Francoise J.-P., Naber G.L., Tsun T.S. (editors) Encyclopedia of Mathematical Physics
Подождите немного. Документ загружается.


admits a proper strictly plurisubharmonic function
: X ! R. An important result says that X is Stein
if and only if it can be realized as a closed complex
submanifold of C
n
. Clearly any noncritical level set
of gives a contact manifold.
Contact manifolds also give rise to an interesting
class of differential operators. Specifical ly, a contact
structure on M defines a symbol-filtered algebra of
pseudodifferential operators
(M), called the
‘‘Heisenberg calculus.’’ Operators in this algebra
are modeled on smooth families of convolution
operators on the Heisenberg group. An important
class of operators of this type are the ‘‘sum-of-
squares’’ operators. Locally, the highest-order part
of such an operator takes the form
L ¼
X
2n
j¼1
v
2
j
þ iav
½7
where {v
1
, ..., v
2n
} is a local framing for the contact
field and v
is a Reeb vector field. This operator
belongs to
2
(M) and is subel liptic for a outside a
discrete set.
Hamiltonian Dynamics
Given a symplectic manifold (X, !), a function
H : X !R will be called a Hamiltonian. (Only
autonomous Hamiltonians are discussed here.) The
unique vector field satisfying
v
H
! ¼dH
is called the Hamiltonian vector field associated to
H. Many problems in classical mechanics can be
formulated in terms of studying the flow of v
H
for
various H.
Example 8 If (X, !) = (R
2n
,d), where is from
Example 2, then the flow of the Ham iltonian vector
field is given by
_
q ¼
@H
@p
;
_
p ¼
@H
@q
A standard fact says that the flow of v
H
preserves
the level sets of H.
Theorem 7 If M is a level set of H corresponding
to a regular value and M is a hypersurface of contact
type, then the trajectories of v
H
and of the Reeb
vector field (associated to M in Theorem 3) agree.
Thus under suitable hypothesis, Hamiltonian
dynamics is a reparametrization of Reeb dynamics.
In particular, searching for periodic orbits in such a
Hamiltonian system is equivalent to searching for
periodic orbits in a Reeb flow. Thus in this context,
Weinstein’s conjecture asserts a positive answer to
the questions: Does the Hamiltonian flow along a
regular level set of contact type have a periodic
orbit? Viterbo proved that the answer was yes if the
hypersurface is compact and in (R
2n
, ! = d). Other
progress has been made by studying Reeb dynamics.
Geometric Optics
In this section, we study the propagation of light (or
various other disturbances) in a medium (for the
moment, we do not specify the properties of this
medium). The medium will be given by a three-
dimensional manifold M. Given a point p in M and
t > 0, let I
p
(t) be the set of all points to whi ch light
can travel in time t. The wave front of p at time t
is the boundary of this set and is denoted as
p
(t) = @I
p
(t).
Theorem 8 (Huygens’ principle).
p
(t þ t
0
) is the
envelope of the wave fronts
q
(t
0
) for all q 2
p
(t).
This is best understood in terms of contact
geometry. Let :(T
Mn{0}) !P
M be the natural
projection (see Example 3) and let S be any smooth
sub-bundle of T
Mn{0} that is transverse to the radial
vector field in each fiber and for which j
S
: S !P
M
is a diffeomorphism. The restriction of the Liouville
form to S gives a contact form and a corresponding
Reeb vector field v. Given a subset F of M with a well-
defined tangent space at every point set
L
F
¼fp 2 S : ðpÞ2F and pðwÞ¼0 for all
w 2 T
ðpÞ
Fg½8
The set L
F
is a Legendrian submanifold of S and is
called the ‘ ‘Legendrian lift’’ of F.IfL is a generic
Legendrian submanifold in S,then(L) is called the
front projection of L and L
(L)
= L. Given a Legendrian
submanifold L,let
t
(L) be the Legendrian submani-
fold obtained from L by flowing along v for time t.
Example 9 Given a metric g on M, Fermat’s
principle says that light travels along geodesics.
Thus, if S is the unit cotangent bundle, then using g
to identify the geodesic flow with the Reeb flow
one sees that light will travel along trajectories
of the Reeb vector field. Given a point p in M,
the Legendrian submanifold L
p
is a sphere sitting
in T
p
M. The Huygens principle follow s from the
observation that
p
(t) = (
t
(L
p
)).
Using the more general S discussed above, one can
generalize this example to light traveling in a medium
that is nonhomogeneous (i.e., the speed differs from
point to point in M) and anisotropic (i.e., the speed
differs depending on the direction of travel).
Contact Manifolds 635

See also: Hamiltonian Fluid Dynamics; Integrable Systems
and Recursion Operators on Symplectic and Jacobi
Manifolds; Minimax Principle in the Calculus of Variations.
Further Reading
Aebisher B, Borer M, Ka¨lin M, Leuenberger Ch, and Reimann
HM (1994) Symplectic Geometry, Progress in Mathematics,
vol. 124. Basel: Birkha¨ user.
Arnol’d VI (1989) Mathematical Methods of Classical Mechanics,
Graduate Texts in Mathematics, vol. 60, xviþ516, pp. 163–179.
New York: Springer.
Arnol’d VI (1990) Contact Geometry: The Geometrical Method of
Gibbs’s Thermodynamics, Proceedings of the Gibbs Symposium.
(New Haven, CT, 1989), pp. 163–179. Providence, RI: American
Mathematical Society.
Beals R and Greiner P (1988) Calculus on Heisenberg manifolds.
Annals of Mathematics Studies 119.
Eliashberg Y, Givental A, and Hofer H (2000) Introduction to
Symplectic Field Theory, GAFA 2000 (Tel Aviv, 1999), Geom.
Funct. Anal. 2000, Special Volume, Part II, pp. 560–673.
Etnyre J. Legendrian and transversal knots. Handbook of Knot
Theory (in press).
Etnyre J (1998) Symplectic Convexity in Low-Dimensional
Topology, Symplectic, Contact and Low-Dimensional Topol-
ogy (Athens, GA, 1996), Topology Appl., vol. 88, No. 1–2,
pp. 3–25.
Etnyre J and Ng L (2003) Problems in Low Dimensional Contact
Topology, Topology and Geometry of Manifolds (Athens,
GA, 2001), pp. 337–357, Proc. Sympos. Pure Math., vol. 71.
Providence, RI: American Mathematical Society.
Geiges H Contact geometry. Handbook of Differential Geometry,
vol. 2 (in press).
Geiges H (2001a) Contact Topology in Dimension Greater than
Three, European Congress of Mathematics, vol. II (Barcelona,
2000), Progress in Mathematics, vol. 202, pp. 535–545. Basel:
Birkha¨user.
Geiges H (2001b) A brief history of contact geometry and
topology. Expositiones Mathematicae 19(1): 25–53.
Ghrist R and Komendarczyk R (2001) Topological features of
inviscid flows. An Introduction to the Geometry and Topology
of Fluid Flows (Cambridge, 2000), 183–201, NATO Sci. Ser. II
Math. Phys. Chem., vol. 47. Dordrecht: Kluwer Academic.
Giroux E (2002) Ge´ome´trie de contact: de la dimension trois
vers les dimensions supe´rieures, Proceedings of the Inter-
national Congress of Mathematicians, vol. II (Beijing, 2002),
pp. 405–414. Beijing: Higher Ed. Press.
Hofer H and Zehnder E (1994) Symplectic Invariants and
Hamiltonian Dynamics, Birkha¨user Advanced Texts: Basler
Lehrbu¨ cher, pp. xivþ341. Basel: Birkha¨user.
Taylor ME (1984) Noncommutative Microlocal Analysis, Part I,
Mem Amer. Math. Soc., 52, no. 313. American Mathematical
Society.
Control Problems in Mathematical Physics
B Piccoli, Istituto per le Applicazioni del Calcolo,
Rome, Italy
ª 2006 Elsevier Ltd. All rights reserved.
Introduction
Control Theory is an interdisciplinary research area,
bridging mathematics and engineering, dealing with
physical systems which can be ‘‘controlled,’’ that is,
whose evolution can be influenced by some external
agent. A general model can be written as
yðtÞ¼Að t; yð0Þ; uðÞÞ ½1
where y describes the state variables, y(0) the initial
condition, and u() the control function. Thus, eqn
[1] means that the state at time t depends on the
initial condit ion but also on some parameters u
which can be chosen as function of time. To be
precise, there are some control problems which are
not of evolutiona ry type; however, in this presenta-
tion we restrict ourselves to this case.
One has to distinguish among the control set U where
the control function can take values: u(t) 2U,andthe
space of control functions, U, to which each control
function should belong: u() 2U. Thus, for example,
we may have U = R
m
and U = L
1
([0, T], R
m
).
There are various problems one can formulate
regarding systems of type [1], among which:
Controllability Given any two states y
0
and y
1
determine a control function u() such that for
some time t > 0wehavey
1
= A(t, y
0
, u()).
Optimal control Consider a cost function J(y(),
u()) depending both on the evolutions of y and u
and determine a control function
~
u() and a
trajectory
~
y(t) = A(t , y
0
,
~
u()) such that
~
y() steers
the system from y
0
to y
1
, as before, and the cost J
is minimized (or maximized).
Stabilization We say that
y is an equilibrium if
there exists
u 2 U such that A(t,
y,
u) =
y for every
t > 0 (here
u indicates also the constant in time
control function). Determine the control u as
function of the state y so that
y is a (Lyapunov)
stable equilibrium for the uncontrolled dynamical
system y(t ) = A(t, y(0), u(y())).
Observability Assume that we can observe not the
state y, but a function (y) of the state. Determine
conditions on so that the state y can be
reconstructed from the evolution of (y) choosing
u() suitably.
For the sake of simplicity, we restrict ourselves
mainly to the first two problems and just mention
636 Control Problems in Mathematical Physics
some facts about the others. Also, we focus on two
cases:
Control of ordinary differential equations (ODEs)In
this case t 2 R, y 2 R
n
, U is a set, typically
U R
m
,andA is determined by a controlled ODE
_
y ¼ f ðt; y; uÞ½2
A typical example in mathematical physics is the
control of mechanical systems (Bloch 2003, Bullo
and Lewis 2005).
Control of partial differential equations (PDEs)In
this case t 2 R, x 2 R
n
, y(x) belongs to a Banach
functional space, for example, H
s
(R
nþ1
, R), U is a
functional space, and A is determined by a
controlled PDE,
Fðt; x; y; y
t
; y
x
1
; ...; y
x
n
; y
t
; ...; uÞ¼0 ½3
A typical example in mathematical physics is the
control of wave equation using boundary condi-
tions, see below.
There are various other possible situations we do
not treat here: ‘ ‘stochastic control,’ ’ when y is a random
variable and A defined by a (controlled) sto-
chastic differential equation; ‘ ‘discrete time control,’’
where t 2 N; ‘ ‘hybrid control,’ ’ where t and y may have
both discrete and continuous components, and so on.
As shown above, the control law can be assigned
in (at least) two basically different ways. In open-
loop form, as a function of time: t ! u(t), and in
closed-loop form or feedback, as a function of the
state: y ! u(y). For example, in optimal control we
look for a control
~
u(t) in open-loop form, while in
stabilization we search for a feedback control u(y).
The open -loop control depends on y(0), while a
feedback control can stabilize regardless of the
initial condition.
Example 1 A point with unit mass moves along a
straight line; if a controller is able to apply an
external force u, then, calling y
1
(t), y
2
(t), respec-
tively, the position and the velocity of the point at
time t, the motion is described by the control system
ð
_
y
1
;
_
y
2
Þ¼ðy
2
; uÞ½4
It is easy to check that the feedback control
u(y
1
, y
2
) = y
1
y
2
stabilizes the system asymptot-
ically to the origin, that is, for every initial data
(
y
1
,
y
2
), the solution of the corresponding Cauchy
problem satisfies lim
t !1
(y
1
, y
2
)(t ) = (0, 0).
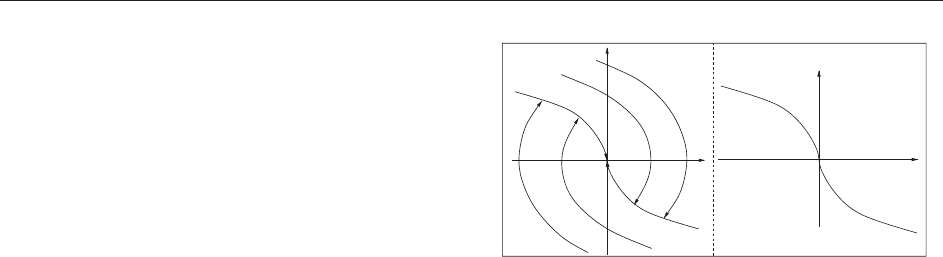
Another simple problem consists in driving the
point to the origin with zero velocity in minimum
time from given initial data. It is quite easy to see
that the optimal strategy is to accelerate towards the
origin with maximum force on some interval [0, t]
and then to decelerate with maximum force to reach
the origin at velocity zero. The set of optimal
trajectories is depicted in Figure 1a: they can
be obtained using the following discontinuous
feedback, see Figure 1b. Define the curves
= {(y
1
, y
2
): y
2
> 0, y
1
= y
2
2
} and let be
defined as the union
[ {0}. We define A
þ
to be
the region below and A
the one above. Then the
feedback is given by
uðxÞ¼
þ1ifðy
1
; y
2
Þ2A
þ
[
þ
1ifðy
1
; y
2
Þ2A
[
0ifðy
1
; y
2
Þ¼ð0; 0Þ
8
<
:
Example 2 Consider a (one-dimensional) vibrating
string of unitary length with a fixed endpoint. The
model for the motion of the displacement of the
string with respect to the rest position is given by
y
tt
þ y ¼ 0; yðt; 0Þ¼0 ½5
with initial data
yð0; Þ ¼ y
0
; y
t
ð0; Þ ¼ y
1
½6
Assume that we can control the position of the
second endpoint; then,
yðt; 1Þ¼uðtÞ½7
for some control function u() 2R.
Let us introduce another key concept: the reach-
able set at time t from
y is the set
Rðt;
yÞ¼fAðt;
y; uðÞÞ: uðÞ2Ug
Various problems can be formulated in terms of
reachable sets, for example, controllability requires
that for every
y the union of all R(t;
y)ast !1
includes the entire space. The dependence of R(t;
y)
on time t and on the set of controls U is also a
subject of investigation: one may ask whether the
same points in R(t;
y) can be reached by using
controls which are piecewise constant, or take
values within some subsets of U.
y
2
ζ
+
u(y) = –1
u(y)
= +1
ζ
–
(u
=
–
1)
(u
=
+1)
y
1
y
1
y
2
Figure 1 Example 1. The simplest example of (a) optimal
synthesis and (b) corresponding feedback.
Control Problems in Mathematical Physics 637

Control of ODEs
For most proofs we refer to Agrachev and Sachkov
(2004) and Sontag (1998).
Controllability
Consider first the case of a linear system:
_
y ¼ Ay þ Bu; u 2 U; yð0 Þ¼y
0
½8
where y, y
0
2 R
n
, U R
m
, A is an n n matrix and
B an n m matrix. We have the following property
of reachable sets:
Theorem 1 If U is compact convex then the
reachable set R(t) for [8] is compact and convex.
A control system [8] is controllable if taking
U = R
m
we have R(t) = R
n
for every t > 0. By
linearity, this is equivalent to requiring the reachable
set to be a neighborhood of the origin in case of
bounded controls. Define the controllability matrix
to be the n nm matrix
CðA; BÞ¼ðB; AB; ...; A
n1
BÞ
Controllability is characterized by the following:
Theorem 2 (Kalman controllability theorem). The
linear system [8] is controllable if and only if
rank(C(A, B)) = n.
For linear systems, there exists a duality between
controllability and observability in the sense of the
following theorem:
Theorem 3 Consider the linear control system [8]
and assume to observe the variable z(y) = Cy for
some p n matrix C. Then, observability holds if
and only if the linear system
_
y = A
t
y þ C
t
vis
controllable.
There exists no characterization of controllability
for nonlinear systems as for lin ear ones, but we have
the linearization result:
Theorem 4 A nonlinear system is locally control-
lable if its linearization is. The converse is false.
There are many results for the important class of
control–affine systems
_
y ¼ f
0
ðyÞþ
X
m
i¼1
f
i
ðyÞu
i
½9
where f
0
, ..., f
m
are smooth vector fields on R
n
and
U = R
m
. In general, there exists no explicit represen-
tation for the trajectories of [9], in terms of integrals
of the control as it happens for linear systems. Still, a
rich mathematical theory has been developed apply-
ing techniques and ideas from differential geometry:
the so-called geometric control theory. The main idea
is that controllability (and properties of optimal
trajectories) is determined by the Lie algebra gener-
ated by vector fields f
i
. For example:
Theorem 5 (Lie-algebraic rank condition). Let L
be the Lie algebra generated by the vector fields
f
i
, i = 1, ..., m, and assume f
0
= 0. If L(y) is of
dimension n at every point y then the system is
controllable.
We refer to Agrachev and Sachkov (2004)
and Jurdjevic (1997) for general presentation of
geometric control theory and give a simple example
to show how Lie brackets characterize reachable
directions.
Example 3 Consider the Brockett integrator
_
y
1
¼ u
1
;
_
y
2
¼ u
2
;
_
y
3
¼ u
1
y
2
u
2
y
1
Starting from the origin, using constant controls, we
can move along curves tangent to the y
1
y
2
plane.
However, let f
1
= (1, 0, y
2
) and f
2
= (0, 1, y
1
) (fields
corresponding to constant controls); then their Lie
bracket is given by
½f
1
; f
2
ð0Þ¼ðDf
2
f
1
Df
2
f
2
Þð0Þ¼ð0; 0; 2Þ
Moving for time t first along the integral curve of f
1
,
then of f
2
, then of f
1
, and finally of f
2
, we reach
a point t
2
[f
1
, f
2
](0) þ o(t
2
) along the vertical direc-
tion y
3
. This corre sponds to say that the system
satisfies LARC.
Optimal Control
The theory of optimal control has developed in three
main directions:
Existence of optimal controls, under various
assumptions on L, f , U . When the sets F(t, y)are
convex, optimal solutions can be constructed follow-
ing the direct method of Tonelli for the calculus of
variations, that is, as limits of minimizing sequences:
the two main ingredients are compactness and lower-
semicontinuity. If convexity does not hold, existence
is not granted in general but for special cases.
Necessary conditions for the optimality of a
control u(). The major result in this direction is
the celebrated ‘‘Pontryagin maximum principle’’
(PMP) which extends the Euler–Lagrange equation
to control systems, and the Weierstrass necessary
conditions for a strong local minimum in the
calculus of variations. Various extensions and other
necessary conditions are now available (Agrachev
and Sachkov 2004).
Sufficient conditions for optimality. The standard
procedure resorts to embedding the optimal control
problem in a family of problems, obtained by
638 Control Problems in Mathematical Physics

varying the initial conditions. One defines the value
function V by
Vðt;
yÞ¼inf JðyðÞ; uðÞÞ
where the inf is taken over the set of trajectories and
controls satisfying y(t) =
y. Undersuitable assumptions,
V is the solution to a first-order Hamilton–Jacobian
PDE. The lack of regularity of the value function V has
long provided a major obstacle to a rigorous mathema-
tical analysis, solved by the theory of viscosity solutions
(Bardi and Capuzzo Dolcetta 1997).Anothermethod
consists in building an optimal synthesis, that is, a
collection of trajectory–control pairs.
Pontryagin maximum principle Consider a general
autonomous control system:
_
y ¼ f ð y ; uÞ½10
where y 2 R
n
and u 2 U compact subset of R
m
.We
assume to have regularity of f guaranteeing existence
and uniqueness of trajectories for every u() 2U. For
a fixed T > 0, an optimal control problem in Mayer
form is given by
min
uðÞ2U
ðyðT; uÞÞ; yð0Þ¼
y ½11
where is the final cost and
y the initial condition.
More generally, one can consider also the Lagran-
gian cost
R
L(y, u)dt and reduce to this case by
adding a variable y
0
(0) = 0and
_
y
0
= L.
The well-known PMP provides, under suitable
assumptions, a necessary condition for optimality in
terms of a lift of the candidate optimal trajectory to
the cotangent bundle. For problems as [11], PMP
can be stated as follows:
Theorem 6 Let u
() be a (bounded) admissible
control whose correspondin g trajectory y
() = y(, u
)
is optimal. Call p : [0, T] 7!R
n
the solution of the
adjoint linear equation
_
pðtÞ¼pðtÞD
y
f ðy
ðtÞ; u
ðtÞÞ
pðTÞ¼r ðy
ðTÞÞ
½12
Then the maximality condition
pðtÞf ðy
ðtÞ; u
ðtÞÞ ¼ max
!2U
pðtÞf ðy
ðtÞ;!Þ½13
holds for almost every time t 2 [0, T].
Notice that the conclusion of the theorem can be
interpreted by saying that the pair (y, p) satisfies the
system:
_
y ¼
@Hðy
; p; u
Þ
@p
;
_
p ¼
@Hðy
; p; u
Þ
@y
where H(y, p, u) = hp, f (y, u)i. This is a pseudo–
Hamiltonian system, since H also depends on u
.
Alternatively, one can define the maximized
Hamiltonian
Hðy; pÞ¼max
u
hp; f ðy; uÞi
but H may fail to be smooth. Another difficulty lies
in the fact that an initial condition is given for y and
a final condition is given for .
The proof of PMP relies on a special type of
variations, called needle variations, of a reference
trajectory. Given a candidate optimal control u
and
corresponding trajectory y
, a time of approximate
continuity for f (y
(), u
()) and ! 2 U, a needle
variation is a family of controls u
"
obtained
by replacing u
with ! on the interval [ ", ].
A needle variation gives rise to a variation v of the
trajectory satisfying the variational equation
_
vðtÞ¼D
y
f ðy
ðtÞ; u
ðtÞÞ vðtÞ½14
in classical sense only after time . Recently Piccoli
and Sussmann (2000) introduced a setting in which
needle and other varia tions happen to be
differentiable.
One may also consider some final (or initial)
constraint:
ðT; yðTÞÞ2S ½15
where S R R
n
(and T not fixed). In this case, the
final condition for p is more complicated as well as
the proof of PMP. It is interesting to note the many
connections between PMP and classical mechanics
framework well illustrated by Bloch (2003) and
Jurdjevic (1997).
Value function and HJB equation In this section
we consider the minimization problem
inf
u2U
ðT; yðT; uÞÞ ½16
for the control system
_
y ¼ f ðt; y; uÞ; uðtÞ2U a.e. ½17
subject to the t erminal constraints [15],where
S R
nþ1
is a closed target set.
Theorem 7 (PDE of dynamic programming).
Assume that the value function V, for [15]–[17],
is C
1
on some open set R R
n
, not intersecting
the target set S. Then V satisfies the Hamilton–
Jacobi equation
V
s
ðs; yÞþmin
!2U
V
y
ðs; yÞf ðs; y;!Þ
¼ 0
8ðs; yÞ2
½18
Equation [18] is called the Hamilton–Jacobi–Bellman
(HJB) equation, after Richard Bellman. In general,
Control Problems in Mathematical Physics 639
however, V fails to be differentiable: this is the case for
Example 1 along the lines
. To isolate V as the
unique solution of the HJB equation, one has to resort
to the concept of viscosity solution. The dynamic
programming and HJB equation apparatus applies
also to stochastic problems for which the equation
happens to be parabolic, because of the Ito formula.
Optimal syntheses Roughly speaking, an optimal
synthesis is a collection of optimal trajectories, one
for each initial condition
y. Geometric techniques
provide a systematic method to con struct syntheses:
Step 1 Study the properties of optimal trajectories
via PMP and other necessary conditions.
Step 2 Determine a (finite-dimensional) sufficient
family for optimality, that is, a class of trajectories
(satisfying PMP) containing all possible optimal ones.
Step 3 Construct a synthesis selecting one trajec-
tory for every initial condition in such a way as to
cover the state space in a regular fashion.
Step 4 Prove that the synthesis of Step 3 is indeed
optimal.
One of the main problems in step 2 is the possible
presence of optimal controls with an infinite number
of discontinuities, known as Fuller phenomenon. The
key concept of regular synthesis, of step 3, was
introduced by Boltianskii and recently refined by
Piccoli and Sussmann (2000) to include Fuller phe-
nomena. The above strategy works only in some
special cases, for example for two-dimensional
minimum-time problems (Boscain and Piccoli 2004):
we report below an example.
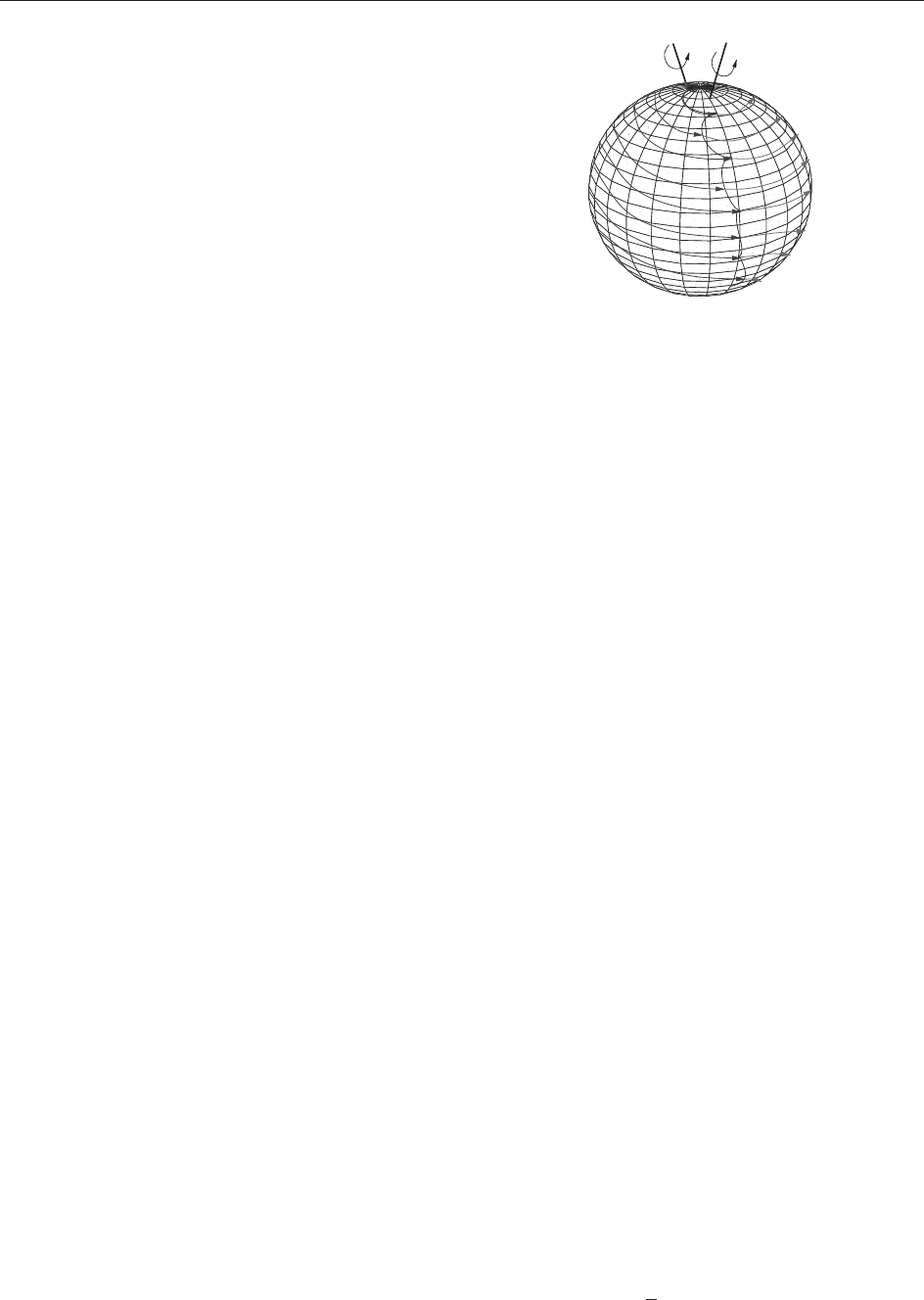
Example 4 Consider the problem of orienting in
minimum time a satellite with two orthogonal rotors:
the speed of one rotor is controlled, while the second
rotor has constant speed. This problem is modelle d by
a left-invariant control system on SO(3):
_
y ¼ yðF þ uGÞ; y 2 SOð3Þ; juj1
where F and G are two matrices of so(3), the Lie
algebra of SO(3). Using the isomorphism of Lie
algebras (SO(3), [. , .]) (R
3
, ), the condition that
the rotors are orthogonal reads: trace(F G) = 0.
If we are interested to orient only a fixed semi-axis
then we project the system on the sphere S
2
:
_
y ¼ yðF þ uGÞ; y 2 S
2
; juj1
In this case, F þ G and F G are rotations around
two fixed axes and, if the angle between these two
axes is less than =2, every optimal trajectory is a
finite concatenation of arcs corresponding to con-
stant control þ1or1. The ‘‘optimal synthesis’’ can
be obtained by the feedback shown in Figure 2.
Control of PDEs
The theory for control of models governed by PDEs
is, as expected, much more ramified and much less
complete. An exhaustive resume of the available
results is not possible in short space, thus we focus
on Example 2 and few others to illustrate some
techniques to treat control problems and give
various references (see also Fursikov and Imanuvilov
(1996), Komornik (1994),andLasiecka and Triggiani
(2000), and references therein).
Besides the variety of control problems illustrated
in the Introduction, for PDE models one can consider
different ways of applying the control, for example:
Boundary control One consider the system [3]
(with F independent of u) and impose the condition
y(t, x) = u(t, x) to hold for every time t and every x in
some region. Usually, we assume y(t) to be defined
bounded region and the control acts on some set
@. Obviously, also Neumann conditions are
natural as @
y = u where is the exterior normal to .
Internal control One consider the system [3]
with F depending on u. Thus, the control acts on the
equation directly.
Other controls There are various other control
problems one may consider as Galerkin-type
approximation and control of some finite family of
modes. An interesting example is given by Coron
(2002), where the position of a tank is controlled to
regulate the water level inside.
Control of a Vibrating String
We consider Example 2 , but various results hold for
hyperbolic linear systems in general. First consider
the uncontrolled system
z
tt
¼ z; zð0; tÞ¼zð1; tÞ¼0 ½19
A first integral is the energy given by
EðtÞ¼
1
2
Z
jz
x
j
2
þjz
t
j
2
hi
dx
u = +1
u
= –1
F – G
F
+ G
Figure 2 Optimal feedback for Example 4.
640 Control Problems in Mathematical Physics

Then we say that the system [19] is observable at
time T if there exists C(T) such that
Eð0ÞCðTÞ
Z
T
0
jz
x
ð1; tÞj
2
dt
which means that if we observe zero displacement
on the right end for time T then the solution has
zero energy and hence vanishes. In this case, the
system is observable for every time T 2: this is
precisely the time taken by a wave to travel from the
right end point to the left one and backward.
Thanks to a duality as for the finite-dimensional
case, observability of [19] is equivalent to null
controllability for [5]–[7], that is, to the property
that for every initial con ditions y
0
, y
1
there exists a
control u() such that the corresponding solution
verifies y(x, T) = y
t
(x, T) = 0. More precisely, the
desired control is given by u(t) =
~
z
x
(1, t), where
~
z is
the solution of [19] minimizing the functional (over
L
2
H
1
)
Jðzð;0Þ;z
t
ð;0ÞÞ
¼
1
2
Z
T
0
jz
x
ð1;tÞj
2
dt þ
Z
y
0
z
t
ð;0Þdx
Z
y
1
zð;0Þd x
One can check that this functional is continuous and
convex, and the coercivity is granted by the
observability of [19]; thus, a minimum exists by
the direct method of Tonelli. This is an example of
the method known as Hilbert’s uniqueness method
introduced by Lions (1988).
In the multidimensional case, controllability can
be characterized by imposing a condition on the
region @ on which the control acts. More
precisely, rays of geometric optics in should
intersect (Zuazua 2005).
If we consider infinite-time horizon T = þ1 and
introduce the functional
J ¼
Z
þ1
0
kyk
2
dt þ N
Z
u
2
dt dx
then the optimal control is determined as follows.
If (y, p) is a solution of the optimality system:
[5]–[6] with y = 0 outside and
p
tt
p þ y ¼ 0;@
p þ Ny ¼ 0on
p ¼ 0on@
then u = y on (Lions 1988, Zuazua 2005).
Controllability via Return Method of Coron
As we saw in Theorem 4, a nonlinear system may be
controllable even if its linearization is not. In this
case, controllability can be proved by the return
method of Coron, which consists in finding a
trajectory y such that the following hold:
1. y(0) = y(T) = 0;
2. the linearized system around y is controllable.
Then by implicit-function theorem, local controll-
ability is granted, that is, there exit s ">0 such that
for every data y
0
, y
1
of nor m less than ", there exists
a control steering the system from y
0
to y
1
in time T.
This method does not give many advantages in the
finite-dimensional case, but permits to obtain excel-
lent results for PDE systems such as Euler, Navier–
Stokes, Saint–Venant, and others ( Coron 2002).
Control of Schro¨ dinger Equation
Consider the issue of designing an efficient transfer of
population between different atomic or molecular
levels using laser pulses. The mathematical descrip-
tion consists in controlling the Schro¨ dinger equation.
Many results are available in the finite-dimensional
case. Finite-dimensional closed quantum systems are
in fact left-invariant control systems on SU(n), or on
the corresponding Hilbert sphere S
2n1
C
n
, where
n is the number of atomic or molecular levels, and
powerful techniques of geometric control are avail-
able both for what concerns controllability and
optimal control (Agrachev and Sachkov 2004,
Boscain and Piccoli 2004, Jurdjevic 1997).
Recent papers consider the minimum-time pro-
blem with unbounded controls as well as minimiza-
tion of the energy of transition. Boscain et al. (2002)
have applied the techniques of sub-Riemannian geo-
metry on Lie groups and of optimal synthesis on two-
dimensional manifolds to the population transfer
problem in a three-level quantum system driven by
two external fields of arbitrary shape and frequency.
Although many results are available for finite-
dimensional systems, only few controllability prop-
erties have been proved for the Schro¨ dinger equation
as a PDE, and in particular no satisfactory global
controllability results are available at the moment.
Further Reading
Agrachev A and Sachkov Y (2004) Control from a Geometric
Perspective. Springer.
Bardi M and Capuzzo Dolcetta I (1997) Optimal Control and
Viscosity Solutions of Hamilton–Jacobi–Bellman Equations.
Boston: Birkhauser.
Bloch AM (2003) Nonholonomic Mechanics and Control, with
the collaboration of J. Baillieul, P. Crouch and J. Marsden,
with scientific input from P. S. Krishnaprasad, R. M. Murray
and D. Zenkov. New York: Springer.
Boscain U and Piccoli B (2004) Optimal Synthesis for Control
Systems on 2-D Manifolds. Springer SMAI, vol. 43. Heidelberg:
Springer.
Control Problems in Mathematical Physics 641

Boscain U, Chambrion T, and Gauthier J-P (2002) On the K þ P
problem for a three-level quantum system: optimality implies
resonance. Journal of Dynamical and Control Systems
8: 547–572.
Bullo F and Lewis AD (2005) Geometric Control of Mechanical
Systems. New York: Springer.
Coron JM (2002) Return method: some application to flow
control. Mathematical Control Theory, Part 1, 2 (Trieste,
2001). In: Agrachev A (ed.) ICTP Lecture Notes, vol. VIII.
Trieste: Abdus Salam Int. Cent. Theoret. Phys.
Fursikov AV and Imanuvilov O Yu (1996) Controllability of
Evolution Equations. Lecture Notes Series, vol. 34. Seoul:
Seoul National University.
Jurdjevic V (1997) Geometric Control Theory. Cambridge:
Cambridge University Press.
Komornik V (1994) Exact Controllability and Stabilization. The
Multiplier Method. Chichester: Wiley.
Lasiecka I and Triggiani R (2000) Control theory for Partial
Differential Equations: Continuous and Approximation The-
ories. Cambridge: Cambridge University Press.
Lions JL (1988) Exact controllability, stabilization and perturba-
tions for distributed systems. SIAM Review 30: 1–68.
Piccoli B and Sussmann HJ (2000) Regular synthesis and
sufficiency conditions for optimality. SIAM Journal of Control
Optimization 39: 359–410.
Sontag ED (1998) Mathematical Control Theory. New York:
Springer.
Zuazua E (2005) Propagation, observation and conrol of wave
approximatex by finite difference methods. SIAM Review
47: 197–243.
Convex Analysis and Duality Methods
G Bouchitte´ , Universite
´
de Toulon et du Var,
La Garde, France
ª 2006 Elsevier Ltd. All rights reserved.
Introduction
Convexity is an important notion in nonlinear
optimization theory as well as in infinite-
dimensional functional analysis . As will be seen
below, very simple and powerful tools will be
derived from elementary duality arguments (which
are by-products of the Mo reau–Fenchel transform
and Hahn–Banach theorem). We will emphasize on
applications to a large range of variational pro-
blems. Some arguments of measure theory will be
skipped.
Basic Convex Analysis
In the following, we denote by X a normed vector
space, and by X
the topological dual of X.If
a topology different from the normed topology is
used on X, we will denote it by . For every x 2 X
and A X, V
x
denotes the open neighborhoods of x
and int A,clA, respectively, the interior and the
closure of A. We deal with extended real-valued
functions f : X !R [ {þ1}. We denote by dom f =
f
1
(R) and by epi f = {(x, ) 2 X R: f (x) }
the domain and the epigraph of f, respectively. We
say that f is proper if dom f 6¼;. Recall that f is
convex if for every (x, y) 2 X
2
and t 2 [0, 1], there
holds
f ðtx þð1 tÞyÞtf ðxÞþð1 tÞf ðyÞ
ðby convention 1þa ¼ þ1Þ
The notion of convexity for a subset A X
is recovered by saying that
A
is convex, where its
indicator function
A
is defined by setting
A
ðxÞ¼
0ifx 2 A
þ1 otherwise
Continuity and Lower-Semicontinuity
A first consequence of the convexity is the continuity
on the topological interior of the domain. We refer for
instance to Borwein and Lewis (2000) for a proof of
Theorem 1 Let f : X !R [ {þ1} be convex and
proper. Assume that sup
U
f < þ1, where U is a
suitable open subset of X. Then f is continuous and
locally Lipschitzian on all int(do m f ).
As an immediate corollary, a convex function on
a normed space is continuous pro vided it is
majorized by a locally bounded function. In the
finite-dimensional case, it is easily deduced that a
finite-valued convex function f : R
d
!R is locally
Lipschitz. Furthermore, by Aleksandrov’s theorem,
f is almost everywhere twice differentiable and the
non-negative Hessian matrix r
2
f coincides with the
absolutely continuous part of the distribu tional
Hessian matrix D
2
f (it is a Radon measure taking
values in the non-negative symmetric matrices).
However, in infinite-dimensional spaces, for
ensuring compactness properties (as, e.g., in condi-
tion (ii) of Theorem 4 below), we need to use weak
topologies and the situation is not so simple.
A major idea consists in substituting the continuity
property with lower-semicontinuity.
Definition 2 A function f : X !R [ {þ1}is-l.s.c.
at x
0
2 X if for all 2 R, there exists U 2V
x
0
such that f >on U. In particular, f will be l.s.c. on
all X provided f
1
((r, þ1)) is open for every r 2 R.
642 Convex Analysis and Duality Methods
Remark 3
(i) The following sequential notion can be also
used: f is -sequentially l.s.c. at x
0
if
8ðx
n
ÞXx
n
!
x
0
¼) lim inf
n!þ1
f ðx
n
Þf ðx
0
Þ
It turns out that this notion (weaker in general)
is equivalent to the previous one provided x
0
admits a countable basis of neighborhoods.
(ii) A well-known consequence of Hahn–Banach
theorem is that, for convex functions, the lower-
semicontinuity property with respect to the
normed topology of X is equivalent to the weak
(or weak sequential) lower-semicontinuity.
Theorem 4 (Existence). Let f : X !R [ {þ1} be
proper, such that
(i) fis-l.s.c.,
(ii) 8r 2 R, f
1
((1, r ]) is -relatively compact.
Then there is
x 2 X such that f (
x) = inf fand
argmin f := {x 2 Xjf (x) = inf f } is -compact.
In practice, the choice of the topology is ruled
by the condition (ii) above. For example, if X is a
reflexive infinite-dimensional Banach space and if f
is coercive (i.e., lim
kxk!1
f (x) = þ1), we may take
for the weak topology (but never the normed
topology). This restriction implies in practice that
the first condition in Theorem 4 may fail. In this
case, it is often useful to substitute f with its lower-
semicontinuous (l.s.c.) envelope.
Definition 5 Given a topology , the relaxed function
f (=
f
) is defined as
f ðxÞ¼supfgðxÞjg : X !R [ fþ1g;
g is -l:s:c:; g f g
It is easy to check that f is -l.s.c. at x
0
if and only
if
f (x
0
) = f ( x
0
). Futhermore,
f ðxÞ¼sup
U2V
u
inf
U
f ; epi
f ¼ cl
ðXRÞ
ðepi f Þ
We can now state the relaxed version of Theorem 1.4.
Theorem 6 (Relaxation). Let f : X !R [ {þ1},
then:inff = inf
f . Assume further that, for all
real r, f
1
((1, r ]) is T -relatively compact; then f
attains its minimum and argminf =argmin
f \
{x2Xjf (x)=
f (x)}.
Moreau–Fenchel Conjugate
The duality between X and X
will be denoted by the
symbol hji.IfX is a Euclidian space, we identify X
with X via the scalar product denoted (j).
Definition 7 Let f : X !R [ {þ1}. The Moreau–
Fenchel conjugate f
: X
!R [ {þ1}off is de fined
by setting, for every x
2 X
:
f
ðx
Þ¼supfhxjx
if ðxÞjx 2 Xg
In a symmetric way, if f
is proper on X
, we define
the biconjugate f
: X !R [ {þ1} by setting
f
ðxÞ¼supfhxjx
if
ðx
Þjx
2 X
g
As a consequence, the so-called Fenchel inequality
holds:
hxjx
if ðxÞþf
ðx
Þ; ðx; x
Þ2X X
Notice that f does not need to be con vex. However,
if f is convex, then f
agrees with the Legendre–
Fenchel transform.
Definition 8 Let f : X !R [ {þ1}. The sub-
differential of f at x is the possibly void subset of
@f (x) X
defined by
@f ðxÞ: ¼fx
2 X
: f ðxÞþf
ðx
Þ¼hx; x
ig
It is easy to check that @f (x) is convex and weak-
star closed. Moreover, if f is convex and has a
differential (or Gateaux derivative) f
0
(x)atx, then
@f (x) = {f
0
(x)}. After summarizing some elementary
properties of the Fenchel transform, we give
examples in R
d
or in infinite-dimensional spaces.
Lemma 9
(i) f
is convex, l.s.c. with respect to the weak star
topology of X
.
(ii) f
(0) = inf fandf g ) f
g
.
(iii) (inf
i
f
i
)
= sup
i
f
i
, for every family {f
i
}.
(iv) f
(x) = sup{g(x): g affine continuous on X and
g f }(by convention, the supremum is identi-
cally 1 if no such g exists).
Proof (i) This assertion is a direct consequence of the
fact that f
can be written as the supremum
of functions g
x
,whereg
x
:= hx jif (x). Clearly,
these functions are affine and weakly star-continuous
on X
. The assertions (ii), (iii) are trivial. To obtain (iv),
it is enough to observe that an affine function g of
the form g(x) = hx, x
i satisfies g f iff
f
(x
) . &
Example 1 Let f : X !R, be defined by
f ðxÞ¼
1
p
kxk
p
X
; 1 < p < þ1
then,
f
ðx
Þ¼
1
p
0
kx
k
p
0
X
; with
1
p
þ
1
p
0
¼ 1
Convex Analysis and Duality Methods 643
whereas, for p = 1, we find f
=
B
, where
B
= {kx
k1}.
Example 2 Let A 2 R
d
2
sym
be a symmetric positive-
definite matrix and let f (x):= (1=2)(Ax jx )(x 2 R
d
).
Then, for all y 2 R
d
, we have f
(y) = (1=2)(A
1
y jy).
Notice that if A has a negative eigenvalue, then
f
þ1.
Particular examples on R
d
are also very popular.
For instance:
Minimal surfaces
f ðxÞ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
1 þjxj
2
q
f
ðyÞ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
1 jyj
2
q
if jyj1
þ1 otherwise
(
Entropy
f ðxÞ¼
x log x if x 2 R
þ
þ1 otherwise
; f
ðyÞ¼expðy 1Þ
Example 3 Let C X be convex, and let f =
C
.
Then,
f
ðx
Þ¼
C
ðc
Þ¼sup
x2C
hxjx
i
ðsupport function of CÞ
Notice that if M is a subspace of X, then
(
M
)
=
M
?
. We specify now a particular case of
interest.
Let be a bounded open subset of R
n
.Take
X = C
0
(
; R
d
) to be the Banach space of continu-
ous functions on the compact
) with values in R
d
.
As usual, we identify the dual X
with the space
M
b
(
; R
d
)ofR
d
-valued Borel measures on
with
finite total variation. Le t K be a close d c onvex of
R
d
such that 0 2 K.Then
0
K
():= sup{( jz): z 2 K}
is a non-negative convex l.s.c. and positively
1-homogeneous function on R
d
(e.g.,
K
is the
Euclidean norm if K is the unit ball of R
d
). Let us
define C := {’ 2 X: ’(x) 2 K, 8x 2 }. Then, we
have
ð
C
Þ
ðÞ¼
Z
0
K
ðÞ
:¼
Z
0
K
d
d
ðdxÞ½1
where is any non-negative Radon measure such
that (the choice of is indifferent). In the case
where K is the unit ball, we recover the total
variation of .
Example 4 (Integral functionals). Given 1 p <
þ1,(, , T ) a measured space and ’ :
R
d
![0, þ1]aTB
R
d
-measurable integrand.
Then the partial conjugate ’
(x, z
):= sup{hz jz
i
’(x, z): z 2 R
d
} is a convex measurable integrand.
Let us define
I
’
: u 2ðL
p
Þ
d
!
Z
’ðx; uð xÞÞd 2 R [ fþ1g
and assume that I
’
is proper. Then there holds
(I
’
)
= I
’
, where
ðI
’
Þ
: v 2ðL
p
0
Þ
d
!
Z
’
ðx; vðxÞÞd
Duality Arguments
Two Key Results
The first result related to the biconjugate f
is
a consequence of the Hahn–Banach theorem.
Recalling the assertion (v) of Lemma 9, we notice
that the existence of an affine minorant for f is
equivalent to the properness of f
(i.e.,
9x
0
2 X
: f
(x
0
) < þ1).
Theorem 10 Let f : X !R [ {þ1} be convex and
proper. Then
(i) f is l.s.c. at x
0
if and only if f
is proper
and f
(x
0
) = f ( x
0
). In particular, the lower-
semicontinuity of f on all X is equiva lent to the
identity f f
.
(ii) If f
is proper, then f
=
f .
Proof We notice that by Lemma 9, f
f and f
is l.s.c (even for the weak topology). Therefore,
f
f and, moreover, f is l.s.c. at x
0
if f
(x
0
)
f (x
0
). Conversely, if f is l.s.c. at x
0
, for every
0
<
f (x
0
), there exists a neighborhood V of x
0
such
that V (1,
0
) \ epi f = ;. It follows that
epi f is a proper closed convex subset of X R
which does not intersect the compact singleton
{(x
0
,
0
)}. By applying the Hahn–Banach strict
separation theorem, there exists (x
0
,
0
) 2 X
R
such that
hx
0
; x
0
iþ
0
0
< hx; x
0
iþ
0
for all ðx;Þ2epi f
Taking !1 and x 2 dom f , we find
0
0. In
fact,
0
> 0 as the strict inequality above would be
violated for x = x
0
. Eventually, we obtain that f is
minorized by the affine continuous function
g(x) = hx x
0
, x
0
=iþ
0
. Thus, we conclude
that f
is proper and that f
(x
0
)
0
.
The assertion (ii) is a direct consequenc e of the
equivalence in (i).
&
644 Convex Analysis and Duality Methods