Удут Л.С., Кояин Н.В., Мальцева О.П. Проектирование и исследование автоматизированных электроприводов. Часть 1. Введение в технику регулирования линейных систем Часть 2. Оптимизация контура регулирования
Подождите немного. Документ загружается.

)(ф
п
– граничная частота полосы пропускания по фазе,
соответствующая значению фазы
90 )(
;
0
)(
)(
з.у
макс
з.у
jW
jW
M
– показатель колебательности.
град
дБ L
-90
20 lg ( )
max
W j
3 дБ
( )
L ( )
п
м( )
сз
п
ф( )
р
lg
20 lg
20
0
lg ( )W j
0
1
, с
-1
М
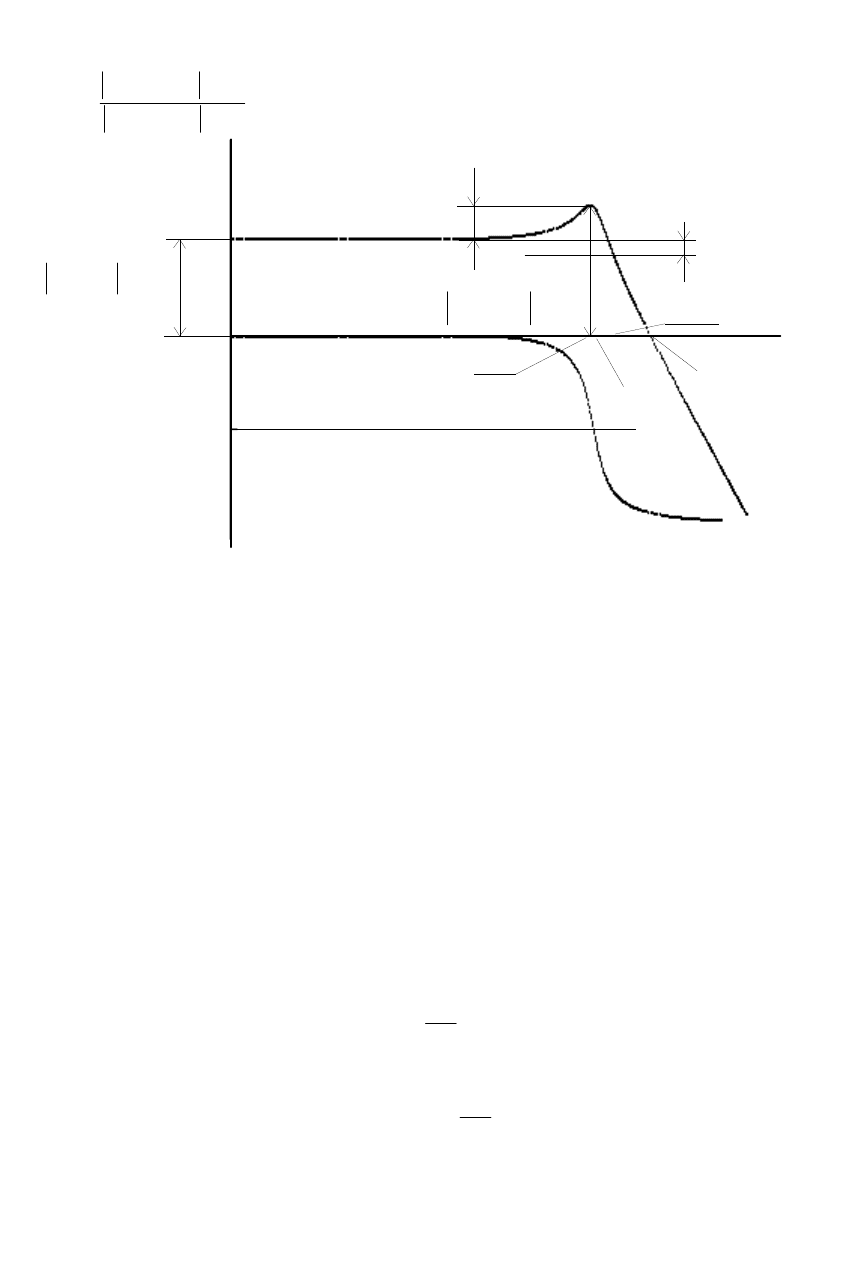
Рис. 1.30. ЛЧХ по управлению замкнутой системы:
)(L
–
амплитудная;
)(
– фазовая
Показатель колебательности M характеризует склонность системы
к колебаниям. Чем выше M, тем больше колебательность и тем менее
качественна система при прочих равных условиях. В общем случае
считается допустимым, если
5.11.1 M
. Резонансная частота
р
и
полоса пропускания
п
однозначно связаны между собой и
характеризуют быстродействие системы. Однако получить названные
зависимости в общем виде не удается, они могут быть определены лишь
при анализе конкретных структурных схем систем регулирования. В
первом приближении для колебательного переходного процесса можно
принять
р
рум
t
,
и если переходный процесс имеет 1–2 колебания, то
р
2
2
)21(
ру
t
.
В случае колебательного переходного процесса резонансная
частота
р
ЛАЧХ замкнутой системы близка к частоте среза
ср
ЛАЧХ разомкнутой системы (рис. 1.31). Поэтому в приведенных
выражениях
рум
t
и
2ру
t
можно принять
ср
р
.
В качестве типовых ЛЧХ контуров регулирования в системах
управления электроприводами используются характеристики
61
разомкнутого контура, имеющие в области частоты среза наклон –20
дБ/дек.
град
дБ L
1
7
8
6
cр
2
3
h
-180
lg
5
4
L
( )
L ( )
20lg
р
k
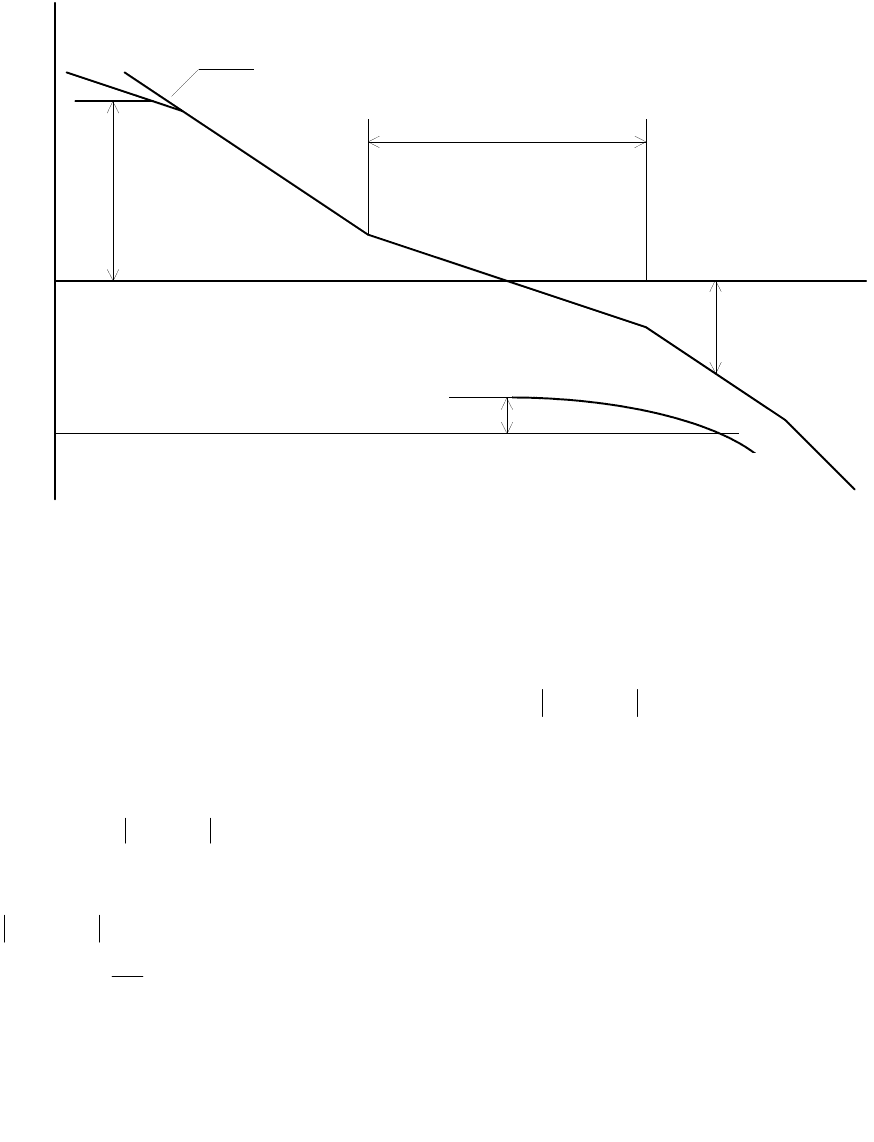
Рис. 1.31. ЛЧХ разомкнутой системы:
)(L
– асимптотическая амплитудная
(т. 1–2–3–4 – типа “2–1–2”; т. 1–2–3–5 – типа “2–1”; т. 6–2–3–4 – типа “1–2”);
)(
– фазовая
На рис. 1.31 приведены ЛЧХ разомкнутой системы. Они
характеризуются следующими показателями:
– запас устойчивости по фазе при
1)(
р
jW
(рекомендуется
не менее
30
);
L
– запас устойчивости по модулю при
180 )(
(рекомендуется не менее 6 дБ);
0
)(
рр
jWk
– коэффициент усиления разомкнутой статической
системы;
ср
– частота среза разомкнутой системы, соответствующая
1)(
р
jW
;
2
3
h
– протяженность участка с наклоном –20 дБ/дек, который
определяет значения показателя колебательности и запаса
устойчивости;
2
и
3
– граничные частоты участка с наклоном –20 дБ/дек.
Частота
2
определяет процесс затухания перерегулирования, который
имеет апериодический характер с постоянной времени, примерно
62
равной
2
/1
. Чем больше частота
2
(чем ближе она к
ср
), тем
больше перерегулирование, но тем быстрее оно затухает и меньше
время переходного процесса. Наоборот, при уменьшении частоты
2
уменьшается перерегулирование, но затягивается время его
существования и время переходного процесса в целом.
ЛЧХ получили широкое применение в практике при синтезе,
анализе и настройке систем автоматического управления
электроприводами, что объясняется простотой их расчета, построения и
возможностью экспериментального определения. Остановимся
подробнее на связи ЛЧХ и переходных процессов.
Знание показателя колебательности М позволяет достаточно точно
оценить показатели переходного процесса (рис. 1.22). Численное
значение М может быть найдено по ЛАХ замкнутой системы (см. выше)
или по зависимости протяженности участка с наклоном -20 дБ/дек ЛАХ
разомкнутой системы h и показателя колебательности М
1
1
M
M
h
. (1.125)
При заданном значении M можно определить значения граничных
частот участка h:
;
1
М
М
2
ср
М
М 1
3
ср
. (1.126)
Если известно значение М, то перегулирование в общем случае
может быть найдено по приближенным выражениям:
1
45
)45.045.1(
0
Marctg
(1.127)
или
М
1
1
. (1.128)
Время достижения максимума определяется приближенным
выражением
ср
рум“
)14.33(
t
, (1.129)
при
0 2.
для системы “2–1” и “2–1–2” следует использовать
выражение
ср
рум“
34.1
t
. (1.130)
Остальные показатели переходного процесса могут быть
определены по значениям
и
рум
t
:
1
ln
1
1 arctg
румру1
tt
(1.131)
– время первого согласования;
63

1
ln
3
рум
(5)
ру2
tt
(1.132)
– время переходного процесса.
При монотонном характере переходного процесса (см. рис. 1.22, а)
время запаздывания
з
t
определяется суммой малых постоянных
времени в контуре регулирования:
Тt
з
, (1.133)
или в соответствии с ЛАЧХ разомкнутой системы
43
11
з
t
, (1.134)
а время нарастания
ср
н
1
t
. (1.135)
Коэффициент усиления разомкнутой системы k
р
(характеристика 8
рис. 1.31) определяет коэффициент усиления замкнутой системы
раз
ос
з.у
k
k
k
1
/1
(1.136)
и в конечном итоге статическую ошибку по управлению
рос
задз.узад
ос
задустзаду.уст
kk
xkx
k
xyyy
1
111
. (1.137)
Астатическая система первого порядка (характеристика 7
рис. 1.31) обеспечивает нулевую статическую ошибку и добротность по
первой производной (скорости изменения) входного сигнала
02
ск
D
. (1.138)
Астатическая система второго порядка (характеристика 1
рис. 1.31) обеспечивает нулевую статическую ошибку, добротность по
первой производной
ск
D
и добротность по второй производной
(ускорению) входного сигнала
2
2
01
сруск
D
. (1.139)
Выражения (1.126) и приведенные соотношения для параметров
системы регулирования и ЛЧХ дают основу для синтеза желаемой ЛАХ
по заданным показателям переходного процесса и точности. В [5]
рассматривается случай расположения участка h симметрично
относительно частоты
р
. В практике систем автоматического
управления электроприводами широко применяется настройка контуров
регулирования с ЛАХ, имеющими участок h, расположенный
симметрично частоты
ср
:
a
ср2
ср
3
. Этот случай рассмотрен в [7].
64
Список литературы к подразделу 1.4
1. Бабаков Н.А., Воронов А.А. и др. Теория автоматического
управления: учеб. для вузов. Ч. 1. Теория линейных систем
автоматического управления / под редакцией А.А. Воронова. – М.:
Высшая школа, 1986. – 367 с. (гл. 3, 4).
2. Макаров И.М., Менский Б.М. Линейные автоматические
системы (элементы теории, методы расчета и справочный материал):
учеб. пособие для вузов. – М.: Машиностроение, 1977. – 464 с. (гл. 4, 7).
3. Иващенко Н.Н. Автоматическое регулирование. Теория и
элементы систем: учебник для вузов. – М.: Машиностроение, 1978. –
736 с. (гл. 12).
4. Топчеев Ю.И. Атлас для проектирования систем
автоматического регулирования: учеб. пособие для вузов. – М.:
Машиностроение, 1989. – 752 с. (гл. 5).
5. Бесекерский В.А., Попов Е.П. Теория систем
автоматического регулирования. – М.: Наука, 1978. – 736 с. (гл. 8, §8.7 и
8.8; гл. 12, §12.6).
6. Иванов В.Н. и др. Математические основы теории
автоматического регулирования: учеб. пособие для вузов / под
редакцией Б.К. Чемоданова. – М.: Высшая школа, 1971. – 808 с. (гл. 5,
§16, п. 2).
7. Шипилло В.П. Автоматизированный электропривод. – М.:
Энергия, 1969. – 400 с. (гл. 7).
8. Бесекерский В.А. Динамический синтез систем
автоматического регулирования. – М.: Наука, 1970. – 576 с. (гл. 1, 2, 8).
9. Попов Е.П. Теория линейных систем автоматического
регулирования и управления: учеб. пособие для втузов. – М.: Наука, 1989.
– 304 с. (гл. 5).
10. Дорф Р. Современные системы управления / Р.К. Дорф, Р.Х.
Бишоп: пер. с англ. – М.: Лаб. базовых знаний, 2004. – 831 с.
1.5. Аналоговые регуляторы на операционных усилителях
1.5.1. Общие сведения
Регулятор в контуре регулирования преобразует сигнал
рассогласования в управляющее воздействие, которое действует на
объект в сторону уменьшения рассогласования. Это преобразование
осуществляется в соответствии с математическими операциями,
требуемыми по условиям работы системы регулирования. К таким
65
требуемым операциям относятся следующие преобразования сигнала:
пропорциональное, интегральное, пропорционально-интегральное,
пропорционально-интегрально-дифференциальное и т. п.
Основу аналогового регулятора составляет операционный
усилитель (ОУ) – усилитель постоянного тока с высоким
коэффициентом усиления в разомкнутом состоянии. Интегральные ОУ
выполнены по схеме многокаскадного усилителя с непосредственными
связями между каскадами и дифференциальным входным каскадом. В
результате ОУ имеет два входа (инвертирующий и неинвертирующий) и
большой коэффициент усиления. Выходное напряжение положительной
и отрицательной полярности обеспечивается питанием от
разнополярных источников питания. Многокаскадный ОУ имеет
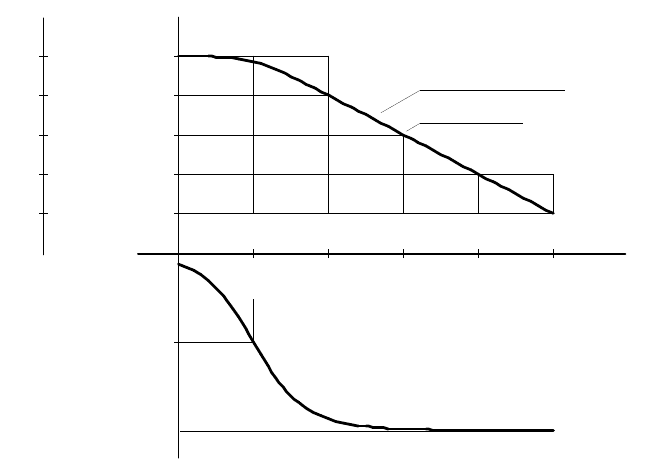
внутреннюю или внешнюю коррекцию, в результате которой его
частотные характеристики приближены к характеристикам
инерционного звена первого порядка (рис. 1.32).
10
2
10
3
10
4
10
5
10
20
40
60
80
100
дБ
1 2 3 4 5 lg
-90
-45
10 10
2
10
3
10
4
10
5
, Гц
-20 дБ/дек
(f)
k
уо
k
уо
; 20lg
уо
0
1
20lg k
уо
град
k
f
f
Рис. 1.32. Пример амплитудной и фазовой характеристики операционного
усилителя с внутренней коррекцией
Таким образом, ОУ имеет ограниченный коэффициент усиления,
ограниченную полосу пропускания частоты входного сигнала, кроме
того, его параметры существенно зависят от напряжения,
сопротивления нагрузки, температуры нагрева и, следовательно, будут
оказывать влияние на характеристики и параметры регуляторов,
реализованных на их основе.
Существенное уменьшение температурной зависимости
параметров достигается в усилителях постоянного тока, работающих по
принципу модуляция – усиление – демодуляция, однако динамические
66

свойства такого усилителя оказываются сравнительно невысокими из-за
необходимости фильтрации выходного сигнала.
Требуемые свойства регулятора операционному усилителю
придаются с помощью выбора соответствующих входных цепей и цепей
обратных связей. На входе усилителя происходит сравнение сигналов
задания и фактического значения регулируемой величины (сигнала
обратной связи) в виде токов, пропорциональных входным
напряжениям. Входные токи изменяются во времени соответственно
свойствам входных цепей, в которых они формируются. Входные цепи,
в том числе и обратной связи, в общем случае состоят из активных и
реактивных сопротивлений.
Анализировать работу регулятора можно либо исследуя
зависимость выходного напряжения от тока рассогласования, либо
исследуя зависимость выходного напряжения от напряжения на одном
из входов, считая, что напряжение на втором входе отсутствует, т. е.
исследуя зависимость от каждого из входных напряжений в
отдельности. Этот прием правомерен, если входные цепи и цепи
обратной связи линейны, т. е. если применим принцип наложения. Сам
ОУ в общем случае при анализе считается идеальным:
• напряжение выхода при напряжении входа 0 В 0 В;
• входное сопротивление
Ом;
• коэффициент усиления по напряжению
;
• полоса пропускания
Гц;
• скорость нарастания выходного напряжения
В/c;
• выходное сопротивление 0 Ом.
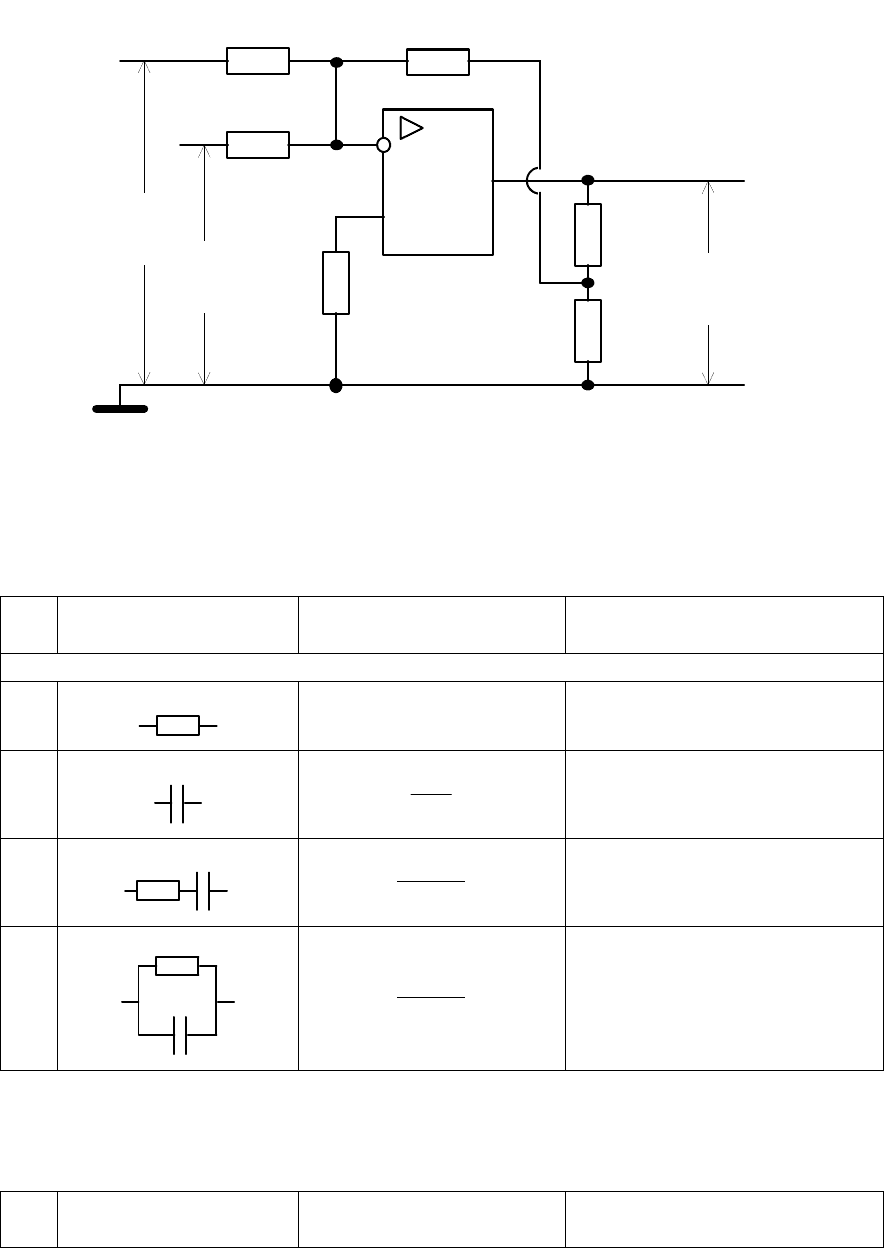
Для реализации регуляторов чаще всего используется схема
суммирующего инвертирующего усилителя (рис. 1.33). Передаточная
функция регулятора для одного входа в общем случае записывается в
следующем виде [2, 3, 8]:
)(
)(
1
)(
)(
)(
)(
)(
5
4
pZ
pZ
pZ
pZ
pU
pU
pW
вх
ос
вх
вых
, (1.140)
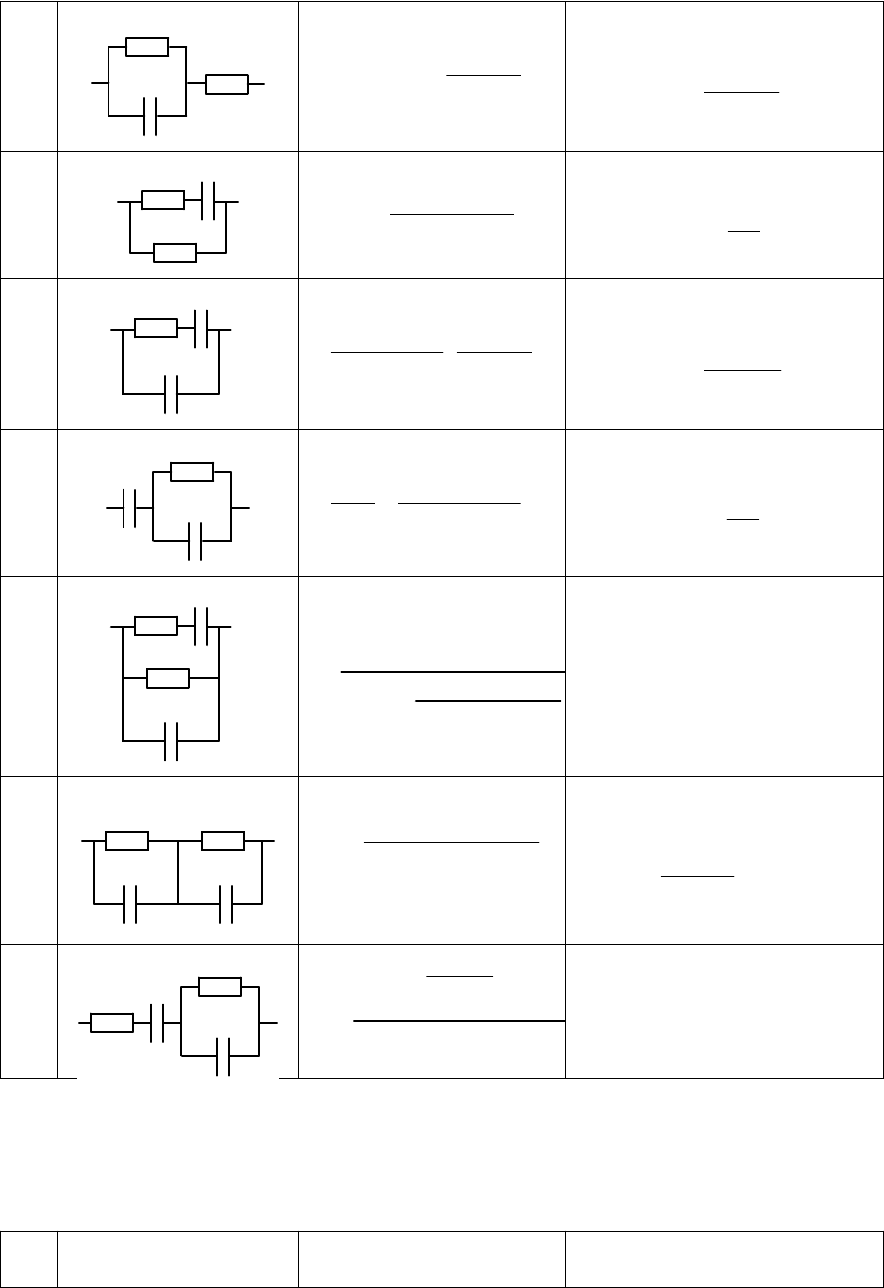
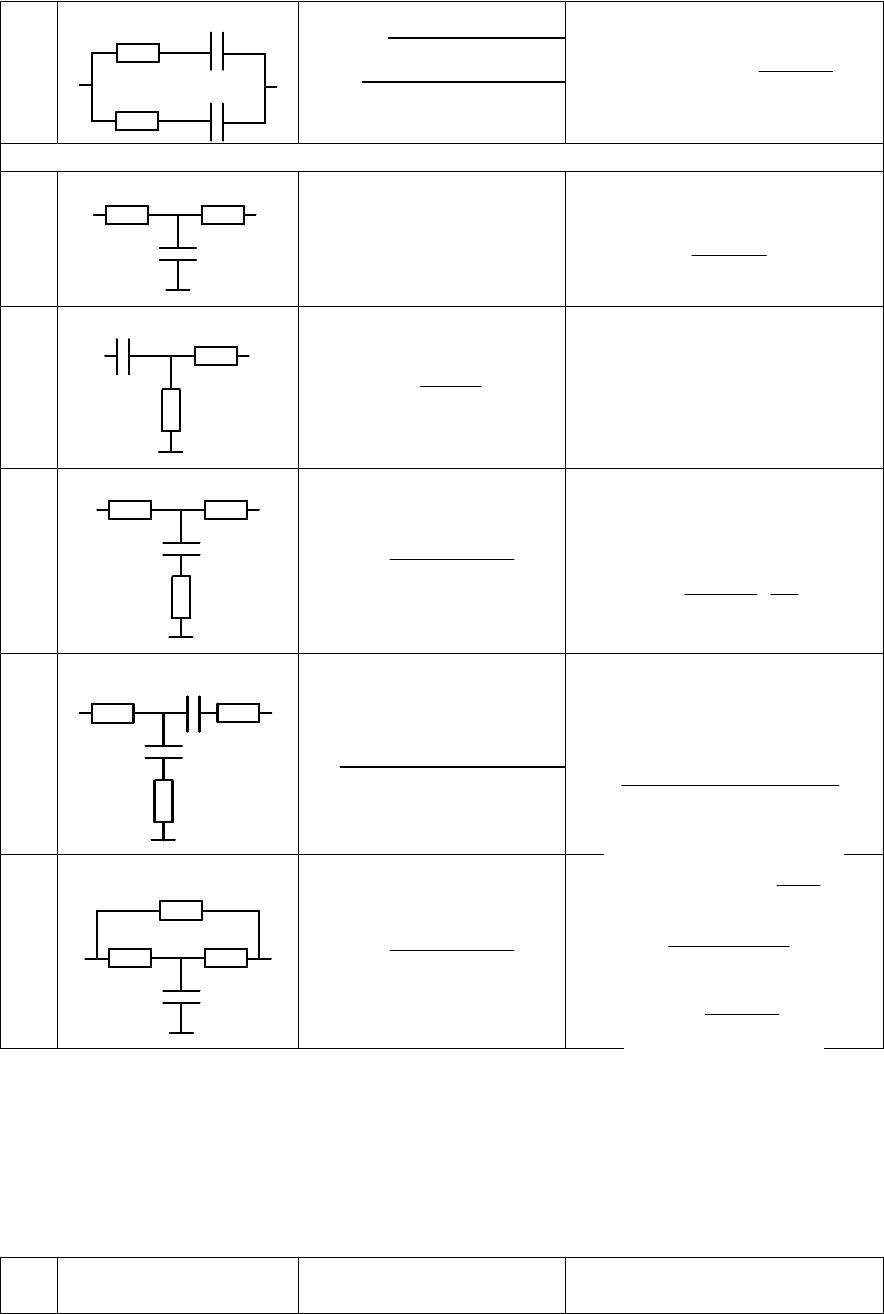
где Z(p) – операторное сопротивление соответствующей цепи (см. табл. 1.5).
67
Z p
вх1
( )
Z p
вх2
( )
Z p
ос
( )
R
Z p
4
( )
Z p
5
( )
U
вх1
U
вх2
U
вых
Рис. 1.33. Обобщенная схема регулятора на основе инвертирующего
усилителя
Таблица 1.5
№
п/п
Схема цепи
Операторные
сопротивления
Расчетные формулы
Д В У Х П О Л Ю С Н И К И
1
R
R
–
2
C
pC
1
–
3
R C
pC
pT1
CRT
4
R
C
pT
R
1
CRT
Продолжение табл. 1.5
№
п/п
Схема цепи
Операторные
сопротивления
Расчетные формулы
68
5
C
1
R
2
R
pT
pT
RR
1
1
)(
21
21
2
1
RR
R
CRT
6
C
1
R
2
R
)1(1
1
2
pT
pT
R
1
2
1
R
R
CRT
7
2
С
1
С
1
R
pT
pT
CCp 1
1
)(
1
21
21
2
11
CC
C
CRT
8
1
C
2
C
1
R
pT
pT
pC 1
)1(11
1
2
1
2
C
C
CRT
9
1
R
2
R
1
C
2
C
21
2
321
1
21
)(1
1
)(
TTp
TTTp
pT
RR
123
222
111
CRT
CRT
CRT
10
1
R
2
R
2
C
1
C
321
31
2
)1)(1(
1
TTT
pTpT
pT
R
э
223
21
21
21
2
111
21
)(
CRT
CC
RR
RR
T
CRT
RRR
э
11
2
C
1
C
2
R
1
R
321
2
31
1
1
)1)(1(
1
TTT
pT
pTpT
pC
122211
31
212131
222
CRCRCR
TT
CCRRTT
CRT
Продолжение табл. 1.5
№
п/п
Схема цепи
Операторные
сопротивления
Расчетные формулы
69
12
2
C
1
C
2
R
1
R
321
2
31
21
1
)1)(1(
)(
1
TTT
pT
pTpT
CCp
223
21
21
212
111
)(
CRT
CC
CC
RRT
CRT
Т Р Е Х П О Л Ю С Н И К И
13
C
2
R
1
R
)1( pTR
э
C
RR
RR
T
RRR
21
21
21э
14
C
2
R
1
R
pT
pT
R
1
2
CRT
1
15
C
3
R
2
R
1
R
pT
pT
R
1
)1(1
э
321
21
3
21
1
RRR
RR
RCT
RRR
э
16
2
C
1
C
2
R
1
R
3
R
)1(
)(1
)(
41
31
2
21
21
pTpT
TTpTTp
RR
314
21
323121
13
3112
2121
)(
)(
RCT
RR
RRRRRR
CT
RRCT
RRCT
17
C
3
R
2
R
1
R
pT
pT
R
1
)1(1
э
21
3
321
21
21
1
1
)(
RR
R
C
RRR
RR
T
RRR
э
Продолжение табл. 1.5
№
п/п
Схема цепи
Операторные
сопротивления
Расчетные формулы
70