Alligood K., Sauer T., Yorke J.A. Chaos: An Introduction to Dynamical Systems
Подождите немного. Документ загружается.


7.1 ONE-DIMENSIONAL L INEAR D IFFERENTIAL E QUATIONS
Figure 7.1(a) shows the family of all solutions of a differential equation, for various
initial conditions x
0
. Each choice of initial value x
0
puts us on one of the solution
curves. This is a picture of the so-called flow of the differential equation.
Definition 7.1 The flow F of an autonomous differential equation is the
function of time t and initial value x
0
which represents the set of solutions. Thus
F(t, x
0
) is the value at time t of the solution with initial value x
0
. We will often
use the slightly different notation F
t
(x
0
) to mean the same thing.
The reason for two different notations is that the latter will be used when
we want to think of the flow as the time-t map of the differential equation. If we
imagine a fixed t ⫽ T,thenF
T
(x) is the map which for each initial value produces
the solution value T time units later. For Newton’s law of cooling, the time-10
map has the current temperature as input and the temperature 10 time units later
as the output. The definition of a time-T map allows us to instantly apply all that
we have learned about maps in the previous six chapters to differential equations.
Figures 7.1 (a) and (b) show the family of solutions (depending on x
0
)
for a ⬎ 0 and for a ⬍ 0, respectively. For (7.6), the flow is the function of two
variables F(t, x) ⫽ xe
at
. Certain solutions of (7.6) stand out from the others. For
example, if x
0
⫽ 0, then the solution is the constant function x(t) ⫽ 0, denoted
x ⬅ 0.
Definition 7.2 A constant solution of the autonomous differential equa-
tion
˙
x ⫽ f(x) is called an equilibrium of the equation.
An equilibrium solution x necessarily satisfies f(x) ⫽ 0. For example, x ⬅ 0
is an equilibrium solution of (7.6). For all other solutions of (7.6) with a ⬎ 0,
lim
t→
⬁
|x(t)| ⫽
⬁
, as shown in Figure 7.1(a). An equilbrium like x
0
⫽ 0 is a fixed
point of the time-T map for each T.
For some purposes, too much information is shown in Figure 7.1. If we were
solely interested in where solutions curves end up in the limit as t →
⬁
,wemight
eliminate the t-axis, and simply show on the x-axis where solution trajectories
are headed. For example, Figure 7.2 (a) shows that the x-values diverge from 0
as t increases. This figure, which suppresses the t-axis, is a simple version of a
phase portrait, which we describe at length later. The idea of the phase portrait is
to compress information. The arrows indicate the direction of solutions (toward
or away from equilibria) without graphing specific values of t.Aswithmaps,we
are often primarily interested in understanding qualitative aspects of final state
277
D IFFERENTIAL E QUATIONS
0
x
0
x
(a) (b)
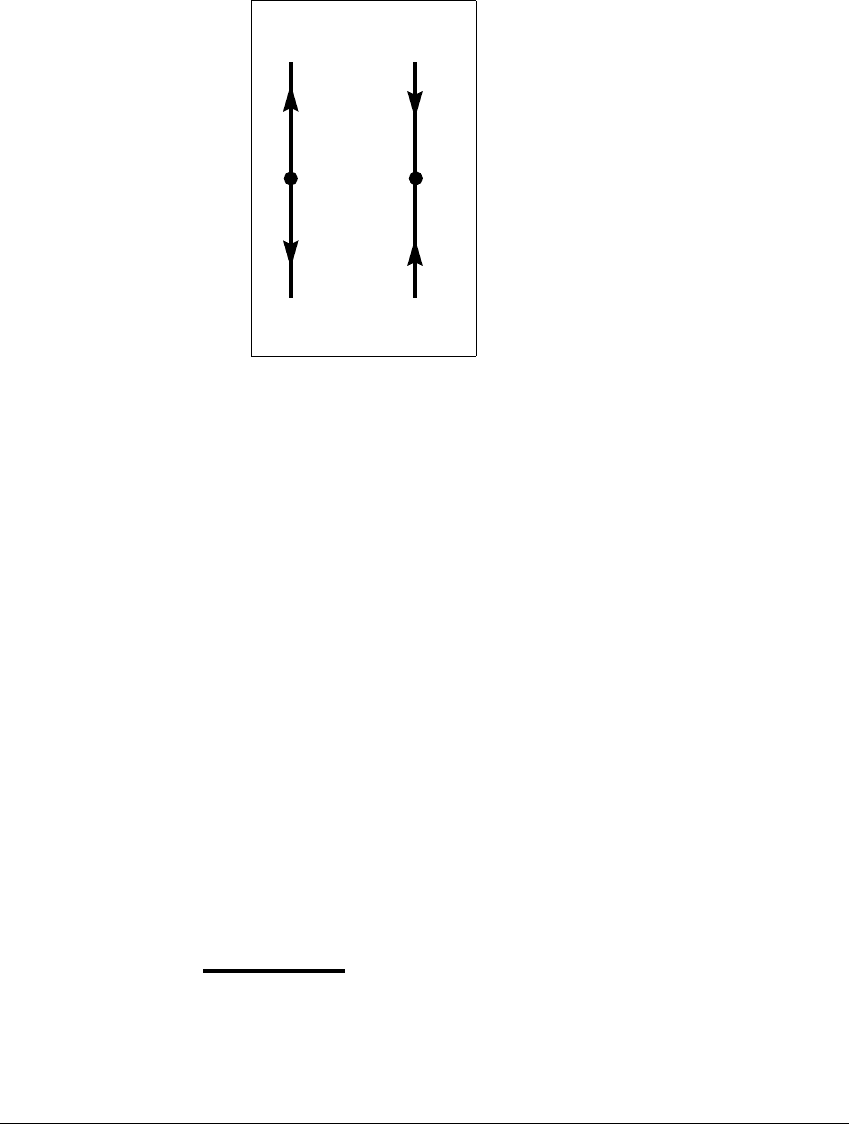
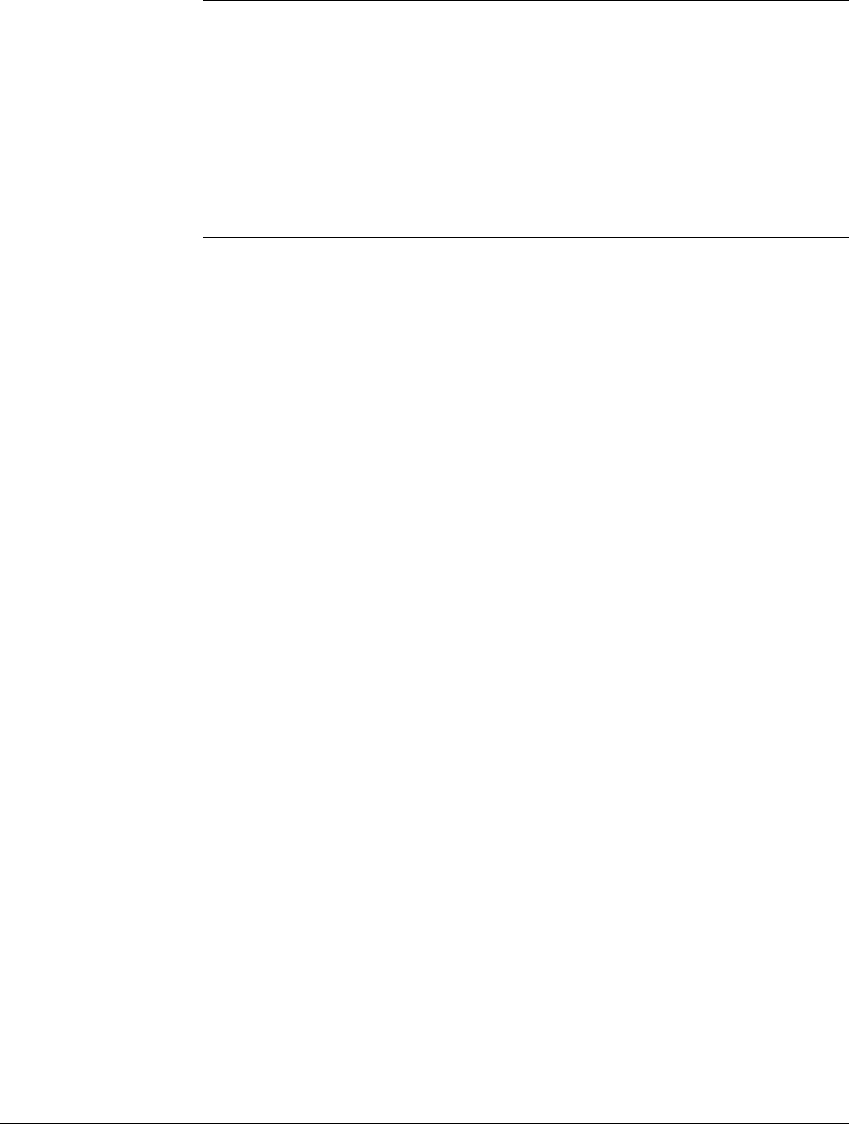
Figure 7.2 Phase portraits of ˙
x
ⴝ
ax.
Since x is a scalar function, the phase space is the real line ⺢. (a) The direction of
solutions is away from the equilibrium for a ⬎ 0. (b) The direction of solutions is
toward the equilibrium for a ⬍ 0.
behavior. Other details, such as the rate at which orbits approach equilibria, are
lost in a phase portrait.
For a ⬍ 0, (7.6) models exponential decay, as shown in Figure 7.2(b),
and x ⬅ 0 is still an equilibrium solution. Examples include Newton’s law of
cooling, which was described above, and radioactive decay, where the mass of a
radioactive isotope decreases according to the exponential decay law. No matter
how we choose the initial condition x
0
, we see that x(t) tends toward 0 as time
progresses; that is, lim
t→
⬁
x(t) ⫽ lim
t→
⬁
x
0
e
at
⫽ 0. The flow F(t, x
0
) of solutions
is shown in Figure 7.1 (b). In the phase portrait of Figure 7.2(b) we suppress t and
depict the motion of the solutions toward 0.
7.2 ONE-DIMENSIONAL NONLINEAR
DIFFERENTIAL EQUATIONS
E XAMPLE 7.3
Equation (7.6) ceases to be an appropriate model for large populations x
because it ignores the effects of overcrowding, which are modeled by non-linear
terms. It is perhaps more accurate for the rate of change of population to be a
278
7.2 ONE-DIMENSIONAL N ONLINEAR D IFFERENTIAL E QUATIONS
logistic function of the population. The differential equation
˙
x ⫽ ax(1 ⫺ x), (7.9)
where a is a positive constant, is called the logistic differential equation.Asx gets
close to 1, the limiting population, the rate of increase of population decreases to
zero.
This equation is nonlinear because of the term ⫺ax
2
on the right side. Although
the equation can be solved analytically by separating variables (see Exercise 7.4),
in this section we will describe alternative methods that are geometric in nature
and that can quickly reveal some important qualitative properties of solutions.
We might ask, for example, which initial conditions yield increasing solutions?
Which yield decreasing solutions? Given an initial population, to what final state
will the population evolve? The qualitative methods developed here are of critical
importance because most nonlinear equations are impossible to solve analytically
in closed form.
We begin by finding constant solutions of (7.9). Setting
˙
x equal to 0 and
solving for x yields two equilibrium solutions: namely x ⬅ 0andx ⬅ 1. Figure
7.3 shows the family of solutions, or flow, of (7.9). For each initial condition x
0
there is a single solution curve that we denote by F(t, x
0
) which satisfies (1) the
x
t
x = 0
x = 1
(a) (b)
Figure 7.3 Solutions of the logistic differential equation.
(a) Solutions of the equation
˙
x ⫽ x(1 ⫺ x). Solution curves with positive initial
conditions tend toward x ⫽ 1ast increases. Curves with negative initial condi-
tions diverge to ⫺
⬁
. (b) The phase portrait provides a qualitative summary of the
information contained in (a).
279
D IFFERENTIAL E QUATIONS
differential equation, and (2) the initial condition x
0
. The solution curve F(t, x
0
)
may or may not be defined for all future t. The curve F(t, 1 2), shown in Figure
7.3, is asymptotic to the equilibrium solution x ⬅ 1, and is defined for all t.On
the other hand, the curves F(t, x
0
) shown in the figure with x
0
⬍ 0 “blow up
in finite time”; that is, they have a vertical asymptote for some finite t. (Since
negative populations have no meaning, this is no great worry for the use of the
logistic equation as a population model.) See Exercise 7.4 to work out the details.
Another example of this blow-up phenomenon is given in Example 7.4.
Since we have not explicitly solved (7.9), how were we able to graph its
solutions? We rely on three concepts:
1. Existence: Each point in the (t, x)-plane has a solution passing through
it. The solution has slope given by the differential equation at that point.
2. Uniqueness: Only one solution passes through any particular (t, x).
3. Continuous dependence: Solutions through nearby initial conditions
remain close over short time intervals. In other words, the flow F (t, x
0
)
is a continuous function of x
0
as well as t.
Using the first concept, we can draw a slope field in the (t, x)-plane by
evaluating
˙
x ⫽ ax(1 ⫺ x) at several points and putting a short line segment with
the evaluated slope at each point, as in Figure 7.4. Recall that for an autonomous
x = 1
x = 0
x
t
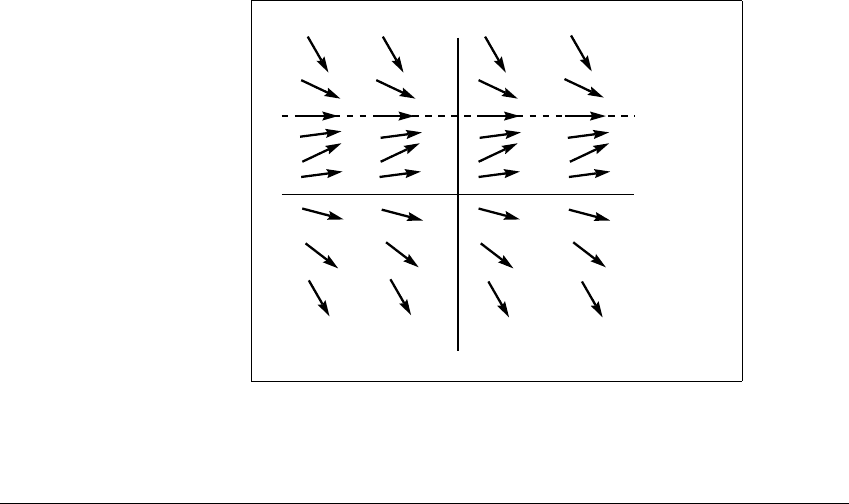
Figure 7.4 Slope field of the logistic differential equation.
At each point (t, x), a small arrow with slope ax(1 ⫺ x) is plotted. Any solution
must follow the arrows at all times. Compare the solutions in Figure 7.3.
280

7.2 ONE-DIMENSIONAL N ONLINEAR D IFFERENTIAL E QUATIONS
equation such as this, the slope for a given x-value is independent of the t-value,
since t does not appear in the right-hand side of (7.9).
Curves can now be constructed that follow the slope field and which, by
the second concept, do not cross. The third concept is referred to as “continuous
dependence of solutions on initial conditions”. All solutions of sufficiently smooth
differential equations exhibit the property of continuous dependence, which is a
consequence of continuity of the slope field. Theorems pertaining to existence,
uniqueness, and continuous dependence are discussed in Section 7.4.
The concept of continuous dependence should not be confused with “sensi-
tive dependence” on initial conditions. This latter property describes the behavior
of unstable orbits over longer time intervals. Solutions may obey continuous de-
pendence on short time intervals and also exhibit sensitive dependence, and
diverge from one another on longer time intervals. This is the characteristic of a
chaotic differential equation.
The phase portrait of the logistic differential equation (7.9) is shown in
Figure 7.3(b). Note how the phase portrait summarizes the information about the
asymptotic behavior of all solutions. It does this by suppressing the t-coordinate.
The arrows on the phase portrait show the sign of the derivative (positive or
negative) for points between, greater than, or less than the equilibrium values.
For one-dimensional autonomous differential equations, the phase portrait gives
almost all the important information about solutions.
When an interval of nonequilibrium points in the phase portrait is bounded
by (finite) equilibria, then solutions for initial conditions in the interval converge
to one equilibrium for positive time (as t →
⬁
) and to the other for negative time
(as t → ⫺
⬁
). The latter corresponds to following all arrows in the slope field
backwards. This fact is illustrated in Figure 7.3, and is the subject of Theorem 8.3
of Chapter 8.
As in the case of iterated maps, an equilibrium solution is called attracting
or a sink if the trajectories of nearby initial conditions converge to it. It is called
repelling or a source if the solutions through nearby initial conditions diverge
from it. Thus in (7.6), x ⬅ 0 is attracting in the case a ⬍ 0 and repelling in the
case a ⬎ 0. In (7.9), x ⬅ 0 is repelling and x ⬅ 1 is attracting.
✎ E XERCISE T7.1
Draw the slope field and phase portrait for
˙
x ⫽ x
3
⫺ x. Sketch the resulting
family of solutions. Which initial conditions lead to bounded solutions?
281
D IFFERENTIAL E QUATIONS
Next we explore the phenomenon of “blow up in finite time”. As men-
tioned above, all initial conditions that lie between two equilibria on the one-
dimensional phase portrait will move toward one of the equilibria, unless it is an
equilibrium itself. In particular, the trajectory of the initial condition will exist
for all time. The following example shows that for initial conditions that are not
bounded by equilibria, solutions do not necessarily exist for all time.
E XAMPLE 7.4
Consider the initial value problem
˙
x ⫽ x
2
x(t
0
) ⫽ x
0
. (7.10)
We solve this problem by a method called separation of variables. First, divide
by x
2
, then integrate both sides of the equation
1
x
2
dx
dt
⫽ 1
with respect to time from t
0
to t:
t
t
0
1
x
2
dx
dt
dt ⫽
t
t
0
dt ⫽ t ⫺ t
0
. (7.11)
Making the change of variables x ⫽ x(t) means that dx replaces
dx
dt
dt, yielding
t ⫺ t
0
⫽
x(t)
x(t
0
)
dx
x
2
⫽⫺
1
x
x(t)
x(t
0
)
⫽⫺
1
x(t)
⫹
1
x(t
0
)
. (7.12)
Solving for x(t), we obtain
x(t) ⫽
1
1
x
0
⫹ t
0
⫺ t
⫽
x
0
1 ⫹ x
0
(t
0
⫺ t)
. (7.13)
The result is valid if x is nonzero between time t
0
and t.Thusx(t)musthavethe
same sign (positive or negative) as x(t
0
).
When x
0
⫽ 0(orwhenx ⫽ 0 at any time), the unique solution is the
equilibrium x ⬅ 0, which is defined for all t. When x
0
⫽ 0, the solution is not
defined if the denominator 1 ⫹ x
0
(t
0
⫺ t) is 0. In this case, let t
⬁
⫽ t
0
⫹ 1 x
0
; t
⬁
is
the solution of 1 ⫹ x
0
(t
0
⫺ t) ⫽ 0. Then lim
t→t
⬁
x(t) ⫽
⬁
. For x
0
⫽ 0, therefore,
the solution x(t) exists only for t in the interval (⫺
⬁
,t
⬁
)or(t
⬁
,
⬁
), whichever
contains t
0
.
282
7.2 ONE-DIMENSIONAL N ONLINEAR D IFFERENTIAL E QUATIONS
x
t
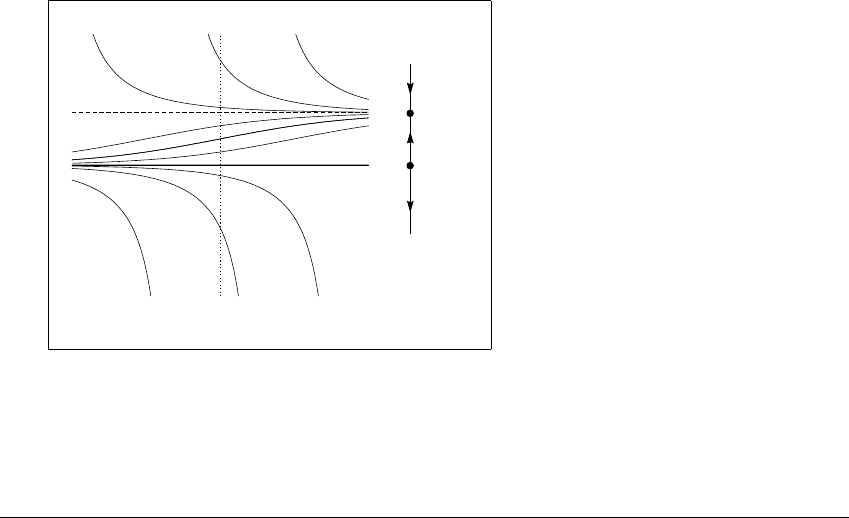
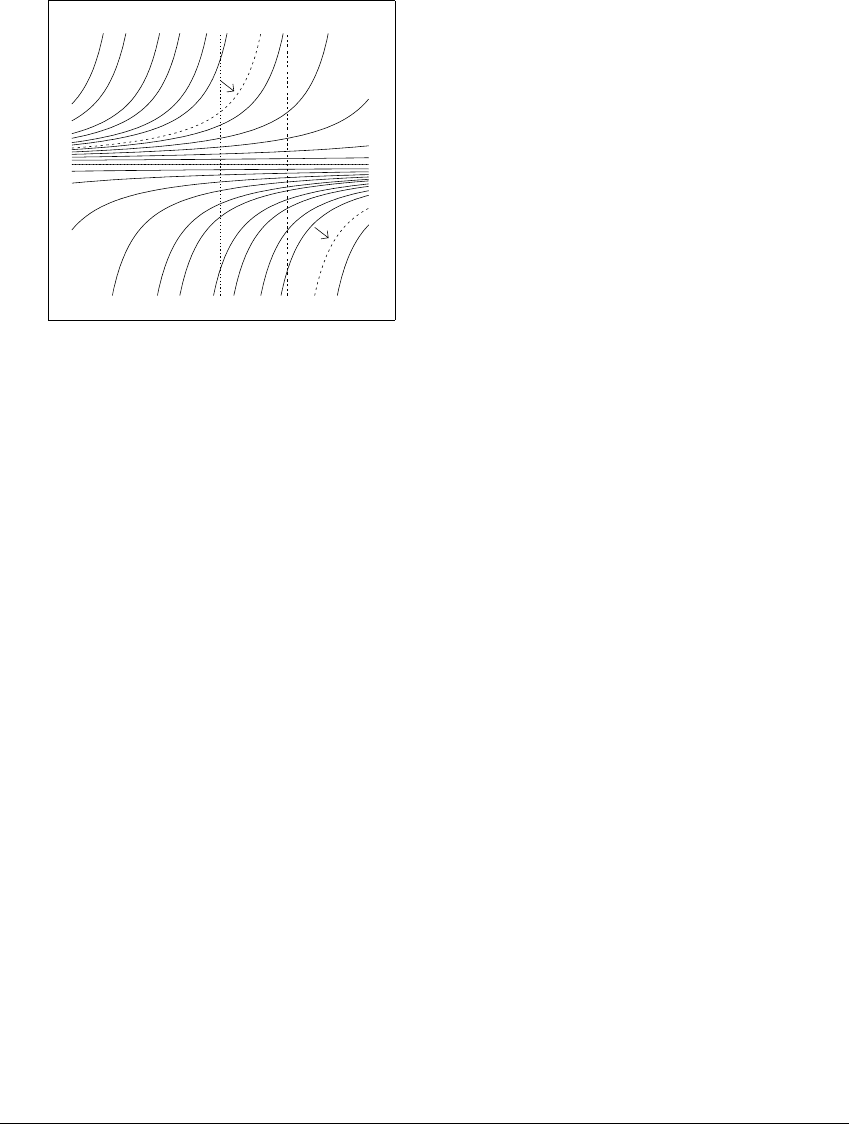
Figure 7.5 Solutions that blow up in finite time.
Curves shown are solutions of the equation
˙
x ⫽ x
2
. The dashed curve in the upper
left is the solution with initial value x(0) ⫽ 1. This solution is x(t) ⫽ 1 (1 ⫺ t),
which has a vertical asymptote at x ⫽ 1, shown as a dashed vertical line on the
right. The dashed curve at lower right is also a branch of x(t) ⫽ 1 (1 ⫺ t), one that
cannot be reached from initial condition x(0) ⫽ 1.
The solution curves of (7.10) are shown in Figure 7.5. The constant x ⬅ 0is
an equilibrium. All curves above the horizontal t-axis blow up at a finite value of
t; all curves below the axis approach the equilibrium solution x ⬅ 0. For example,
if t
0
⫽ 0andx
0
⫽ 1, then t
⬁
⫽ 1, and the solution x(t) ⫽ 1 (1 ⫺ t) exists on
(⫺
⬁
, 1). This solution is the dashed curve in the upper left of Figure 7.5. Equation
(7.13) seems to suggest that the solution continues to be defined on (1,
⬁
), but
as a practical matter, the solution of the initial value problem with x(0) ⫽ x
0
no
longer exists for t beyond the point where x(t)goesto
⬁
.
In general, notice that the solution (7.13) has 2 branches. In Figure 7.5,
arrows point to the 2 dashed branches of x(t) ⫽ 1 (1 ⫺ t). Only the branch with
x(t)andx
0
having the same sign is valid for the initial value problem with x
0
⫽ 1.
The other branch is spurious as far as the initial value problem is concerned, since
(7.12) fails to make sense when x(t
0
)andx(t) have opposite signs.
Solutions that blow up in finite time are of considerable interest in mathe-
matical modeling. When a solution reaches a vertical asymptote, the time interval
over which the differential equation is valid has reached an end. Either the model
needs to be refined to better reflect the properties of the system being modeled,
or the system itself has a serious problem!
283
D IFFERENTIAL E QUATIONS
➮ COMPUTER EXPERIMENT 7.1
To do the Computer Experiments in the next few chapters, you may need to
read Appendix B, an introduction to numerical solution methods for differential
equations. A good practice problem is to choose some version of the Runge-
Kutta algorithm described there and plot solutions of the differential equations
of Figures 7.1, 7.3 and 7.5.
7.3 LINEAR DIFFERENTIAL EQUATIONS IN
MORE THAN ONE DIMENSION
So far we have discussed first-order equations with one dependent variable. Now
we move on to more dependent variables, beginning with a system of two linear
equations. The solution of the system
˙
x ⫽ 2x
˙
y ⫽⫺3y (7.14)
can be determined by solving each equation separately. For an initial point (x
0
,y
0
)
at time t ⫽ 0, the solution at time t is the vector (x
0
e
2t
,y
0
e
⫺3t
).
Figure 7.6 shows a graphical representation of the vector field of (7.14). A
vector field on ⺢
n
is a function that assigns to each point in ⺢
n
an n-dimensional
vector. In the case of a differential equation, the coordinates of the vector assigned
to point (x, y) are determined by evaluating the right side of the equation at (x, y).
For (7.14), the vector (2x, ⫺3y) is placed at the point (x, y), as seen in Figure
7.6(a). As in the case of slope fields, these vectors are tangent to the solutions.
Thus the vector (2x, ⫺3y) gives the direction the solution moves when it is at
the point (x, y). The length |(2x, ⫺3y)| of the vector is the speed of the solution
as it moves through the point.
Since (7.14) is autonomous, (the variable t does not appear explicitly on
the right side of (7.14)), the vector assigned to (x, y) is independent of time.
A solution passing through (x, y)atonetimet will not go a different direction
or speed when passing through (x, y) at a different time. Autonomous equations
have a particularly useful property that enables us to draw phase portraits for these
systems: graphs of solutions (x(t),y(t)) drawn in the xy-plane, ignoring the t-axis,
do not cross. (This property holds in addition to the fact that they do not cross in
(x, y, t)–space, which is a consequence of uniqueness of solutions.) Figure 7.6(b)
284
7.3 LINEAR D IFFERENTIAL E QUATIONS IN M ORE THAN O NE D IMENSION
y
x
y
x
(a) (b)
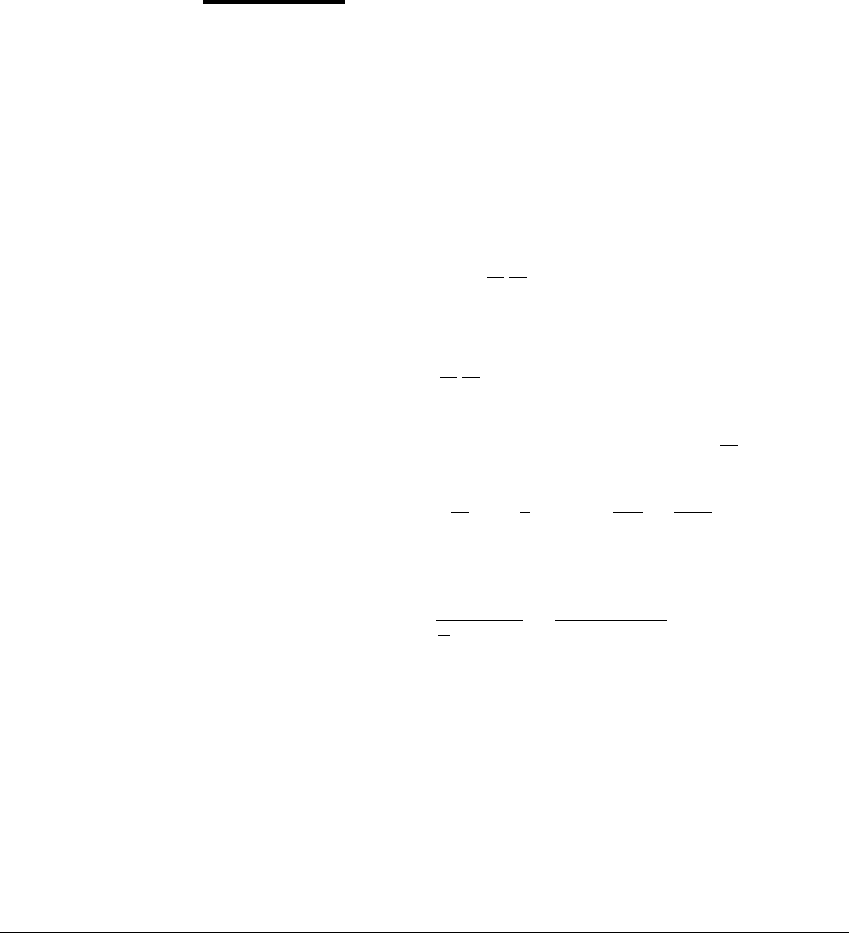
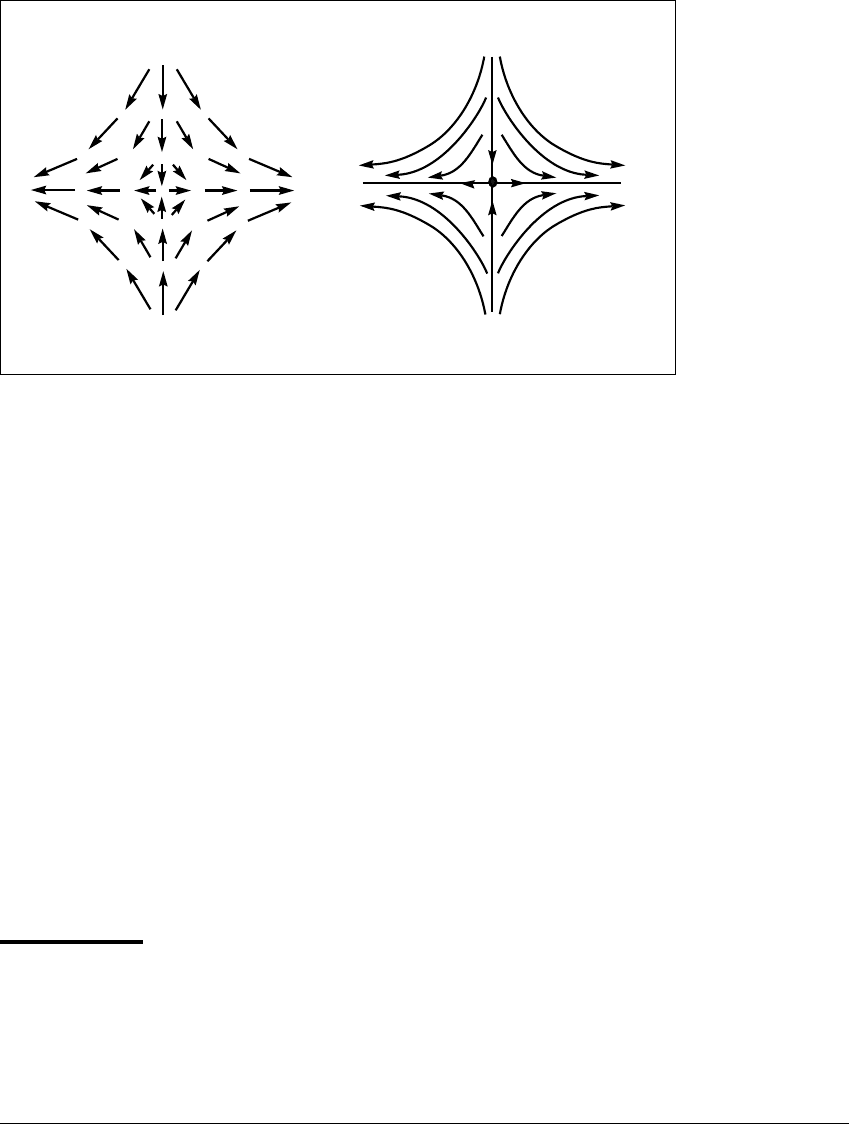
Figure 7.6 Vector field and phase plane for a saddle equilibrium.
(a) The vector field shows the vector (
˙
x,
˙
y) at each point (x, y) for (7.14). (b) The
phase portrait, or phase plane, shows the behavior of solutions. The equilibrium
(x, y) ⬅ (0, 0) is a saddle. The time coordinate is suppressed in a phase portrait.
shows the phase portrait of solutions of (7.14). A phase portrait in two dimensions
is often called a phase plane, and in higher dimensions it is called phase space.
The dimension of the phase space is the number of dependent variables. Arrows
on the solution curves in phase space indicate the direction of increasing time.
The system (7.14) is uncoupled, meaning that neither of the dependent
variables appear in the other’s equation. More generally, the equation has the
form
˙v ⫽ Av, (7.15)
where v is a vector of variables, and A is a square matrix. Since the right-hand
side of (7.15) is the zero vector when v ⫽ 0, the origin is an equilibrium for
(7.15). The stability of the equilibrium can be determined by the eigenvalues of
the matrix of coefficients.
E XAMPLE 7.5
We show how eigenvalues are used to find the solution v ⫽ (x, y)of
˙
x ⫽⫺4x ⫺ 3y
˙
y ⫽ 2x ⫹ 3y (7.16)
285
D IFFERENTIAL E QUATIONS
with initial value v(0) ⫽ (1, 1). In vector form, (7.16) is given by (7.15) where
v ⫽
x
y
and A ⫽
⫺4 ⫺3
23
.
The eigenvalues of the matrix A are 2 and ⫺3. Corresponding eigenvectors
of A are (1, ⫺2) and (3, ⫺1), respectively. We refer the reader to Appendix A
for fundamentals of eigenvalues and eigenvectors.
For a real eigenvalue
of A, an associated eigenvector u has the prop-
erty that Au ⫽
u. Set v(t) ⫽ e
t
u. By definition of eigenvector, Av (t) ⫽
e
t
Au ⫽ e
t
(
u). Since u is a fixed vector, ˙v(t) ⫽
e
t
u as well. Each eigenvalue-
eigenvector pair of A leads to a solution of ˙v ⫽ Av. As the phase plane in
Figure 7.7 shows, any vector along the line determined by an eigenvector u is
stretched or contracted as t increases, depending on whether the corresponding
eigenvalue
is positive or negative. The phase plane of (7.16) is similar to that
of (7.14) except that lines in the direction of the eigenvectors u
1
⫽ (1, ⫺2) and
u
2
⫽ (3, ⫺1) take the place of the x and y axes, respectively. Both v(t) ⫽ e
1
t
u
1
and v(t) ⫽ e
2
t
u
2
are solutions.
If this vector argument is not clear, write the vectors in coordinates. Since
u
1
⫽ (1, ⫺2), the corresponding solution v(t) ⫽ (x(t),y(t)) is (1e
1
t
, ⫺2e
1
t
).
Differentiating each coordinate separately gives (1
1
e
1
t
, ⫺2
1
e
1
t
), which is
1
v(t), as needed. The same argument works for u
2
.When
1
⫽
2
, then u
1
and u
2
are linearly independent, and the general solution of ˙v ⫽ Av is given by
y
x
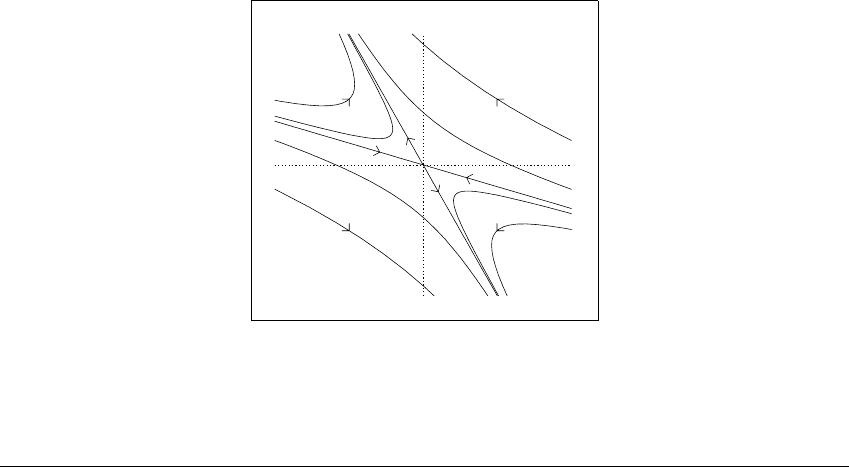
Figure 7.7 Phase plane for a saddle equilibrium.
For (7.16), the origin is an equilibrium. Except for two solutions that approach the
origin along the direction of the vector (3, ⫺1), solutions diverge toward infinity,
although not in finite time.
286