов. Ч. 1. Теория линейных систем
автоматического управления / под редакцией А.А. Воронова. – М.:
Высшая школа, 1986. – 367 с. (гл. 2, разделы 2, 3, 6).
2. Макаров И.М., Менский Б.М. Линейные автоматические
системы (элементы теории, методы расчета и справочный материал):
учеб. пособие для вузов. – М.: Машиностроение, 1977. – 464 с. (гл. 2,
разделы 2.4 – 2.6, 5.3).
3. Бесекерский В.А., Попов Е.П. Теория систем
автоматического регулирования. – М.: Наука, 1978. – 736 с. (гл. 4).
4. Иващенко Н.Н. Автоматическое регулирование. Теория и
элементы систем: учебник для вузов. – М.: Машиностроение, 1978. –
736 с. (гл. 10, Приложение 2).
5. Справочник по автоматизированному электроприводу/ под
ред. В.А. Елисеева и А.В. Шинянского. – М.: Энергоатомиздат, 1983. –
616 с. (раздел 1, §1.3, §1.4).
6. Мальцева О.П., Кояин Н.В., Удут Л.С. Исследование
временных и частотных характеристик типовых динамических звеньев
36
линейных САУ. Методические указания по выполнению лабораторных
работ по курсу ТАУ. – Томск: ТПУ, 1999. – 47 с.
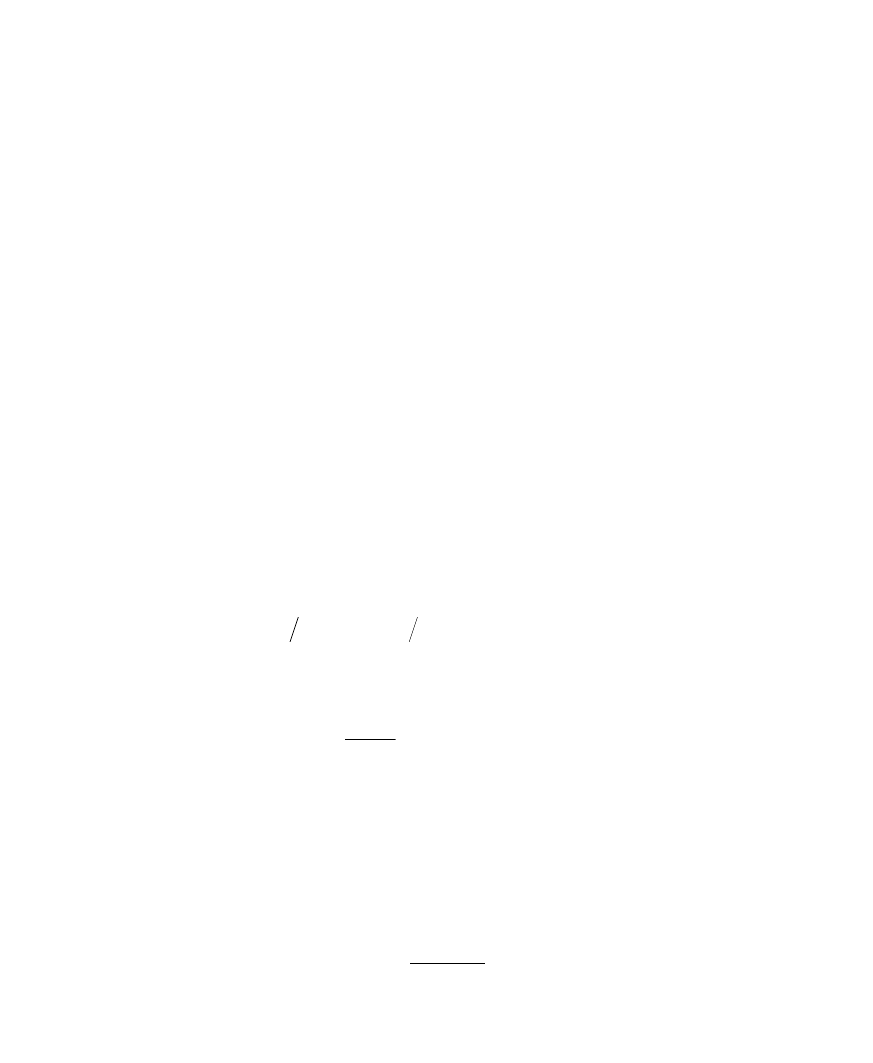
1.3. Передаточные функции контура регулирования
Контур регулирования (рис. 1.21, а) в общем случае состоит из
объекта регулирования с передаточной функцией
)()()(
об2об1об
pWpWpW
, регулятора
)(
рег
pW
и цепи обратной связи
)(
ос
pW
. В контуре
регулирования действует управляющее (задающее) воздействие
(задание) и возмущающее воздействие (возмущение). Управляющее
воздействие замкнутый контур должен воспроизводить, а возмущающее
воздействие подавлять.
Передаточная функция разомкнутого в любом месте (например, в
т. а) контура регулирования
)()()()()(
особ2об1регр
pWpWpWpWpW
. (1.79)
Обратим внимание на то обстоятельство, что в системах
регулирования с единичной обратной связью
1)(
ос
pW
, и тогда
)()(
ос
tyty
, а ошибка обратной связи
)(
ос
t
является ошибкой
регулирования
)(ty
координаты y. В практических системах
регулирования часто
1)(
ос
pW
, тогда
)()()(
осос
pypWpy
, и в
результате координаты
ос
y
и y ни в динамических, ни в
установившихся режимах не равны друг другу, а ошибка
ос
не
является ошибкой регулирования координаты y. В статическом режиме
при p = 0 в общем случае
осос
)( kpW
и тогда
yk
осос
, т. е. ошибки
разнятся численно, но относительные значения ошибок для координаты
ос
y
и y будут равны
задос.задос
yyy
(см. ниже).
Передаточная функция разомкнутого контура по управлению
(прямого канала) для регулируемой координаты y
)()()(
)(
)(
)(
об2об1регр.у
pWpWpW
px
py
pW
, (1.80)
и тогда
)()()(
р.у
pxpWpy
.
Передаточная функция (1.79) является передаточной функцией
разомкнутого контура по управлению для координаты обратной связи
ос
y
)(
)(
)(
)(
р
ос
*
р.у
pW
px
py
pW
, (1.81)
и тогда
)()()(
*
у.рос
pxpWpy
.
37
W p
рег
( ) W p
об1
( )
W p
об2
( )
W p
ос
( )
x(t) y(t)
(-)
б
W p
рег
( )W p
об1
( )
W p
об2
( )
W p
ос
( )
y(t)-z(t)
(-)
в
W p
рег
( ) W p
об1
( ) W p
об2
( )
W p
ос
( )
z(t)
(-)
(-)
)
y t(
y(t)
(-)
y t
зад
( )
y t
ос
( )
т.
x(t)
ос
t( )
а
1
k
ос
а
Рис. 1.21. Типичная структурная схема контура регулирования:
)( pW
рег
–
передаточная функция регулятора;
)(
1
pW
об
и
)(
2
pW
об
– передаточные функции
объекта;
)( pW
ос
– передаточная функция цепи обратной связи; x – управляющее
воздействие; z – возмущающее воздействие; y – регулируемая координата;
ос
y
–
контролируемая координата;
ос
– ошибка обратной связи (рассогласование);
y
– ошибка регулирования
Передаточная функция разомкнутого контура по возмущению для
регулируемой координаты y
)(
)(
)(
)(
2обв.р
pW
pz
py
pW
, (1.82)
и тогда
)]([)()(
в.р
pzpWpy
.
38

Передаточная функция разомкнутого контура по возмущению для
координаты обратной связи
y
ос
)()(
)(
)(
)(
ос2об
ос
*
в.р
pWpW
pz
py
pW
, (1.83)
и тогда
)]([)()(
*
в.рос
pzpWpy
.
Передаточная функция замкнутого контура по управлению для
регулируемой координаты y (рис. 1.21, б)
)(1
)(
)(
1
)(1
)(
)(
)(
)(
р
р
оср
у.р
з.у
pW
pW
pWpW
pW
px
py
pW
, (1.84)
и тогда
)()()(
з.у
pxpWpy
.
Передаточная функция замкнутого контура по управлению для
координаты обратной связи
y
ос
)(1
)(
)(
)(
)(
р
р
ос
*
з.у
pW
pW
px
py
pW
, (1.85)
и тогда
)()()(
*
з.уос
pxpWpy
.
Передаточная функция замкнутого контура по возмущению для
регулируемой координаты y (рис. 1.21, в)
)(1
)(
)(
)(
)(
р
в.р
з.в
pW
pW
pz
py
pW
, (1.86)
и тогда
)]([)()(
з.в
pzpWpy
.
Передаточная функция замкнутого контура по возмущению для
координаты обратной связи
ос
y
)(1
)(
)(
)(
р
*
.вр
ос
*
з.в
pW
pW
pz
py
W
, (1.87)
и тогда
)]([)()(
*
з.вос
pzpWpy
.
Знак (–) на входе возмущающего воздействия (см. рис. 1.21, а) не
учитывается при записи передаточных функций (1.82), (1.83) и (1.86),
(1.87), но при записи дифференциальных уравнений он обязательно
должен быть учтен. Физический смысл знака (–) заключается в том, что
увеличение численного значения возмущающего воздействия приводит
к уменьшению численного значения выходной координаты и наоборот.
В случае, когда на контур действует оба воздействия:
)]([)()()()(
з.вз.у
pzpWpxpWpy
,
)]([)()()()(
*
з.в
*
з.уос
pzpWpxpWpy
.
39
Если в передаточных функциях (1.84)–(1.87) все операторы p
принять равными нулю, то получим выражения для статических
характеристик контура, соответственно, по управлению и возмущению:
xkyxky
*
з.уосз.у
,
при x = const, z = 0; (1.88)
)( ),(
*
з.восз.в
zkxzky
при z = const, y = 0, (1.89)
где
y
и
ос
y
, соответственно, представляют собой статические
ошибки (установившиеся ошибки в статическом режиме при
t
) по
возмущению контура регулирования и обратной связи.
Если оператор p принять равным нулю в передаточной функции
цепи обратной связи
)(
ос
pW
, то найдем коэффициент обратной связи
y
y
k
ос
ос
. (1.90)
Для общего случая, когда
1
ос
k
, заданное значение выходной
координаты в динамике определяется выражением
ос
зад
)(
)(
k
tx
ty
, (1.91)
а в статическом режиме
ос
зад
k
x
y
. (1.92)
С учетом выражений (1.91) и (1.92) динамическая ошибка
воспроизведения контуром задания (на рис. 1.21 показано пунктиром)
определяется по выражению
)(
)(
)(
ос
ty
k
tx
ty
, (1.93)
а значение статической ошибки контура по управлению, т. е.
установившейся ошибки в статическом режиме при
t
, равно
уст
ос
ст
y
k
x
y
. (1.94)
Ошибка обратной связи
ос
в динамике определяется по
выражению
)()()(
осос
tytxt
, (1.95)
а статическая ошибка обратной связи по управлению
стосос.стос.ст
ykyx
. (1.96)
После нормализации формы записи передаточных функций
(1.84)–(1.87) они приводятся к виду:
)(
)(
Wи
)(
)(
)(
*
*
з.уз.у
pA
pB
pA
pB
pW
;
)(
)(
)( Wи
)(
)(
)(
*
*
з.вз.в
pA
pD
p
pA
pD
pW
.
Тогда в соответствии с (1.2) и (1.3) можно перейти к
дифференциальным уравнениям, описывающим поведение замкнутого
контура регулирования при действии управляющего воздействия:
40