Baker K.R. Optimization Modeling with Spreadsheets
Подождите немного. Документ загружается.

Normally, the linear solver does not run on this model because of the presence of the
ABS function, which is nonsmooth. In the output window of the task pane, Solver’s
error message appears when an attempt is made to use the linear solver.
The linearity conditions required by
this Solver engine are not satisfied.
If we invoke the nonlinear solver, the GRG algorithm appears to run, but we can’t tell
whether its solution is a global optimum. In fact, if we use the solution in Figure 8.18
as the starting solution, the nonlinear solver generates the convergence message,
but the solution remains unchanged.
The linearized model requires pairs of auxiliary variables, u
k
and v
k
, correspond-
ing to each absolute value calculation. Those variables are defined by a constraint in
the form of equation (8.2).
Minimize z ¼
X
k
(u
k
v
k
)
subject to
X
k
x
kj
¼ 1 for j ¼ 1, 2, ...,8
X
j
a
kj
x
j
þ u
k
v
k
¼ 0 for k ¼ 1, ...,4
This is a linear program containing six pairs of auxiliary variables as well as the binary
variables.
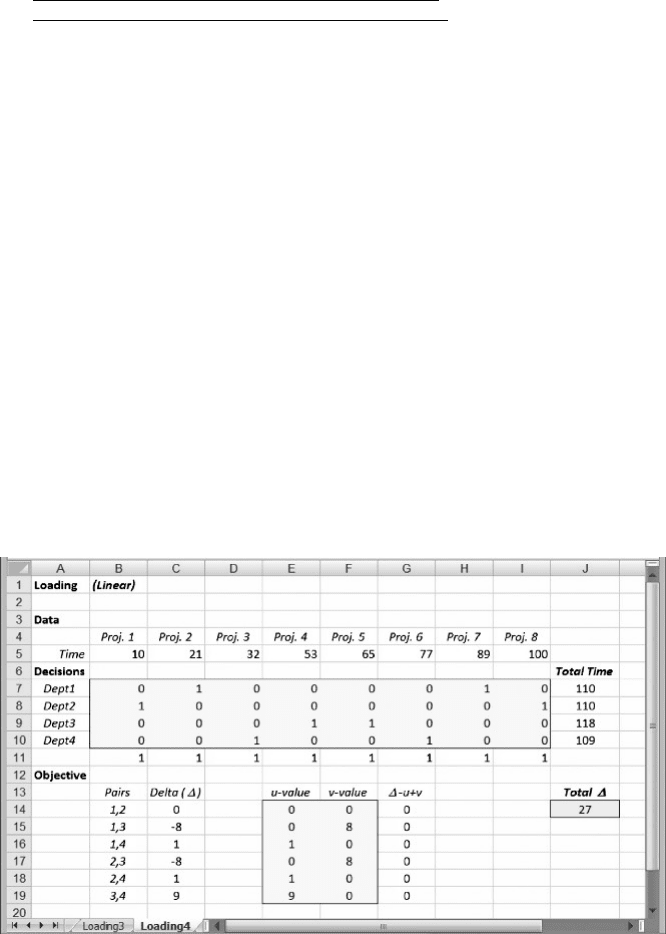
A worksheet for the linearized problem is shown in Figure 8.19. In the Objective
module, the auxiliary variables appear in cells E14:F19. The objective function
appears in cell J14 with the formula
¼ SUM(E14:F19).
Figure 8.19. Spreadsheet for Example 8.7 with absolute value objective.
326 Chapter 8 Nonlinear Programming
We specify the problem as follows.
Objective: J14 (minimize)
Variable: B7:I10
E14:F19
Constraints: B11:I11 ¼ 1
G14:G19 ¼ 0
B7:I10 ¼ binary
The linear solver produces a solution, which is shown in Figure 8.19, that achieves an
optimal value of 27. Although the objective is quite different than the minimax value
used earlier, the assignment of departments to projects is similar, and the maximum
workload remains minimal at 118. By linearizing the model, Armstrong can be sure
that it has found the optimal solution to its revised formulation.
Solver offers the capability of transforming the use of the ABS function automati-
cally. This transformation would be initiated if we set the Nonsmooth Model
Transformation option to Automatic (or to Always) on the Platform tab in the task
pane. This option is convenient because we can set up the model in an intuitive
fashion, even if it does not satisfy the linearity requirement, and Solver can compen-
sate by performing the necessary transformation. However, the transformation actually
implemented by Solver is not visible to the user, so it’s not possible to know precisely
how the model is transformed. For example, in the case of Example 8.7, the original
model contains 32 variables and 8 constraints. Our transformation, shown in
Figure 8.19, uses 44 variables and 14 constraints. Solver’s automatic transformation
uses 44 variables (38 of which are integer variables) and 44 constraints (not including
the objective function), as reported in the Current Problem section of the Engine tab.
Thus, the details of the automatic transformation may be a bit different than the manual
transformation, but the details of the automatic transformation are not made available
to the user.
SUMMARY
The default choice for a solution algorithm in Solver is the nonlinear solver, also known as the
GRG Nonlinear Engine. The nonlinear solver uses a steepest ascent strategy to search for an
optimal set of decision variables, and it can be invoked for any nonlinear or linear programming
problem. For linear programming problems, however, the linear solver is preferred because it is
numerically stable and produces a comprehensive sensitivity report. For nonlinear problems that
have smooth objective functions, the GRG algorithm is the best choice. Table 8.1 summarizes
the features of the two solution algorithms.
Although it is capable of solving both linear and nonlinear problems, the nonlinear solver
does have its limitations. In general, the GRG algorithm guarantees only that it will find a local
optimum. This solution may or may not be a global optimum. If the objective function is con-
cave or convex, and if the constraints form a convex set, then we can be sure that the nonlinear
solver produces a global optimum. Otherwise, we can try alternative starting points as a way of
marshalling evidence about optimality, but there is no foolproof scheme for identifying the
8.5. Linearizations
327
global optimum in general. Solver’s MultiStart option is often a powerful feature in trying to
solve problems with several local optima, but it does not provide any guarantees, either.
Another limitation concerns integer-valued variables. The presence of integer constraints
in an otherwise nonlinear model generally leaves us in a situation where the nonlinear solver
may fail to find a global optimum, even to a relaxed problem that is encountered during
Solver’s implementation of branch and bound. This feature renders the GRG algorithm unreli-
able (in the sense of producing a guaranteed global optimum), and the implication is that we
should avoid trying to solve integer nonlinear programming problems with Solver.
Fortunately, in some practical cases, we can transform the most natural formulation into a
linear model. With the transformation, an integer-valued problem can be solved reliably with
the linear solver augmented by the branch and bound procedure. For models that contain
Excel’s MAX, ABS, or IF functions, Solver’s Nonsmooth Model Transformation option can
often provide the linear equivalent of a nonsmooth formulation, although the details of the
model it builds remain opaque.
Finally, because the nonlinear solver is applicable to such a wide variety of optimization
problems (and therefore must accommodate exponents, products, and special functions) we
know of no standard layout that conveniently captures the necessary calculations in the context
of spreadsheets. This feature stands in contrast to the use of the linear solver, where one standard
layout could, in principle, always be used. (Nevertheless, as we have seen in Chapters 3–6, there
are sometimes good reasons for using a few non-standard variations.) The most useful guideline,
as with all spreadsheet models, still seems to be to modularize the spreadsheet and thereby sep-
arate objective function, decision variables, and constraints.
EXERCISES
8.1. Merrill Sporting Goods (Revisited) Revisit Example 8.4, in which the criterion gives
equal weight to each of the retail sites. But in practice, there will be different levels of traf-
fic between the warehouse and the various sites. One way to incorporate this consideration
Table 8.1. Comparison of the Linear and Nonlinear Algorithms
Linear solver Nonlinear solver
Suitable for linear models Suitable for nonlinear models;
can also solve most linear models.
Finds a global optimum each time Finds a local optimum each time.
No guarantee of global optimum,
except in special circumstances.
Ignores initial decision variables Uses initial decision variables in search;
result may depend on starting values.
Finds a feasible solution if one exists May not be able to find a feasible
solution when one exists.
Always leads to an optimum, unless
problem is infeasible or unbounded
May generate “convergence” message;
a re-run may be necessary.
Comprehensive sensitivity information
from the Sensitivity Report
Sensitivity Report does not include
allowable ranges.
328 Chapter 8 Nonlinear Programming
is to estimate the number of trips between the warehouse and each retail site and then
weight the distances by the trip volumes. Thus, the original data set has been augmented
with volume data (v
k
), as listed in the table below.
Site (k) x
k
y
k
v
k
1 9 29 12
2 5 50 15
3266820
4397912
541548
6385916
763618
8525820
9817612
10 95 93 24
Now we can use as a criterion the weighted sum of distances between the warehouse and
the retail sites.
(a) What location is optimal for the weighted version of the criterion?
(b) How much of an improvement is achieved by the solution in (a) over the optimal
location for the unweighted version (39.59, 58.43)?
8.2. Curve Fitting for Revenues A large food chain owns a number of pharmacies that
operate in a variety of settings. Some are situated in small towns and are open for only
eight hours a day, five days per week. Others are located in shopping malls and are
open for longer hours. The analysts on the corporate staff would like to develop a
model to show how a store’s revenues depend on the number of hours that it is open.
They have collected the following information from a sample of stores.
Hours of
operation
Average
revenue
40 $5958
44 6662
48 6004
48 6011
60 7250
70 8632
72 6964
90 11,097
100 9107
168 11,498
(a) Use a linear function to represent the relationship between revenue and operating
hours and find the values of the parameters that provide the best fit to the given
data. What revenue does your model predict for 120 hours?
Exercises
329
(b) Suggest a two-parameter nonlinear model for the same relationship and find the par-
ameters that provide the best fit. What revenue does your model predict for 120
hours? Which of the models in (a) and (b) do you prefer and why?
8.3. Curve Fitting for Costs Newton Manufacturing Company has reached a stable volume
in the last couple of years and is interested in developing a planning model for its pro-
duction levels, based on aggregate units of output. One element will be a cost model
that describes the relationship of unit cost to production volume. Newton’s capacity is
thought to be around 2500 aggregate units at current equipment and labor force levels,
and it is well known that unit costs tend to rise when output volumes are significantly
above or below this figure. For volumes above this figure, costs rise due to overtime pre-
miums and to high congestion levels in the plant. For volumes below the nominal figure,
costs rise due to inefficiencies in production. Analysts at Newton have therefore decided
that some type of quadratic function would be a suitable model for unit costs, and they
have proposed the form ax
2
þ bx þ c, where x represents the aggregate number of
output units, and the parameters a, b, and c remain to be determined. For this purpose,
the model will be fit as closely as possible to the last 12 months of observed data, as repro-
duced in the table below.
Month
Aggregate
output
Unit
cost
1 2350 $53.35
2 2200 54.60
3 2450 49.62
4 2600 53.62
5 2550 49.69
6 2400 51.18
7 2300 53.25
8 2650 51.91
9 2700 54.23
10 2750 50.06
11 2500 49.08
12 2250 54.46
(a) What values of the three parameters provide the best fit to the data, as measured by the
minimum sum of squared differences?
(b) What does the model in (a) predict as the unit cost for an output of 2500?
8.4. Economic Order Quantity (EOQ) A distributor of small appliances wishes to calcu-
late the optimal order quantity for replenishing its stock of a particular washing machine.
Demand for the $200 machine is stable throughout the year and averages about 1000 units
annually. Each order involvesthe cost of transportation, receiving and inspection, account-
ing for expenses of $500 per order. Holding costs are figured at 20 percent per year.
(a) What order quantity minimizes the annual replenishment cost?
(b) How does the optimal cost break down into holding and carrying components?
8.5. EOQ for Multiple Products In another location, the distributor of the previous pro-
blem stocks four different items in common warehouse space. Each item is described
330 Chapter 8 Nonlinear Programming
by an annual demand rate, a fixed cost per order, a holding cost per year, a unit purchase
cost and a space requirement. The data in the following table describe the four products.
Item 1 2 3 4
Demand 5000 10,000 30,000 300
Fixed cost 400 700 100 250
Holding cost 50 25 8 100
Purchase cost 500 250 80 1000
Space (sq. ft) 12 25 5 10
(a) Considering each product separately, as if it were independent from the others, what
are the respective economic order quantities? What is the total annual cost of order-
ing, holding, and purchasing across the four products at these order quantities?
(b) What is the minimum total annual cost for the four products if the average space taken
up must be no more than 12,000 square feet?
(c) What is the minimum total annual cost for the four products if the average space taken
up must be no more than 12,000 square feet and the number of orders per year must be
no more than 65?
(d) In part (b), with a square-foot limit on storage space, what is the economic value of
more space?
(e) In part (c), what is the economic value of more space?
8.6. Pricing with Dependent Demands Covington Motors is a car dealership that special-
izes in the sales of sport utility vehicles and station wagons. Due to its reputation for qual-
ity and service, Covington has a strong position in the regional market, but demand is
somewhat sensitive to price. After examining the new models, Covington’s marketing
consultant has come up with the following demand curves.
Truck demand ¼ 400 0:014 (truck price)
Wagon demand ¼ 425 0:018 (wagon price)
The dealership’s unit costs are $17,000 for SUVs and $14,000 for wagons. Each SUV
requires 2 hours of prep labor, and each wagon requires 3 hours of prep labor. The current
staff can supply 320 hours of labor.
(a) Determine the profit-maximizing prices for SUVs and Wagons. (Round off any frac-
tional demands.)
(b) What demand levels will result from the prices in (a)?
(c) What is the marginal value of dealer prep labor?
8.7. Pricing with Interdependent Demands Covington Motors sells sport utility vehicles
and station wagons in a price-sensitive market. Its marketing consultant has rethought the
simple demand curves first proposed (in the previous exercise) and now wants to recog-
nize the interaction of the two markets. This gives rise to a revised pair of demand curves
for SUVs and wagons, as shown below.
SUV demand ¼ 300 0:014 (SUV price) þ 0:003 (wagon price)
Wagon demand ¼ 325 0:018 (wagon price) þ 0:005 (SUV price)
Exercises
331
The dealership’s unit costs are $17,000 and $14,000 per unit, respectively. Each
SUV requires 2 hours of prep labor, and each Wagon requires 3 hours of prep labor.
The current staff can supply 320 hours of labor. Covington Motors wants to maximize
its profits from the SUVs and Wagons that it acquires for its stock.
(a) Determine the profit-maximizing prices for SUVs and Wagons. (Ignore the fact that
these prices may induce fractional demands.)
(b) What sales levels will result from the prices in (a)?
(c) What is the marginal value of dealer prep labor?
8.8. Allocating an Advertising Budget A regional beer distributor has $125,000 to spend
on advertising in four markets, where each market responds differently to advertising.
Based on observations of the market’s response to several advertising initiatives, the dis-
tributor has estimated the sales response by fitting a curve of the form R ¼ ax
b
, where R
represents sales revenue and x represents advertising dollars, both measured in thousands.
The estimated demand curves are shown in the table below.
Market Sales revenue
Domestic 66x
0.55
Premium 77x
0.44
Light 88x
0.33
Microbrew 99x
0.22
(a) How should the funds be allocated among the four markets so that the revenue to the
company as a whole will be maximized?
(b) How much would it be worth (in terms of incremental revenue) to raise the amount
available for advertising by $1000?
8.9. Supply Chain Design Muslin Office Furniture manufactures a popular line of filing
cabinets and has a very strong competitive position in its market. The company sells its
product to a number of wholesale distributors who, in turn, sell to retail customers. In
this environment, the company faces a demand curve of the following form
Q
1
¼ 20 0:6P
1
where P
1
denotes its selling price and Q
1
denotes the volume (in thousands) sold at that
price. Muslin also experiences increasing marginal costs of the form 0.8Q
1
. (This means
that its total cost is 0.8(Q
1
)
2
/2.) Increasing marginal costs occur because of quality losses
and congestion on the shop floor as volume rises.
One of Muslin’s distributors is a subsidiary known as New England Supply. They
represent Muslin’s exclusive distributor in the northeast, and the parent company
allows them to operate as an independent entity, focused on distribution. They buy
filing cabinets from Muslin and sell them to retail customers in the northeast. In that
market, New England Supply faces its own demand curve as follows
Q
2
¼ 10 0:2P
2
where P
2
denotes the retail selling price and Q
2
denotes the volume (in thousands) sold in
the northeast at that price. New England Supply incurs its own operating costs, in addition
332 Chapter 8 Nonlinear Programming
to the cost of purchasing the product from Muslin, so that its marginal cost function takes
the form P
1
þ 0.4Q
2
. This means that its total cost is P
1
Q
2
þ 0.4(Q
2
)
2
/2.
(a) Suppose that Muslin Office Furniture and New England Supply each analyze their
own pricing strategies separately. That is, Muslin finds its profit-maximizing price.
Then New England Supply, whose cost is influenced by Muslin’s price, maximizes
its own profits. What is each firm’s optimal price and how much profit is earned
between the two companies?
(b) Suppose instead that the two firms make coordinated decisions. In other words, they
choose a pair of prices, one wholesale and one retail, aimed at maximizing the total
profit between the two firms. What is each firm’s optimal price in this coordinated
environment? How much profit is earned between the two companies?
8.10. Estimating Beta In finance it is important to be able to predict the return on a stock
from the return on the market, that is, on a market index such as the S&P 500 index. It
is often hypothesized that a particular prediction equation exists
y ¼
a
þ
b
x
where y is the return on a stock during a time period, x is the return on the market index
during the same time period, and
a
and
b
are constants that must be estimated. The value
of
b
is of particular interest, because it indicates how closely the returns on a particular
stock tend to follow the returns on the market as a whole.
If our knowledge of the parameters
a
and
b
were perfect, then we could predict indi-
vidual stock returns accurately from the behavior of the market. Typically, such knowl-
edge does not exist, and our values of
a
and
b
are imperfect. In other words, when we
use them, we encounter errors in our predictions. The best we can do is to choose the esti-
mates
a
and
b
in order to make prediction errors close to zero.
Find data on returns for Coca-Cola stock on a monthly basis for the period January 2,
2001 to December 1, 2006, and returns for the S&P 500 index for the same 72 months. Fit
the linear prediction equation to this set of data. Use as a criterion the minimum sum of
squared differences between the actual stock returns and their predicted values. For the
historical data, estimate the parameters of the prediction equation for Coca-Cola stock.
(a) What is the estimated value of
b
, for Coca-Cola stock?
(b) Repeat the estimation process for Microsoft stock. What do you expect to find in
terms of the relationship between the
b
for Microsoft and the
b
for Coke?
8.11. Portfolio Model The information on which stocks are evaluated is a series of historical
returns, typically compiled on a monthly basis. This history provides an empirical distri-
bution of a stock’s return performance. For stock k in the portfolio, the table below sum-
marizes the monthly returns for five stocks over a two-year period in the late 1990’s.
Stock Mean
National Computer (NCO) 0.0371
National Chemical (NCH) 0.0145
National Power (NPW) 0.0118
National Auto (NAU) 0.0185
National Electronics (NEL) 0.0217
In addition, the covariance values for the five stocks are displayed in the following table.
Exercises
333
NCO NCH NPW NAU NEL
NCO 0.0110 20.0004 0.0000 0.0019 0.0013
NCH 20.0004 0.0032 2 0.0002 0.0002 0.0003
NPW 0.0000 20.0002 0.0015 0.0007 20.0002
NAU 0.0019 0.0002 0.0007 0.0051 0.0008
NEL 0.0013 0.0003 20.0002 0.0008 0.0044
(a) Determine the portfolio allocation that minimizes risk (i.e., portfolio variance) for a
portfolio consisting of these five stocks, subject to maintaining an average return of at
least two percent. What is the minimum variance?
(b) Determine the portfolio allocation that maximizes return for a portfolio consisting of
these five stocks, subject to maintaining a variance of at most 0.002. What is the opti-
mal return?
(c) Suppose an investor prefers an objective function that combines return and risk, as in
the following
Objective ¼ Return 2(Risk)
(d) What is the optimal allocation for this measure of performance?
8.12. Production Smoothing A supplier of raw material has made plans to provide monthly
deliveries to a customer. The customer’s requirements are shown in the following table.
Month 1 2 3 4 5 6 7 8
Units 100 200 300 400 100 100 500 300
The raw material can be processed and prepared for delivery in any volume because part-
time labor can be used, and the labor pool is quite large. However, changes in month-to-
month production volumes can be costly. When production levels increase, costs must be
incurred in acquiring and training new workers. When production levels decrease, costs
are incurred due to layoff policies.
Based on historical data, the cost estimate for increasing production from one month
to the next is $1.50 per unit increase in capacity. In the other direction, reducing pro-
duction from one month to the next incurs a cost of $1.00 per unit reduction in capacity.
The other relevant cost is the cost of inventory: each unit held in stock incurs a cost of
$2.00 per month held.
Entering month 1, the starting inventory is 80 units, and the production level has
been steady at 100 units. To make sure the plans can be extended into the future, inventory
is required to be at least 50 units at the end of the eighth month, and the planned pro-
duction level for month 9 is 200.
What is a minimum-cost production plan for the supplier?
8.13. Political Redistricting Based on the new census information, it is time to redraw the
boundaries of the political districts in the state of Idazona. Each district will have one
representative in the next Congress, and Idazona has been allocated four representatives
based on its share of the national population. The state is made up of nine counties, with
populations (in thousands) shown in the table. (See the state map in Figure 8.20.)
The main requirement in the formation of districts is that they produce equal popu-
lations, or as close to equal as possible. Furthermore, the districts must be composed of
334 Chapter 8 Nonlinear Programming
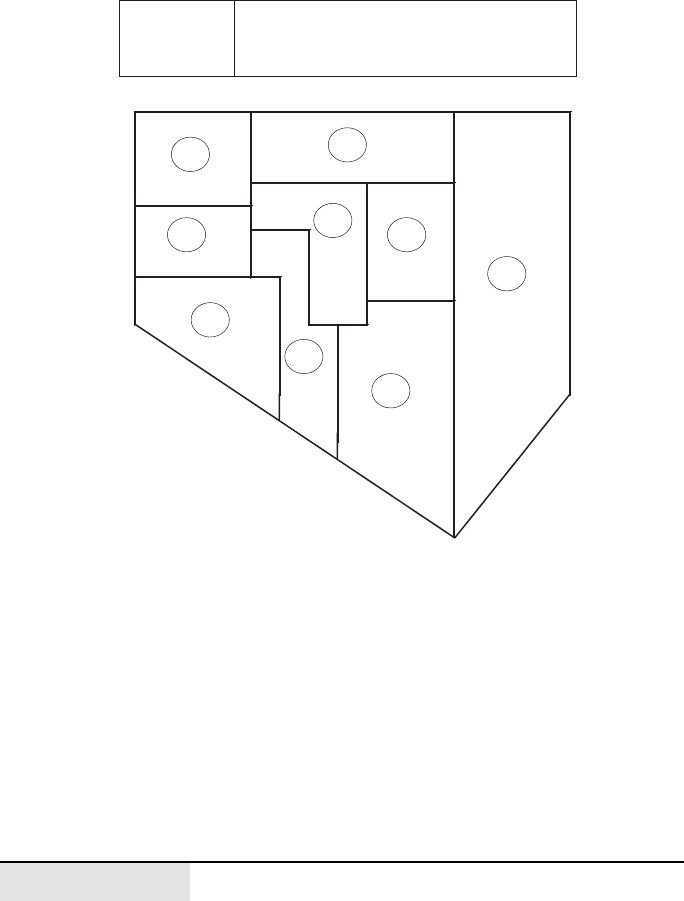
adjacent counties without splitting any county between two or more districts. Officials in
Idazona interpret the requirement to mean that if a district is created from two counties,
then those two counties must share a border. Furthermore, if a district is created from
three counties, then at least one of the counties must be adjacent to the other two. No dis-
trict is permitted to have exactly one county or more than three counties.
Mathematically, officials are seeking a districting plan for which the maximum
deviation between a district population and the average district population will be as
small as possible.
What assignment of counties to districts will satisfy the desired conditions?
Case: Delhi Foods
Manisha Patel recently completed her first week of work as a summer intern at Delhi Foods.
Earlier this morning, Manisha’s boss, the Director of Marketing, asked her to come up with a
recommendation on the level of marketing expenses (advertising and promotion expenditures)
for a line of frozen Indian dinners as it enters its seventh year in the marketplace. Exhibit 8.1,
which Manisha received from her boss, contains an accounting summary of essential product
costs and revenues in the first six years, during which there has been some trial-and-error exper-
imentation with marketing policies. For year seven, the table shows projections for the coming
County 1 2 3 4 5 6 7 8 9
Population 25 23 29 20 22 37 34 21 34
1
2
3
4
5
6
7
8
9
Figure 8.20. State map of ldazona.
Case: Delhi Foods 335