Canete J.F. System Engineering and Automation: An Interactive Educational Approach
Подождите немного. Документ загружается.

88 4 System Response Analysis
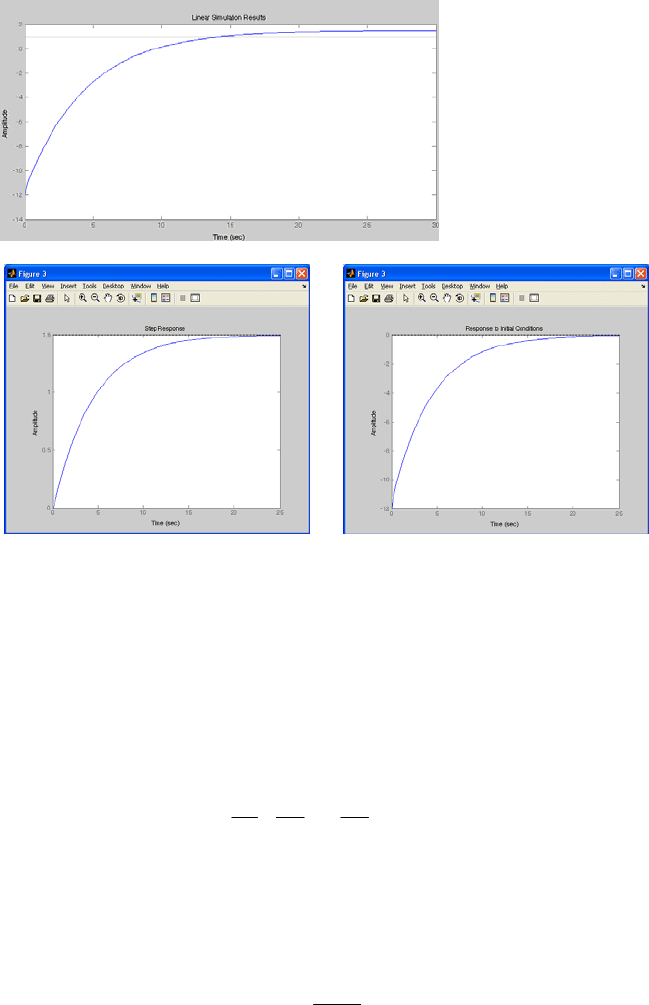
>> A = [-9 -2;1 0];
>> B = [1;0];
>> C = [0 3];
>> D = [0]
>> sys=ss(A,B,C,D);
>> t=0:0.1:30;
>> u=ones(301,1)';
>> lsim(sys,u,t,[2;-4]);
>> step(G)
>> initial (sys,[2;-4])
Fig. 4.2 System response against step input. Up) Response considering initial conditions.
Down left) response without considering initial conditions (force response). Down right)
Contribution of the initial conditions to the final response (natural response).
where
C is the thermal capacitance of the thermometer, R the thermal resistance, t
the measured temperature and
t
r
is the reference temperature. Thus, this equation
can be rewritten to meet the expression (4.4) as:
(4.6)
with
T, the system output and T
r
the reference input.
In general, the transfer function of a first-order system obtained by means of
the Laplace transformation of the equation (4.4) is:
(4.7)
11
r
dT
TT
dt CR CR
+=
0
0
()
b
Gs
sa
=
+

4.2 System Transient Response 89
The response of the system,
Y(s), against step input with amplitude A, considering
initial conditions as null, can be derived as follows:
(4.8)
remembering that:
(4.9)
Applying residues we can separate this expression as:
(4.10)
with
(4.11)
Yielding that
(4.12)
That is, the response of a first-order system against an abrupt change in the input
(a step input) exhibits a negative exponential behavior as shown in fig.
4.1.
Notice that, assuming , , and thus, .
That is, the steady-state, i.e. the final value of a first-order response is
and
the term works as a factor that multiplies the amplitude of the input, so it is
normally called
gain and represented with K. Rewriting the system output using
K, the expression for y(t) remains:
00
00
() ()
bb
A
Ys Us
sa sas
==
++
{}
1
()
e
A
Au t
s
−
=l
12
0
()
KK
Ys
ssa
=+
+
00
12
00
;
bA bA
KK
aa
==−
()
1
0
00
00 0
11
() () 1 ()
at
e
bA bA
Ys yt e u t
assa a
−
−
⎛⎞
=−⎯⎯→=−
⎜⎟
+
⎝⎠
l
0
0a >
0
lim 0
at
t
e
−
→∞
=
0
0
lim ( )
t
bA
yt
a
→∞
=
0
0
bA
a
0
0
b
a
90 4 System Response Analysis
(4.13)
Also note that the higher the magnitude of , the faster the system response
achieves the steady-state. We can define the
time constant for first-order systems
as which determines the moment in which the response is 63.21% of the
final value. That is when t=τ,
(4.14)
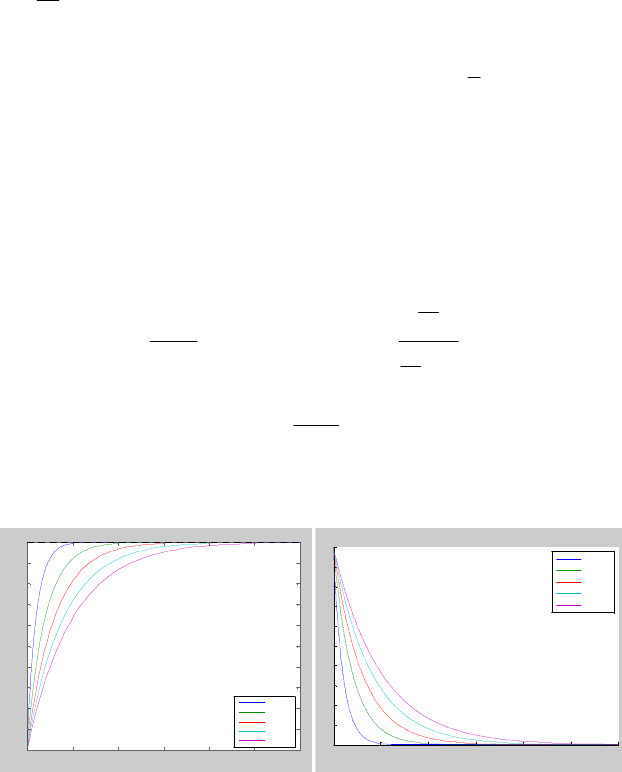
The effect of the time constant τ on a first-order system can be observed in
fig. 4.3. Now, in term of the parameters, K, and τ, the transfer function of a
first-order system can be rewritten as:
(4.15)
that quickly identifies the system gain and the time constant.
Fig. 4.3 System response for first-order systems. Left, step response varying the time
constant. Lower values produce quicker responses. This is because the negative exponential
term tends more quickly to zero (right).
()
0
() 1 ()
at
e
yt KA e u t
−
=−
0
a
0
1
a
τ
=
()
{}
()
0
0 0
1
1
() 1 ( ) 1
( ) 1 0.6321
a
aa
yt KA e t y KA e
yKAe KA
τ
ττ
τ
−
−
−
⎛⎞
=−⇒ = ⇒ =− ⇒
⎜⎟
⎜⎟
⎝⎠
=−= ⋅
{}
0
00
0
0
0
( ) dividing by , ( )
1
1
()
1
b
ba
Gs a Gs
sa
s
a
K
Gs
s
τ
==⇒
+
+
=
+
0 5 10 15 20 25 30
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Step Response
Time
(
sec
)
Amplitude
tau=1.0
tau=2.0
tau=3.0
tau=4.0
tau=5.0
0 5 10 15 20 25 3
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t
exp(-t./tau)
tau=1.0
tau=2.0
tau=3.0
tau=4.0
tau=5.0
4.2 System Transient Response 91
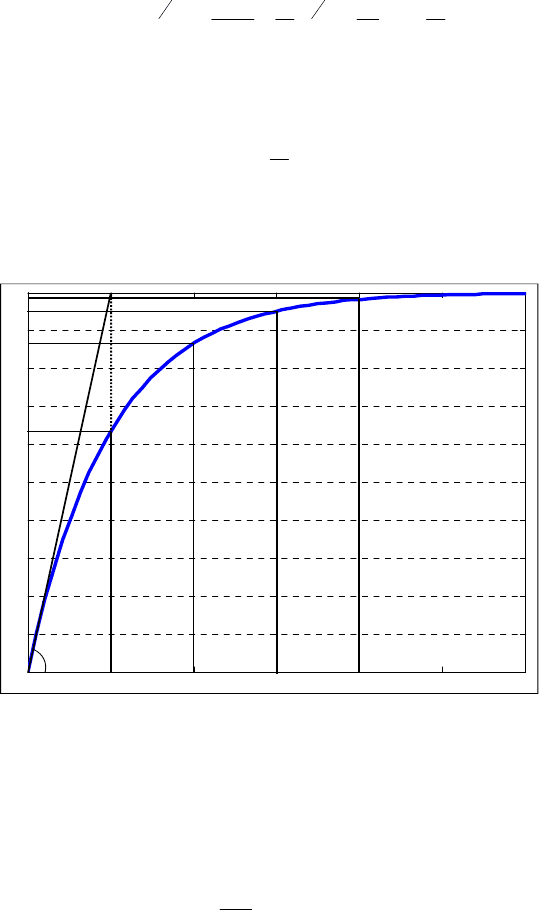
Geometrically, the system gain and time constant are related to the tangent of
the response at t=0. Deriving the time response (assuming a unitary step):
(4.16)
That is, we obtain that the derivate of the response at t=0 corresponds to, K/
τ
,
which is the same
(4.17)
Fig. 4.4 illustrates this relation.
Fig. 4.4 System response for a first-order system with K=τ=1.
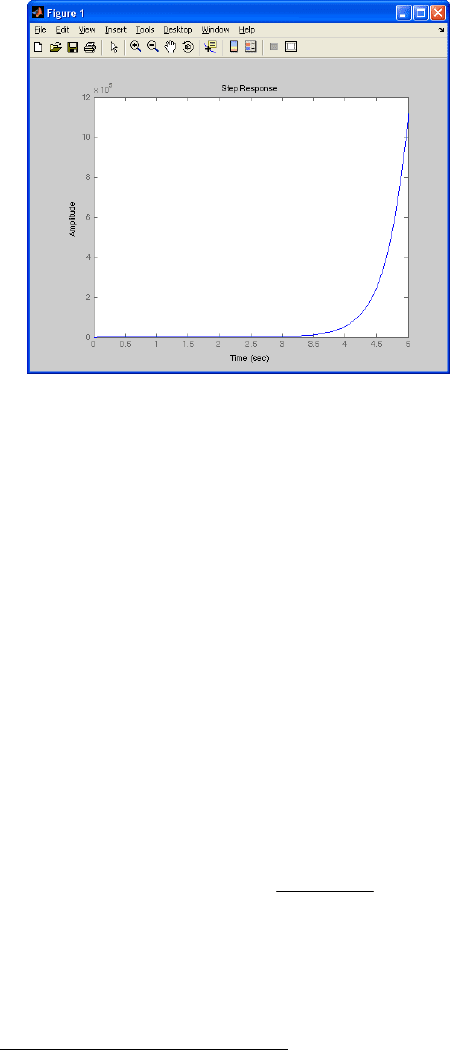
The reader may have noted that the coefficient a
0
has been considered as
positive up to now. Having a negative value for this coefficient would make the
system unstable since the exponential term of the response would grow
indefinitely. That is, for a
0
<0,
(4.18)
And the step output will be:
(
)
()
() 1 (0)
tt
dy t K dy K
yt K e e
dt dt
ττ
ττ
−−
=− ⇒ = ⇒ =
tan( )
K
α
τ
=
0 1 2 3 4 5 6
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
α
τ
K
()
0
0
0
lim ( ) lim 1
at
tt
bA
yt e
a
→∞ →∞
=−=∞
−
92 4 System Response Analysis
>>s=tf(‘s’);
>>G=1/(s-3);
>>step(G);
Fig. 4.5 System response for an unstable first-order system.
Second-Order System Response
In general, second-order systems can be represented as differential equations in
the form:
(4.19)
That is, it relates the input (u(t)) and the output (y(t)) of the system involving, as
maximum, the second derivation order of the latter. An example of a second-order
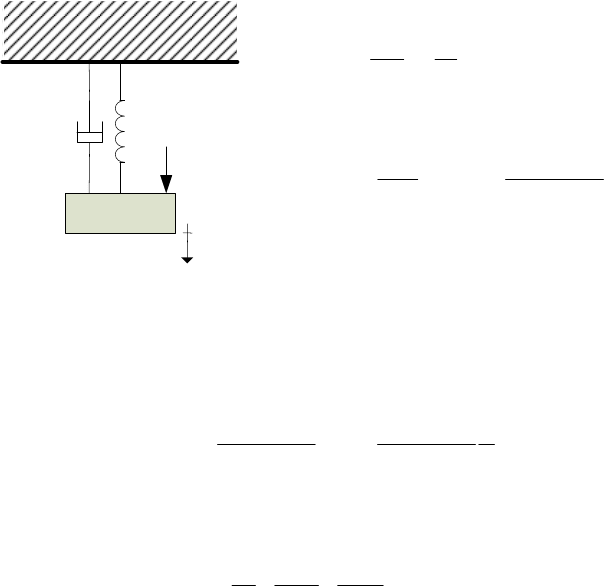
system can be shown in fig. 4.6. This example is a simple representation of the
shock-absorbing system of a vehicle made of a spring (with a force constant, k), a
dashpot (with a damping constant, b), and the mass of the vehicle, m. Considering a
rest setup at rest, (initial conditions considered as null) we are interested on studying
the pose of the mass (y(t)) when a given input force (u(t)) is applied.
Recalling Chapter 2, and applying the force conservation principle, we can
derive the differential equation shown in fig. 4.6, obtaining thus the transfer
function for this system.
In general, the transfer function for a second-order system is
1
(4.20)
where the characteristic equation (the denominator of the function) is of second
order.
1
Without generality loss, we assume there are no derivates for the input.
1010
'' ' 'yy uuaaybb+++=
0
2
10
()
b
Gs
sasa
=
++
4.2 System Transient Response 93
Fig. 4.6 A mechanical system and the derivation of its transfer function.
The response of a prototypal second-order system against a step input of
amplitude A is
(4.21)
Applying residues we can separate this expression as:
(4.22)
And according to the nature of the three roots of the characteristic equation (also
known as poles) we can distinguish three cases:
•
s
1
and s
2
are both real and s
1
≠ s
2
.
•
s
1
and s
2
are real and s
1
= s
2
.
•
s
1
and s
2
are complex conjugates.
In the following we can discuss the particular responses for each case.
Second-Order System with Two Real, Different Poles
In this case, applying the inverse transformation of Laplace to equation (4.22) we
obtain the general response expression for second-order systems when their poles
are different and real.
(4.23)
m
k
b
y(t)
u(t)
2
2
2
2
()
() () () ()
()( ) ()
() 1
() ()
()
dy dy
mbkyft
dt dt
ms Y s bsY s kY s U s
Ys ms bs k Us
Ys
Gs Gs
Us ms bs k
++=⇒
++=
++=
= ⇒ =
++
l
00
22
10 10
() () () ()
bb
A
Ys GsUs Us
ssasa sasa
== =
++ ++
312
12
()
KKK
Ys
sssss
=+ +
++
12
12 3
() ( ) ()
st st
e
yt K Ke Ke u t
−−
=+ +
94 4 System Response Analysis
Notice that this expression is similar to the response of first-order system but
adding a new exponential term. The steady-state value for the response will be K
1
since the two exponential terms will tend to zero as long as the time tends to
infinite as presented in the previous section.
Example 4.2
Consider the second order system:
Calculate the time response function when a unitary step is applied.
Solution
Given the transfer function, G(s), and the input U(s), the time response is
calculated as:
When the input is a unitary step, one can derive the values for the residues K
1
, K
2
and K
3
by using the Matlab command residue. Given the numerator and
denominator of an expression, this command returns the ordered list of poles and
their residues:
>> [r,p]=residue(2.5,conv([1 0],(conv([1 1],[1 2]))))
r =
1.2500
-2.5000
1.2500
p =
-2
-1
0
That is, in this case K
1
=1.25, K
2
=-2.5 and K
3
=1.25, and therefore the output for
this system is:
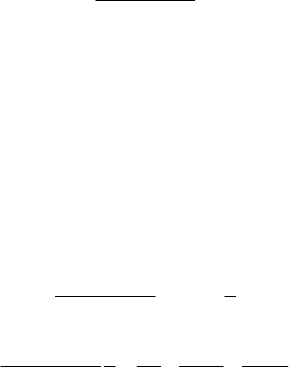
Graphically the response for this system is shown in fig. 4.7. Note that it is similar to
the response of first-order systems, but a little bit slower at the beginning, appearing
2.5
()
(1)(2)
Gs
ss
=
++
3
12
12
() () ()
2.5 1
() , ()
(1)(2)
2.5 1
()
(1)(2)
Ys GsUs
Gs Us
ss s
K
KK
Ys
s s s s ss ss
=
==
++
==++
++ + +
2
( ) (1.25 2.5 1.25 ) ( )
tt
e
yt e e u t
−−
=− +
4.2 System Transient Response 95
as a characteristic S-shape, which is normal due to the addition of an extra
exponential term. Also, the magnitude of the poles is responsible for the time needed
to achieve the steady-state: the smaller they are, the quicker the output reaches the
final value. There is no need to say that s
1
and s
2
must be both positive to make the
exponential terms to tend to zero. Otherwise the system will be unstable.
>> s=tf('s');
>> G=2.5/( (s+1)*(s+2))
Transfer function:
2.5
-------------
s^2 + 3 s + 2
>> step(G)
Fig. 4.7 Second-order system response. The presence of two real (different) poles produces
a smooth output. Recalling the final value theorem, it is easy to calculate the final value as
2.5/2=1.25.
Second-Order System with Two Real and Equal Poles
This case is very similar to the previous one with a response represented by
(assuming unitary step input):
(4.24)
The expression changes the exponential term by an exponential term multiplied
by t, which will also tend to zero as long as time tends to infinite (assuming
s
1
positive).
Example 4.3
Considering a modification of the previous example:
Calculate the time response function when a unitary step is applied.
11
3
12
12 3
2
11
() () ( ) ()
()
st st
e
K
KK
Ys yt K Ke Kte u t
sss
ss
−−
=+ + ⇒ =+ +
+
+
2.5
()
(1)(1)
Gs
ss
=
++
96 4 System Response Analysis
Solution
Similarly to the Example 4.2
With K
2
=K
3
=-2.5 and K
1
=2.5 given by:
>> [r,p]=residue(2.5,conv([1 0],(conv([1 1],[1 1]))))
r =
-2.5000
-2.5000
2.5000
p =
-1
-1
0
yields
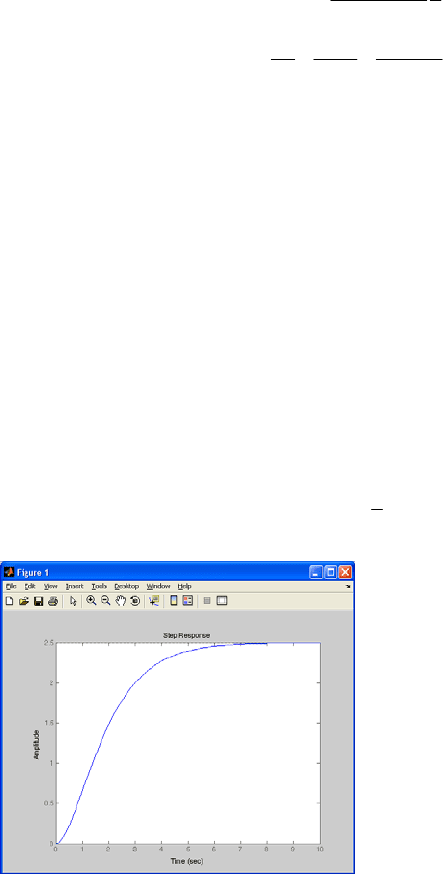
Regarding the response shape, it again exhibits similarities with respect to the case
of two different poles, i.e. a S-shape at the beginning (see fig.
4.8). In this
example, the final value is 2.5, i.e. the gain of the system is 2.5, as the reader can
check by applying the final value theorem to
>> G=2.5/( (s+1)*(s+1))
Transfer function:
2.5
-------------
s^2 + 2 s + 1
>> step(G)
Fig. 4.8 Second-order system response with two real and equal poles.
3
12
2
11
() () ()
2.5 1
() ()
(1)(1)
()
()
Ys GsUs
Ys Gs
sss
K
KK
Ys
sss ss
=
==
++
=+ +
++
( ) (2.5 2.5 2.5 ) ( )
tt
e
yt e te u t
−−
=− −
1
() ()Ys Gs
s
=
4.2 System Transient Response 97
Second-Order System with Complex Conjugates
Up to now, the presence of real poles (different or equals) added an exponential
term to the temporal response of the system. This notably changes when complex
conjugate poles come into scene. The decomposition of the response of a second-
order system with poles against step input yields:
(4.25)
which cannot be directly transformed to a temporal expression through the
Laplace Transformation table. By means of a simple algebraic manipulation we
can sum up the terms that involve the complex conjugates poles:
(4.26)
And then, going back by separating the sum as:
(4.27)
In this manner we obtain an equivalent expression in which each term can be
directly transformed into:
(4.28)
Analyzing this expression we note the presence of oscillations in the response due to
the sen and cos terms. Also note that such oscillations will disappear as long as the
time tends to be infinite, given that they are multipled by negative exponential terms.
As well as in previous cases the final value will be K
1
and in this case the effect
of the oscillations will depend on the magnitude of the real part of the poles (σ)
and their angular speed will be caused by the conjugate part (
ω).
Example 4.4
Given the transfer function
Obtain the residues and the time response function.
1,2
sj
σω
=±
312
()
KKK
Ys
ss j s j
σω σω
=+ +
+− ++
()
**
231
2
2
**
223 3
()
()
2Re( ), 2Im( )
Ks K
K
Ys
s
s
KKK K
σω
σω
++
=+
++
==−
() ()
**
3
12
22
22
()
()
K
KKs
Ys
s
ss
ω
σ
σω σω
+
=+ +
++ ++
**
12 3
() ( cos ) ()
tt
e
yt K K e t K e sen tu t
σσ
ωω
−−
=+ +
2
5
()
413
Gs
ss
=
++