Balakumar Balachandran, Magrab E.B. Vibrations
Подождите немного. Документ загружается.

The constants A and B are determined from the expressions for the
displacement at X
0
and X
N
. At n 0, X
0
0 and, therefore, from Eqs. (g),
A 0. From Eq. (c) and the fact that X
N1
0, we find that
(h)
Upon using Eq. (f) and Eqs. (g) with A 0, Eq. (h) becomes
(i)
After employing several trigonometric identities, Eq. (i) can be written as
(k)
We see that this equation is satisfied when
(l)
If we ignore the trivial value l 0, the values of b obtained from Eq. (l) and
Eq. (f) lead to
or, from Eq. (d), that
(m)
The corresponding mode shapes are determined by using Eq. (g) with
A 0 and Eq. (l); thus,
where B
l
is an arbitrary constant, the subscript l indicates the lth natural fre-
quency, and n indicates the displacement of the nth mass.
If we let N 4, then the four natural frequencies are
(n)
v
4
2v
o
sin a
4p
10
b 1.9021v
o
v
3
2v
o
sin a
3p
10
b 1.6180v
o
v
2
2v
o
sin a
2p
10
b 1.1756v
o
v
1
2v
o
sin a
p
10
b 0.6190v
o
X
nl
B
l
sin a
nlp
N 1
b
n 1,2, . . ., N
l 1,2, . . ., N
v
l
2v
o
sin a
lp
21N 1 2
b
l 1, 2, . . ., N
2
4sin
2
a
lp
21N 1 2
b
l 1, 2, . . ., N
b
lp
N 1
l 0,1, . . ., N
sin1b1N 122 0
12 211 cos b 22sin1bN 2 sin1b 3N 142
12
2
2X
N
X
N1
390 CHAPTER 7 Multiple Degree-of-Freedom Systems
and the corresponding matrix of modal vectors is
(o)
where the first column corresponds to the first mode and so on.
These numerical results also can be obtained from Eqs. (7.5a) and (7.5b).
In the present notation and with the assumptions stated above, these equations
become
Then, the eigenvalues can be determined from
Evaluation of this determinant
23
for the chosen number of masses and springs
yields the same results as those obtained from Eqs. (m) and the same nor-
malized results as given by Eq. (o).
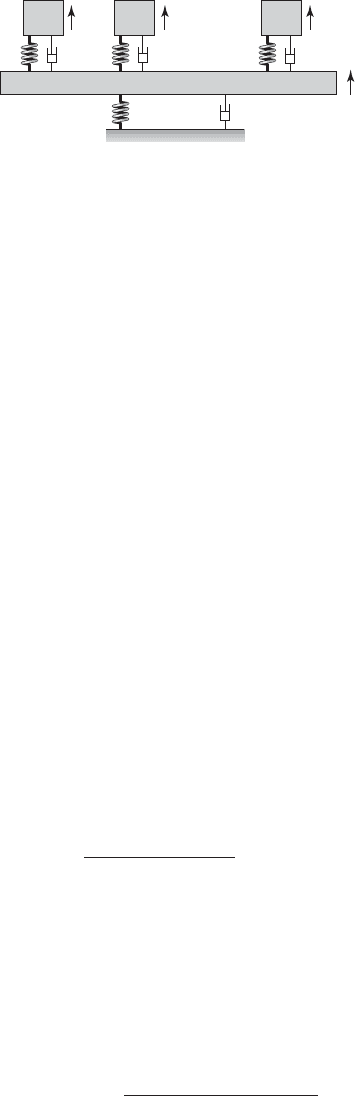
EXAMPLE 7.19
Single degree-of-freedom system carrying a system of oscillators
Consider the multiple degree-of-freedom system shown in Figure 7.20. The
kinetic energy, potential energy, and the dissipation function are, respectively,
(a)
where x
i
is the absolute displacement of mass m
i
and is the absolute veloc-
ity of mass m
i
. Upon substituting expressions (a) into the Lagrange equations
x
#
i
D 1x
#
1
, x
#
2
, . . ., x
#
n
2
1
2
c
1
x
#
2
1
1
2
a
N
n2
c
n
1x
#
1
x
#
n
2
2
V1x
1
, x
2
, . . ., x
n
2
1
2
k
1
x
2
1
1
2
a
N
n2
k
n
1x
1
x
n
2
2
T1x
#
1
, x
#
2
,. . ., x
#
n
2
1
2
m
1
x
#
2
1
1
2
a
N
n2
m
n
x
#
2
n
det3K
o
4
2
3M
o
40 0
3M 4 m3M
o
4 m D
1000
0100
0010
0001
T
3K 4 k3K
o
4 kD
2 100
1210
0 121
0012
T
£ D
0.5878 0.9511 0.9511 0.5878
0.9511 0.5878 0.5878 0.9511
0.9511 0.5878 0.5878 0.9511
0.5878 0.9511 0.9511 0.5878
T
7.3 Free Response Characteristics 391
23
The MATLAB function eig was used.
with q
n
x
n
and Q
n
0, n 1, 2, . . ., N, and performing the needed opera-
tions, we obtain
(b)
In order to determine the natural frequency equation, we assume that
(c)
Upon substituting Eqs. (c) into Eqs. (b), we obtain
(d)
We notice that from the second to Nth equations in Eqs. (d), we can solve for
X
n
, n 2, . . ., N in terms of X
1
. Thus,
(e)
Upon substituting Eqs. (e) into the first of Eqs. (d) and solving for X
1
,we
obtain
(f)
where
(g)H
n
1j2
11 j2z
n
v
1n
2
1 v
2
1n
2
j2z
n
v
1n
n 2, 3, . . ., N
1
2
j2z
1
2
a
N
n 2
1m
n
/m
1
2H
n
1j2 0
X
n
1jvc
n
k
n
2X
1
k
n
m
n
v
2
jvc
n
n 2, . . ., N
m
N
v
2
X
N
jvc
N
1X
1
X
N
2 k
N
1X
1
X
N
2 0
p
m
2
v
2
X
2
jvc
2
1X
1
X
2
2 k
2
1X
1
X
2
2 0
m
1
v
2
X
1
jc
1
vX
1
a
N
n2
jc
n
v1X
1
X
n
2 k
1
X
1
a
N
n2
k
n
1X
1
X
n
2 0
x
n
1t 2 X
n
e
jvt
n 1, 2, . . ., N
m
N
x
$
N
c
N
1x
#
1
x
#
N
2 k
N
1x
1
x
N
2 0
p
m
2
x
$
2
c
2
1x
#
1
x
#
2
2 k
2
1x
1
x
2
2 0
m
1
x
$
1
c
1
x
#
1
a
N
n2
c
n
1x
#
1
x
#
n
2 k
1
x
1
a
N
n2
k
n
1x
1
x
n
2 0
392 CHAPTER 7 Multiple Degree-of-Freedom Systems
m
2
k
2
c
2
m
3
k
3
c
3
m
N
k
N
c
N
m
1
k
1
c
1
x
1
x
N
x
3
x
2
. . .
FIGURE 7.20
A single degree-of-freedom system carrying a system of oscillators.

and
Referring to Eq. (5.82), we see that 0H
n
( j)0, n 2, . . ., N, is the ampli-
tude response of each of the single degree-of-freedom systems excited by a
moving base.
In the absence of damping; that is, when c
n
0, n 1, 2, . . ., N, we use
Eq. (f) to find that the natural frequencies of the system are determined from
the solution to
(h)
In the special case where N 2, Eq. (h) becomes
(i)
where m
r
and v
r
are given by Eq.(7.41). We see that Eq. (i) is the same as
Eq. (7.45), when k
32
0 in Eq. (7.45).
7.3.2 Undamped Systems: Properties of Mode Shapes
In this section, we examine the properties of the eigenvectors of undamped
systems described by Eq. (7.25), which, after setting l
2
v
2
,is
(7.55)
It is shown that the eigenvectors {X}
j
, and hence, the modal matrix , have
a special property called orthogonality, which will be described shortly. This
property follows from the properties of eigenvectors associated with real,
symmetric matrices. We shall take advantage of this orthogonality to solve the
coupled equations of the form given by Eq. (7.3) and other systems in the next
chapter. Another important property is that the eigenvectors {X}
j
form a lin-
early independent set. We address the orthogonality of the modes next, and
explain the linear independence of the modes at the end of this section.
Orthogonality of Modes
We see from Eq. (7.55) that
(7.56)
where the matrices and are symmetric and v
j
2
are the different eigen-
values and {X}
j
are the associated eigenvectors. We consider Eq. (7.56) for
two distinct frequencies v
l
and v
m
; thus, we have
(7.57)v
2
m
3M 45X6
m
3K 45x6
m
v
2
l
3M 45X6
l
3K 45X6
l
3K 43M 4
v
2
j
3M 45X6
j
3K 45X6
j
for
j 1, 2, . . ., N
3£ 4
33K4 v
2
3M 445X6 506
4
11 v
2
r
11 m
r
22
2
v
2
r
0
1
2
c1
a
N
n2
m
n
m
1
11 v
2
1n
2
2
d 0
v
n
B
k
n
m
n
,
2z
n
c
n
v
n
m
n
,
v
v
1
,
v
1n
v
1
v
n
7.3 Free Response Characteristics 393
Pre-multiplying the first equation of Eqs. (7.57) by {X}
T
m
and the second equa-
tion of Eqs. (7.57) by {X}
l
T
leads to
(7.58)
Taking the transpose
24
of the second equation of Eqs. (7.58), we find that
(7.59)
since we have assumed that and are symmetric matrices. Then, Eqs.
(7.58) and (7.59) lead to
(7.60)
On subtracting one equation from the other in Eqs. (7.60), we arrive at
(7.61)
Since v
l
v
m
, Eq. (7.61) implies that
(7.62)
Equation (7.62) provides a definition of orthogonality for the eigenvectors
(or eigenmodes or modes) of a system. Also, from Eqs. (7.60), it follows that
(7.63)
From Eqs. (7.62) and (7.63), we see that the modes are orthogonal with respect
to both the mass matrix and the stiffness matrix , and this important
property is one that we will make use of in the normal-mode approach for de-
termining responses of multiple degree-of-freedom systems in Section 8.2.
Equations (7.62) and (7.63) can be shown to be true for cases where the
eigenvalues are not distinct;
25
that is, when v
l
v
m
. Thus, in general, we know
(7.64)
where v
j
and the corresponding {X}
j
are obtained from the solutions to,
respectively,
(7.65)v
2
j
3M 45X6
j
3K 45X6
j
0
for
j 1, 2, . . ., N
det 3v
2
3M 4 3K44 0
5X6
T
l
3K 45X6
m
0
l m
5X6
T
l
3M 45X6
m
0
3K 43M 4
5X6
T
m
3K 45X6
l
0
for
v
l
v
m
5X6
T
m
3M 45X6
l
0
for
v
l
v
m
1v
2
l
v
2
m
25X6
T
m
3M 45X6
l
0
v
2
m
5X6
T
m
3M 45X6
l
5X6
T
m
3K 45X6
l
v
2
l
5X6
T
m
3M 45X6
l
5X6
T
m
3K 45X6
l
3K 43M 4
v
2
m
5X6
T
m
3M 45X6
l
5X6
T
m
3K 45X6
l
v
2
m
5X6
T
m
3M 4
T
5X6
l
5X6
T
m
3K 4
T
5X6
l
v
2
m
35X6
T
l
3M 45X6
m
4
T
35X6
T
l
3K 45X6
m
4
T
v
2
m
5X6
T
l
3M 45X6
m
5X6
T
l
3K 45X6
m
v
2
1
5X6
T
m
3M 45X6
l
5X6
T
m
3K 45X6
l
394 CHAPTER 7 Multiple Degree-of-Freedom Systems
24
From linear algebra, we know that See Appendix E.
25
D. C. Murdoch, Linear Algebra, John Wiley & Sons, NY, Chapter 6 (1970).
13A 43B 42
T
3B 4
T
3A 4
T
.
Modal Mass, Modal Stiffness, and Modal Matrix
After pre-multiplying each side of Eq. (7.56) with , we arrive at
(7.66)
where the modal mass of the jth mode and the modal stiffness of the
jth mode are given by, respectively,
(7.67)
By using Eqs. (7.31) for the modal matrix [] and taking advantage of
Eqs. (7.62) and (7.67), we see that
(7.68a)
and in a similar manner, by making use of Eqs. (7.63) and (7.67), we obtain
the diagonal matrix
(7.68b)
Therefore, Eqs. (7.66) can be written in matrix form as
(7.69a)3v
2
D
4 3M
D
4
1
3K
D
4
3v
2
D
43M
D
4 3K
D
4
3£ 4
T
3K 43£ 4 D
K
ˆ
11
0
p
0
0 K
ˆ
22
p
0
oo∞o
00
p
K
ˆ
NN
T 3K
D
4
D
M
ˆ
11
0
p
0
0 M
ˆ
22
p
0
oo∞o
00
p
M
ˆ
NN
T 3M
D
4
D
5X6
T
1
3M 45X6
1
5X6
T
1
3M 45X6
2
p
5X6
T
1
3M 45X6
N
5X6
T
2
3M 45X6
1
5X6
T
2
3M 45X6
2
p
5X6
T
2
3M 45X6
N
oo∞
5X6
T
N
3M 45X6
1
5X6
T
N
3M 45X6
2
p
5X6
T
N
3M 45X6
N
T
µ
5X 6
T
1
5X 6
T
2
o
5X 6
T
N
∂b3M45X6
1
3M 45X6
2
p
3M 45X6
N
r
3£ 4
T
3M 43£ 4 µ
5X 6
T
1
5X 6
T
2
o
5X6
T
N
∂3M4b5X6
1
5X6
2
p
5X6
N
r
K
ˆ
jj
5X6
T
j
3K 45X6
j
j 1, 2, . . ., N
M
ˆ
jj
5X6
T
j
3M 45X6
j
j 1, 2, . . ., N
K
ˆ
jj
M
ˆ
jj
v
2
j
K
ˆ
jj
/M
ˆ
jj
v
2
j
M
ˆ
jj
K
ˆ
jj
j 1, 2, . . ., N
v
2
j
5X6
T
j
3M 45X6
j
5X6
T
j
3K 45X6
j
5X6
T
j
7.3 Free Response Characteristics 395
which means that
(7.69b)
in agreement with Eqs. (7.66).
Mass-Normalized Modes
Equation (7.68a) can also be used for normalizing the mode shapes in lieu of
Eqs. (7.29) and (7.30) or Eq. (7.34). If one normalizes the mode shapes so that
for the first mode
(7.70a)
and for the second mode
(7.70b)
and so forth, then the mode shapes are said to be mass-normalized, and these
normalized mode shapes are also referred to as ortho-normal modes. In gen-
eral, for a system with N degrees of freedom, Eq. (7.62) together with Eqs.
(7.70a) and (7.70b) are expressed as
(7.71a)
where is the identity matrix. It follows from Eqs. (7.60) and (7.63) that
(7.71b)
We take advantage of the orthogonality of the modes in developing a solution
for the response of multiple degree-of-freedom systems in Section 8.2.
Linear Independence of Eigenvectors
We now consider the fact that the eigenvectors {X}
j
form a linearly inde-
pendent set. This means that for a system with N degrees of freedom with N
modes {X}
j
,any N-dimensional vector is constructed as a linear combination
of these eigenvectors. In physical terms, the implication is that any vibratory
3£ 4
T
3K 43£ 4 3v
2
D
4
3I 4
3£ 4
T
3M 43£ 4 3I 4
5X
21
X
22
p
X
2N
63M 4d
X
21
X
22
o
X
2N
t 1
5X
11
X
12
p
X
1N
63M 4d
X
11
X
12
o
X
1N
t 1
D
K
ˆ
11
/M
ˆ
11
0
p
0
0 K
ˆ
22
/M
ˆ
22
p
0
oo∞o
00
p
K
ˆ
NN
/M
ˆ
NN
T
D
v
2
1
0
p
0
0 v
2
2
p
0
oo∞o
00
p
v
2
N
T D
1/M
ˆ
11
0
p
0
01/M
ˆ
22
p
0
oo∞o
00
p
1/M
ˆ
NN
TD
K
ˆ
11
0
p
0
0 K
ˆ
22
p
0
oo∞o
00
p
K
ˆ
NN
T
396 CHAPTER 7 Multiple Degree-of-Freedom Systems

motion of a system is viewed as a weighted sum of oscillations in the indi-
vidual modes. This observation, along with the orthogonality of the modes,
forms the basis of the normal-mode approach discussed in Section 8.2. Math-
ematically, linear dependence of the eigenvectors means that
(7.72)
for non-zero constants C
j
. The orthogonality properties given by Eqs. (7.64)
is used to show that Eq. (7.72) is true only if the C
j
are all zero, thus verify-
ing that the eigenvectors are not linearly dependent, and hence, they form a
linearly independent set.
EXAMPLE 7.20
Orthogonality of modes, modal masses, and modal stiffness
of a spring-mass system
We now illustrate how the orthogonality of the modes of a vibratory system
is examined, and how the modal masses and modal stiffness are computed.
We consider the two degree-of-freedom system treated in Example 7.14
where m
1
1.2 kg, m
2
2.7 kg, k
1
10 N/m, k
2
20 N/m, and k
3
15 N/m. Then, from Eq. (7.38a)
(a)
Since the mass and stiffness matrices are real and symmetric matrices,
the modes will be orthogonal to the mass and stiffness matrices. We shall now
show this through numerical calculations. To this end, we recall the modal
matrix from Eq. (f ) of Example 7.14, which is
(b)
To check the orthogonality of the mode shapes, we note that
(c)
To determine the modal masses, we find that
(d)M
ˆ
22
5X6
T
2
3M 45X6
2
52.518 16
c
1.2 0
0 2.7
de
2.518
1
f 10.311
M
ˆ
11
5X6
T
1
3M 45X6
1
50.893 16
c
1.2 0
0 2.7
de
0.893
1
f 3.658
5X6
T
2
3K 45X6
1
5
2.518 1
6
c
30 20
20 35
de
0.893
1
f 0
5X6
T
2
3M 45X6
1
5
2.518 1
6
c
1.2 0
0 2.7
de
0.893
1
f 0
3£ 4 c
0.893 2.518
11
d
3£ 4
3M 4 c
1.2 0
0 2.7
d kg
and
3K 4 c
30 20
20 35
d N/m
C
1
5X6
1
C
2
5X6
2
p
C
n
5X6
n
506
7.3 Free Response Characteristics 397
and to determine the modal stiffness associated with each mode, we compute
(e)
In addition, to compare these results with the results provided in Example 7.14
for the natural frequencies, we carry out the following. From Eq. (7.69b) and
the computed quantities above, we find that
(f)
and
(g)
which agree with the values presented in Eq. (d) of Example 7.14.
7.3.3 Characteristics of Damped Systems
In Sections 7.3.1 and 7.3.2, we treated the natural frequencies and mode shapes
of undamped multi-degree-of-freedom systems with symmetric inertia and sym-
metric stiffness matrices. The eigenvalues and eigenvectors of such systems are
real-valued quantities with a physical interpretation. Here, we examine the
eigenvalues and eigenvectors for damped multiple degree-of-freedom systems.
We revisit Eq. (7.3), set the external forces to zero, replace q
i
by x
i
, and
arrive at
(7.73)
Since we have a linear system of ordinary differential equations with
constant coefficients, we can assume a solution of the form given by Eq.
(7.23a). On substituting Eq. (7.23a) into Eq. (7.73), the result is
(7.74)
Eigenvalue Problem
Noting that Eq. (7.74) should be satisfied for all time t, we arrive at
(7.75)
Although the trivial solution
(7.76)
satisfies Eq. (7.75), we are looking for nontrivial solutions of this system,
which has N algebraic equations in the (N 1) unknowns l, X
1
, X
2
, . . ., X
N
.
5X6 506
3l
2
3M 4 l13C4 3G42 3K4 3H 445X6 506
3l
2
3M 4 l13C4 3G42 3K4 3H 445X6e
lt
506
3M 45x
$
6 33C4 3G 445x
#
6 33K4 3H 445x6 506
c
v
1
0
0 v
2
d c
2.519 0
0 5.623
d
c
v
2
1
0
0 v
2
2
d c
6.345 0
0 31.618
d
3v
2
D
4 c
K
ˆ
11
/M
ˆ
11
0
0 K
ˆ
22
/M
ˆ
22
d c
23.21/3.658 0
0 326.01/10.311
d
K
ˆ
22
5X6
T
2
3K 45X6
2
5
2.51 1
6
c
30 20
20 35
de
2.518
1
f 326.01
K
ˆ
11
5X6
T
1
3K 45X6
1
50.893 1
6
c
30 20
20 35
de
0.893
1
f 23.209
398 CHAPTER 7 Multiple Degree-of-Freedom Systems
The special values of l for which we have a nontrivial solution are called
eigenvalues.
The eigenvalues of Eq. (7.75) are given by the roots of the characteristic
equation
(7.77)
which is a polynomial in l of order 2N. Since all of the matrices in Eq. (7.77)
are real-valued, we end up with 2N roots for this characteristic equation of the
N degree-of-freedom system. For mechanical systems known as lightly
damped systems, these roots are in the form of N complex conjugates pairs,
and they are given by
26
(7.78)
For systems that do not fall under the category of lightly damped systems, one
or more of the eigenvalues is real. The associated eigenvectors are determined
by solving the algebraic system
27
(7.79)
Damped Systems Without Gyroscopic and Circulatory Forces
For the cases where the gyroscopic and circulatory forces are absent, Eq.
(7.73) is of the form
(7.80)
Following the steps that were used to obtain Eqs. (7.77) and (7.79), the eigen-
values associated with Eq. (7.80) are given by the roots of
(7.81)
and they have the form of Eqs. (7.78). The corresponding eigenvectors are
determined from
(7.82)
Proportional Damping
28
For the case of proportional damping, the damping matrix is given by
(7.83)3C 4 a3M4 b3K4
3C 4
3l
2
k
3M 4 l
k
3C 4 3K445X6
k
506
k 1, 2, . . ., N
det 3l
2
3M 4 l3C4 3K 44 0
3M 45x
$
6 3C45x
#
6 3K45x6 506
3l
2
k
3M 4 l
k
13C4 3G 42 3K4 3H 445X6
k
506
k 1, 2, . . ., N
l
k
d
k
jv
k
k 1, 2 , . . ., N
det3l
2
3M 4 l13C4 3G42 3K4 3H 44 506
7.3 Free Response Characteristics 399
26
L. Meirovitch, 1980, ibid. and P. C. Müller and W. O. Schiehlen, Linear Vibrations: A Theo-
retical Treatment of Multi-Degree-of-Freedom Vibrating Systems, Martinus Nijhoff Publishers,
Dordrecht, The Netherlands, Chapters 4 and 6 (1985).
27
In Section 8.3, we shall see why the state-space form of Eq. (7.73) is convenient to use and to
interpret the eigenvalues given by Eqs. (7.78) and the eigenvectors determined from Eqs. (7.79).
28
In Sections 8.2 and 8.3, we shall use the normal-mode formulation and the state-space formu-
lation to interpret the eigenvalues given by Eqs. (7.78) and the eigenvectors determined from
Eqs. (7.82). While the state-space formulation is applicable to arbitrary forms of the damping ma-
trix , the normal mode approach is applicable only to systems with proportional damping.3C 4