Balakumar Balachandran, Magrab E.B. Vibrations
Подождите немного. Документ загружается.

where a and b are real-valued constants. Since, in Eq. (7.83), the damping
matrix is a combination of a matrix proportional to the mass matrix
and a matrix proportional to a stiffness matrix , we use the designation
proportional damping.
On substituting Eq. (7.83) into Eq. (7.81), we arrive at the eigenvalue
problem
(7.84)
which is rewritten in the form
(7.85)
Next, we compare the eigenvalues l
dk
of the proportionally damped system
with the eigenvalues l
k
of the undamped system determined from Eq. (7.25).
These eigenvalues are determined by the following characteristic equations
determined from Eq. (7.26) and Eq. (7.85), respectively.
Undamped system
(7.86)
Damped system
(7.87)
When the two characteristic polynomials given by Eqs. (7.86) and (7.87) are
compared, it is clear that l
dk
l
k
; that is, the eigenvalues for the proportion-
ally damped case are not the same as those for the undamped case. Since
and are real and symmetric matrices, the eigenvalues of the undamped
system are real and l
k
jv
k
, where v
k
are the system natural frequen-
cies. By contrast, the eigenvalues of the proportionally damped system are
complex-valued quantities.
To carry out a proper comparison of the eigenvectors of a damped system
with those of the corresponding undamped system, the state-space formula-
tion discussed in Section 8.3 is needed. From such a formulation, it can be es-
tablished that the eigenvectors of the proportionally damped system and the
eigenvectors of the associated undamped system have a similar structure; in
particular, the ratios of the modal components corresponding to the displace-
ment states are the same in the undamped and damped cases.
29
This informa-
tion will now be used to determine the relationship between l
dk
and l
k
.
Let {X}
k
be the eigenvector associated with the eigenvalue of the un-
damped system described by Eq. (7.25). Then, setting l l
dk
and {X}
{X}
k
in Eq. (7.85) we obtain
(7.88)
Pre-multiplying Eqs. (7.88) by {X}
T
k
, we arrive at
311 bl
dk
23K 4 l
dk
1l
dk
a23M 445X6
k
506
k 1, 2, . . ., N
l
2
k
l
2
dk
l
2
k
3M 4
3K 4
det 311 bl23K 4 l1l a23M 44 0
det 33K 4 l
2
3M 44 0
311 bl23K4 l1l a23M445X6 506
3l
2
3M 4 la3M4 bl3K4 3K 445X6 506
3K 4
3M 43C 4
400 CHAPTER 7 Multiple Degree-of-Freedom Systems
29
P. C. Müller and W. O. Schiehlen, ibid.
(7.89)
which, upon expanding the different terms, leads to
(7.90)
Making use of Eqs. (7.67) for the modal mass and the modal stiffness
in Eqs. (7.90), we find that
(7.91)
The natural frequency associated with the kth mode is given by Eqs. (7.66);
that is,
(7.92)
Then, Eqs. (7.91) become the quadratic equations
(7.93a)
whose roots are given by
(7.93b)
Thus, Eqs. (7.93b) establish how the eigenvalues l
dk
of the proportionally
damped system are related to the eigenvalues l
k
jv
k
of the undamped
system.
Equations (7.93a), which are associated with the free oscillation of the
kth mode of the proportionally damped system, has the same form of the char-
acteristic equation obtained for a single degree-of-freedom system; that is,
Eq. (4.49). Comparing these two equations, we introduce the modal damping
factor z
k
associated with the kth mode as
(7.94)
From Eq. (7.94), we see that if b 0, then z
k
a/v
k
and z
k
decreases as
v
k
increases. On the other hand, when a 0, z
k
bv
k
and z
k
increases as v
k
increases.
In terms of the modal damping factor, one can rewrite Eqs. (7.93a) as
(7.95)
Hence, if the damping factor z
k
of the kth mode is such that 0 z
k
1, then
one can define the corresponding damped natural frequency of the system as
(7.96)
The roots of Eqs. (7.93a), given by Eqs. (7.93b), are expressed in terms
of the damping factor z
k
, the natural frequency v
k
, and the damped natural fre-
quency v
dk
as
(7.97)l
dk
1,2
z
k
v
k
jv
dk
v
dk
v
k
21 z
2
k
l
2
dk
2z
k
v
k
l
dk
v
2
k
0
k 1, 2, . . ., N
z
k
1
2
a
a
v
k
bv
k
b
k 1, 2, . . ., N
l
dk
1,2
1
2
c1a bv
2
k
2 21a bv
2
k
2
2
4v
2
k
d
k 1, 2, . . ., N
l
2
dk
1a bv
2
k
2l
dk
v
2
k
0
k 1, 2, . . ., N
v
2
k
K
ˆ
kk
M
ˆ
kk
k 1, 2, . . ., N
11 bl
dk
2K
ˆ
kk
l
dk
1l
dk
a2M
ˆ
kk
0
k 1, 2, . . ., N
K
ˆ
kk
M
ˆ
kk
11 bl
dk
25X6
T
k
3K 45X6
k
l
dk
1l
dk
a25X6
T
k
3M 45X6
k
0
k 1, 2, . . ., N
5X6
T
k
311 bl
dk
23K 4 l
dk
1l
dk
a23M 445X6
k
5X6
T
k
506
k 1, 2, . . ., N
7.3 Free Response Characteristics 401
Examining Eqs. (7.97), it is clear that the real parts of the complex-conjugate
pair of eigenvalues associated with a particular mode contain information
about the associated damping factor and undamped natural frequency and that
the imaginary parts of these eigenvalues contain information about the asso-
ciated damped natural frequency.
From Eqs. (7.93), it is also clear that the characteristic polynomial asso-
ciated with the proportionally damped system is of the form
(7.98)
In other words, Eq. (7.98) is the result of expanding the determinant given in
Eq. (7.87) in terms of N quadratic polynomials, each being associated with an
equivalent single degree-of-freedom system in the considered mode of free
oscillation. The interpretation of the modal damping factors of the different
modes and the associated damped natural frequencies will be further clarified
in Section 8.2, when presenting the normal-mode approach.
In Section 7.3.2, we saw that the modal matrix , which consisted of
the N eigenvectors determined for the undamped system, is used to establish
the diagonal inertia matrix and the diagonal stiffness matrix by
making use of the orthogonality of the eigenvectors. Similarly, for a propor-
tionally damped system, the damping matrix given by Eq. (7.83) can be
transformed to a diagonal matrix . To examine this, let us start from
(7.99)
Then substituting from Eq. (7.83) into Eq. (7.99), we arrive at
(7.100)
where we have made use of Eqs. (7.68) and (7.69). On expanding the right-
hand side of Eq. (7.100), we have that
(7.101)
from which it is clear that we have a diagonal damping matrix [C
D
] for a pro-
portionally damped system. The matrix [C
D
] is rewritten in terms of the modal
damping factors given by Eqs. (7.94) as
(7.102)3C
D
4 D
2z
1
v
1
M
ˆ
11
0
p
0
02z
2
v
2
M
ˆ
22
p
0
oo∞o
00
p
2z
N
v
N
M
ˆ
NN
T
3C
D
4 ≥
1a bv
2
1
2M
ˆ
11
0
p
0
0 1a bv
2
2
2M
ˆ
22
p
0
oo∞o
00
p
1a bv
2
N
2M
ˆ
NN
¥
3a 3I 4 b 3v
2
D
443M
D
4
a3M
D
4 b3K
D
4 a3M
D
4 b3v
2
D
43M
D
4
3C
D
4 3£ 4
T
3a 3M 4 b3K443£ 4 a3£ 4
T
3M 43£ 4 b3£ 4
T
3K 43£ 4
3C
D
4 3£ 4
T
3C 43£ 4
3C
D
4
3C 4
3K
D
43M
D
4
3£ 4
. . . 1l
2
dN
1a bv
2
N
2l
dN
v
2
N
2 0
1l
2
d1
1a bv
2
1
2l
d1
v
2
1
21l
2
d2
1a bv
2
2
2l
d2
v
2
2
2
402 CHAPTER 7 Multiple Degree-of-Freedom Systems
On examining the form of Eq. (7.102), it is clear that each of the diagonal
terms is an equivalent damping coefficient associated with a certain damping
mode. The transformation given by Eq. (7.99) can also be used to determine
if the damping matrix for a system can be labeled as a proportional damping
matrix. In other words, if the resulting transformed damping matrix is a diag-
onal matrix, then the system is proportionally damped; in all other cases, the
transformed matrix is not a diagonal matrix.
Lightly Damped Systems and Other Cases
There are lightly damped systems (0 z 0.1) in which does
not result in a diagonal matrix.
30
In this case, the off-diagonal terms are neg-
lected, and only the diagonal terms
kk
are retained. In this case,
the damping factor z
k
takes the form
(7.103)
Another case of interest is one where the damping factor is constant and
equal for each mode. In this case, the modal damping factor is assumed to be
(7.104)
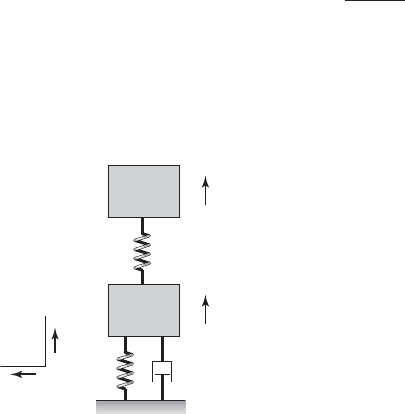
The last case that we shall consider corresponds to the physical system
shown in Figure 7.21, which is used as a vibratory model of such diverse
systems as an animal paw
31
or a system with a vibration absorber, which is
discussed in Section 8.6. For this two degree-of-freedom system, the damp-
ing matrix and the modal damping are given by, respectively,
(7.105)
Making use of Eqs. (7.105), the matrix is determined as
(7.106)
Thus, we see that for a two degree-of-freedom system where one damper is
connected to only one inertial element, the resulting transformed matrix is a
c
c
1
X
2
11
c
1
X
12
X
21
c
1
X
11
X
12
c
1
X
2
12
d
c
X
11
X
21
X
12
X
22
dc
c
1
X
11
c
1
X
12
00
d
3£ 4
T
3C 43£ 4 c
X
11
X
21
X
12
X
22
dc
c
1
0
00
dc
X
11
X
12
X
21
X
22
d
3£ 4
T
3C 43£ 4
3£ 4 c
X
11
X
12
X
21
X
22
d
3C 4 c
c
1
0
00
d
3£ 43C 4
z
k
z
k 1, 2, . . ., N
z
k
1
2v
k
M
ˆ
kk
13£ 2
T
3C 43£ 42
kk
13£ 4
T
3C 43£ 42
3£ 4
T
3C 43£ 4
7.3 Free Response Characteristics 403
30
J. H. Ginsberg, Mechanical and Structural Vibrations, John Wiley & Sons, NY, Chapter 4
(2001).
31
R. M. Alexander, Elastic Mechanisms in Animal Movement, Cambridge University Press, Cam-
bridge, Great Britain, Chapter 7 (1988).
FIGURE 7.21
Vibratory model of a two
degree-of-freedom system with
one damper.
k
1
k
2
x
1
x
2
c
1
i
j
m
2
m
1
nondiagonal matrix. This information is useful for deciding which approach
to use in determining a solution for the response of a multiple degree-of-
freedom system, as discussed in Chapter 8.
EXAMPLE 7.21
Nature of the damping matrix
For the following mass, stiffness, and damping matrices, we shall determine
whether the system has proportional damping.
(a)
To determine whether the damping matrix is proportional, we consider
Eq. (7.83) and determine if there are constants a and b for which the damp-
ing matrix in Eq. (a) is written as
(b)
Comparing the elements of matrix from the third equation of Eqs. (a) with
those of Eq (b), we obtain
(c)
from which we find that a 0.2 and b 0.2. Therefore, it is possible to ex-
press the damping matrix in the form of Eq. (7.83), and hence, the given
damping matrix represents proportional damping.
EXAMPLE 7.22
Free oscillation characteristics of a proportionally damped system
We revisit Example 7.21 to determine the characteristic equation associated
with this system, and from this equation, we solve for the eigenvalues associ-
ated with the damped system. We shall illustrate how the modal damping
factors are calculated and the associated damped natural frequencies are
determined.
Undamped System
To determine the natural frequencies of the undamped system, we make use
of the stiffness and inertia matrices from Eqs. (a) of Example 7.21 and
Eq. (7.26) and obtain the following characteristic equation:
a b 0.4
b 0.2
2 a 2b 0.8
3C 4
c
2a 2b b
ba b
d
a c
20
01
d b c
2 1
11
d
3C 4 a3M4 b3K4
3C 4
3M 4 c
20
01
d
3K 4 c
2 1
11
d,
3C 4 c
0.8 0.2
0.2 0.4
d
404 CHAPTER 7 Multiple Degree-of-Freedom Systems
or
(a)
Equation (a) leads to the quartic equation
(b)
whose roots are
(c)
Since and are real symmetric matrices, the eigenvalues are real. To
determine the associated natural frequencies, one can use Eq. (7.35)—that is,
l
2
v
2
—and obtain
rads/s
rads/s (d)
Damped System
From Eq. (7.81) and Eqs. (a) of Example 7.21, we find that the characteristic
equation in the proportionally damped case is given by
which is rewritten as
(e)
Expanding the determinant in Eq. (e), we arrive at the quartic polynomial
(f)
Solving
32
Eq. (f), we find that the eigenvalues in the proportionally damped
case are given by
(g)l
d2
1,2
l
3,4
0.271 j1.278
l
d1
1,2
l
1,2
0.129 j0.526
2l
4
1.6l
3
4.28l
2
1.2l 1 0
det c
2l
2
0.8l 2 0.2l 1
0.2l 1 l
2
0.4l 1
d 0
det cl
2
c
20
01
d l c
0.8 0.2
0.2 0.4
d c
2 1
11
dd 0
v
1
B
1
1
22
1.307
v
1
B
1
1
22
0.541
3K 43M4
l
2
a1
1
22
b
2l
4
4l
2
1 0
det c
21l
2
12 1
1 1l
2
12
d 0
det cl
2
c
20
01
d c
2 1
11
dd 0
7.3 Free Response Characteristics 405
32
The MATLAB function roots was used.
Equations (g) could have been obtained directly from Eqs. (7.93b) after
making use of the undamped natural frequencies given in Eqs. (d) and the val-
ues of a and b determined in Example 7.21; that is,
(h)
and
(i)
From Eq. (d), we have that v
1
0.541 rad/s and v
2
1.307 rad/s. Mak-
ing use of Eq. (7.97), we obtain the damping factors as z
1
0.129/0.541
0.238 and z
2
0.271/1.307 0.207. The modal damping factors can also be
found from Eqs. (7.94) as
(j)
which agree with the previously determined values. Since both damping fac-
tors are less than 1, the corresponding damped natural frequencies are deter-
mined by making use of Eqs. (7.96), (d), and ( j). The calculations lead to
rad/s
rad/s (k)
EXAMPLE 7.23
Free oscillation characteristics of a system with gyroscopic forces
We revisit Example 7.4, where we discussed a gyro-sensor, and illustrate the
effects that gyroscopic forces have on the eigenvalues. The characteristic
polynomial is determined for the damped case and the eigenvalues are ex-
plicitly determined only for the undamped case.
Setting the external force f
x
to zero in Eq. (d) of Example 7.4, we obtain
the following system of equations:
(a)
Considering a special case where c
x
c
y
c and k
x
k
y
k in Figure 7.6;
that is, the stiffness-damper combinations are identical in both directions,
3M 4e
x
$
y
$
f 3C 4e
x
#
y
#
f 3G 4e
x
#
y
#
f 3K 4e
x
y
f e
0
0
f
v
d2
1.307 21 0.207
2
1.279
v
d1
0.541 21 0.239
2
0.525
z
2
1
2
a
0.2
1.307
0.2 1.307 b 0.207
z
1
1
2
a
0.2
0.541
0.2 0.541 b 0.239
0.271 j1.278
l
d2
1,2
1
2
310.2 0.2 0.1.307
2
2 210.2 0.2 1.307
2
2
2
4 1.307
2
4
0.129 j0.526
l
d1
1,2
1
2
310.2 0.2 0.541
2
2 210.2 0.2 0.541
2
2
2
4 0.541
2
4
406 CHAPTER 7 Multiple Degree-of-Freedom Systems
we find that the different matrices in Eqs. (a) are determined from Eqs. (e)
of Example 7.4 as
(b)
To determine the eigenvalues associated with this system, we set the cir-
culatory terms and substitute Eqs. (b) into Eq. (7.77) to obtain the
characteristic equation
(c)
Equation (c) is rearranged to give
(d)
On expanding this determinant, the result is the quartic polynomial
(e)
Equation (e) is the characteristic equation for the damped system, whose four
roots are determined numerically for given values of k, c, m, and v
z
.
In order to determine the eigenvalues of the undamped system explicitly,
we set c 0 in Eq. (e) and obtain
(f)
The roots of this quadratic polynomial in l
2
are given by
(g)
When the gyroscopic force is zero—that is, v
z
0—these results reduce to
the natural frequencies of two uncoupled single degree-of-freedom systems,
each of which has the same mass and the same stiffness. Since
then all of the eigenvalues are imaginary, as in the case of an undamped sys-
tem free of gyroscopic forces; that is, when v
z
0.
2v
z
B
k
m
a
k
m
v
2
z
b
l
2
1,2
a
k
m
v
2
z
b 2v
z
B
k
m
l
4
2 a
k
m
v
2
z
bl
2
a
k
m
v
2
z
b
2
0
2 a
k
m
v
2
z
b
c
m
l a
k
m
v
2
z
b
2
0
l
4
2
c
m
l
3
ca
c
m
b
2
2
k
m
2v
2
z
dl
2
det c
ml
2
cl k mv
2
z
2mv
z
l
2mv
z
l ml
2
cl k mv
2
z
d 0
c
k mv
2
z
0
0 k mv
2
z
dd 0
det cl
2
c
m 0
0 m
d l ac
c 0
0 c
d c
0 2mv
z
2mv
z
0
db
3H 4 304
3C 4 c
c 0
0 c
d,
3G 4 c
0 2mv
z
2mv
z
0
d
3M 4 c
m 0
0 m
d,
3K 4 c
k mv
2
z
0
0 k mv
2
z
d
7.3 Free Response Characteristics 407
7.3.4 Conservation of Energy
In Section 7.2.1, we discussed how the linear momentum and the angular mo-
mentum of a multiple degree-of-freedom system is conserved when the ex-
ternal forces and external moments are absent. Here, we examine when the
energy of a multiple degree-of-freedom system is conserved during free os-
cillations. To this end, we start from Eq. (7.73), which are the equations for a
damped system with gyroscopic and circulatory terms; that is
Pre-multiplying this equation by , we arrive at
(7.107)
Noting that { } 0 because the gyroscopic matrix is a skew sym-
metric matrix, and expanding and rearranging Eq. (7.107) leads to
(7.108)
Since and are symmetric matrices, the left-hand side of Eq. (7.108)
is expressed in terms of a time derivative as
(7.109)
Examining Eq. (7.109), we find that if the system is undamped and free of cir-
culatory forces, the right-hand side is zero and Eq. (7.109) becomes
(7.110)
which means that
(7.111)
Making use of Eqs. (7.8) for a natural system, we recognize that the left-hand
side of Eq. (7.111) is the sum of the system kinetic energy and the system po-
tential energy. In other words, Eq. (7.111) means that
(7.112)
where E is the total energy of the natural system. Thus, the energy of a mul-
tiple degree-of-freedom system is only conserved in the absence of damping
and circulatory forces. For nonnatural systems, the left-hand side of Eq.
(7.111) is referred to as the Hamiltonian of the system.
33
E T V constant
1
2
5x
#
6
T
3M 45x
#
6
1
2
5x6
T
3K 45x6 constant
d
dt
a
1
2
5x
#
6
T
3M 45x
#
6
1
2
5x6
T
3K 45x6b 0
d
dt
a
1
2
5x
#
6
T
3M 45x
#
6
1
2
5x6
T
3K 45x6b5x
#
6
T
3C 45x
#
6 5x
#
6
T
3H 45x6
3K 43M 4
5x
#
6
T
3M 45x
$
6 5x
#
6
T
3K 45x65x
#
6
T
3C 45x
#
6 5x
#
6
T
3H 45x6
x
#
3G 45x
#
6
T
5x
#
6
T
3M 45x
$
6 5x
#
6
T
33C 4 3G445x
#
6 5x
#
6
T
33K 4 3H445x6 506
5x
#
6
T
3M 45x
$
6 33C4 3G 445x
#
6 33K4 3H 445x6 506
408 CHAPTER 7 Multiple Degree-of-Freedom Systems
33
L. Meirovitch, ibid.
EXAMPLE 7.24 Conservation of energy in a three degree-of-freedom system
Consider the three degree-of-freedom system used to model the milling ma-
chine shown in Figure 7.4. We set f
1
(t) to zero so that we can examine free os-
cillations of this system. Then, Eqs. (b) of Example 7.1 become
(a)
From the form of Eqs. (a), it is clear that the system is free of gyroscopic
and circulatory forces. However, due to the presence of damping, we see from
Eq. (7.109) that the sum of the kinetic energy of the system and the potential
energy of the system is not conserved; in other words,
constant (b)
Making use of E T V to represent the total energy of the system and us-
ing Eq. (7.109), we see that
(c)
Since the value of the right-hand side of Eq. (c) is always negative, except
when (i.e., at the system’s equilibrium position), the total
energy of the system continues to decrease and eventually comes to zero at the
system’s equilibrium position. In the absence of damping, Eq. (c) becomes
(d)
and hence, energy is conserved.
7.4 ROTATING SHAFTS ON FLEXIBLE SUPPORTS
Many types of rotating machinery are mounted on a shaft, which in turn is
mounted to a supporting structure with flexibility. This flexibility is modeled
as springs. The masses mounted to the shaft can have slight imbalances,
dE
dt
0
x
#
1
x
#
2
x
#
3
0
dE
dt
5x
#
6
T
3C 45x
#
6Bc
1
1x
#
1
x
#
2
2
2
c
2
1x
#
2
x
#
3
2
2
c
3
x
#
2
3
R
System potential energy
System kinetic energy
1
2
m
1
x
#
1
2
1
2
m
2
x
#
2
2
1
2
m
3
x
#
2
3
1
2
k
1
1x
1
x
2
2
2
1
2
k
2
1x
2
x
3
2
2
1
2
k
3
x
2
3
C
k
1
k
1
0
k
1
k
1
k
2
k
2
0 k
2
k
2
k
3
Sc
x
1
x
2
x
3
s c
0
0
0
s
C
m
1
00
0 m
2
0
00m
3
Sc
x
$
1
x
$
2
x
$
3
s C
c
1
c
1
0
c
1
c
1
c
2
c
2
0 c
2
c
2
c
3
Sc
x
#
1
x
#
2
x
#
3
s
7.4 Rotating Shafts on Flexible Supports 409
⎫
⎪
⎪
⎪
⎬
⎪
⎪
⎪
⎭
⎫
⎪
⎪
⎪
⎪
⎪
⎬
⎪
⎪
⎪
⎪
⎪
⎭