Dorst L., Fontijne D., Mann S. Geometric Algebra for Computer Science. An Object Oriented Approach to Geometry
Подождите немного. Документ загружается.

362 THE CONFORMAL MODEL: OPERATIONAL EUCLIDEAN GEOMETRY CHAPTER 13
It is perhaps a bit surprising that we meet these dual representations of elements before
the direct interpretations. (Actually, something similar happened with the vectors of the
homogeneous model. There, a vector of the form e
0
+ p represented a point, a vector of
the form u was a direction, and a vector n − δe
−1
0
= n ∓ δe
0
represented a dual plane).
•
Null V ector p = α (o + p +
1
2
p
2
∞): Point. We may as well first verify that this prob-
ing procedure gives the right interpretation for a general null vector of the form we
saw before. Our earlier computation (13.4) gives x · p = −
1
2
α (p − x)
2
, so that this
is zero if and only if x = p. Therefore x must be a point at the same location as p,
albeit possibly with a different weight.
3
As we have seen, a vector p representing a point satisfies p
2
= 0, and ∞·p = −α.
These properties define this class of vector of
R
n+1,1
representing a point of E
n
.The
prototype of this class is the vector o representing the point O at the arbitrary origin.
•
Vector without o Component: π = n + δ∞: Dual Plane.Avectorπ without an
o component has the general form π = n + δ∞. It clearly does not represent a
Euclidean point. We probe it to find out what it is in the Euclidean space:
x · π = (o + x +
1
2
x
2
∞) · (n + δ∞) = x · n − δ,
and demanding this to be zero retrieves the familiar dual plane equation for a plane
with normal vector n at a distance δ/n from the origin. Therefore, the vector π
dually represents a Euclidean plane. We will denote dual planes by π-based symbols
(and direct planes by symbols based on Π).
Such a dual plane vector satisfies ∞·π = 0 and π
2
= n
2
, defining the type. The
equation ∞·π = 0 can be interpreted as: ∞ lies on the dual plane π. The prototypical
member of this class is the vector n of
R
n+1,1
that lies completely in its subspace E
n
(and hence is denoted in bold font).
•
General Vector σ
±
= α (c ∓
1
2
ρ
2
∞): Dual Sphere. A gener al vector can be made as a
scaled version of a null vector with an additional amount of ∞-component to make
it nonnull. Let us write it as σ = α (c + β ∞), with c a unit point representative (so
that c
2
= 0, and −∞ · c = 1). Then we find
x · σ = α (x · c + β x ·∞) = α
−
1
2
d
2
E
(x,c) − β
.
Requiring this to be zero gives the equation x − c
2
= −2β, where we substituted
the Euclidean distance between x and c as x − c.Ifβ is negative, we redefine it as
β = −
1
2
ρ
2
, and obtain
3 Note however that there is something slightly uncomfortable going on: strictly speaking, if x is a point, then p
must be the dual representation of a point (since it is the solution of x·p = 0), rather than the direct representation
(which would be the solution of
x∧p = 0). Strangely enough, p is both, due to the special nature of null vectors. For
x∧p = 0 is certainly valid for x = p, and computing: x∧p = (o+x+
1
2
x
2
∞)∧α (o+p+
1
2
p
2
∞) = α o∧(p−x)+···, and
already the first term shows that we can only make this zero by having
x = p, so that x = p is indeed the unique
solution. We get back to the dual nature of the point representation when we treat the
plunge in Section 15.1.
SECTION 13.1 THE CONFORMAL MODEL 363
x − c
2
= ρ
2
.
We recognize the equation of a sphere with center at the location c, and radius ρ.
A general vector of the form σ = α (c −
1
2
ρ
2
∞) dually represents a Euclidean
sphere with center c and radius ρ, and weight α.
If β is positive, we can set it equal to
1
2
ρ
2
, and we obtain the equation
x − c
2
= −ρ
2
.
By analogy, this represents an imaginary sphere whose squared radius is negative.
We do not need complex numbers to define it as long as we only represent squares
of distances (which is indeed all that entered our model by its definition).
A ge neral vector of the form σ = α (c +
1
2
ρ
2
∞) dually represents an imaginary
sphere with center c and squared radius −ρ
2
, and weig ht α.
These imaginary spheres may appear useless, but they occur naturally as solutions
to intersections and in duality computations. They keep our algebra consistent and
closed, and we will try to develop a feeling for them (yes, you can learn to see imag-
inar y spheres, in Section 15.1.3).
The dual sphere vectors satisfy σ
2
= ±α
2
ρ
2
and −∞ · σ = α, so that a unit-weight
sphere has the same square as its radius. The null vectors representing points can
now be viewed as (dual) spheres of zero radius, which makes good geometric sense.
Prototypical examples of this class are the vectors e = o −∞/2 and
-
e = o + ∞/2,
which represent the real and imaginary unit spheres at the origin.
This completes the Euclidean interpretation of the representational vectors in the con-
formal model; the results are collected in Table 13.2. The extension of the homogeneous
Table 13.2: The interpretation of vectors in the conformal model.
Element Form Characteristics
Point p = α (o + p +
1
2
p
2
∞) p
2
= 0 −∞ · p = 0
Dual plane π = n + δ ∞ π
2
= 0 −∞ · π = 0
Dual real sphere σ = α (p −
1
2
ρ
2
∞) σ
2
= ρ
2
> 0 −∞ · σ = 0
Dual imaginary sphere σ = α (p +
1
2
ρ
2
∞) σ
2
= ρ
2
< 0 −∞ · σ = 0
364 THE CONFORMAL MODEL: OPERATIONAL EUCLIDEAN GEOMETRY CHAPTER 13
model by the extra dimension ∞, and the modification of the metric, have already given
us (dual) spheres as typical Euclidean elements (with a point as a zero-radius sphere and
a plane as an improper sphere that passes through infinity). This carries it beyond the
homogeneous model, which could only represent flats. Clearly the set of transformations
preserving properties of spheres are more limited than those preserving properties of flats,
so the conformal model will be more specifically tailored to Euclidean geomet ry than the
homogeneous model. The affine transformations in particular, which preserved the flats of
the homogeneous model, are no longer all admissible since they may not preserve spheres.
This loss is in fact a gain: the added precision makes the conformal model much more
powerful for the treatment of Euclidean transformations than the homogeneous model.
We are obviously going to invoke the geometric algebra structure of the conformal model
to make more involved elements from the dual planes and dual spheres at our disposal, but
this will have to wait until the next chapter. In this chapter, we explore how the Euclidean
transformations can be represented in the new model, and how that improves and extends
the capabilities of the homogeneous model.
13.2 EUCLIDEAN TRANSFORMATIONS AS VERSORS
The crucial Euclidean property of point distance was embedded in terms of the inner
product of the representational space
R
n+1,1
by (13.2). Euclidean transformations in E
n
are isometries: they preserve distances of points, so they should be represented by trans-
formations of
R
n+1,1
that preserve the inner product. Such transformations are therefore
orthogonal transformations of the representational space. We know from Section 7.6 that
geometric algebra can represent orthogonal transformations as versors. Therefore:
Euclidean transformations are representable by versors in the conformal model.
Since versors have structure-preserving properties, all constructions that we make using
the geometric algebra of
R
n+1,1
will transform nicely (i.e., covariantly) in that algebra—
which implies that they move properly with the Euclidean transformations. We never need
to enforce that; it is intrinsically true due to the versor structure. This kind of operational
model is very intuitive to use (for you can make a construction somewhere, and it will hold
anywhere). The conformal model is the smallest known algebr a that can model Euclidean
transformations in this structure-preserving manner.
13.2.1 EUCLIDEAN VERSORS
Representing Euclidean transformations by versors is the plan, but when we put it into
action we have to be bit more precise. Not just any versor in the algebra of
R
n+1,1
is a
Euclidean motion: it also needs to preserve the vector ∞, since that is an essential part
of the modeling interface between the inner product and its interpretation as Euclidean
distance in (13.2). Such a versor induces an operation in the Euclidean base space that
preserves the point at infinity, which is indeed a property of Euclidean transformations.

SECTION 13.2 EUCLIDEAN TRANSFORMATIONS AS VERSORS 365
So in the conformal model, a Euclidean transformation is represented by a versor V that
preserves ∞. Using the versor product formula of (7.17), this gives
V ∞ V
−1
= ∞.
It follows that ∞ V −
V ∞ = 0, so that ∞V = 0 is the condition on a versor V to be a
Euclidean versor.
The simplest versor is a vector; and the most general vector that satisfies ∞V = 0 is
π = n + δ∞. This represents a dual plane. All other Euclidean transformation versors
should be products of such vectors; in the base space, we would phrase that as
All Euclidean transformations can be made by multiple reflections in well-chosen
planes.
This well-known fact from Euclidean geometry is the key to designing the Euclidean trans-
formation versors in
R
n+1,1
.
13.2.2 PROPER EUCLIDEAN MOTIONS AS EVEN VERSORS
We showed in Part I that an odd number of reflections will produce a transformation with
determinant −1 (Section 7.6.2). The resulting versor represents an improper motion: it
changes handedness, and therefore cannot be perfor med as a continuous motion. Proper,
continuous Euclidean motions preserve handedness and are represented by even versors,
which we can normalize to be rotors. There are two elementary proper motions: pure
translations and pure rotations. They can of course be composed to make general proper
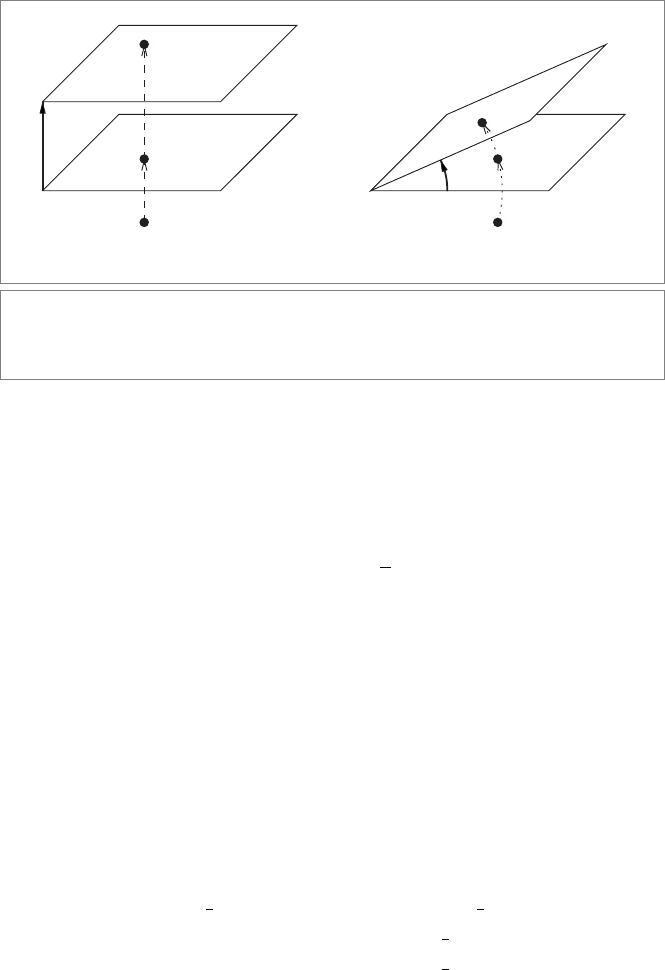
motions. We construct their versors, and illustrate this in Figure 13.1.
•
Translations. As a special case of versor composition, we compute the product of
two reflecting parallel planes with the same direction but at a differing location, as
in Figure 13.1(a). Let n be their unit normal vector, then we compute
(n + δ
2
∞)(n + δ
1
∞) = 1 − (δ
2
− δ
1
) n ∞≡1 − t∞/2 ≡ T
t
,
where we define the Euclidean translation vector t ≡ 2(δ
2
− δ
1
)n. Geometrically,
we would expect this double reflection to represent a translation in the direction n,
over twice the distance of the reflecting planes (i.e., over t).
For a point at the (arbitrary) origin o, this behavior is easily checked:
T
t
oT
−1
t
= (1 − t ∞/2) o (1 + t ∞/2)
= o −
1
2
(t ∞ o − o t ∞) − t ∞ o t ∞/4
= o − t (∞·o) −∞(2o ·∞−∞o) t
2
/4
= o + t +
1
2
t
2
∞≡t.
(Verify this computation carefully, as it contains techniques you will frequently use.)
This is the representative of the point t at location t relative to the origin o,sowe
366 THE CONFORMAL MODEL: OPERATIONAL EUCLIDEAN GEOMETRY CHAPTER 13
(a) (b)
φ/2
t/2
π
2
π
1
π
2
π
1
Figure 13.1: The versors for the Euclidean transformations can be constructed as multi-
ple reflections in well-chosen planes. (a) Two parallel planes make a translation, and (b) two
intersecting planes make a rotation.
have indeed found the translation versor. This versor is even a rotor, for T
t
T
t
=
(1 − t ∞/2) (1 + t ∞/2) = 1 − t ∞ t ∞/4 = 1 + t
2
∞
2
/4 = 1.
Like all rotors in
R
n+1,1
, the translation rotor has an exponential representation.
This is easy to construct from the fact that ∞ squares to 0:
T
t
= 1 − t ∞/2 = 1 + (−t∞/2) +
1
2!
(−t∞/2)
2
+ ··· = e
−t∞/2
.
The Taylor expansion of the exponential truncates by itself, after the first-order
term. We foresaw such unusual rotors when discussing the exponential in Sec-
tion 7.4.2.
•
Rotations in the Origin. If we consider two planes in the origin as in Figure 13.1(b),
these are dually represented as the purely Euclidean vectors π
1
= n
1
and π
2
=
n
2
. Viewed as reflection versors, we may take these as unit vectors without loss of
generality. Their product is the versor
π
2
π
1
= n
2
n
1
,
in which we recognize the purely Euclidean rotor R. Let us check what it does on a
point, represented as a vector of R
n+1,1
:
R (o + p +
1
2
p
2
∞)R
−1
= RoR
−1
+ R p R
−1
+
1
2
p
2
(R ∞ R
−1
)
= o + (R p R
−1
) +
1
2
p
2
∞
= o + (R p R
−1
) +
1
2
(R pR
−1
)
2
∞,
which holds simply because the elements o and ∞ commute with the purely
Euclidean elements. This is indeed the representation of the point at location
SECTION 13.2 EUCLIDEAN TRANSFORMATIONS AS VERSORS 367
R p R
−1
, so successive reflections in planes through the origin are a rotation in a
plane through the origin. This was also the case in the vector space model when we
introduced its rotors in Chapter 7 (and therefore also in the homogeneous model).
This rotor representation of rotations is therefore nicely backwards compatible: it is
literally the same as in the vector space model contained in the space
R
n+1,1
, and it
merely acts on the whole space now.
Since this rotor is completely Euclidean, the earlier results of Chapter 7 and the
vector space model in Chapter 10 apply, and we can write it as
R = e
−I/2
= cos(/2) − sin(/2) I
in terms of its rotation plane I and rotation angle .
•
General Rigid Body Motions. A general rigid body motion can be constructed by
first doing a rotation in the origin and following it by a translation. That gives a
rotor of the form
(1 − t∞/2) R.
This generally contains terms of grades 0, 2, and 4. Being a rotor, the general rigid
body motion can also be written in exponential form, but this is a bit involved: it
requires viewing it as a screw motion (i.e., a rotation around a general axis combined
with a translation along that axis). We will get back to analyzing and interpreting
such motions in Section 13.5.2.
The above shows how the Euclidean proper motions are represented as rotors (i.e., as even
unit versors). Improper Euclidean motions can be represented by odd unit versors (just
multiply by a vector representing a dual reflection plane).
As a shorthand of the linear transformation produced by the application of T
t
in a versor
product, we will use
T
t
[·] (note the sans serif font). For the linear transformation of the
rotor R
I
, we may use the notation R
I
[·] (though we may conveniently drop the reference
to the bivector angle).
13.2.3 COVARIANT PRESERVATION OF STRUCTURE
By representing Euclidean transformations as versors, we have achieved an important
algebraic milestone in computing with Euclidean spaces, with far-reaching geometric
consequences: automatic structure-preservation of all our constructions, in the sense of
Section 7.6.3. By this we mean that a construction made anywhere, in any orientation,
will automatically transform properly under a Euclidean motion.
As an example, we have just seen how we make a rotation by reflection in two planes
passing through a point o as the product R = π
2
π
1
. If we now would want to have a
similar rotation at a point p, we could define that new rotation by moving both planes to
p by a translation versor T
p
and making the computation π
1p
π
2p
for the moved planes

368 THE CONFORMAL MODEL: OPERATIONAL EUCLIDEAN GEOMETRY CHAPTER 13
π
1p
≡ T
p
π
1
T
−1
p
and π
2p
≡ T
p
π
2
T
−1
p
. But when we do this, we find that this is the same as
applying the translation T
p
to the original rotor R, for π
1p
π
2p
= T
p
π
1
T
−1
p
T
p
π
2
T
−1
p
=
T
p
π
1
π
2
T
−1
p
= T
p
RT
−1
p
. The rotor of the moved planes is the moved rotor of the planes!
This is of course what we want for our original construction to be geomet rically meaning-
ful: it should transfer to another location in precisely this covariant manner (co-variant,
implying: varying with the change) under the transformations of Euclidean geomet ry. We
have effectively used similarity under Euclidean transformations as a generative principle
rather than as a property to check afterwards.
It should be clear from this example that it is precisely the versor representation that makes
this covariant structure preservation work so automatically, and that it should therefore
work for any Euclidean transformation (since they are all represented by versors in the
conformal model). We discuss the abstract principle involved in some detail, so that we
can apply it throughout the remainder of this chapter. The most important structure-
preservation properties of the versor product are easily proved.
•
The versor product preserves the structure of a geometric product:
V[XY] = V[X] V[Y].
Proof:
4
Use associativity: V (XY) V
−1
= VXYV
−1
= VXV
−1
VYV
−1
=
(VXV
−1
)(VYV
−1
).
•
Theversorproductislinear:
V[α X + β Y] = α V[X] + β V[Y].
Proof: V (α X + β Y) V
−1
= α VXV
−1
+ β VYV
−1
.
•
Theversorproductisgrade-preserving:
V[X]
k
= V[X
k
].
Proof: Grades are defined in terms of the number of factors in an outer product.
An outer product can be written as a sum of geometric products, and under trans-
formation each of its terms transforms in a structure-preserving manner. The fac-
torization of the transform is the transform of the factorization, and therefore the
number of (transformed) vector factors in the outer product is preserved.
In Part I, we saw that we construct all objects and operators in geometric algebra using
only these constructive elements (either as linear combinations of geometric products or
by grade selection). Therefore the versors preserve all constructions, even including
meet
and join, inverses, and duality. So the universal structure preservation of constructions
can be denoted compactly as
V (A ◦ B) V
−1
= (VAV
−1
) ◦ (VBV
−1
),
where ◦ may be substituted by any of the products ∧, , , ∗, ∩, ∪.
4 For structural clarity, we suppressed the signs in (7.18), which really should be there. You can easily verify that
the result still holds when these are included.
SECTION 13.2 EUCLIDEAN TRANSFORMATIONS AS VERSORS 369
This leads to the operational model principle, of which the conformal model is merely
one manifestation:
If we have managed to construct a geometric algebra in which useful transformations
(motions) in the base space are represented as versors, then all constructions in the
model transform covariantly (i.e., with preservation of their structure).
We implicitly used this principle for rotations in the vector space model, which is why that
is the operational model for directions in space. The homogeneous model aug mented it
with translations as linear transformations, but not as versors, which is why it had some
problems preserving the structure of constructions (notably the metric properties). In
the conformal model we finally have the Euclidean transformations as versors, so all con-
structions should be covariant under Euclidean transformations. It is the smallest known
model that can do this. Operational models for other important geometries (such as pro-
jective geometry) have yet to be developed.
13.2.4 THE INVARIANCE OF PROPERTIES
Structure preservation is useful in analyzing and constructing all elements in the conformal
model: it saves work. Since we have the Euclidean transformations available, we need to
focus only on standardized elements at the origin (which is arbitrary anyway) to determine
their form and defining equations. We can always move them to their desired location and
orientation later. But are we guaranteed that their defining properties are preserved under
such a transformation? For instance, could a point become a dual sphere or a dual plane?
They are all represented as vectors, and could these not change into each other?
This brings us to how the characteristic properties change, that determine the interpre-
tation of a representative element. For vectors, these proper ties were given in Table 13.2.
They express that some combination of products is equal to a scalar. That algebraic form
already guarantees that they are structurally preserved. To take an example, we have seen
above how a unit point t at location t can be made by translation of a unit point at the
origin: t = T
t
oT
−1
t
. But how do we know that it is still a unit point and not a dual sphere
or dual plane? Of the original point o, we knew that o
2
= 0 and −∞ · o = 1. Since these
conditions are completely expressed in terms of the products of geometric algebra, they
transform covariantly under the Euclidean transformation of translation, so we can relate
the properties of t to those of o:
tt= T
t
oT
−1
t
T
t
oT
−1
t
= T
t
ooT
−1
t
= T
t
0 T
−1
t
= 0,
so indeed, t is also a point. Moreover,
−∞ · t = −∞ · (T
t
oT
−1
t
) = −(T
t
∞ T
−1
t
) · (T
t
oT
−1
t
) = −T
t
(∞·o) T
−1
t
= 1,
so t also has unit weight. Note that in the der ivation of weight preservation, it is essential
that ∞ is an invariant of the translation: it does not change, so the normalization equation
preserves its form after transformation.
370 THE CONFORMAL MODEL: OPERATIONAL EUCLIDEAN GEOMETRY CHAPTER 13
Characteristic properties expressed as scalar conditions in terms of the products and ∞
are automatically invariants of the Euclidean transformations.
In summary, as long as we construct elements and their defining properties in terms
of the products of the geometric algebra of the operational model
R
n+1,1
,weare
automatically guaranteed of their covariance (for the elements) and invariance (for
their properties) under Euclidean transformations. So we can construct everything
around the origin, and yet get a full inventory of the general possibilities. With that
labor-saving capability, we are ready to construct and inter pret general blades of
R
n+1,1
effectively.
13.3 FLATS AND DIRECTIONS
Let us embed the geometrical elements of the homogeneous model into the conformal
model, and investigate how the versor properties empower our geometr ic representation.
We originally started our exploration of the conformal model in Section 13.1.3 by
interpreting vectors, which turned out to be the dual representations of spheres (real,
imaginary, or zero radius), hyperplanes, and the point at infinity. To establish the
correspondence with the vector space model and the homogeneous model, we now
prefer instead to construct the direct representations of elements. The two repre-
sentations are of course related by duality, so none is more fundamental than the
other, but it is more natural to assign orientations to flats (and spheres) in the direct
representation—and then dualization automatically introduces some grade-dependent
orientation signs in their corresponding duals, which are good to get straight once and
for all.
Constructing direct representations implies that we use the outer product ∧, both for con-
structing the elements (as blades A) and for testing what Euclidean point set it represents
(by solving x ∧ A = 0).
13.3.1 THE DIRECT REPRESENTATION OF FLATS
We start constructing an element of the form
X = α (p
0
∧ p
1
∧···∧p
k
∧∞),
by which we mean the weighted outer product of k+1 unit points and the point at infinity
∞. This clearly contains the point at infinity (since ∞∧X = 0), and we will find out that
such a blade is the direct representation of a k-flat in the conformal model (i.e., an offset
k-dimensional linear subspace of
E
n
). We do so by rewriting the blade to a form that we
mostly recognize from the homogeneous model. This is done in three steps: standardiza-
tion, interpretation, and generalization.
SECTION 13.3 FLATS AND DIRECTIONS 371
Standardization
By the structure preservation principle, we still have the general form if we take p
0
to be
the arbitrary origin o (and we can view this either as moving the whole blade X back to
the origin to make p
0
coincide with o, or as choosing p
0
as the origin of our representa-
tion). Note that the invariance of ∞ is essential (if it changed under translation, the form
of the expression would not be the same at the origin). So we have reduced the element
X to
X = α (o ∧ p
1
∧···∧p
k
∧∞).
Now because the outer product is antisymmetric, we can subtract one of the factors from
each of the others without changing the value of the product (the extra terms would pro-
duce zero, a∧b = a ∧ (b−a) being the prime example). We subtract o, and get the element
X into the form:
X = α
o ∧ (p
1
− o) ∧···∧(p
k
− o) ∧∞
.
We substitute the general form of the point representation of (13.3), setting p
i
= o + p
i
+
1
2
p
2
i
∞, to obtain:
X = α
o ∧ (p
1
+
1
2
p
2
1
∞) ∧···∧(p
k
+
1
2
p
2
k
∞) ∧∞
.
The outer product with ∞ eliminates the extra terms
1
2
p
2
i
∞.Sowehave:
X = α (o ∧ p
1
∧···∧p
k
∧∞).
We can now reduce the part involving the vectors p
i
to a purely Euclidean k-blade A
k
, into
which we also absorb the weight α, defining A
k
= α p
1
∧···∧p
k
. We therefore ultimately
find that this class of blade is equivalent to:
X = o ∧ A
k
∧∞,
a much simplified form.
Interpretation
To find the Euclidean interpretation of X = o ∧ A
k
∧∞as a direct blade, we probe it with
a point x and solve x ∧ (o ∧ A
k
∧∞) = 0; that should give the set of Euclidean points it
represents. Let us bring this into a more familiar form by expanding x as o + x +
1
2
x
2
∞.
We immediately realize that the outer products with o and ∞ eliminate the first and last
term of this point representation, so we effectively can substitute x = x without changing
the solution:
0 = x ∧ o ∧ A
k
∧∞= x ∧ o ∧ A
k
∧∞.
Therefore we need to solve x ∧ o ∧ A
k
∧∞ = 0. This equation contains a purely Euclidean
part (x ∧ A
k
) and a non-Euclidean part (o ∧∞). These are orthogonal, so that their outer