Dorst L., Fontijne D., Mann S. Geometric Algebra for Computer Science. An Object Oriented Approach to Geometry
Подождите немного. Документ загружается.

352 APPLICATIONS OF THE HOMOGENEOUS MODEL CHAPTER 12
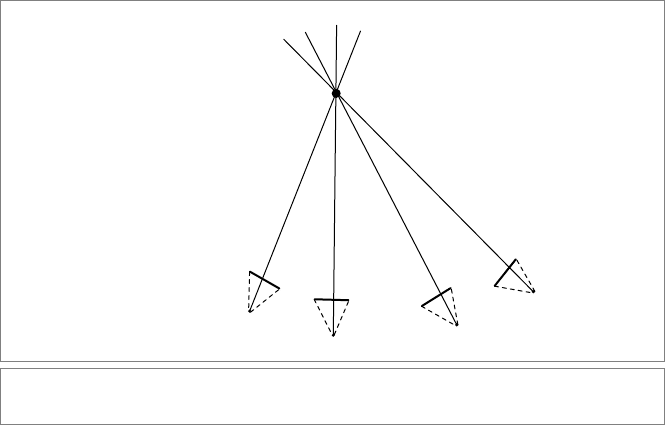
Marker
Image plane
Camera pinhole
Figure 12.7: Reconstruction of markers.
the marker center. This is illustrated in 2-D in Figure 12.7. Markers can of course be
occluded by the subject to which they are attached, so not all cameras can see every marker
all the time. The more cameras that actually see a particular marker, the more precise
the reconstruction can be. The simplistic marker reconstruction algorithm used in this
example reconstructs the markers as follows: we iterate over every pair of 2-D markers
from two different cameras. For each pair, we perform the following actions:
•
First, we construct a plane through the two camera centers and the 2-D marker in
the image plane of one camera. This plane is then intersected with the image plane
of the other camera to compute the epipolar line:
// normalizedPoints P1, P2 are the camera positions.
// normalizedPoint M1 is the marker position, on image plane of
// camera 1.
// plane IP2 is the image plane of camera 2.
// compute the epipolar line in the image plane of camera 2:
line L2 = _line(unit_r(dual(P1 ^ M1 ^ P2) << IP2));
•
Once we have the epipolar line, we search for 2-D markers sufficiently close to it (as
the data is inherently noisy, we will rarely have a precise intersection of the epipolar
line with a marker). We compute the distance of each candidate marker as (
M2*)L2:
// normalizedPoint M2 is the marker position, on image plane of
// camera 2
SECTION 12.5 PROGRAMMING EXAMPLES AND EXERCISES 353
// compute distance in image plane:
mv::Float distance = fabs(_Float((M2 << IP2) << L2));
The dual is of course taken relative to the image plane of the second camera.
•
If the distance is less than some epsilon value, we reconstruct a 3-D marker by
computing the average of the closest points on the two lines
P1 ∧ M1 and P2 ∧ M2.
We collect all reconstructed points in an array. How these points are computed is
described below.
After this loop, we iterate over all pairs of reconstructed 3-D markers to find the ones that
are sufficiently close in 3-D space (where close is typically defined as within the distance
of the radius of the marker). We merge close markers by summing them. We do not nor-
malize the points, as we use the
e0 coordinates as a rough counters for how many cameras
contributed to a particular reconstruction. We return only those markers that have been
seen by a sufficient number of cameras:
/*
R is the array of reconstructed 3D markers (candidates).
‘reconstructedMarkers’ is the final array of 3D markers
(normalizedPoints) that is returned to the caller.
*/
if ((int)R[i].e0() >= minNbCameras) {
reconstructedMarkers.push_back(_normalizedPoint(R[i] /
R[i].e0()));
}
When you read the full source code of the example in the GA sandbox source code pack-
age, you may encounter some use of the conformal model of the later chapters. Our actual
motion capture system is based primarily on the conformal model, hence this example
(which was derived from it to illustrate homogeneous model techniques) stores the cam-
era transformations as conformal versors.
A more refined reconstruction algorithm would use some kind of data structure to quickly
look up points close to particular epipolar lines. For each successful match in two cam-
eras, an initial 3-D marker is then reconstructed. These 3-D markers can subsequently be
projected onto the image planes of the other cameras, after which another data structure
(e.g., a spatial hashing table) can be used to quickly find markers in the v icinity of the
projected points. A least-squares-based solution (see Section 10.4.2) would then be used
to find the optimal reconstruction of the 3-D marker given the 2-D measurements in each
camera.
Computing Closest Points on Lines
Computing the closest points on two skew lines is an important operation that is
performed in the inner loop of by the reconstruction algorithm. We provide an efficient
geometric algebra implementation in Figure 12.8. The two lines are passed in factored
form (i.e., as points and directions such that the actual lines are
P1∧D1 and P2∧D2).
354 APPLICATIONS OF THE HOMOGENEOUS MODEL CHAPTER 12
bool closestPointsOnCrossingLines(
const normalizedPoint &P1, const h3ga::vector &D1,
const normalizedPoint &P2, const h3ga::vector &D2,
mv::Float &d1, mv::Float &d2) {
// Compute difference between starting points
h3ga::vector dif = _vector(P2 - P1);
// compute inverse pseudoscalar of space spanned by D1 and D2
bivector I = _bivector(D1 ^ D2);
if (_Float(norm_e2(I)) == 0.0f) // check parallel
return true; // returning true means ’lines are parallel’
bivector Ii = _bivector(inverse(I));
// compute reciprocals:
h3ga::vector rD1 = _vector(D2 << Ii);
h3ga::vector rD2 = _vector(D1 << Ii);
// solution:
d1 = _Float(rD1 << dif);
d2 = _Float(rD2 << dif);
return false;
}
Figure 12.8: Crossing lines code.
The function returns scalars d1 and d2 such that P1+d1∗ D1 and P2+d2∗ D2 are
the closest points on the two lines.
The function works by projecting the vector
P2—P1 onto the bivector D1∧D2. The geo-
metric intuition behind this is that we are trying to minimize the distance
P2—P1between
the two points by moving along the lines.
d1 and d2 are the coordinates of the projected
vector relative to the basis spanned by
D1 and D2. Because D1 and D2 are not orthonormal,
we need to compute their reciprocals (
rD1 and rD2) first.
13
THE CONFORMAL MODEL:
OPERATIONAL EUCLIDEAN
GEOMETRY
In the previous chapters, we studied the geometric algebra version of the homogeneous
model. The homogeneous model of Euclidean geometry is reasonably effective since it lin-
earizes Euclidean transformations, and geometric algebra extends the classical homoge-
neous coordinate techniques nicely through its outermorphisms. However, we remarked
that we were not able to use the full metric products of geometric algebra, since the met-
ric of the model was only indirectly related to the metric of the Euclidean space we had
wanted to model.
Fortunately, we can do better. In the next few chapters, we present the new conformal
model for Euclidean geometry, which can represent Euclidean transformations as orthog-
onal t ransformations. Encoding those as versors, we get the full power of geometric alge-
bra, including the structure preservation of all constructions.
In this chapter, we start the exposition by defining the new representational space (which
has two extra dimensions and an indefinite metric) and showing what its vectors repre-
sent. The two extra dimensions are geometrically interpretable as the point at the orig in
(as in the homogeneous model) and the point at infinit y (which nicely closes Euclidean
geometry, making translations into rotations around infinity).
We then focus on how to represent the familiar flats and directions already present in the
homogeneous model and how to move them around. As first applications, we use the
355
356 THE CONFORMAL MODEL: OPERATIONAL EUCLIDEAN GEOMETRY CHAPTER 13
versor representation to provide straightforward closed-form interpolation of rigid body
motions and universally valid constructions for the reflection of arbitrary elements.
The natural coordinate-free specification of elements and operations in the conformal
model is best appreciated using the interactive illustrations. Even more than in the pre-
vious chapters, we encourage you to play around with the interactive software provided
with this book.
13.1 THE CONFORMAL MODEL
The conformal model is especially designed for Euclidean geometry, which is the
geometry of transformations preserving the Euclidean distances of and within objects.
These Euclidean transformations are sometimes called isometries, and they include trans-
lations, rotations, reflections, and their compositions.
We will occasionally limit ourselves to Euclidean motions, which are the Euclidean trans-
formations that can be performed a little at a time. These are also known as rigid body
motions, and they consist of compositions of translations and rotations. They are proper
isometries, i.e., they preserve the Euclidean distances and handedness.
To emphasize that the conformal model involves the representation of Euclidean
geometry, we will denote the base space by
E
n
rather than R
n,0
. This notation is meant
to suggest that the group of Euclidean transformations is to be represented in the model
as well.
13.1.1 REPRESENTATIONAL SPACE AND METRIC
We start with some observations on points in a Euclidean space.
•
A Euclidean space E
n
has points at a well-defined distance from each other. If two
points P and Q were created by a translation over the Euclidean direction vectors p
and q from some origin O, then their squared distance is d
2
E
(P, Q) = p − q
2
=
(p − q) · (p − q ). In many respects, these squared distances are more convenient
to compute with than the actual distances; for instance, Pythagoras’ theorem states
that squared distances can be added under certain conditions.
•
Euclidean spaces do not really have an origin: there is no special finite point that can
be distinguished from other points. If an origin is used, it is for convenience, as a
point to relate other points to. Similarly, there are no preferential directions, though
it may be convenient to define an arbitrary standard frame at the equally arbitrary
origin.
•
Mathematicians have long known that it is convenient to close a Euclidean space
by augmenting it with a point at infinity. (They call this compactification.) That
point at infinity is a point in common to all lines and planes, and invariant under

SECTION 13.1 THE CONFORMAL MODEL 357
the Euclidean transformations. Having it explicit makes the algebraic patterns in
geometrical statement more universal.
1
When constructing a model for Euclidean geometry, we take these properties as central.
The arbitrariness of the origin was something we wanted in the homogeneous model, and
it was partly achieved by assigning an extra dimension to it in a representational space. So
we need at least need an (n+1)-dimensional representational space. We are now also going
to assign an extra dimension to the special point at infinity. In our model, we represent it
as a vector denoted as ∞, to remind us of what it is. (There will be no confusion with the
number infinity.) This turns our representational space for the n-dimensional Euclidean
space
E
n
from (n + 1)-dimensional to (n + 2)-dimensional.
The interface between geometry and algebraic representation is that we represent Euclidean
points in
E
n
by representative vectors in the (n + 2)-dimensional representational vector
space. The infinite point is represented by the vector ∞. A finite point P is represented by
avectorp, with certain additional properties that we specify below. Now we still have the
freedom to choose the metric of this representational space (and we must specify it if we
want to endow it with a geometric algebra). We use this metric to encode the Euclidean
distance in
E
n
. In view of the observed linear behavior of square distances we do so as
follows:
p · q ∼ d
2
E
(P, Q).
(13.1)
On the left you see the inner product of two vectors of the representational space; on
the right you see the squared distance of two points in the Euclidean space
E
n
.Theyare
directly proportional! (There are some scaling factors that we introduce below for back-
wards compatibility, but those are irrelevant to the principle of the setup.)
One immediate consequence of this definition of the metric is that a vector p representing
a finite point must obey p · p = 0, since the Euclidean distance of a point to itself is
zero: d
2
E
(P, P) = 0. Therefore, Euclidean points are represented by null vectors in the
representational model. A null vector is a vector with norm zero; in a Euclidean space,
such a vector would have to be the zero vector, and we could not use that to denote a
great variety of points. So the (n + 2)-dimensional representational space must be non-
Euclidean.
Null vectors may seem strange, but it is fairly easy to make them in a manner that feels
only moderately irregular. We may alternatively construct the (n + 2)-dimensional rep-
resentational space by augmenting the regular n Euclidean dimensions with two special
dimensions, for which a basis is formed by two vectors e and
-
e that square to +1 and −1,
respectively, and that are orthogonal (so that e·
-
e = 0). Having these, it is easy to make null
1 The homogeneous model has location-independent directions, which we identified as being characterized by
improper points on the heavenly sphere, but this has a different flavor than a single point at infinity, which is a
location that one can approach from
any direction. We will not lose those extra elements representing directions
for they are also found as elements in the new model.
358 THE CONFORMAL MODEL: OPERATIONAL EUCLIDEAN GEOMETRY CHAPTER 13
vectors out of them: the vectors (e +
-
e) and (
-
e − e) are both null without being zero, as you
can check easily by squaring them. In this construction, the representational space has an
orthonormal basis consisting of (n + 1) positive dimensions (with basis vectors squaring
to +1) and 1 negative dimension (with basis vector squaring to −1). We therefore denote
it by
R
n+1,1
. Such a space is called a Minkowski space in physics, where it has been well
studied to represent space-time in relativity; the negative dimension is then employed
to represent time. We will find a geometrically more natural basis than e and
-
e for the
conformal model, but the representational space is still the metric space
R
n+1,1
.
This (n + 2)-dimensional space requires n + 2 coefficients to specify a vector. We should
require only n coefficients to specify a point in Euclidean space, so there is more in this
space than we appear to need. Since points are represented by null vectors, their repre-
sentatives must obey p · p = 0, and this is a condition on their coefficients that removes
onedegreeoffreedom,leavingn + 1. The remaining degree of freedom we use to denote
the weight of the point, as in the homogeneous model. In that model, we retrieved the
weight as e
−1
0
· p, since it was the coefficient of e
0
; in the present model we extract it by
the operation −∞ · p. The relationship of inner product to distance of (13.1) should of
course be defined on properly normalized points, since it is independent of the weight,
so in that formula we should divide p by its weight, and q as well. We introduce an extra
scaling factor of −
1
2
for convenience later on, and actually define the inner product of
vectors representing points through
p
−∞ · p
·
q
−∞ · q
≡−
1
2
d
2
E
(P, Q). (13.2)
(The two minus signs on the left of course cancel each other, but we would like to get you
used to viewing −∞ · p as a weight-computing expression.) Equation (13.2) is in fact the
definition of the representational model; all the rest of the correspondence between ele-
ments of its geometric algebra and Euclidean geometry follows from it without additional
assumptions.
The model thus constructed was called the conformal model in the literature, for the
mathematical reason that it is capable of representing conformal transformations by ver-
sors. We will demonstrate that in Chapter 16, but prefer to focus on its use for Euclidean
transformations first. We will show that it is an operational model for Euclidean geom-
etry in the double sense that Euclidean transformations are represented as structure-
preserving operators, which are moreover easy to put to operational use. In view of that,
we would prefer to call it the operational model for Euclidean computations. This is too
much of a mouthful, so we might as well conform to the term conformal model, despite
its arcane origins.
Even though the conformal model hit computer science only a few years ago, when it was
introduced by Hestenes et al. in 1999 [31], we are beginning to find that we could have had
the pleasure of its use all along. Considerable elements of it are found in much older work,
and it appears to have been reinvented several times. We do not know the whole story yet,
SECTION 13.1 THE CONFORMAL MODEL 359
but markers on the way are Wachter (a student of Gauss), Cox [9] and Forder 1941 [22]
(who used Grassmann algebra to treat circles and their properties), Angl
`
es 1980 [2] (who
showed the crucial versor form of the conformal transformations) and Hestenes (who
had already presented it in his 1984 book [33] but only later realized its true importance
for Euclidean geometry). We are convinced that its time of general adaptation has finally
arrived, since the conformal model is much more clearly useful to actually programming
geometrical applications than it is to theorizing about geometry on paper.
13.1.2 POINTS AS NULL VECTORS
Let us be more precise about the point representation. As we realized before, the relation-
ship of the metric to the Euclidean distance implies that finite points are represented by
null vectors. What about the point at infinity?
The point at infinity is represented by ∞, and it should have infinite distance to all finite
points. Substituting q = ∞ in (13.2), we find that an infinite result is reached only if we
set ∞·∞= 0. This implies that the point at infinity is also represented by a null vector.
Null vectors in the conformal model
R
n+1,1
represent Euclidean points of E
n
(both finite and infinite).
After you have gotten used to this correspondence, it becomes natural to identify repre-
sentative null vectors with points and talk about the null vector p as “the point p” rather
than as “representing the point P.” We will gradually slip into that convenient usage as
this chapter evolves.
We call a point p normalized or a unit point when its weight equals 1:
−∞ · p = 1
We may be tempted to select one special unit point O as the origin of our space and
represent it by a vector denoted o. It would then be a special vector in the conformal
model with the property o ·∞ = −1,aswellaso · o = 0, by virtue of being a point. It
therefore appears to bear a special relationship to the vector ∞ representing the point
at infinity: though both are null vectors, they are (minus) each other’s reciprocals in
the sense that o ·∞ = −1. That simplifies the math of computing with them, and it
reveals that the weight of a point is the coefficient of o of its representative vector (for a
coefficient of a vector is retrieved by an inner product with its reciprocal, as we saw in
Section 3.8—so the o coefficient is retrieved by an inner product with −∞). The strong
parallel with e
0
and e
−1
0
in the homogeneous model suggests that an arbitrary unit point
might be writable as o + p, but this is not a null vector (it squares to p
2
). We should
use the extr a dimension to represent a unit point as p = o + p + α ∞, with an α that
should be determined by the null vector condition p · p = 0. You can easily verify that
this gives
360 THE CONFORMAL MODEL: OPERATIONAL EUCLIDEAN GEOMETRY CHAPTER 13
p = o + p +
1
2
p
2
∞ (13.3)
as the representative null vector for a unit point relative to the origin o.
2
Equation (13.3) resembles a coordinate representation of the vector p in terms of a purely
Euclidean location vector p and two extra terms in a {o, ∞}-basis for the extra two dimen-
sions of the conformal model. It is somewhat misleading: although ∞ indeed has special
significance, the origin point o does not. Any unit point could have been used as origin; it
would have had the same relationships with ∞ (since any finite point p obeys −∞·p = 1),
and would merely have changed the value of the location vector p for the particular point
P we are considering. So (13.3) is deceptive in that it is too specific. Still, it is convenient
to have, since it gives a connection to the homogeneous representation (o is like e
0
), and
even to the vector space model (in exhibiting the Euclidean location vector p). You can
use it when you begin to work with the conformal model—as you advance, you will dare
to work coordinate-free, merely using the algebraic properties of the point p, and that will
make your formulas and algorithms more generally applicable.
But while we have this specific representation, let us use it to verify the consistency with
the original definition of the metric:
p · q = (o + p +
1
2
p
2
∞) · (o + q +
1
2
q
2
∞)
= −
1
2
q
2
+ p · q −
1
2
p
2
= −
1
2
(q − p)
2
. (13.4)
Note how the metric of the conformal model plays precisely the r ight role to compose the
correct terms in the squared difference required to express the Euclidean distance. So the
conformal model indeed does what it was designed to do.
Letting p become large in (13.3), the dominant term is proportional to +∞. This shows
the reason for our choosing the normalization such that ∞·p is negative: now +∞ is
positively proportional to (the vector representing) the point at infinity.
We are especially interested in the Euclidean space
E
3
, and when required, we use an
orthonormal basis {e
1
,e
2
,e
3
} for that part of the representation. That leaves the other
two elements in the basis of
R
n+1,1
. Earlier, we briefly introduced the basis {e,
-
e} with
their squares of +1 and −1, and that would work as basis for the part
R
1,1
. But it is often
geometrically more significant to make a change of basis to the two null vectors o and
∞, representing our arbitrary origin and the point at infinity. These null vectors can be
defined in terms of e and
-
e as
2 We should mention that the standards in this new model have not quite been established yet, and you may find
other authors with different definitions and notations of the elements we have denoted
∞ and o, differing by a
factor of
±1 or ±2 with our definition. For instance, in [15] our ∞ is their −n, and our o is their −
1
2
-
n, so that their
point representation reads
p = p
2
n + 2p −
-
n, with normalization p · n = 2. Any rescaling of ∞ is a trivial change to
the conformal model, not affecting its structure in any way, though it is a bit annoying in cross-referencing texts
from various sources. Always check the local definitions! We will give our reasons for our choices.

SECTION 13.1 THE CONFORMAL MODEL 361
o =
1
2
(e +
-
e), ∞ =
-
e − e, (13.5)
giving conversely
e = o −
1
2
∞;
-
e = o +
1
2
∞. (13.6)
So in terms of a basis, this is just a simple coordinate change in the representational
subspace with pseudoscalar e ∧
-
e = o ∧∞. We reiterate that any finite unit point could
have been used instead of o without changing these defining equations (picking another
point as origin merely changes where we attach the Euclidean part
E
n
to the basis for R
1,1
,
and therefore just changes the Euclidean vectors by an offset). For
E
3
, the basis elements
have the inner product multiplication tables of Table 13.1. We can define the pseudoscalar
by I
3
= e
1
∧ e
2
∧ e
3
.
But throughout the remainder, we will avoid the use of the basis to specify elements. We
shall hardly need it, for the Euclidean covariance properties of the conformal model will
make computations in it delightfully coordinate-free.
13.1.3 GENERAL VECTORS REPRESENT DUAL PLANES
AND SPHERES
By construction, some of the vectors in the representational space R
n+1,1
represent
weighted points of the Euclidean space; namely all null vectors, which must satisfy
p · p = 0. Yet there are many more vectors in
R
n+1,1
. We should investigate whether those
are also useful to represent elements of Euclidean geometry. And indeed they are: we will
find that they are generally dual spheres (with points and dual planes included as special
cases for radius zero and infinity, respectively).
To determine what such a nonnull vector v signifies, we should somehow use our funda-
mental definition of (13.2), since that is all that we have up to this point. Therefore we
probe the vector v with a unit point x, solving the equation x · v = 0 to find out what v is
when considered as defining a Euclidean point set in this manner. Note that this already
implies that we interpret a vector v as the dual representation of some Euclidean element.
Table13.1: Multiplication table for the inner product of the conformal model of 3-D Euclidean
geometry
E
3
, for two choices of basis.
e e
1
e
2
e
3
-
e
e 1 0 0 0 0
e
1
0 1 0 0 0
e
2
0 0 1 0 0
e
3
0 0 0 1 0
-
e
0 0 0 0 −1
o e
1
e
2
e
3
∞
o 0 0 0 0 −1
e
1
0 1 0 0 0
e
2
0 0 1 0 0
e
3
0 0 0 1 0
∞ −1 0 0 0 0