Francoise J.-P., Naber G.L., Tsun T.S. (editors) Encyclopedia of Mathematical Physics
Подождите немного. Документ загружается.

A more complicated Poisson structure for this
system is
P ¼
A 3@
4
x
þ 3u
2
@
2
x
þ 9u
1
@
x
þ 3u
1
x
B 6@
3
x
þ 6u
2
@
x
þ 3u
2
x
!
½18
with
A ¼ 2@
5
x
4u
2
@
3
x
6u
2
x
@
2
x
þð2ðu
2
Þ
2
þ 6u
1
x
6u
2
xx
Þ@
x
þð3u
1
xx
2u
2
xxx
þ 2u
2
u
2
x
Þ
and
B ¼ 3@
4
x
3u
2
@
2
x
þð9u
1
6u
2
x
Þ@
x
þð6u
1
x
3u
2
xx
Þ
It can be obtained by means of the Drinfeld–
Sokolov reduction (or also by means of a
bi-Hamiltonian reduction) from the Lie–Poisson
structure (modified with the cocycle @
x
) on the
space of C
1
maps from S
1
to the Lie algebra of
3 3 traceless matrices. This is the reason why it is
a Poisson structure, compatible with [7]. The system
[6] can be written as
u
1
t
u
2
t
0
@
1
A
¼ P
h
2
/u
1
h
2
/u
2
!
where h
2
= (1=3)u
1
is the density of a Casimir of the
Poisson structure [7]. Thus, the Boussinesq equation
is a bi-Hamiltonian system and can be shown to
possess, like KdV, an infinite sequence of conserved
quantities and symmetries, forming the Boussinesq
hierarchy. The KdV and the Boussinesq hierarchy are
indeed particular examples of Gelfand–Dickey hier-
archies (Dickey 2003). They are hierarchies of
systems of n equations with n unknown functions
and they are related, via the Drinfeld–Sokolov
approach, to the Lie algebra sl(n þ 1). As shown by
Adler, Dickey, and Gelfand, these hierarchies have a
bi-Hamiltonian formulation. Also the generalized
KdV equations, associated by Drinfeld and Sokolov
with an arbitrary affine Kac–Moody Lie algebra, are
bi-Hamiltonian (or are obtained as suitable reduc-
tions of bi-Hamiltonian systems). Let us consider
now the (dispersionless) Camassa–Holm equation
u
t
u
txx
¼3uu
x
þ 2u
x
u
xx
þ uu
xxx
½19
which also describes shallow water waves, and
possesses remarkable solutions called peakons, since
they represent traveling waves with discontinuous
first derivative. In order to supply this equation with a
(bi-)Hamiltonian structure, one has to perform the
change of variable m = u u
xx
, whose inverse, in the
space of period-1 functions, turns out to be given by
uðxÞ¼
Z
x
0
mðyÞ sinhðy xÞdy
þ
1
2 sinhð1=2Þ
Z
1
0
mðyÞcosh y x
1
2
dy
The Camassa–Holm equation is then bi-Hamiltonian
with respect to the Poisson pair
P
1
¼ @
xxx
@
x
; P
2
¼ 2m@
x
þ m
x
Indeed, it can be written as m
t
= P
1
dH
2
= P
1
dH
2
,
where
H
1
¼
1
2
Z
ðu
2
þ u
2
x
Þdx
H
2
¼
1
2
Z
ðu
3
þ uu
2
x
Þdx
Notice that the Poisson pair of the Camassa–Holm
equation can be obtained from that of KdV by
moving the cocycle @
xxx
from the second Poisson
structure to the first one. Indeed,
P
ða;b;cÞ
¼ a@
xxx
þ b@
x
þ cð2m@
x
þ m
x
Þ
a; b; c 2 R ½20
is a family of pairwise compatible Poisson operators.
Moreover, we mention that Misiołek has shown that
also the Camassa–Holm equation is an Euler equation
on the dual of the Virasoro algebra. We conclude this
article with a brief discussion concerning the so-called
bi-Hamiltonian structures of hydrodynamic type. They
play a relevant role in the theory of Frobenius
manifolds, that, in turn, have deep relations with
many important topics in contemporary mathematics
and physics, such as Gromov–Witten invariants and
isomonodromic deformations. As we have seen in the
earlier section, a Poisson structure of hydrodynamic
type is given, on the space of C
1
maps from S
1
to (an
open set of) R
n
,by
fu
i; x
; u
j; y
g¼g
ij
ðuÞ
0
ðx yÞþ
ij
k
ðuÞu
k
x
ð x yÞ½21
where g
ij
(u) are the contravariant components of
a (pseudo-)Riemannianflatmetricandthe
ij
k
are
the (contravariant) Christoffel symbols of the
metric. If two Poisson structures of hydrodynamic
type are given, it can be shown that they are
compatible if and only if the two corresponding
metrics form a flat pencil. This means that their
linear combinations (with constant coefficients)
are still flat (pseudo-)Riemannian metrics, and
that the contravariant Christoffel symbols of the
linear combinations are the linear combinations
of the contravariant Christoffel symbols of the
Bi-Hamiltonian Methods in Soliton Theory 295

two metrics. The simplest example is given by the
bi-Hamiltonian formulation of the Burgers (or
dispersionless KdV) equation,
u
t
þ 3uu
x
¼ 0
that we have already encountered. We know that
this equation is Hamiltonian with respect to the
(Lie–)Poisson operator 2u@
x
þ u
x
, with Hamiltonian
function H
1
= (1=2)
R
u
2
dx, and with respect to
the Poisson operator @
x
, with Hamiltonian function
H
2
= (1=2)
R
u
3
dx. This also means that the bi-
Hamiltonian structure of the Burgers equation
comes from the family [20]. The first Hamiltonian
structure corresponds to the standard metric on R,
that is, du du, whereas the second one is given by
the metric (2u)
1
du du.
See also: Classical r-Matrices, Lie Bialgebras, and
Poisson Lie Groups; Hamiltonian Fluid Dynamics;
Infinite-Dimensional Hamiltonian Systems; Integrable
Systems and Recursion Operators on Symplectic and
Jacobi Manifolds; Integrable Systems: Overview;
Korteweg–de Vries Equation and Other Modulation
Equations; Multi-Hamiltonian Systems; Recursion
Operators in Classical Mechanics; Solitons and
Kac–Moody Lie Algebras; Toda Lattices; WDVV
Equations and Frobenius Manifolds.
Further Reading
Arnol’d VI and Khesin BA (1998) Topological Methods in
Hydrodynamics. New York: Springer.
Błaszak M (1998) Multi-Hamiltonian Theory of Dynamical
Systems. Berlin: Springer.
Dickey LA (2003) Soliton Equations and Hamiltonian Systems,
2nd edn. River Edge: World Scientific.
Dorfman I (1993) Dirac Structures and Integrability of Nonlinear
Evolution Equations. Chichester: Wiley.
Drinfeld VG and Sokolov VV (1985) Lie algebras and equations
of Korteweg–de Vries type. Journal of Soviet Mathematics
30: 1975–2036.
Dubrovin BA (1996) Geometry of 2D topological field theories.
In: Donagi R et al. (ed.) Integrable Systems and Quantum
Groups (Montecatini Terme, 1993), Lecture Notes in Mathe-
matics, vol. 1620, pp. 120–348. Berlin: Springer.
Dubrovin BA, Krichever IM, and Novikov SP (2001) Integrable
systems. I. In: Arnol’d VI (ed.) Encyclopaedia of Mathematical
Sciences. Dynamical Systems IV, pp. 177–332. Berlin: Springer.
Faddeev LD and Takhtajan LA (1987) Hamiltonian Methods in
the Theory of Solitons. Berlin: Springer.
Magri F, Falqui G, and Pedroni M (2003) The method of Poisson
pairs in the theory of nonlinear PDEs. In: Conte R et al. (ed.)
Direct and Inverse Methods in Nonlinear Evolution Equations,
Lecture Notes in Physics, vol. 632, pp. 85–136. Berlin: Springer.
Marsden JE and Ratiu TS (1999) Introduction to Mechanics and
Symmetry, 2nd edn. New York: Springer.
Olver PJ (1993) Applications of Lie Groups to Differential
Equations, 2nd edn. New York: Springer.
Billiards in Bounded Convex Domains
S Tabachnikov, Pennsylvania State University,
University Park, PA, USA
ª 2006 Elsevier Ltd. All rights reserved.
Billiard Flow and Billiard Ball Map
The billiard system describes the motion of a free
particle inside a domain with elastic reflection off the
boundary. More precisely, a billiard table is a
Riemannian manifold M with a piecewise smooth
boundary, for example, a domain in the plane. The
point moves along a geodesic line with a constant speed
until it hits the boundary. At a smooth boundary point,
the billiard ball reflects so that the tangential compo-
nent of its velocity remains the same, while the normal
component changes its sign. This means that both
energy and momentum are conserved. In dimension 2,
this collision is described by a well-known law of
geometrical optics: the angle of incidence equals the
angle of reflection. Thus, the theory of billiards has
much in common with geometrical optics. If the billiard
ball hits a corner, its further motion is not defined.
The billiard reflection law satisfies a variational
principle. Let A and B be fixed points in the billiard
table and let AXB be a billiard trajectory from A to
B with reflection at a boundary point X. Then, the
position of a variable point X extremizes the length
AXB. This is the Fermat principle of geometrical
optics.
In this article, we discuss billiards in bounded
convex domains with smooth boundary, also called
Birkhoff billiards. A related article treats billiards in
polygons (see Polygonal Billiards).
The billiard flow is defined as a continuous-time
dynamical system. The time-t billiard transformation
acts on unit tangent vectors to M which constitute the
phase space of the billiard flow, and the manifold M is
its configuration space. Thus, the billiard flow is the
geodesic flow on a manifold with boundary.
It is useful to reduce the dimensions by one and to
replace continuous time by discrete one, that is, to
replace the billiard flow by a mapping, called the
billiard ball map and denoted by T. The phase space
of the billiard ball map consists of unit tangent
vectors (x, v) with the foot point x on the boundary
of M and the inward direction v. A vector (x, v)
moves along the geodesic through x in the direction
of v to the next point of its intersection x
1
with the
boundary @M, and then v reflects in @M to the new
296 Billiards in Bounded Convex Domains
inward vector v
1
. Then, one has: T(x, v) = (x
1
, v
1
).
For a convex M, the map T is continuous. If M is
n-dimensional, then the dimension of the phase
space of the billiard ball map is 2n 2.
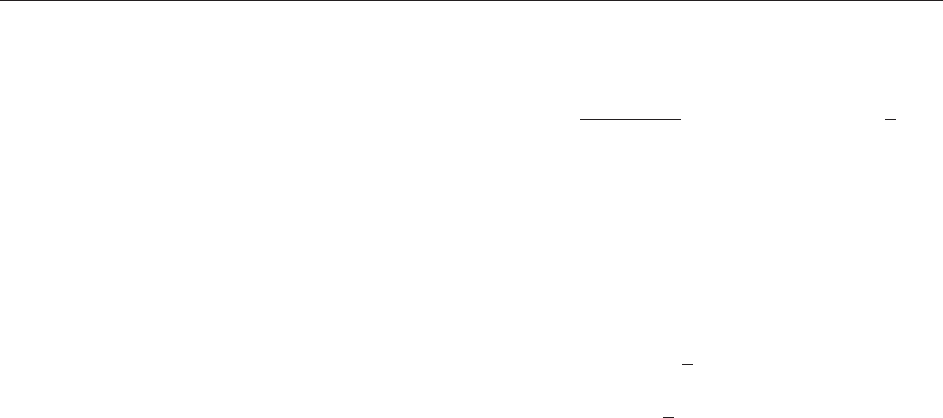
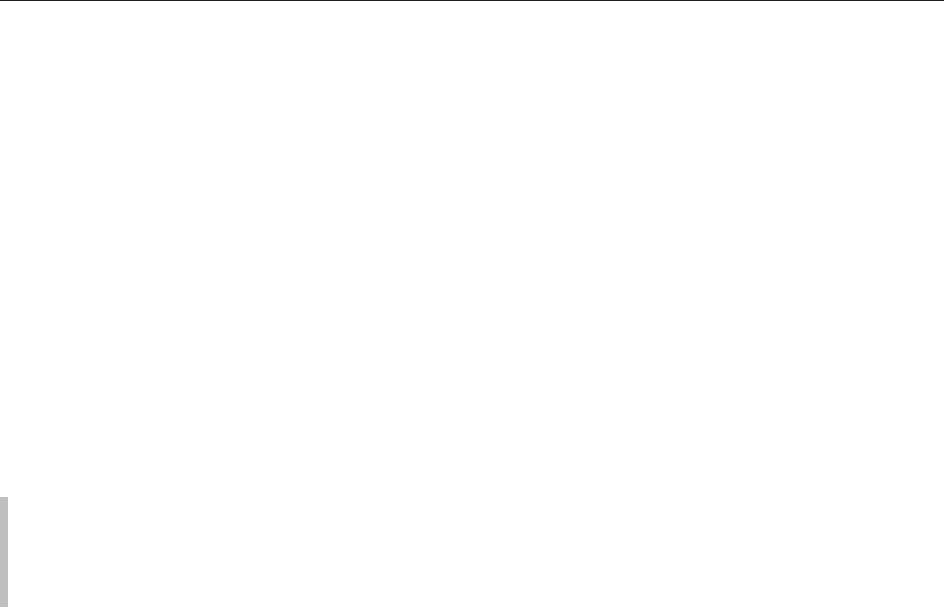
Equivalently, and more in the spirit of geometrical
optics, one considers L, the space of oriented
geodesics (rays of light) that intersect the billiard
table. This space of lines is in one-to-one correspon-
dence with the phase space of the billiard ball map:
to an inward unit vector (x, v) there corresponds the
oriented line through x in the direction v (Figure 1).
The space of rays L carries a canonical symplec-
tic structure, that is, a closed nondegenerate
differential 2-form. In the Euclidean case, this
symplectic structure ! is defined as follows. Given
an oriented line ‘ in R
n
, let q be the unit vector
along ‘ and p be the vector obtained by dropping
the perpendicular from the origin to ‘. Then,
! = dp ^ dq =
P
dp
i
^ dq
i
. This construction identi-
fies L with the cotangent bundle of the unit sphere:
q is a unit vector and p is a (co)tangent vector at q,
and ! identifies with the canonical symplectic
structure of T
S
n1
. In the general case of a
Riemannian manifold M, the symplectic structure
on the space of oriented geodesics is obtained from
that on T
M by symplectic reduction.
One has an important result: the billiard ball map
preserves the symplectic structure T
(!) = !.Asa
consequence, T is also measure preserving. In the
planar case, one has the following explicit formula
for this measure. Let t be an arc length parameter
along the boundary of the billiard table and let
2 [0, ] be the angle made by the unit vector with
this boundary. Then, (, t) are coordinates in the
phase space, identified with the cylinder, and the
invariant measure is sin d dt.
As a consequence, the total area of the phase
space equals 2L where L is the perimeter length of
the boundary of the billiard table, and the mean free
path equals A=L, where A is the area of the billiard
table. In the general n-dimensional case, the mean
free path equals
volðS
n1
Þ
volðB
n1
Þ
volðMÞ
volð@MÞ
where S
n1
and B
n1
are the unit sphere and the unit
disk in Euclidean spaces.
Existence and Nonexistence of Caustics
Given a plane billiard table, a caustic is a curve
inside the table such that if a segment of a billiard
trajectory is tangent to this curve then so is each
reflected segment. Caustics correspond to invariant
circles of the billiard ball map (i.e., invariant curves
that go around the phase cylinder): such an invariant
circle is a one-parameter family of oriented lines,
and the respective caustic is their envelop. An
envelop may have cusp-like singularities but if the
boundary of the billiard table is a smooth curve with
positive curvature then a caustic, sufficiently close to
the boundary, is smooth and convex.
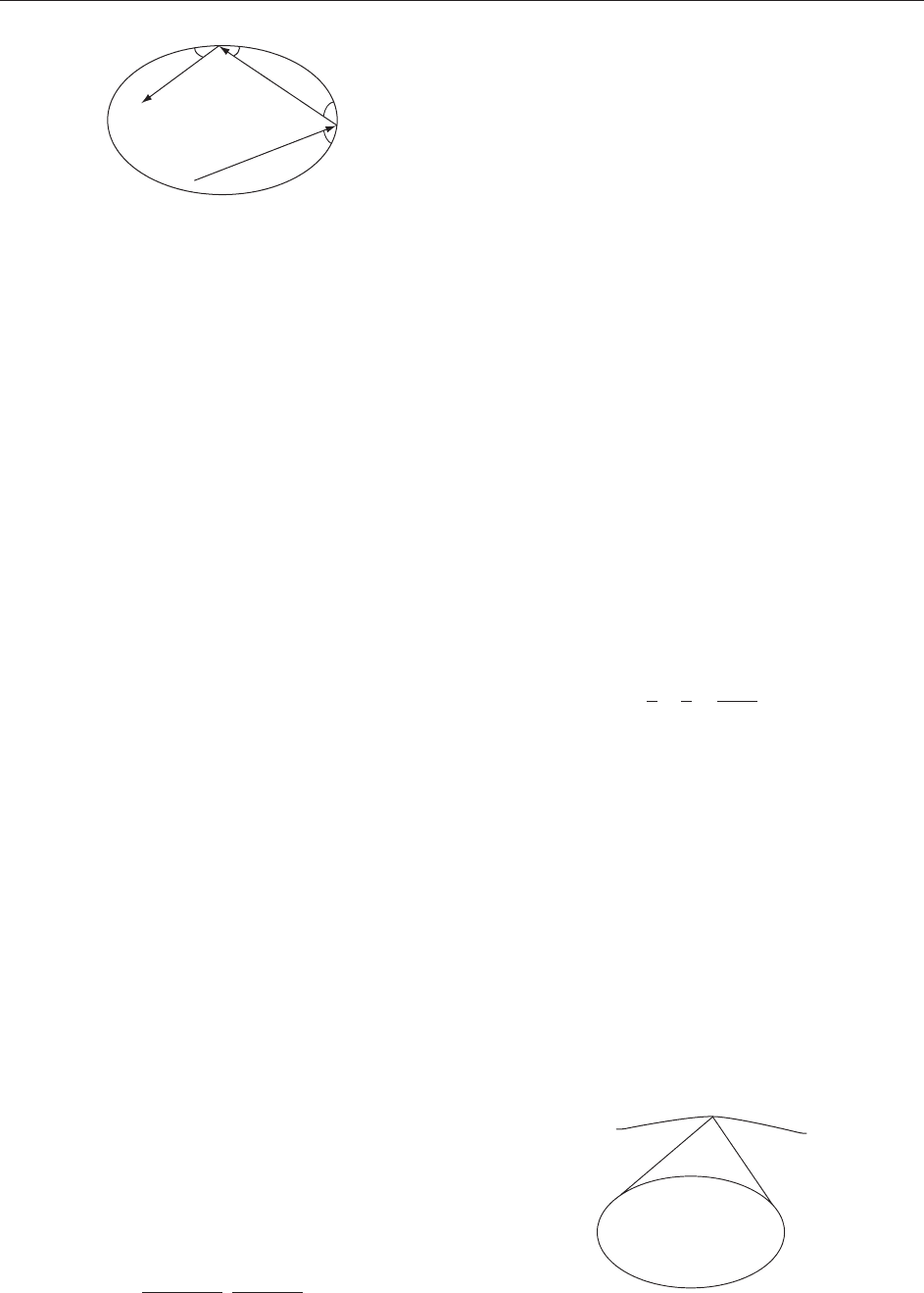
One can recover the table from a caustic by the
following string construction. Let be a caustic.
Wrap a closed nonstretchable string around , pull it
tight at a point and move this point around to
obtain a new curve . Then, is a caustic for the
billiard inside . Note that this construction has one
parameter, the length of the string.
The following useful ‘‘mirror equation’’ relates
various quantities depicted in Figure 2:
1
a
þ
1
b
¼
2k
sin
where k is the curvature of the boundary at the
impact point.
Do caustics exist for every convex billiard table?
This is important to know, in particular, because the
existence of a caustic implies that the billiard ball
map is not ergodic. The answer is given by a
theorem of Lazutkin: if the boundary of the billiard
table is sufficiently smooth and its curvature never
vanishes, then there exists a collection of smooth
caustics in the vicinity of the billiard curve whose
union has a positive area. Originally this theorem
asked for 553 continuous derivatives; later this was
reduced to six. This result uses the techniques of the
KAM (Kolmogorov–Arnol’d–Moser) theory. The
β
β
α
α
Figure 1 Billiard ball map.
k
α
a
α
b
Γ
γ
Figure 2 String construction and mirror equation.
Billiards in Bounded Convex Domains 297
crucial fact is that, in appropriate coordinates, the
billiard ball map is approximated, near the bound-
ary of the phase cylinder, by the integrable map
(x, y) 7!(x þ y, y).
On the other hand, by a theorem of Mather, if the
curvature of a convex smooth billiard curve vanishes
at some point, then this billiard ball map has no
invariant circles. This result belongs to the well-
developed theory of area-preserving twist maps of
the cylinder, of which the billiard ball map is an
example.
Integrable Billiards
Let a plane billiard table be an ellipse with foci F
1
and F
2
. It is known since antiquity that a billiard
ball shot from F
1
reflects to F
2
. A generalization of
this optical property of the ellipse is the following
theorem: a billiard trajectory inside an ellipse
forever remains tangent to a fixed confocal conic.
More precisely, if a segment of a billiard trajectory
does not intersect the segment F
1
F
2
, then all the
segments of this trajectory do not intersect F
1
F
2
and
are all tangent to the same ellipse with foci F
1
and F
2
;
and if a segment of a trajectory intersects F
1
F
2
,
then all the segments of this trajectory intersect F
1
F
2
and are all tangent to the same hyperbola with foci
F
1
and F
2
.
It follows that confocal ellipses are the caustics of
the billiard inside an ellipse. In particular, a
neighborhood of the boundary of such a billiard
table is foliated by caustics. A long-standing
conjecture, attributed to Birkhoff, asserts that if a
neighborhood of a strictly convex smooth boundary
of a billiard table is foliated by caustics, then this
table is an ellipse. This conjecture remains open. The
best result in this direction is a theorem of Bialy: if
almost every phase point of the billiard ball map in a
strictly convex billiard table belongs to an invariant
circle, then the billiard table is a disk.
The multidimensional analogs of the optical
properties of an ellipse are as follows. Consider an
ellipsoid M in R
n
given by the equation
x
2
1
a
2
1
þ
x
2
2
a
2
2
þþ
x
2
n
a
2
n
¼1 ½1
and define the confocal family of quadrics M
by the
equation
x
2
1
a
2
1
þ
þ
x
2
2
a
2
2
þ
þþ
x
2
n
a
2
n
þ
¼ 1
where is a real parameter. The topological type of
M
changes as passes the values a
2
i
.
One has the following theorem: a billiard
trajectory inside M remains tangent to fixed
(n 1) confocal quadrics. A similar and closely
related result holds for the geodesic curves on M:
the tangent lines to a fixed geodesic on M are
tangent to (n 2) other fixed quadrics, confocal
with M. For a triaxial ellipsoid, this theorem goes
back to Jacobi.
Explicit formulas for the integrals of the billiard
in an n-dimensional ellipsoid [1] are as follows. Let
(x, v) be a phase point, a unit inward tangent vector
whose foot point x lies on the boundary. The
following functions are invariant under the billiard
ball map:
F
i
ðx; vÞ¼v
2
i
þ
X
j6¼i
ðv
i
x
j
v
j
x
i
Þ
2
a
2
j
a
2
i
; i ¼ 1; ...; n
these functions are not independent: F
1
þþF
n
= 1.
In fact, the integrals F
i
Poisson-commute (with
respect to the Poisson bracket associated with the
symplectic structure in the phase space of the
billiard ball map that was described above). Accord-
ing to the Arnol’d–Liouville theorem, this complete
integrability of the billiard inside an ellipsoid implies
that the phase space is foliated by invariant tori and,
in appropriate coordinates, the map on each torus is
a parallel translation.
Similar results on complete integrability hold
for billiards inside quadrics in spaces of constant
positive or negative curvature. The former is
the intersection of a quadratic cone with the
unit sphere, and the latter with the unit
pseudosphere.
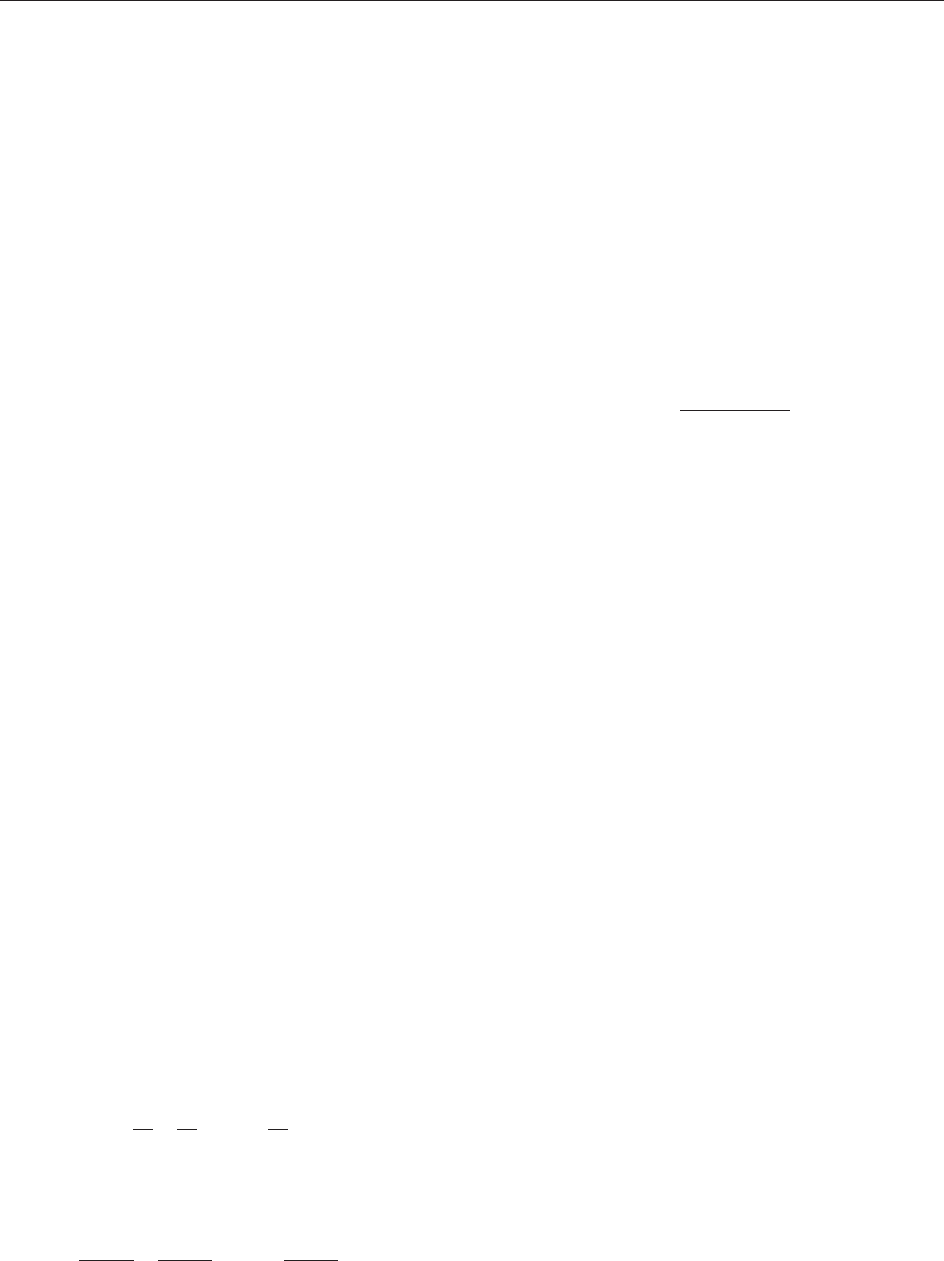
Periodic Orbits
Periodic billiard trajectories inside a planar billiard
table correspond to inscribed polygons of extremal
perimeter length. When counting periodic trajec-
tories, one does not distinguish between polygons
obtained from each other by cyclic permutation or
reversing the order of the vertices. In other words,
one counts the orbits of the dihedral group D
n
acting on n-periodic billiard polygons.
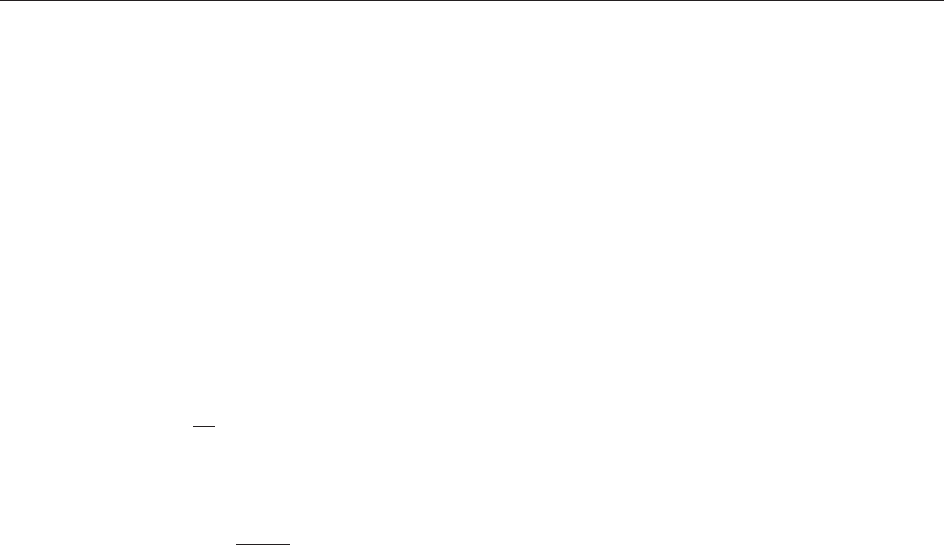
An additional topological characteristic of a
periodic billiard trajectory is the rotation number
defined as follows. Assume that the boundary of a
billiard table is parametrized by the unit circle and
consider a polygon (x
1
, x
2
, ..., x
n
) inscribed in .
For all i, one has x
i þ1
= x
i
þ t
i
with t
i
2 (0, 1). Since
the polygon is closed, t
1
þþt
n
2 Z. This integer,
that takes values from 1 to n 1, is called the
rotation number of the polygon and denoted by .
Changing the orientation of a polygon replaces the
298 Billiards in Bounded Convex Domains
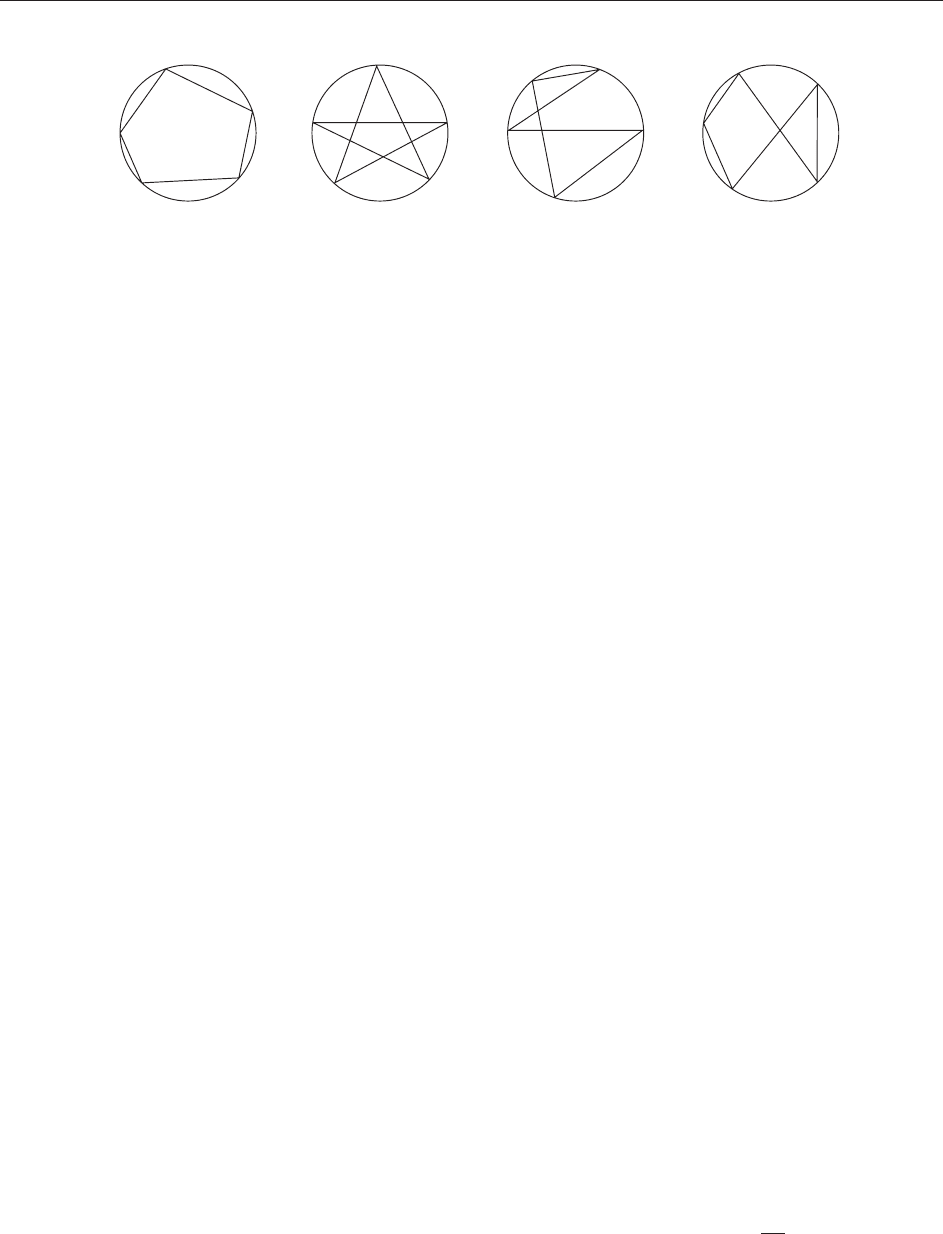
rotation number by n . The leftmost 5-periodic
trajectory in Figure 3 has = 1 and the other three
= 2.
The following theorem is due to Birkhoff: for
every n 2 and b(n 1)= 2c , coprime with n,
there exist two geometrically distinct n-periodic
billiard trajectories with the rotation number . For
example, there are at least two 2-periodic billiard
trajectories inside every smooth oval: one is the
diameter, the longest chord, and another one is of
minimax type, similar to the minor axis of an
ellipse.
In higher dimensions, lower bounds on the
number of periodic billiard trajectories inside strictly
convex domains with smooth boundaries were
obtained only recently by Farber and the present
author. Here is one of the results: for a generic
billiard table in R
m
, the number of n-periodic
trajectories is not less than (n 1)(m 1). The
proof consists in using the Morse theory to estimate
below the number of critical points of the perimeter
length function on the space of inscribed n-gons and
its quotient space by the dihedral group D
n
, and the
main difficulty is in describing the topology of these
spaces.
Returning to convex smooth planar billiards, the
following conjecture remains open for a long time:
the set of n-periodic points of the billiard ball map
has zero measure. This is easy for n = 2; for n = 3
this is a theorem by M Rychlik. The motivation for
this question comes from spectral geometry. In
particular, according to a theorem of Ivrii, the
above conjecture implies the Weyl conjecture on
the second term for the spectral asymptotics of the
Laplacian in a bounded domain with the Dirichlet
or Neumann boundary conditions.
Length Spectrum
The set of lengths of the closed trajectories in a
convex billiard M is called the length spectrum of M.
There is a remarkable relation between the length
spectrum and the spectrum of the Laplace operator
in M with the Dirichlet boundary condition:
f = f , f j
@M
= 0. From the physical point of view,
the eigenvalues are the eigenfrequencies of the
membrane M with a fixed boundary. Roughly
speaking, one can recover the length spectrum from
that of the Laplacian. More precisely, the following
theorem of K Anderson and R Melrose holds:
X
i
2spec
cos t
ffiffiffiffiffiffiffiffi
i
p
is a well-defined generalized function (distribution)
of t, smooth away from the length spectrum. That is,
if l > 0 belongs to the singular support of this
distribution, then there exists either a closed billiard
trajectory of length l, or a closed geodesic of length l
in the boundary of the billiard table.
This relation between the Laplacian and the
length spectrum is due to the fact that geometric
optics is not a very accurate description of light. In
wave optics, light is considered as electromagnetic
waves, and geometric optics gives a realistic approx-
imation only when the wave length is small. This
small-wave approximation is based on the assump-
tion that the waves are locally almost harmonic,
while their amplitudes change slowly from point to
point. The substitution of such a function into the
corresponding PDEs gives, in the first approxima-
tion, the equations of wave fronts, that is, of
geometric optics.
Here is another spectral result concerning a
smooth strictly convex plane domain, due to
S Marvizi and R Melrose. Let L
n
be the supremum
and l
n
the infimum of the perimeters of simple
billiard n-gons. Then,
lim
n!1
n
k
ðL
n
l
n
Þ¼0
for any positive k. Furthermore, L
n
has an asymp-
totic expansion, as n !1,
L
n
l þ
X
1
i¼1
c
i
n
2i
where l is the length of the boundary of billiard table
and c
i
are constants, depending on the curvature of
the boundary.
4
3
2
1
5
4
3
2
1
5
4
3
2
1
5
4
3
2
1
5
Figure 3 Rotation numbers of periodic trajectories.
Billiards in Bounded Convex Domains 299
Acknowledgments
This work was partially supported by NSF.
See also: Adiabatic Piston; Hamiltonian Systems:
Obstructions to Integrability; Hyperbolic Billiards;
Integrable Discrete Systems; Integrable Systems and
Algebraic Geometry; Optical Caustics; Integrable
Systems: Overview; Polygonal Billiards; Semiclassical
Spectra and Closed Orbits; Separatrix Splitting; Stability
Theory and KAM.
Further Reading
Chernov N and Markarian R, Theory of Chaotic Billiards
(to appear).
Farber M and Tabachnikov S (2002) Topology of cyclic
configuration spaces and periodic orbits of multi-dimensional
billiards. Topology 41: 553–589.
Gutkin E (2003) Billiard dynamics: a survey with the emphasis on
open problems. Regular and Chaotic Dynamics 8: 1–13.
Katok A and Hasselblatt B (1995) Introduction to the Modern
Theory of Dynamical Systems. Cambridge: Cambridge
University Press.
Kozlov V and Treshchev D (1991) Billiards. A Genetic Introduc-
tion to the Dynamics of Systems with Impacts. Providence:
American Mathematical Society.
Lazutkin V (1993) KAM Theory and Semiclassical Approxima-
tions to Eigenfunctions. Berlin: Springer.
Moser J (1980) Various Aspects of Integrable Hamiltonian Systems.
Progress in Mathematics, vol. 8, pp. 233–289. Basel: Birhauser.
Siburg KF (2004) The Principle of Last Action in Geometry and
Dynamics, Lecture Notes in Mathematics, vol. 1844. Berlin:
Springer.
Sinai Ya (1976) Introduction to Ergodic Theory. Princeton:
Princeton University Press.
Tabachnikov S (1995) Billiards, Socie´te´ Math. de France,
Panoramas et Syntheses, No 1.
Tabachnikov S (2005) Geometry and Billiards. American Mathe-
matic Society (to appear).
Black Hole Mechanics
A Ashtekar, Pennsylvania State University,
University Park, PA, USA
ª 2006 Elsevier Ltd. All rights reserved.
Introduction
Over the last 30 years, black holes have been
shown to have a number of surprising properties.
These discoveries have revealed unforeseen relations
between the otherwise distinct areas of general
relativity, quantum physics, and statistical
mechanics. This interplay, in turn, led to a number
of deep puzzles at the very foundations of physics.
Some have been resolved while others continue to
baffle physicists. The starting point of these
fascinating developments was the discovery of
laws of black hole mechanics by Bardeen,
Bekenstein, Carter, and Hawking. They dictate the
behavior of black holes in equilibrium, under small
perturbations away from equilibrium, and in fully
dynamical situations. While they are consequences
of classical general relativity alone, they have a
close similarity with the laws of thermodynamics.
The origin of this seemingly strange coincidence lies
in quantum physics. For further discussion,
see Asymptotic Structure and Conformal Infinity;
Loop Quantum Gravity; Quantum Geometry and
Its Applications; Quantum Field Theory in Curved
Spacetime; Stationary Black Holes.
The focus of this article is just on black hole
mechanics. The discussion is divided into three parts.
In the first, we will introduce the notions of event
horizons and black hole regions and discuss properties
of globally stationary black holes. In the second, we
will consider black holes which are themselves in
equilibrium but in surroundings which may be time
dependent. Finally, in the third part, we summarize
what is known in the fully dynamical situations. For
simplicity, all manifolds andfieldsareassumedtobe
smooth and, unless otherwise stated, spacetime is
assumed to be four dimensional, with a metric of
signature , þ , þ , þ , and the cosmological con-
stant is assumed to be zero. An arrow under a
spacetime index denotes the pullback of that index to
the horizon.
Global Equilibrium
To capture the intuitive notion that black hole is a
region from which signals cannot escape to the
asymptotic part of spacetime, one needs a precise
definition of future infinity. The standard strategy is to
use Penrose’s conformal boundary J
þ
.Ablackhole
region B of a spacetime (M, g
ab
)isdefinedasB = Mn
I
(J
þ
), where I
denotes ‘‘chronological past.’’ The
boundary @B of the black hole region is called the
‘‘event horizon’’ and denoted by E.Thus,E is the
boundary of the past of J
þ
. It therefore follows that E is
a null 3-surface, ruled by future inextendible null
geodesics without caustics. If the spacetime is globally
hyperbolic, an ‘‘instant of time’’ is represented by a
Cauchy surface M. The intersection of B with M may
have several disjoint components, each representing a
black hole at that instant of time. If M
0
is a Cauchy
surface to the future of M, the number of disjoint
components of M
0
[ B in the causal future of M [ B
must be less than or equal to those of M [ B
300 Black Hole Mechanics

(see Hawking and Ellis (1973)). Thus, black holes can
merge but can not bifurcate. (By a time reversal, i.e., by
replacing J
þ
with J
and I
with I
þ
, one can define a
whiteholeregionW. However, here we will focus only
on black holes.)
A spacetime (M, g
ab
) is said to be stationary (i.e., time
independent) if g
ab
admits a Killing field t
a
that
represents an asymptotic time translation. By conven-
tion, t
a
is assumed to be unit at infinity. (M, g
ab
)issaid
to be axisymmetric if g
ab
admits a Killing field
a
generating an SO(2) isometry. By convention
a
is
normalized such that the affine length of its integral
curves is 2. Stationary spacetimes with nontrivial Mn
I
(J
þ
) represent black holes which are in global
equilibrium. In the Einstein–Maxwell theory in four
dimensions, there exists a unique three-parameter
family of stationary black hole solutions, generally
parametrized by mass m, angular momentum J,and
electric charge Q. This is the celebrated Kerr–Newman
family. Therefore, in general relativity a great deal of
work on black holes has focused on these solutions and
perturbations thereof. The Kerr–Newman family is
axisymmetric and furthermore, its metric has the
property that the 2-flats spanned by the Killing fields
t
a
and
a
are orthogonal to a family of 2-surfaces. This
property is called ‘‘t– orthogonality.’ ’ These features of
Kerr–Newman space-times are widely used in black
hole physics. Note however that uniqueness fails in
higher dimensions, and also in the presence of
nonabelian gauge fields or rings of perfect fluids around
black holes in four dimensions. In mathematical
physics, there is significant literature on the new
stationary black hole solutions in Einstein–Yang–
Mills–Higgs theories. These are called ‘ ‘hairy black
holes.’’ Research on stationary black hole solutions with
rings received a boost by a recent discovery that these
black holes can violate the Kerr inequality J Gm
2
between angular momentum J and mass m.
A null 3-manifold K in M is said to be a ‘‘Killing
horizon’’ if g
ab
admits a Killing field K
a
which is
everywhere normal to K. On a Killing horizon, one
can show that the acceleration of K
a
is proportional
to K
a
itself:
K
a
r
a
K
b
¼ K
b
½1
The proportionality function is called ‘‘surface
gravity.’’ We will show in the next section that if a
mild energy condition holds on K, then must be
constant. Note that if we rescale K
a
via K
a
!cK
a
,
where c is a constant, surface gravity also rescales as
!c.
In the Kerr–Newman family, the event horizon is
a Killing horizon. More generally, if an axisym-
metric, stationary black hole spacetime (M, g
ab
)
satisfies the t– orthogonality property, its event
horizon E is a Killing horizon. (Although one can
envisage stationary black holes in which these
additional symmetry conditions are not met, this
possibility has been ignored in black hole mechanics
on stationary spacetimes. Quasilocal horizons, dis-
cussed below, do not require any spacetime symme-
tries.) In these cases, the normalization freedom in
K
a
is fixed by requiring that K
a
have the form
K
a
¼ t
a
þ
a
½2
on the horizon, where is a constant, called the
‘‘angular velocity of the horizon.’’ The resulting is
called the surface gravity of the black hole. It is
remarkable that is constant for all such black
holes, even when their horizon is highly distorted
(i.e., far from being spherically symmetric) either
due to rotation or due to external matter fields. This
is analogous to the fact that the temperature of a
thermodynamical system in equilibrium is constant,
independently of the details of the system. In
analogy with thermo dynamics, constancy of is
referred to as the ‘‘zeroth law of black hole
mechanics.’’
Next, let us consider an infinitesimal perturbation
within the three-parameter Kerr–Newman family.
A simple calculation shows that the changes in the
Arnowitt–Deser–Misner (ADM) mass m, angular
momentum J, and the total charge Q of the
spacetime and in the area a of the horizon are
constrained via
m ¼
8G
a þ J þ Q ½3
where the coefficients , , are black hole para-
meters, =A
a
K
a
being the electrostatic potential at
the horizon. The last two terms, J and Q, have
the interpretation of ‘‘work’’ required to spin the
black hole up by an amount J or to increase its
charge by Q. Therefore, [3] has a striking resem-
blance to the first law, E = TS þ W, of thermo-
dynamics if (as the zeroth law suggests) is made
proportional to the temperature T, and the horizon
area a to the entropy S. Therefore, [3] and its
generalizations discussed below are referred to as
the ‘‘first law of black hole mechanics.’’
In Kerr–Newman spacetimes, the only contribu-
tion to the stress–energy tensor come s from the
Maxwell field. Bardeen et al. (1973) consider
stationary black holes with matter such as perfect
fluids in the exterior region and stationary perturba-
tions thereof. Using Einstein’s equations, they
show that the form [3] of the first law does not
change; the only modification is addition of certain
matter terms on the right-hand side which can be
Black Hole Mechanics 301
interpreted as the work W done on the total
system. A generalization in another direction was
made by Iyer and Wald (1994) using Noether
currents. They allow nonstationary perturbations
and, more importantly, drop the restriction to
general relativity. Instead, they consider a wide
class of diffeomorphism-invariant Lagrangian
densities L(g
ab
, R
abcd
, r
a
R
bcde
, ...,
..
..
, r
a
..
..
, ...)
which depend on the metric g
ab
, matter fields
..
..
,
and a finite number of derivatives of the Riemann
tensor and matter fields. Finally, they restrict
themselves to 6¼ 0. In this case, on the maximal
analytic extension of the spacetime, the Killing field
K
a
vanishes on a 2-sphere S
o
called the bifurcate
horizon. Then, [3] is generalized to
m ¼
2
S
hor
þ W ½4
Here W again represents ‘‘work terms’’ and S
hor
is
given by
S
hor
¼2
I
S
o
L
R
abcd
n
ab
n
cd
½5
where n
ab
is the binormal to S
o
(with n
ab
n
ab
= 2),
and the functional derivative inside the integral is
evaluated by formally viewing the Riemann tensor
as a field independent of the metric. For the
Einstein–Hilbert action, this yields S
hor
= a=4 G and
one recovers [3].
These results are striking. However, the under-
lying assumptions have certain unsatisfactory
aspects. First, although the laws are meant to refer
just to black holes, one assumes that the entire
spacetime is stationary. In thermodynamics, by
contrast, one only assum es that the system under
consideration is in equilibrium, not the whole
universe. Second, in the first law, quantities a, ,
are evaluated at the horizon while M, J are
evaluated at infinity and include contributions from
possible matter fields outside the black hole. A more
satisfactory law of black hole mechanics would
involve attributes of the black hole alone. Finally,
the notion of the event horizon is extremely global
and teleological since it explicitly refers to J
þ
.An
event horizon may well be developing in the very
room you are sitting today in anticipation of a
gravitational collapse in the center of our galaxy
which may occur a billion years hence. This feature
makes it impossible to generalize the first law to
fully dynamical situations an d relate the change in
the event horizon area to the flux of energy and
angular momentum falling across it. Indeed, one can
construct explicit examples of dynamical black holes
in which an event horizon E forms and grows in the
flat part of a spacetime where nothing happens
physically. These considerations call for a replace-
ment of E by a quasilocal horizon which leads to a
first law involving only horizon attributes, and
which can grow only in response to the influx of
energy. Such horizons are discussed in the next two
sections.
Local Equilibrium
The key idea here is drop the requirement that
spacetime should admit a stationary Killing field and
ask only that the intrinsic horizon geometry be time
independent. Consider a null 3-surface in a
spacetime (M, g
ab
) with a future-pointing normal
field ‘
a
. The pullback q
ab
:= g
ab
of the spacetime
metric to is the intrinsic, degenerate ‘‘metric’’ of
with signature 0, þ , þ . The first condition is that it
be ‘‘time independent,’’ that is, L
‘
q
ab
= 0on.
Then by restriction, the spacetime derivative opera-
tor r induces a natural derivative operator D on .
While D is compatible with q
ab
, that is, D
a
q
bc
= 0, it
is not uniquely determined by this property because
q
ab
is degenerate. Thus, D has extra information,
not contained in q
ab
. The pair (q
ab
, D) is said to
determine the intrinsic geometry of the null surface
. This notion leads to a natural definition of a
horizon in local equilibrium. Let be a null, three-
dimensional submanifold of (M, g
ab
) with topology
S R, where S is compact and without boundary.
Definition 1 is said to be ‘‘isolated horizon’’ if it
admits a null normal ‘
a
such that:
(i) L
‘
q
ab
= 0 and [L
‘
, D] = 0on and
(ii) T
a
b
‘
b
is a future pointing causal vector on .
On can show that, generically, this null normal field
‘
a
is unique up to rescalings by positive constants.
Both conditions are local to . In particular, (M, g
ab
)
is not required to be asymptotically flat and there is no
longer any teleological feature. Since is null and
L
‘
q
ab
= 0, the area of any of its cross sections is the
same, denoted by a
. As one would expect, one can
show that there is no flux of gravitational radiation or
matter across . This captures the idea that the black
hole itself is in equilibrium. Condition (ii) is a rather
weak ‘‘energy condition’’ which is satisfied by all
matter fields normally considered in classical general
relativity. The nontrivial condition is (i). It extracts
from the notion of a Killing horizon just a ‘‘tiny part’’
that refers only to the intrinsic geometry of .Asa
result, every Killing horizon K is, in particular, an
isolated horizon. However, a spacetime with an
isolated horizon can admit gravitational radiation
and dynamical matter fields away from . In fact, as a
family of Robinson–Trautman spacetimes illustrates,
302 Black Hole Mechanics

gravitational radiation could even be present arbitra-
rily close to . Because of these possibilities, there are
many nontrivial examples and the transition from
event horizons of stationary spacetimes to isolated
horizons represents a significant generalization of
black hole mechanics. (In fact, the derivation of the
zeroth and the first law requires slightly weaker
assumptions, encoded in the notion of a ‘‘weakly
isolated horizon’ ’ (Ashtekar et al. 2000, 2001).)
An immediate consequence of the requirement
L
‘
q
ab
= 0 is that there exists a 1-form !
a
on such
that D
a
‘
b
= !
a
‘
b
. Following the definition of on a
Killing horizon, the surface gravity
(‘)
of (, ‘)is
defined as
(‘)
= !
a
‘
a
. Again, under ‘
a
!c‘
a
, we have
(c‘)
= c
‘
. Together with Einstein’s equations, the
two conditions of Definition 1 imply L
‘
!
a
= 0 and
‘
a
D
[a
!
b]
= 0. The Cartan identity relating the Lie
and exterior derivative now yields
D
a
ð!
b
‘
b
ÞD
a
ð‘Þ
¼ 0 ½6
Thus, surface gravity is consta nt on every isolate d
horizon. This is the zeroth law, extended to horizons
representing local equilibrium. In the presence of an
electromagnetic field, Definition 1 and the field
equations imply L
‘
F
ab
= 0 and ‘
a
F
ab
= 0. The first of
these equations implies that one can always choose a
gauge in which L
‘
A
a
= 0. By Cartan identity it then
follows that the electrostatic potential
(‘)
:= A
a
‘
a
is
constant on the horizo n. This is the Maxwell analog
of the zeroth law.
In this setting, the first law is derived using a
Hamiltonian framework (Ashtekar et al. 2000,
2001). For concreteness, let us assume that we are
in the asymptotically flat situation and the only
gauge field present is electromagnetic. One begins by
restricting oneself to horizon geometries such that
admits a rotational vector field ’
a
satisfying
L
’
q
ab
= 0. (In fact for black hole mechanics, it
suffices to assume only that L
’
ab
= 0, where
ab
is
the intrinsic area 2-form on . The same is true on
dynamical horizons discussed in the next section.)
One then constructs a phase space G of gravitational
and matter fields such that (1) M admits an internal
boundary which is an isolated horizon; and (2) all
fields satisfy asymptotically flat boundary conditions
at infinity. Note that the horizon geometry is
allowed to vary from one phase-space point to
another; the pair (q
ab
, D) induced on by the
spacetime metric only has to satisfy Definition 1 and
the condition L
’
q
ab
= 0.
Let us begin with angular momentum. Fix a
vector field
a
on M which coincides with the fixed
’
a
on and is an asymptotic rotational symmetry
at infini ty. (Note that
a
is not restricted in any way
in the bulk.) Lie derivatives of gravitational and
matter fields along
a
define a vector field X()on
G. One shows that it is an infinitesimal canonical
transformation, that is, satisfies L
X()
W = 0, where W
is the symplectic structure on G . The Hamiltonian
H() generating this can onical transformation is
given by
HðÞ¼J
ðÞ
J
ðÞ
1
J
ðÞ
¼
1
8G
I
S
ð!
a
a
Þ
1
4
I
S
ðA
a
a
Þ
?
F
½7
where J
()
1
is the ADM angular momentum at
infinity, S is any cross section of ,and the area
element thereon. The term J
()
is independent of the
choice of S made in its evaluatio n and interpreted as
the ‘‘horizon angular momentum.’’ It ha s numerous
properties that support this interpretation. In parti-
cular, it yields the standard angular momentum
expression in Kerr–Newman spacetimes.
To define horizon energy, one has to introduce a
‘‘time-translation’’ vector field t
a
. At infinity, t
a
must
tend to a unit time translation. On , it must be a
symmetry of q
ab
. Since ‘
a
and ’
a
are both horizon
symmetries, t
a
= c‘
a
þ ’
a
on , for some constants
c and . However , unlike
a
, the restriction of t
a
to
cannot be fixed once and for all but must be
allowed to vary from one phase-space point to
another. In particular, on physical grounds, one
expects to be zero at a phase-space point
representing a nonrotating black hole but nonzero
at a point representing a rotating black hole. This
freedom in the boundary value of t
a
introduces a
qualitatively new element. The vector field X(t)onG
defined by the Lie derivatives of gravitational and
matter fields does not, in general, satisfy L
X(t)
W = 0;
it need not be an infinitesimal canonical transforma-
tion. The necessary and sufficient condition is that
(
(c‘)
=8G)a
þ J
þ
(c‘)
Q
be an exact var-
iation. That is, X(t) generates a Hamiltonian flow if
and only if there exists a function E
(t)
on G such that
E
ðtÞ
¼
ðc‘Þ
8G
a
þ J
þ
ðc‘Þ
Q
½8
This is precisely the first law. Thus, the framework
provides a deeper insight into the origin of the first
law: it is the necessary and sufficient condition for
the evolution generated by t
a
to be Hamiltonian.
Equation [8] is a genuine restriction on the choice of
phase-space functions c an d , that is, of restrictions
to of evolution fields t
a
. It is easy to verify that M
admits many such vector fie lds. Given one, the
Hamiltonian H(t) generating the time evolution
along t
a
takes the form
HðtÞ¼E
ðtÞ
1
E
ðtÞ
½9
Black Hole Mechanics 303

re-enforcing the interpretation of E
(t)
as the horizon
energy.
In general, there is a multitude of first laws, one for
each vector field t
a
, the evolution along which preserves
the symplectic structure. In the Einstein–Maxwell
theory, given any phase-space point, one can choose a
canonical boundary value t
a
o
exploiting the uniqueness
theorem. E
(t
o
)
is then called the horizon mass and
denoted simply by m
.IntheKerr–Newmanfamily,
H(t
o
) vanishes and m
coincides with the ADM mass
m
1
. Similarly, if
a
is chosen to be a global rotational
Killing field, J
()
equals J
()
1
. However, in more general
spacetimes where there is matter field or gravitational
radiation outside , these equalities do not hold; m
and J
represent quantities associ ated with the
horizon alone while the ADM quantities represent
the total mass and angular momentum in the space-
time, including contributions from matter fields and
gravitational radiation in the exterior region. In the
first law [8], only the contributions associated with
the horizon appear.
When the uniq ueness theorem fails, as, for
example, in the Einstein–Yang –Mills–Higgs theory,
first laws continue to hold but the horizon mass m
becomes ambiguous. Interestingly, these ambiguities
can be exploited to relate properties of hairy black
holes with those of the corresponding solitons. (For
a summary, see Ashtekar and Krishnan (2004).)
Dynamical Situations
A natural question now is whether there is an analog of
the second law of thermodynamics. Using event
horizons, Hawking showed that the answer is in the
affirmative (see Hawking and Ellis (1973)). Let (M, g
ab
)
admit an event horizon E.Denoteby‘
a
a geodesic null
normal to E. Its expansion is defined as
(‘)
:= q
ab
r
a
‘
b
,
where q
ab
is any inverse of the degenerate intrinsic
metric q
ab
on E, and determines the rate of change of the
area element of E along ‘
a
. Assuming that the null energy
condition and Einstein’s equations hold, the Raychaud-
huri equation immediately implies that if
(‘)
were to
become negative somewhere it would become infinite
within a finite affine parameter. Hawking showed that,
if there is a globally hyperbolic region containing
I
(J
þ
) [E– that is, if there are no naked singularities
– this can not happen, whence (‘) 0onE. Hence, if a
cross section S
2
of E is to the future of a cross section S
1
,
we must have a
S
2
a
S
1
. Thus, in any (i.e., not
necessarily infinitesimal) dynamical process, the change
a in the horizon area is always non-negative. This
result is known as the ‘ ‘second law of black hole
mechanics.’’ As in the first law, the analog of entropy is
the horizon area.
It is tempting to ask if there is a local physical
process directly responsible for the growth of area.
For event horizons, the answer is in the negative
since they can grow in a flat portion of spacetime.
However, one can introduce quasilocal horizons
also in the dynamical situations and obtain the
desired result (Ashtekar and Krishnan 2003). These
constructions are strong ly motivated by earlier ideas
introduced by Hayward (1994).
Definition 2 A three-dimensional spacelike sub-
manifold H of (M, g
ab
) is said to be a ‘‘dynamical
horizon’’ if it admits a foliation by compact
2-manifolds S (without boundary) such that:
(i) the expansion
(‘)
of one (future directed) null
normal field ‘
a
to S vanishes and the expansion
of the other (future directed) null normal field,
n
a
is negative; and
(ii) T
a
b
‘
b
is a future pointing causal vector on H.
One can show that this foliation of H is unique and
that S is either a 2-sphere or, under degenerate and
physically over-restrictive conditions, a 2-torus. Each
leaf S isamarginallytrappedsurfaceandreferredtoasa
‘‘cut’’ of H. Unlike event horizons E, dynamical horizons
Hare locally defined and do not display any teleological
feature. In particular, they cannot lie in a flat portion of
spacetime. Dynamical horizons commonly arise in
numerical simulations of evolving black holes as world
tubes of apparent horizons. As the black hole settles
down, H asymptotes to an isolated horizon ,which
tightly hugs the asymptotic future portion of the event
horizon. However, during the dynamical phase, H
typically lies well inside E.
The two conditions in Definition 2 immediately
imply that the area of cuts of H increases mono-
tonically along the ‘‘outward direction’’ defined by
the projection of ‘
a
on H. Furthermore, this change
turns out to be directly related to the flux of energy
falling across H. Let R denote the ‘‘radius function’’
on H so that the area of any cut S is given by
a
S
= 4R
2
. Let N denote the norm of @
a
R and H,
the portion of H bounded by two cross sections S
1
and S
2
. The appropriate energy turns out to be
associated with the vector field N‘
a
, where ‘
a
is
normalized such that its projection on H is the unit
normal
^
r
a
to the cuts S. In the generic and
physically interesting case when S is a 2-sphere, the
Gauss and the Codazzi (i.e. , constraint ) equations
imply
1
2G
ðR
2
R
1
Þ¼
Z
H
T
ab
N‘
a
^
b
d
3
V þ
1
16G
Z
H
N
ab
ab
þ2
a
a
d
3
V ½10
304 Black Hole Mechanics