Francoise J.-P., Naber G.L., Tsun T.S. (editors) Encyclopedia of Mathematical Physics
Подождите немного. Документ загружается.


Supermanifolds
F A Rogers, King’s College London, London, UK
ª 2006 Elsevier Ltd. All rights reserved.
Introduction
A supermanifold is a generalization of a classical
manifold to include coordinates that are in some
sense anticommuting. Much of the motivation for
the study of supermanifolds comes from super-
symmetric physics, where it is useful to have a
formalism which treats fermions and bosons in the
same way. The underlying reason for the effective-
ness of supermanifolds is that anticommuting
coordinates allow the fermionic canonical anti-
commutation relations to be handled in a way
analogous to the bosonic canonical commutation
relations. Supersymmetric methods have proved
immensely effective in fundamental physics; they
also play a considerable role in geometrical index
theory in mathematics. In this article we describe
supermanifolds from two points of view – geometric
and algebraic – and consider some of the standard
features of manifold calculus, including integration
since this is an area where the distinctive features of
this generalized geometry are particularly apparent.
One situation where supermanifolds are used in
physics is in the superspace formulation of super-
gravity, where the physical fields are found in the
component fields in the Taylor expansion of func-
tions on the supermanifold in anticommuting vari-
ables. More fundamentally, the symmetry groups of
supersymmetric theories have commuting and anti-
commuting generators, and are examples of super Lie
groups, which are supermanifolds with a compatible
group structure.
Some Algebraic Preliminaries
The coordinates of a supermanifold have particular
algebraic features which are best understood by
introducing some of the basic concepts of super-
algebra. (The word super here does not imply
superiority, simply the extension of some classical
concept to have odd as well as even, anticommuting
as well as commuting, elements.) A ‘‘super vector
space’’ is a vector space V together with a direct sum
decomposition
V ¼ V
0
V
1
½1
The subspaces V
0
and V
1
are referred to, respec-
tively, as the even and odd parts of V. A general
element v of V thus has the unique decomposition
v = v
0
þ v
1
with v
0
in V
0
and v
1
in V
1
. We will
normally consider homogeneous elements, that is,
elements v which are either even or odd, with parity
denoted by jvj, so that jvj= i if v is in V
i
, i = 0, 1.
(Arithmetic of parity indices i = 0, 1 is always
modulo 2.) A superalgebra is a super vector space
whose elements can be multiplied together in such a
way that the product of an even element with an
even element and that of an odd element with an
odd element are both even, while the product of an
odd element with an even element is odd; more
formally:
Definition 1
130 Supermanifolds
(128)
(i) A ‘‘superalgebra’’ is a super vector space
A = A
0
A
1
which is also an algebra which
satisfies A
i
A
j
A
iþj
.
(ii) The superalgebra is ‘‘supercommutative’’ if, for
all homogeneous a, b in A, ab = (1)
(jajjbj)
ba.
If the algebra is supercommutative then odd
elements anticommute, and the square of an odd
element is zero. The basic supercommutative super-
algebra used is the real Grassmann algebra with
generators 1,
1
,
2
, ... and relations
1
i
¼
i
1 ¼
i
;
i
j
¼
j
i
½2
A typical element of this algebra is then
a ¼ a
;
1 þ
X
i
a
i
i
þ
X
i<j
a
ij
i
j
½3
This algebra, which is denoted R
S
, is a superalgebra
with R
S
:= R
S,0
R
S,1
, where R
S,0
consists of linear
combinations of products of even numbers of the
anticommuting generators, while R
S,1
is built simi-
larly from odd products.
The Grassmann algebra R
S
is used to build the
(m, n)-dimensional superspace R
m,n
S
in the following
way:
Definition 2. An (m, n)-dimensional superspace is
the space
R
m;n
S
¼ R
S0
R
S0
|fflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflffl}
m copies
R
S1
R
S1
|fflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflffl}
n copies
½4
A typical element of R
m, n
S
is written as
(x
1
, ..., x
m
;
1
, ...,
n
), where the convention is
used that lower case Latin letters represent even
objects and lower case Greek letters represent odd
objects, while small capitals are used for objects of
mixed or unspecified parity.
As will be described in more detail below, in the
geometric approach supermanifolds are spaces
locally modeled on R
m,n
S
. In order to define a
supermanifold, we will need to define a topology
on this space, and to have some notion of
differentiation. Consider first multilinear functions
of purely anticommuting variables. If there are n
such variables,
1
, ...,
n
, then a multilinear function
F can be expressed in the form
Fð
1
; ...;
n
Þ¼F
;
þ
X
n
i¼1
F
i
i
þ
X
n
1¼i<j
F
ij
i
j
þ
þ
F
1...n
1
...
n
½5
where the coefficients
F
;
, F
i
and so on are real
numbers. Such functions will be known (anticipating
the terminology for functions of both odd and even
variables) as supersmooth. (A useful notation will be
to write
Fð
1
; ...;
n
Þ¼
X
F
½6
with a multi-index =
1
k
and
=
1
k
1. The set of multi-indices is restricted to
those where 1
1
< <
k
n.) More general
supersmooth functions, with the coefficients
F
;
, ...
taking values in C, R
S
, or some other algebra are
also possible.
Differentiation of supersmooth functions of anti-
commuting variables is defined by linearity together
with the rule
@ð
1
2
...
r
Þ
@
j
¼
ð1Þ
k1
1
...
c
k
...
r
if j ¼
k
0 otherwise
½7
where the caret bindicates an omitted factor.
In order to extend the notion of supersmoothness
to functions on the more general superspace R
m,n
S
,
we should strictly take note of the fact that an even
Grassmann variable is not simply a real or complex
variable, as explained in the appendix. Assuming
this done, a supersmooth function on the general
superspace R
m, n
S
can then be defined as a function of
the form
Fðx
1
; ...; x
m
;
1
; ...;
n
Þ¼
X
F
ðx
1
; ...; x
m
Þ
½8
with each coefficient function
F
a smooth function
on R
m
.
The final preparatory idea needed is the topology
on the superspace R
m, n
S
. It turns out that a coarse,
non-Hausdorff topology leads to most of the super-
manifolds used in physics. In order to define this
topology, we introduce a mapping
: R
S
! R
defined by
a
;
1 þ
X
i
a
i
i
þ
X
i<j
a
ij
i
j
¼ a
;
½9
and the related mapping
: R
m;n
S
! R
m
defined by
Supermanifolds 131
(129)

ððx
1
; ...; x
m
;
1
; ...;
n
ÞÞ ¼ ððx
1
Þ; ...;ðx
m
ÞÞ ½10
These maps project out all the nilpotent Grass-
mann generators, leaving simply the real part. The
topology involves the inverse of these projection
maps: a subset U of R
m,n
S
is said to be open if and
only if there exists an open set V in R
m
such that
U =
1
(V). Thus, an open set is unlimited in the
nilpotent directions.
In the sequel, where we consider integration, the
superdeterminant of the matrix M of an endo-
morphism of a super vector space V will be useful.
If V is an (m, n)-dimensional super vector space
(so that V
0
has dimension m and V
1
dimension n),
then M will have the block diagonal form
M
00
M
01
M
10
M
11
where the entries of M
00
and M
11
are even, whereas
those of M
10
and M
10
are odd. If N = M
1
has block
form
N
00
N
01
N
10
N
11
then the superdeterminant of M is defined by
S det M ¼ det M
00
det N
11
It can be shown that the superdeterminant obeys the
product rule, unlike the obvious generalization of
the determinant to the super case.
The Geometric Approach to
Supermanifolds
A manifold is a space locally modeled on the
topological space R
m
, where m is the dimension of
the manifold. Thus, each point in a manifold has a
neighborhood which is essentially a neighborhood in
R
m
. The most geometrically intuitive approach to
supermanifolds is to generalize this directly by
modeling a space locally on an extension of R
m
to
include anticommuting variables; the most straight-
forward space with the required algebraic property
is the superspace R
m, n
S
built from a Grassmann
algebra, leading to a supermanifold of dimension
(m, n). (The dimension of a supermanifold is a pair
of integers, indicating the numbers of even and odd
coordinates of each point.)
The formal definition of a supermanifold will now
be given in a manner very closely analogous to that
of a classical manifold.
Definition 3. Let M be a set.
(i) An (m, n) open chart on M is a pair (U, ) such
that U is a subset of M and is an injective map
of U into R
m,n
S
, with the image (U) an open set
in R
m,n
S
.
(ii) An (m, n) atlas on M is a collection {(U
,
)} of
(m, n) charts on M such that the U
cover M
and, whenever U
\ U
is not empty, the change
of coordinate function
1
is supersmooth.
An (m, n)-dimensional supermanifold is a set M
together with a maximal (m, n) atlas on M.
The space M is given a topology by defining U M
to be open if and only if, for each such that U \ U
is not empty, the set
(U \ U
) is an open subset
of R
m,n
S
.
Examples of supermanifolds include R
m,n
S
itself, and
also supermanifolds constructed from the data of a
vector bundle over a classical manifold in a manner
which will now be described. If N is a classical
m-dimensional real manifold and E is an n-dimensional
vector bundle over N,thenan(m, n)-dimensional
supermanifold can be constructed in the following
way: suppose that {(V
,
)} is an atlas of charts on N,
so that each V
is an open subset of N and each
is
an injective map of V
onto an open subset of R
m
,
with
1
smooth. Suppose further that the V
are
also local trivialization neighborhoods of the bundle E
with transition functions g
: V
\ V
! GL(n).
Then we build the supermanifold M by patching
together the sets
1
(
(V
) R
0, n
S
) in a consistent
way. This leads to a supermanifold with coordinate
change functions
1
x
1
; ...x
m
;
1
; ...;
n
¼ x
1
; ...x
m
;
1
; ...;
n
where
x
1
; ...x
m
¼
1
x
1
; ...x
m
j
¼
X
n
k¼1
g
j
k
x
1
; ...; x
m
k
½11
(Here again we refer to the appendix for the way in
which functions of even Grassmann variables, as
opposed simply to real numbers, are handled.)
Particular examples of this construction are the
tangent bundle over N and bundles of spinors over
N. It was actually shown by Batchelor that all real,
supersmooth supermanifolds are of this form.
A similar definition may be made of a complex
supermanifold using a complex Grassmann algebra,
with the coordinate transition functions required to
be superanalytic. In this case, supermanifolds which
132 Supermanifolds
(130)

are not related to vector bundles in the manner
described above are possible, basically because
partitions of unity do not exist in the analytic
setting. An example is the twisted supertorus, which
is built over the standard torus and has transition
functions (z, ) ! (z þ 1, )and(z, ) ! (z þ a þ
, þ ), extending the standard torus with transi-
tion functions z ! z þ 1, z ! z þ a. (Here a, are,
respectively, even and odd constants.) This super-
manifold is an example of a super Riemann surface;
such surfaces play an important role in the quanti-
zation of the spinning string.
As with classical manifolds, a natural class of
functions can be defined on a supermanifold:
a function f on an open subset U of the super-
manifold M is said to be supersmooth if, for each
such that U \ U
is nonempty, the function f
1
is
supersmooth on
(U \ U
). In local coordinates
supersmooth functions are such that
f (x
1
, ..., x
m
,
1
, ...,
n
) =
P
f
(x
1
, ..., x
m
)
with
each f
a smooth function.
The Algebraic Approach to
Supermanifolds
In the algebraic approach to supermanifolds, it is the
algebra of functions, rather than the manifold
itself, which is extended to include anticommuting
elements. In this approach an (m, n)-dimensional
supermanifold is defined to be a pair (N, A), where
N is an m-dimensional classical manifold and A is a
sheaf of superalgebras over N with various proper-
ties, described below. The statement that A is a
sheaf of algebras over N means that corresponding
to each open subset U of N there is an algebra A(U);
also, if V U, there is a ‘‘restriction map’’
U, V
mapping A(U) into A(V), and the various restriction
maps obey certain consistency conditions. A parti-
cular example of such a sheaf (with trivial odd part)
is the sheaf A
;
of real-valued functions on N, with
A
;
(U) = C
1
(U), the set of real-valued smooth func-
tions on U and
U, V
mapping a function in C
1
(U)
to its restriction in C
1
(V). The defining property of
the sheaf corresponding to an (m, n)-dimensional
supermanifold is that there is a cover {U
}ofN for
which the algebras A(U
) have the form A(U
) ffi
C
1
(U
) (R
n
), so that a typical element f of
A(U
) may be expressed as f =
P
f
, where f
2
C
1
(U
)and
1
, ...,
n
are generators of (R
n
). The
notation here is chosen to emphasize the close
correspondence with the algebra of smooth func-
tions described at the end of the previous section.
This makes it clear that, despite an apparent
difference, the two approaches lead to essentially
equivalent supermanifolds.
The advantage of the algebraic approach is its
mathematical elegance and economy – there is no
need to introduce the auxiliary Grassmann algebra
R
S
in which coordinate functions take values – but
from the point of view of physicists, the geometric
point of view has two advantages: first, it is closer to
the standard manifold picture and thus easier to
grasp, and, second, it allows a wider class of
supermanifolds, because Grassmann constants are
allowed; for instance, the twisted supertorus
described above cannot be included in the algebraic
approach without either introducing an auxiliary
algebra or moving to the more difficult concept of a
family of supermanifolds.
While there have been various attempts to develop
infinite-dimensional supermanifolds, most of the
constructions have been developed for very specific
purposes, such as path integration and functional
integration methods for theories with fermions.
Even the question of defining a basic infinite-
dimensional superalgebra with the necessary
analytic properties, such as a Hilbert–Banach super-
algebra, requires sophisticated procedures, so that
the development of a theory of infinite-dimensional
supermanifolds becomes extremely technical.
Calculus on Supermanifolds
Much of the calculus of functions on supermanifolds
proceeds in simple analogy to that of classical
manifolds, with addition sign factors occurring when-
ever two odd quantities are transposed. For instance, a
vector field on M may be described as a super-
derivation of the algebra of supersmooth functions
on M, that is, a linear mapping of this space obeying
the super Leibnitz rule Xfg= Xf g þ (1)
(jXjjf j)
fXg.
Standard examples of vector fields (defined locally) are
coordinate derivatives @=@x
i
and @=@
j
, defined by
(@=@x
i
)f = @
i
(f )and(@=@
j
)f = @
jþm
(f )with
the coordinate function corresponding to the coordi-
nates (x
1
, ..., x
m
;
1
, ...,
n
). Equipped with this con-
cept of vector field, much of differential calculus on
manifolds can be directly generalized to supermani-
folds in a relatively straightforward way. However, in
the case of integration the situation is quite different.
The standard approach to integration of anticommut-
ing variables is the Berezin integral, which is a formal,
algebraic integral that is not an antiderivative and has
no measure-theoretic features. There are various
reasons why such an integral is used: for instance,
even the simple function of a single anticommuting
variable has no antiderivative, while the topology on
R
m,n
S
does not allow open sets which discriminate in
Supermanifolds 133
(131)
odd directions. Additionally, when changing variables
on R
m,n
S
it is the superdeterminant of the Jacobian
matrix which must be used. In the purely odd sector,
differentials thus transform the ‘‘wrong’’ way.
The Berezin integral of a function f of n anti-
commuting variables is defined by
Z
d
n
X
f
!
¼ f
1...n
½12
In other words, Berezin integration simply picks out
the coefficient of the highest-order term, thus
resembling differentiation more than integration in
the classical sense. Nonetheless, the Berezin integral
has very useful properties, in particular allowing
direct analoges of Fourier transformations and
integral kernel. Given that it is the algebra of
functions, and the operators acting on these alge-
bras, which is the key element in supergeometry,
these are vital properties of the integral.
The transformation rule under change of variable
is the inverse of that which one expects. For
instance, in the case of a single variable, if one
makes the transformation ! = a þ with a and
constants, a direct calculation shows that the
integral is invariant provided that one sets d = a d.
Integration on R
m,n
S
is essentially defined by
combining classical integration for the even variables
with Berezin integration for odd variables, giving
Z
1
ðVÞ
d
m
x d
n
X
f
ðx
1
; ...; x
m
Þ
!
¼
Z
V
d
m
xf
1...n
ðx
1
; ...; x
m
Þ
½13
This also defines integration on supermanifolds,
provided that we can find a rule for the change of
variable. This, as indicated above, may be done by
using the superdeterminant of the Jacobian matrix.
Suppose that (y, ) are a new set of coordinates on
our supermanifold. Then an invariant definition of
integral is obtained if we set
d
m
y d
n
¼ Sdet
@y
@x
@y
@
@
@x
@
@
0
B
B
@
1
C
C
A
d
m
x d
n
½14
Appendix
We now describe the device which allows functions
of even Grassmann variables to be handled simply as
functions of conventional variables. The necessary
class of functions is captured by defining super-
smooth functions on R
m,0
S
as extensions by Taylor
expansion from smooth functions on R
m
.
Definition 4. The function F : R
m,0
S
! R
S
is said to
be supersmooth if there exists a smooth function
~
F : R
m
! R, such that
Fðx
1
; ...; x
m
Þ
¼
~
Fððx ÞÞ þ
X
m
i¼1
ðx
i
ðx
i
Þ1Þ
@
~
F
@x
i
ððxÞÞ
þ
1
2
X
m
i;j¼1
ðx
i
ðx
i
Þ1Þ
ðx
j
ðx
j
Þ1Þ
@
2
~
F
@x
i
@x
j
ððxÞÞ... ½15
(Although this Taylor series will in general be
infinite, it gives well-defined coefficients for each
in the expansion [3], so that the value of F is a
well-defined element of R
S
.) A number of different
classes of function can be obtained, by varying the
space in which the function
~
F takes its value.
See also: Batalin–Vilkovisky Quantization; BRST
Quantization; Graded Poisson Algebras; Path-Integrals in
Non Commutative Geometry; Random Matrix Theory in
Physics; Supergravity; Superstring Theories;
Supersymmetric Particle Models; Supersymmetric
Quantum Mechanics.
Further Reading
Batchelor M (1979) The structure of supermanifolds. Trans-
actions of the American Mathematical Society 253: 329–338.
Batchelor M (1980) Two approaches to supermanifolds. Trans-
actions of the American Mathematical Society 258: 257–270.
Berezin FA (1987) Introduction to Superanalysis. Dordrecht: Reidel.
Berezin FA and Lei
ˇ
tes DA (1976) Supermanifolds. Soviet Maths
Doklady 16: 1218–1222.
Crane L and Rabin JM (1988) Super Riemann surfaces:
uniformization and Teichmu¨ ller theory. Communications in
Mathematical Physics 113: 601–623.
DeWitt BS (1992) Supermanifolds. Cambridge: Cambridge
University Press.
Howe PS (1979) Super Weyl transformations in two dimensions.
Journal of Physics A 12: 393–402.
Jadczyk A and Pilch K (1981) Superspace and supersymmetries.
Communications in Mathematical Physics 78: 373–390.
Kostant B (1977) Graded manifolds, graded Lie theory
and prequantization. In: Differential Geometric Methods in
Mathematical Physics,. Lecture Notes in Mathematics, Springer.
Kupsch J and Smolyanov O (2000) Hilbert norms for graded
algebras. Proceedings of the American Mathematical Society
128: 1647–1653.
Polchinski J (1998) String Theory, vol. II. Cambridge: Cambridge
University Press.
Rogers A (2003) Supersymmetry and Brownian motion on
supermanifolds. Infinite Dimensional Analysis, Quantum
Probability and Related Topics 6(suppl. 1): 83–102.
Salam A and Strathdee J (1974) Super-gauge transformations.
Nuclear Physics B 76: 477–482.
134 Supermanifolds
(132)

Superstring Theories
C Bachas and J Troost, Ecole Normale Supe
´
rieure,
Paris, France
ª 2006 Elsevier Ltd. All rights reserved.
Introduction
String theory postulates that all elementary particles
in nature correspond to different vibration states of
an underlying relativistic string. In the quantum
theory both the frequencies and the amplitudes of
vibration are quantized, so that the quantum states
of a string are discrete. They can be characterized by
their mass, spin, and various gauge charges. One of
these states has zero mass and spin equal to 2h, and
can be identified with the messenger of gravitational
interactions, the graviton. Thus, string theory is a
candidate for a unified theory of all fundamental
interactions, including quantum gravity.
In this article, we discuss the theory of superstrings
as consistent theories of quantum gravity. The aim is
to provide a quick (mostly lexicographic and biblio-
graphic) entry to some of the salient features of the
subject for a nonspecialist audience. Our treatment is
thus neither complete nor comprehensive – there exist
for this several excellent expert books, in particular
by Green, et al. (1987) and by Polchinski (1998).An
introductory textbook by Zwiebach (2004) is also
highly recommended for beginners. Several other
complementary reviews on various aspects of super-
string theories are available on the internet (see the
‘‘Furtherreading’’section);somemorewillbegiven
as we proceed.
The Five Superstring Theories
Theories of relativistic extended objects are tightly
constrained by anomalies, that is, quantum viola-
tions of classical symmetries. These arise because the
classical trajectory of an extended p-dimensional
object (or ‘‘p-brane’’) is described by the embedding
X
(
a
), where
a = 0,..., p
parametrize the brane world
volume, and X
= 0,..., D1
are coordinates of the
target space. The quantum mechanics of a single
p-brane is therefore a (p þ 1)-dimensional quantum
field theory, and as such suffers a priori from
ultraviolet divergences and anomalies. The case
p = 1 is special in that these problems can be exactly
handled. The story for higher values of p is much
more complicated, as will become apparent later on.
The theory of ordinary loops in space is called
closed bosonic string theory. The classical trajectory
Superstring Theories 133
Voronov AA (1992) Geometric integration theory on super-
manifolds. Soviet Scientific Reviews C: Mathematical Physics
Reviews 9: 1–138.
Wess J and Bagger J (1983) Supersymmetry and Supergravity.
Princeton: Princeton University Press.
West P (1990) Introduction to Supersymmetry and Supergravity.
Singapore: World Scientific.
of a bosonic string extremizes the Nambu–Goto
action (proportional to the invariant area of the
world sheet)
S
NG
¼
1
2
0
Z
d
2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
detðG
@
a
X
@
b
X
Þ
q
½1
where G
(X) is the target-space metric, and
0
is
the Regge slope (which is inversely proportional to
the string tension and has dimensions of length
squared). In flat spacetime, and for a conformal
choice of world-sheet parameters
=
0
1
, the
equations of motion read:
@
þ
@
X
¼ 0and
@
X
@
X
¼ 0 ½2
with
the Minkowski metric. The X
are thus free
two-dimensional fields, subject to quadratic phase-
space constraints known as the Virasoro conditions.
These can be solved consistently at the quantum
level in the critical dimension D = 26. Otherwise,
the symmetries of eqns [2] are anomalous: either
Lorentz invariance is broken, or there is a conformal
anomaly leading to unitarity problems. (For D < 26,
unitary noncritical string theories in highly curved
rather than in the originally flat background can be
constructed.)
Even for D = 26, bosonic string theory is, how-
ever, sick because its lowest-lying state is a tachyon,
that is, it has negative mass squared. This follows
from the zeroth-order Virasoro constraints,
m
2
¼p
M
p
M
¼
4
0
ðN
L
1Þ¼
4
0
ðN
R
1Þ½3
where N
L
(N
R
) is the sum of the frequencies of all
left(right)-moving excitations on the string world
sheet. The negative contribution to m
2
comes from
quantum fluctuations, and is analogous to the well-
known Casimir energy. The tachyon has
N
L
= N
R
= 0. Its presence signals an instability of
Minkowski spacetime, which in bosonic string
theory is expected to decay, possibly to some
lower-dimensional highly curved geometry. The
details of how this happens are not, at present,
well understood.
The problem of the tachyon is circumvented by
endowing the string with additional, anticommuting
coordinates, and requiring spacetime supersymmetry.
This is a symmetry that relates string states with
integer spin, obeying Bose–Einstein statistics, to
states with half-integer spin obeying Fermi–Dirac
statistics. There exist two standard descriptions of the
superstring: the Ramond–Neveu–Schwarz (RNS)
formulation, where the anticommuting coordinates
carry a spacetime vector index, and the Green–
Schwarz (GS) formulation in which they transform as
a spacetime spinor
. Each has its advantages and
drawbacks: the RNS formulation is simpler from the
world sheet point of view, but awkward for describ-
ing spacetime fermionic states; in the GS formulation,
on the other hand, spacetime supersymmetry is
manifest but quantization can only be carried out in
the restrictive light-cone gauge. A third formulation,
possibly combining the advantages of the other two,
has been proposed more recently by Berkovits (2002) –
it is still being developed.
Anomaly cancelation leads to five consistent super-
string theories, all defined in D = 10 flat spacetime
dimensions. They are referred to as type IIA, type IIB,
heterotic SO(32), heterotic E
8
E
8
, and type I. The
two type II theories are given (in the RNS formula-
tion) by a straightforward extension of eqns [2]:
@
þ
@
X
¼@
¼0 and
@
X
¼0 ½4
The left- and right-moving world sheet fermions can
be separately periodic or antiperiodic – these are
known as Ramond (R) and Neveu–Schwarz (NS)
boundary conditions. Ramond fermions have zero
modes obeying a Dirac -matrix algebra, and which
must thus be represented on spinor space. As a
result, out of the four possible boundary conditions
for
þ
and
, namely NS–NS, R–R, NS–R, or
R–NS, the first two give rise to string states that are
spacetime bosons, while the other two give rise to
states that are spacetime fermions. Consistency of
the theory further requires that one only keep states
of definite world-sheet fermion parities – an opera-
tion known as the Gliozzi–Scherk–Olive (GSO)
projection. This operation removes the would-be
tachyon, and acts as a chirality projection on the
spinors. The type IIA and IIB theories differ only in
that the spinors coming from the left and right
Ramond sectors have the opposite chirality in type
IIA and the same chirality in type IIB.
The fact that string excitations split naturally into
noninteracting left and right movers is crucial for
the construction of the heterotic strings. The key
idea is to put together the left-moving sector of the
D = 10 type II superstring and the right-moving
sector of the D = 26 bosonic string. A subtlety arises
because the left–right asymmetry may lead to extra
anomalies, under global reparametrizations of the
string world sheet. These are known as modular
anomalies, and we will come back to them in the
following section. Their cancelation imposes strin-
gent constraints on the zero modes of the unmatched
(chiral) bosons in the right-moving sector. The free-
field expansion of these bosons can be written as:
Xð
Þ¼x
R
þ
0
p
R
þ
ffiffiffiffiffi
0
2
r
X
n6¼0
i
n
a
n
e
2in
½5
134 Superstring Theories

where bold-face letters denote 16-component vec-
tors. Modular invariance then requires that the
generalized momentum p
R
take its values in a
sixteen-dimensional, even self-dual lattice. There
exist two such lattices, and they are generated by
the roots of the Lie groups Spin(32)=Z
2
and E
8
E
8
.
They give rise to the two consistent heterotic string
theories.
In contrast to the type II and heterotic theories,
which are based on oriented closed strings, the type I
theory has unoriented closed strings as well as open
strings in its perturbative spectrum. The closed
strings are the same as in type IIB, except that one
only keeps those states that are invariant under
orientation reversal (
þ
$
). Open strings must
also be invariant under this flip, and can further-
more carry pointlike (Chan–Paton) charges at their
two endpoints. This is analogous to the flavor
carried by quarks at the endpoints of the chromo-
electric flux tubes in QCD. Ultraviolet finiteness
requires that the Chan–Paton charges span a
32-dimensional vector space, so that open strings
transform in bifundamental symmetric or antisym-
metric representations of SO(32). For a thorough
review of type I string theory, see the reference
Angelantonj and Sagnotti (2002, 2003).
Interactions and Effective Theories
Strings interact by splitting or by joining at a point,
as is illustrated in Figure 1. This is a local
interaction that respects the causality of the theory.
To compute scattering amplitudes, one sums over all
world sheets with a given set of asymptotic states,
and weighs each local interaction with a factor of
the string coupling constant . The expansion in
powers of is analogous to the Feynman-diagram
expansion of point-particle field theories. These
latter are usually defined by a Lagrangian, or more
exactly by a functional-integral measure, and they
make sense both for off-shell quantities as well as at
the nonperturbative level. In contrast, our current
formulation of superstring theory is in terms of a
perturbatively defined S-matrix. The advent of
dualities has offered glimpses of an underlying
nonperturbative structure called M-theory, but
defining it precisely is one of the major outstanding
problems in the subject. (One approach consists in
trying to define a second-quantized string field
theory; see String Field Theory).
Another important expansion of string theory,
very useful when it comes to extracting spacetime
properties, is in terms of the characteristic string
length l
s
=
ffiffiffiffiffi
0
p
. At energy scales El
s
1, only a
handful of massless string states propagate, and their
interactions are governed by an effective low-energy
Lagrangian. In the type II theories, the massless
bosonic states (or rather their corresponding fields)
consist of the metric G
, a scalar field called the
dilaton, and a collection of antisymmetric n-form
fields coming from both the NS–NS and the R–R
sectors. For type IIA, these latter are an NS–NS
2-form B
2
, an R–R 1-form C
1
, and an R–R 3-form
C
3
. The leading-order action for these fields reads:
S
IIA
¼
1
2
2
Z
d
10
x
ffiffiffiffiffiffiffiffi
G
p
e
2
ðR þ4@
@
1
2
jH
3
j
2
Þ
ffiffiffiffiffiffiffiffi
G
p
ð
1
2
jF
2
j
2
þ
1
2
jF
4
C
1
^H
3
j
2
Þ
1
2
B
2
^F
4
^F
4
½6
where F
2
=dC
1
, H
3
=dB
2
, and F
4
=dC
3
are field
strengths, the wedge denotes the exterior product of
forms, and jF
n
j
2
=(1=n!)F
1
n
F
1
n
. The dimen-
sionful coupling can be expressed in terms of the
string-theory parameters, 2
2
=(2)
7
2
0
4
. A similar
expression can be written for the IIB theory, whose
R–R sector contains a 0-form, a 2-form, and a
4-form potential, the latter with self-dual field
strength.
The action [6], together with its fermionic part,
defines the maximally supersymmetric nonchiral
extension of Einstein’s gravity in ten dimensions
called type IIA supergravity (see Supergravity and
Salam and Sezgin (1989)). The dilaton and all
antisymmetric tensor fields belong to the super-
multiplet of the graviton – they provide together the
same number of (bosonic) states as a ten-dimensional
nonchiral gravitino. Supersymmetry fixes further-
more completely all two-derivative terms of the
action, so that the theory defined by [6] is (almost)
unique. (There exists in fact a massive extension of
IIA supergravity, which is the low-energy limit of
string theory with a nonvanishing R–R 10-form field
strength.) It is, therefore, not surprising that it should
emerge as the low-energy limit of the (nonchiral)
superstring theory. The latter provides, however, an
ultraviolet completion of an otherwise nonrenorma-
lizable theory, a completion which is, at least
perturbatively, finite and consistent.
Figure 1 A four-particle and a four-string interaction.
Superstring Theories 135
The finiteness of string perturbation theory has
been, strictly speaking, only established up to two
loops – for a recent review see D’Hoker and Phong
(2002). However, even though the technical pro-
blem is open and hard, the qualitative case for all-
order finiteness is convincing. It can be illustrated
with the torus diagram which makes a one-loop
contribution to string amplitudes. The thin torus of
Figure 2 could be traced either by a short, light
string propagating (virtually) for a long time, or by a
long, heavy string propagating for a short period of
time. In conventional field theory, these two virtual
trajectories would have made distinct contributions
to the amplitude, one in the infrared and the second
in the ultraviolet region. In string theory, on the
other hand, they are related by a modular transfor-
mation (that exchanges
0
with
1
) and must not,
therefore, be counted twice. A similar kind of
argument shows that all potential divergences of
string theory are infrared – they are therefore
kinematical (i.e., occur for special values of the
external momenta), or else they signal an instability
of the vacuum and should cancel if one expands
around a stable ground state.
The low-energy limit of the heterotic and type I
string theories is N = 1 supergravity plus super
Yang–Mills. In addition to the N = 1 graviton
multiplet, the massless spectrum now also includes
gauge bosons and their associated gauginos. The
two-derivative effective action in the heterotic case
reads:
S
het
¼
1
2
2
Z
d
10
x
ffiffiffiffiffiffiffiffi
G
p
e
2
"
R þ 4@
@
þ
2
g
2
YM
trðF
F
Þ
1
2
dB
2
2
g
2
YM
!
gauge
3
2
#
þ fermions ½7
where !
gauge
3
= tr(AdA þ (2=3)A
3
) is the Chern–
Simons gauge 3-form. Again, supersymmetry fixes
completely the above action – the only freedom is in
the choice of the gauge group and of the Yang–Mills
coupling g
YM
. Thus, up to redefinitions of the fields,
the type I theory has necessarily the same low-
energy limit.
The D = 10 supergravity plus super Yang–Mills
has a hexagon diagram that gives rise to gauge and
gravitational anomalies, similar to the triangle
anomaly in D = 4. It turns out that for the two
special groups E
8
E
8
and SO(32), the structure of
these anomalies is such that they can be canceled by
a combination of local counter-terms. One of them
is of the form
R
B
2
^ X
8
(F, R), where X
8
is an 8-form
quartic in the curvature and/or Yang–Mills field
strength. The other is already present in the lower
line of expression [7], with the replacement
!
gauge
3
!!
gauge
3
!
Lorentz
3
, where the second Chern–
Simons form is built out of the spin connection.
Note that these modifications of the effective action
involve terms with more than two derivatives, and
are not required by supersymmetry at the classical
level. The discovery by Green and Schwarz that
string theory produces precisely these terms (from
integrating out the massive string modes) was called
the ‘‘first superstring revolution.’’
D-Branes
A large window into the nonperturbative structure
of string theory has been opened by the discovery of
D(irichlet)-branes, and of strong/weak-coupling
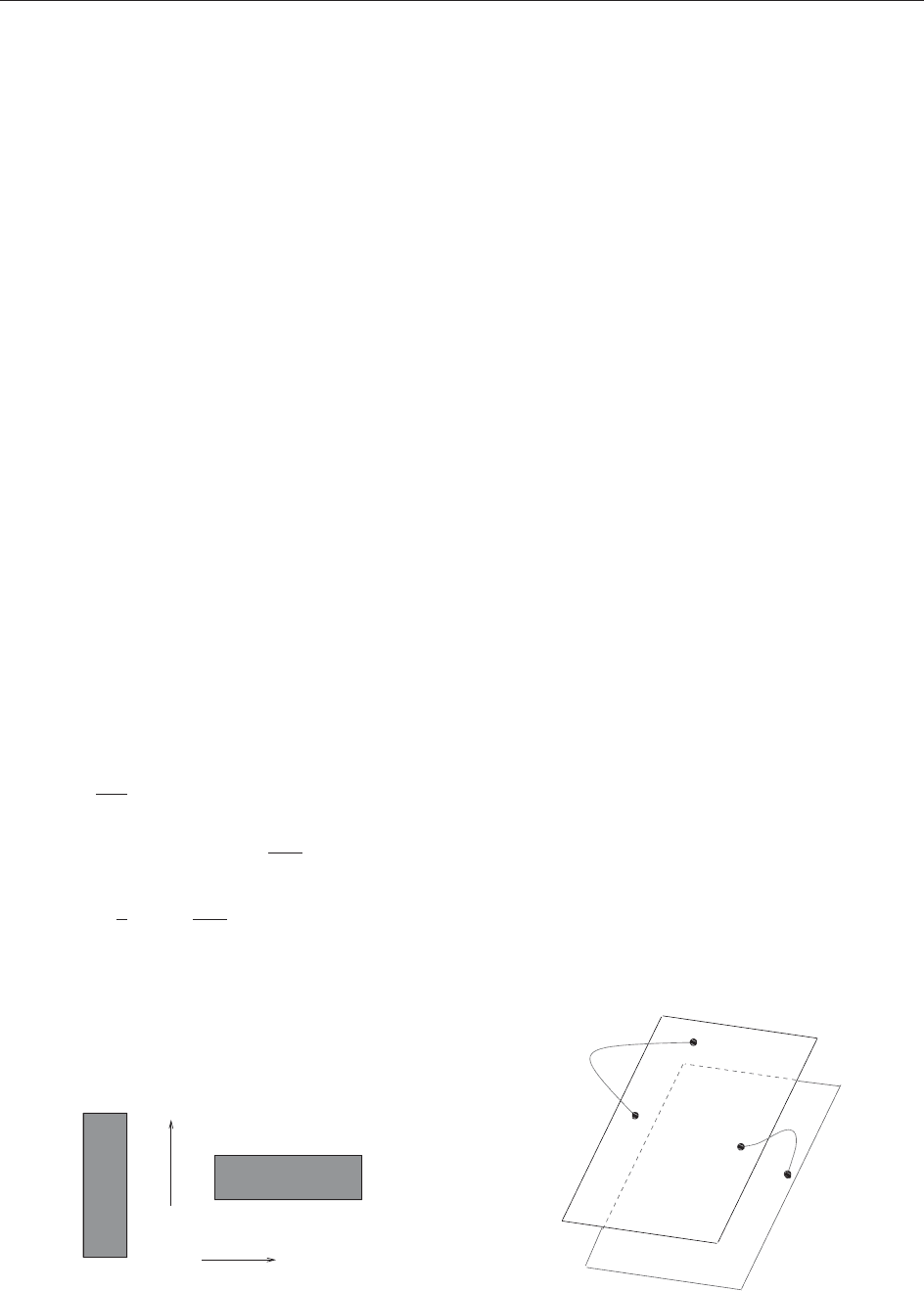
duality symmetries. A Dp brane is a solitonic
p-dimensional excitation, defined indirectly by the
property that open string endpoints can attach to its
world volume (see Figure 3). Stable Dp branes exist
in the type IIA and type IIB theories for p even,
respectively, odd, and in the type I theory for p = 1
and 5. They are charged under the R–R (p þ 1)-form
potential or, for p > 4, under its magnetic dual.
Strictly speaking, only for 0 p 6 do D-branes
resemble regular solitons the word stands for
‘‘solitary waves’’). The D7 branes are more like
Time
Space
Figure 2 The same torus diagram viewed in two different
channels.
Figure 3 D-branes and open strings.
136 Superstring Theories
cosmic strings, the D8 branes are domain walls,
while the D9 branes are spacetime filling. Indeed,
type I string theory can be thought as arising from
type IIB through the introduction of an orientifold
9-plane (required for tadpole cancelation) and of 32
D9 branes.
The low-energy dynamics of a Dp brane is
described by a supersymmetric abelian gauge theory,
reduced from ten down to p þ 1 dimensions. The
gauge field multiplet includes 9 p real scalars,
plus gauginos in the spinor representation of the
R-symmetry group SO(9 p). These are precisely
the massless states of an open string with endpoints
moving freely on a hyperplane. The real scalar fields
are Goldstone modes of the broken translation
invariance, that is, they are the transverse coordinate
fields
~
Y(
a
) of the D-brane. The bosonic part of the
low-energy effective action is the sum of a Dirac–
Born–Infeld (DBI) and a Chern–Simons (CS) like
term:
I
p
¼T
p
Z
d
pþ1
e
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
detð
^
G
ab
þF
ab
Þ
q
p
Z
X
n
^
C
n
^ e
F
½8
where F
ab
=
^
B
ab
þ 2
0
F
ab
, hats denote pullbacks
on the brane of bulk tensor fields (e.g.,
^
G
ab
=
G
@
a
Y
@
b
Y
), F
ab
is the field strength of the
world-volume gauge field, and in the CS term
one is instructed to keep the (p þ 1)-form of the
expression under the integration sign. The constants
T
p
and
p
are the tension and charge density of the
D-brane. As was the case for the effective super-
gravities, the above action receives curvature
corrections that are higher order in the
0
expan-
sion. Note however that a class of higher-order
terms have been already resummed in expression
[8]. These involve arbitrary powers of F
ab
, and are
closely related more precisely T-dual, see later) to
relativistic effects which can be important even in
the weak-acceleration limit. When refereing to the
D9 branes of the type I superstring, the action [8]
includes the GS terms required to cancel the gauge
anomaly.
The tension and charge density of a Dp brane can
be extracted from its coupling to the (closed-string)
graviton and R–R (p þ 1)-form, with the result:
T
2
p
¼
2
p
¼
2
ð4
2
0
Þ
3p
½9
The equality of tension and charge follows from
unbroken supersymmetry, and is also known as a
Bogomol’nyi–Prasad–Sommerfeld (BPS) condition.
It implies that two or more identical D-branes
exert no net static force on each other, because
their R–R repulsion cancels exactly their gravita-
tional attraction. A nontrivial check of the result
[9] comes from the Dirac quantization condition
(generalized to extended objects by Nepomechie
and Teitelboim). Indeed, a Dp brane and a
D(6 p)-brane are dual excitations, like electric
and magnetic charges in four dimensions, so their
couplings must obey
2
2
p
6p
¼ 2k where k 2 Z ½10
This ensures that the Dirac singularity of the long-
range R–R fields of the branes does not lead to an
observable Bohm–Aharonov phase. The couplings
[9] obey this condition with k = 1, so that D-branes
carry the smallest allowed R–R charges in the
theory.
A simple but important observation is that open
strings living on a collection of n identical D-branes
have matrix-valued wave functions
ij
, where
i, j = 1, ..., n label the possible endpoints of the
string. The low-energy dynamics of the branes is
thus described by a nonabelian gauge theory, with
group U(n) if the open strings are oriented, and
SO(n) or Sp(n) if they are not. We have already
encountered such Chan–Paton factors in our discus-
sion of the type I superstring. More generally, this
simple property of D-branes has led to many insights
on the geometric interpretation and engineering of
gauge theories, which are reviewed in the articles
Brane Construction of Gauge Theories and Gauge
Theories from Strings. It has also placed on a firmer
footing the idea of a brane world, according to
which the fields and interactions of the standard
model would be confined to a set of D-branes, while
gravitons are free to propagate in the bulk (for
reviews, see Brane Worlds and reference Lust
(2004)). It has, finally, inspired the gauge/string
theory or AdS/CFT correspondence (see Ads/CFT
Correspondence and Aharony et al. (2000))on
which we will comment later.
Dualities and M Theory
One other key role of D-branes has been to provide
evidence for the various nonperturbative duality
conjectures. Dual descriptions of the same physics
arise also in conventional field theory. A prime
example is the Montonen–Olive duality of four-
dimensional, N = 4 supersymmetric Yang–Mills,
which is the low-energy theory describing the
dynamics of a collection of D3 branes. The action
Superstring Theories 137