Canete J.F. System Engineering and Automation: An Interactive Educational Approach
Подождите немного. Документ загружается.

68 3 System Description
system behavior for
. These variables are usually well-known and
measurable quantities.
The set of state variables constitutes a vector, so that the system behavior can
be described in a state space with n axis corresponding to each state vector’s
component
. Assuming that the actual system state at any time t in the state
space is represented by a point, we can define a state trajectory as the path over
time of these points as the system evolves for
.
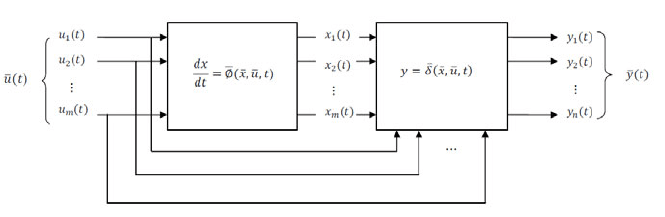
The state space representation (internal description) is useful for analyzing
multi-input multi-output systems, and is given in general by the state transition
and the state output equations. In general, considering a continuous system with r
inputs and s outputs (fig. 3.19) the state transition equations can be described by a
set of n independent differential equations in the following form
,
,…,
,
,
,…,
,
,
,…,
,
,
,…,
,
,
,…,
,
,
,…,
,
(3.34)
with
,1,…., non-linear in general. The parameter n is denoted as the
system order, and plays a fundamental role for the system behavior.
Fig. 3.19 State space representation for a continuous system
In the same way, the state output equations can be described by a set of s
independent differential equations in the following form
,
,…,
,
,
,…,
,
,
,…,
,
,
,…,
,
,
,…,
,
,
,…,
,
(3.35)
also with
,1,…., non-linear in general.
Let us particularize the analysis for a dynamical system with
,1,…, and
,1,…, both described by a linear combination of state and input signals,

3.6 The State Space Approach 69
assuming also the system is stationary with no explicit direct dependence with t. In
this case, the state transition equations take the form
(3.36)
while the state output equations are represented by
(3.37)
The state equations (3.36) and (3.37) can be rewritten by using the vector-matrix
representation, hence
(3.38)
where A is a matrix, B is a matrix, C is a matrix and D is a
matrix, constituting ,,,, the state space representation of a linear
and invariant dynamic system. This state space representation is not unique, since
each one depends on the state variable selection procedure. In general, the set of
state variable selected includes one or more variables and its successive
derivatives.
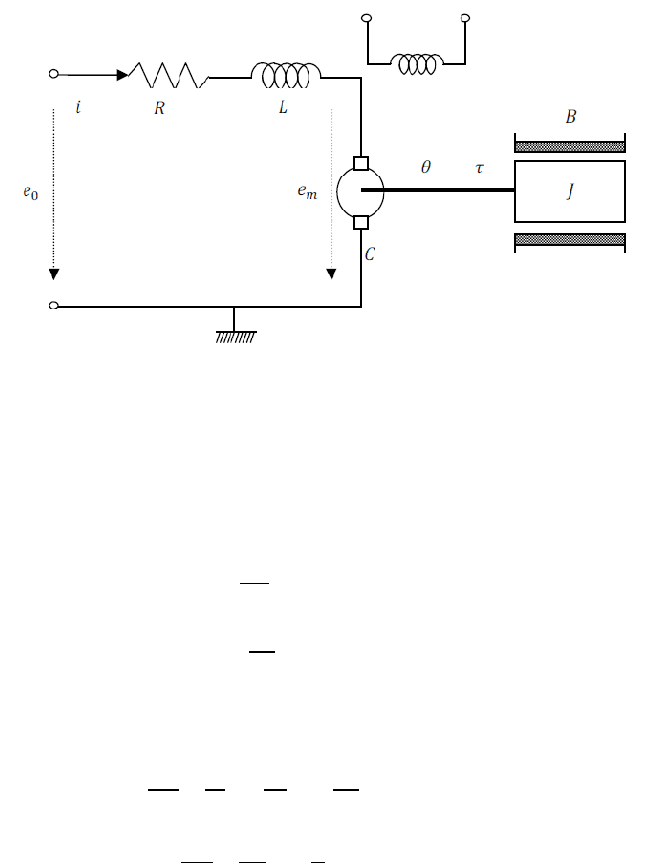
Example 3.7
Derive the state equations for the electromechanical system shown in fig. 3.20
starting from the dynamic equations written as
by using a state vector
,
,
, where
and
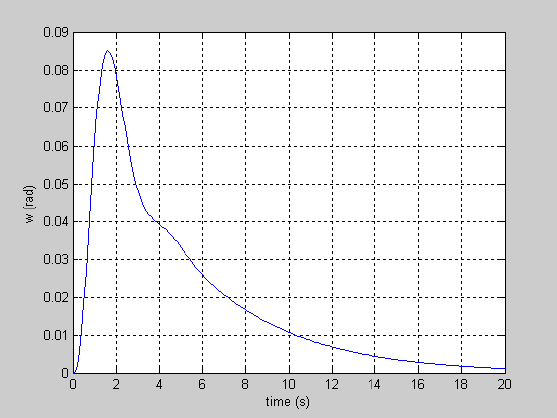
. Represent this system by using MATLAB and obtain the
response for an input signal
2, for the parameter values
of
1,
5,
0.8, 1.5 and 0.2.
70 3 System Description
Fig. 3.20. Diagram of a DC motor
Solution
In order to derive the state transition equations we solve for the derivatives of
,. Therefore, we substitute
and
into the other
equations, so we have
In this way, solving for the derivatives of
and using the corresponding
assignment we get
1
,
,
,
,
Since the system output has been already assigned as
, the state
output equation becomes
,
,
3.6 The State Space Approach 71
Rewriting in vector-matrix form yields
0
01
Encoding the system dynamics into MATLAB we get
>> La=1;Ra=5;Km=0.8;J=1.5;B=0.2;
>> A_m=[-Ra/La -Km/La;Km/J -B/J]
A_m =
-5.0000 -0.8000
0.5333 -0.1333
>> B_m=[B;0]
B_m =
0.2000
0
>> C_m=[0 1]
C_m =
0 1
>>D_m=[0]
>> SYS=ss(A_m,B_m,C_m,D_m)
a =
x1 x2
x1 -5 -0.8
x2 0.5333 -0.1333
b =
u1
x1 0.2
x2 0
c =
x1 x2
y1 0 1
d =
u1
y1 0
Continuous-time model.
>> t=0:0.1:20;u=10*exp(-t).*sin(2*t)
>> y=lsim(SYS,u,t);plot(t,y)
>> grid
In fig. 3.21 the response of the DC-motor running under MATLAB is shown.
72 3 System Description
Fig. 3.21 Response of the DC motor to input signal
3.6.1 Relation between Transfer Function and State Space
Approaches
Both the transfer function approach and the state equation formulation represent
the dynamics of the same continuous linear and invariant system. Therefore, it is
obvious to expect that there is a interrelation between both kind of representation.
In effect, we are going to consider a simple case of single-input single-output
linear and invariant system similar to the one described in (3.3) defined by
(3.39)
with
1 (otherwise we divide both members of (3.39) by
) and
,
0,… (in general
0 for 1,… if .
We are going to define the set of state variables as
(3.40)
where the parameters
,0,…1 are given by

3.6 The State Space Approach 73
(3.41)
Then, according to (3.40) definition, the state transition equation becomes
(3.42)
Rewriting (3.42) in vector-matrix form we have
01
…0
00
…0
(3.43)
Recalling that the output is defined by (3.40) we get
(3.44)
and rewriting (3.44) in vector-matrix form we have
10
…0
(3.45)
Therefore, it is possible to transform the transfer function representation into the
state space one, simply by identifying the corresponding parameters
,0,…
and
,0,… of the transfer function corresponding to (3.39), to obtain after
the state space matrices ,.,}.
Conversely, the transfer function can be easily determined from the state space
representation ,.,} by simply applying the Laplace transform to the
definition equations as described in (3.38) (assuming null initial conditions). Then,
we have
(3.46)

74 3 System Description
Rearranging the
term we find that
(3.47)
(3.48)
and substituting, we obtain
(3.49)
which defines the transfer matrix function (in general) of the given system
(3.50)
The results obtained here can be easily extended to multiple-input multiple-output
systems increasing the size of the matrices B, C, and D according to the dimension
of the input and output signals and .
Example 3.8
Derive the state space equations corresponding to the hydraulic system of
Example 3.6 with transfer function defined by
1
61
and realize the transfer function to state space conversion by using adequate
MATLAB commands and plot also the step response.
Solution
Starting from the transfer function we identify by inspection the coefficients
,0,… and
,0,… with 2, so we have
1,
6,
1
while
1,
0,
0. Therefore we get
0
0
1
3.6 The State Space Approach 75
By substituting in (3.43) we have the state equations
01
1 6
0
1
10
0
Encoding the system transfer function into MATLAB and converting it into its
state space form we have
>> s=tf('s');
>> G=1/(s^2+6*s+1)
Transfer function:
1
-------------
s^2 + 6 s + 1
>> [A,B,C,D]=ssdata(G)
A =
-6 -1
1 0
B =
1
0
C =
0 1
D =
0
>> ssG=ss(A,B,C,D)
a =
x1 x2
x1 -6 -1
x2 1 0
b =
u1
x1 1
x2 0
c =
x1 x2
y1 0 1
d =
u1
y1 0
Continuous-time model.
>> step(ssG,50)
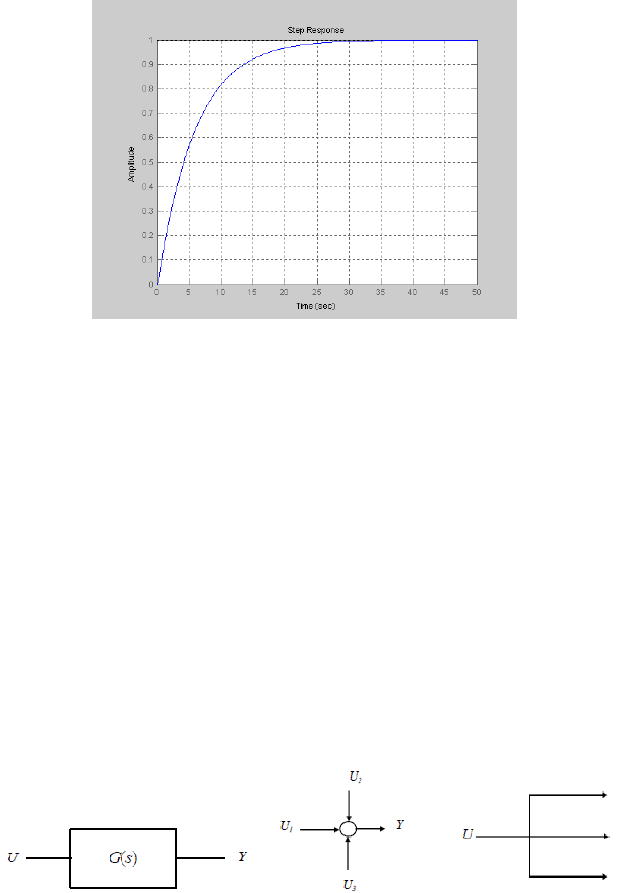
76 3 System Description
In fig. 3.22 the step response of the hydraulic system running under MATLAB
is shown. It is important to highlight that the state space representation used by
MATLAB coincides with the one here described except in the order of the state
variables
and
defined.
Fig. 3.22 MATLAB step response of the hydraulic system of example 3.8
3.7 Block Diagrams
In many dynamic systems, the system equations are described by the relationship
between input and output variables for each one of the component which
constitutes the whole system. In these cases it is easy to draw a block diagram that
represents the system dynamics and the components that comprises it.
A block diagram is an interconnection of blocks representing basic
mathematical operations in such a way that the whole diagram is equivalent to the
dynamic equations with its constitutive components. In a block diagram, system
variables are represented by lines interconnecting the blocks, and each block
represents the mathematical operation that produces the block output on the input
signal, expressed as a transfer function.
In addition to the functional blocks, the summing junction also appear to
express the addition and subtraction of variables and the pickoff points to transmit
system variables to various sections of the block diagram (fig. 3.23)
Fig. 3.23 Constitutive elements of a block diagram, block, summing junction and pickoff
point

3.7 Block Diagrams 77
The block diagram is obtained from the equations dynamics that describe the
behavior of each component, to which the Laplace transform was previously
applied, finally connecting the components of the complete block diagram.
Example 3.9
Obtain the block diagram of the electromechanical system of Example 3.7 starting
from the dynamic equations written as
by defining
and
as the system output and input respectively. Represent
the block diagram by using SIMULINK and obtain the step response for the
parameter values of
1,
5,
0.8, 1.5 and 0.2.
Solution
Applying the Laplace transform to the dynamic equations we have
Solving for
we get
1
and solving for we obtain