Griffiths D.F., Higham D.J. Numerical Methods for Ordinary Differential Equations: Initial Value Problems
Подождите немного. Документ загружается.

186 13. Modified Equations
3. Should the values of u and v be required at time t = t
n+1
:
u
n+1
= u
n+
1
2
−
1
2
hv
n+1
.
Thus, v is computed at integer nodes and u at half-integer nodes.
For the purposes of analysis, all half-integer values are eliminated from
(13.18), so the update from u
n
, v
n
to u
n+1
, v
n+1
may be written as
u
n+1
v
n+1
=
u
n
v
n
+ h
−v
n
u
n
−
1
2
h
2
u
n
v
n
+
1
4
h
3
v
n
0
. (13.22)
Before embarking on the construction of modified equations we check the
LTE of the method. The original ODE system is expressed in matrix-vector
form as
u
0
(t) = Au(t), A =
0 −1
1 0
and we observe that A
2
= −I, A
3
= −A so that
u
00
(t) = Au
0
(t) = A
2
u(t) = −u(t), u
000
(t) = −u
0
(t) = −Au(t).
The Taylor expansion
u(t + h) = u(t) + hu
0
(t) +
1
2
h
2
u
00
(t) +
1
3!
h
3
u
000
(t) + O(h
4
)
therefore becomes
u(t + h) =
I + hA −
1
2
h
2
I −
1
3!
h
3
A
u(t) + O(h
4
).
Equation (13.22) can be written in matrix-vector form as
u
n+1
=
I + hA −
1
2
h
2
I +
1
4
h
3
0 1
0 0
u
n
,
so, under the localizing assumption u
n
= u(t
n
), we have
u(t
n+1
) − u
n+1
= O(h
3
),
showing that the St¨ormer–Verlet method is consistent of order 2.
We next seek a matrix B so that the numerical solution is consistent of
order three with the modified system
x
0
(t) = (A + h
2
B)x(t). (13.23)
It follows by successive differentiation that
x
00
(t) = (A + h
2
B)x
0
(t) = (A + h
2
B)
2
x(t) + O(h
4
)
= A
2
x(t) + O(h
2
) = −x(t) + O(h
2
)
13.3 A Two-Step Method 187
and x
000
(t) = −Ax(t) + O(h
2
). Using these in the Taylor expansion of x(t + h)
we find
x(t + h) = x(t) + hx
0
(t) +
1
2
h
2
x
00
(t) +
1
3!
h
3
x
000
(t) + O(h
4
)
= x(t) + h(A + h
2
B)x(t)
−
1
2
h
2
− x(t) −
1
3!
h
3
Ax(t) + O(h
4
)
=
h
I + hA −
1
2
h
2
I − h
3
(
1
3!
A + B)
i
x(t) + O(h
4
).
Now, under the localizing assumption that u
n
= x(t
n
), we find
x(t
n+1
) − u
n+1
= h
3
−
1
3!
A + B −
1
4
0 1
0 0
x(t
n
) + O(h
4
).
The right-hand side will be of fourth order if
B =
1
3!
A +
1
4
0 1
0 0
=
1
12
0 −1
2 0
.
The St¨ormer–Verlet method is, therefore, consistent of order three with the
modified system (13.23). It then follows (see Exercise 13.10) that the compo-
nents of x(t) lie on the ellipse
(1 +
1
6
h
2
)x
2
(t) + (1 +
1
12
h
2
)y
2
(t) = constant (13.24)
and, from the initial conditions, the constant = 1 +
1
6
h
2
. This is shown as a
dashed curve in Figure 13.3 (right) when h = 1/3 and is virtually indistinguish-
able from the circle on which the exact solution u(t) lies.
It was shown in Example 7.6 that the solutions of the trapezoidal rule
lie on precisely the same circle as the exact solution of the IVP. This would
appear to give it an advantage over the symplectic Euler method (13.18) and
the St¨ormer–Verlet method (13.21). However, counting against the trapezoidal
rule are the facts that (a) it is implicit and, therefore computationally expensive
in a nonlinear context, and (b) the exact “conservation of energy” property does
not generalize to nonlinear problems as it does for the other methods.
13.3 A Two-Step Method
The e xamples thus far have sought to find a modified equation with which the
method has a higher order of consistency than with the original ODE. Our final
example has a different nature and shows that a method applied to a scalar
problem may also be a consistent approximation of a system.

188 13. Modified Equations
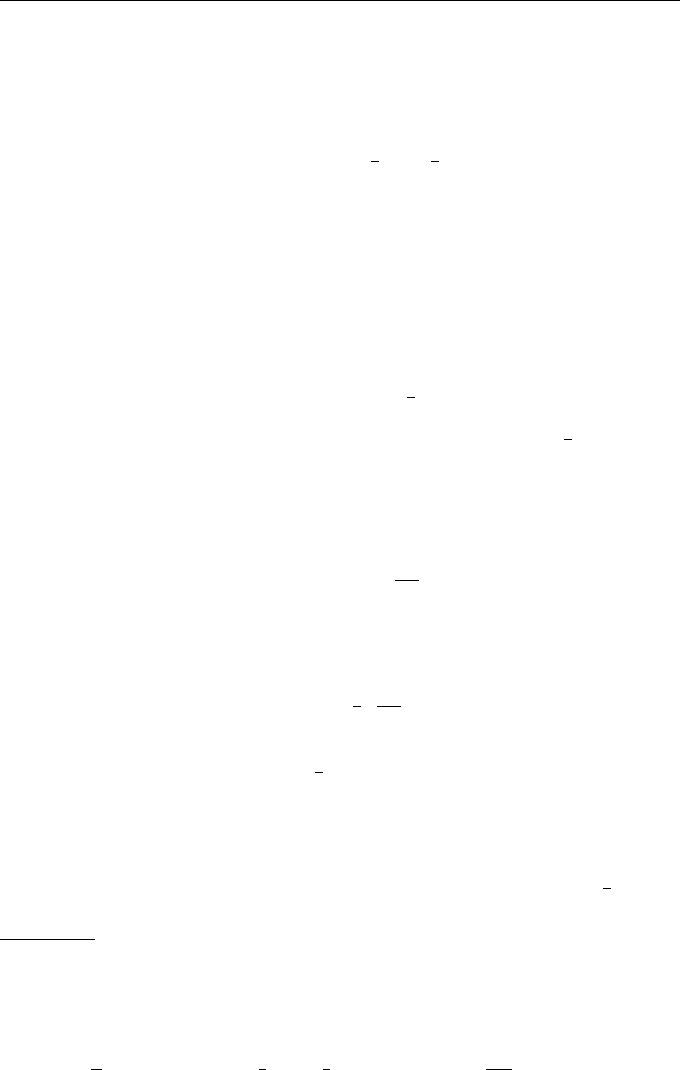
Example 13.6 (The Mid-Point Rule)
Derive a modified system of equations that can be used to explain the behaviour
of the mid-point rule (see Example 6.12) when it is used to solve the IVP
u
0
(t) = u(t) − u
2
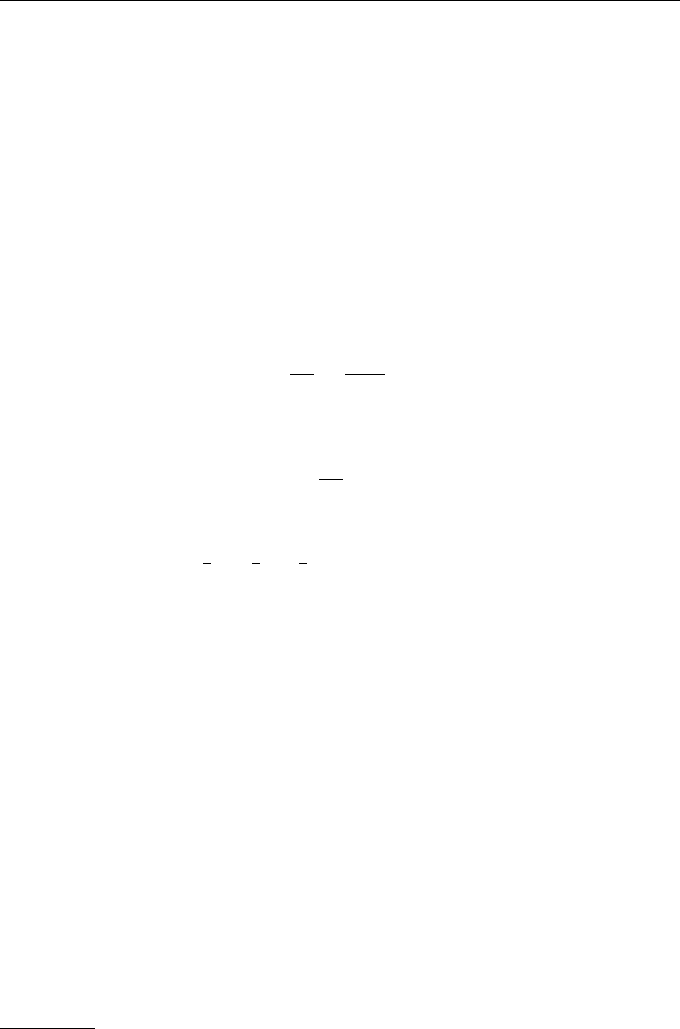
(t), u(0) = 0.1. The numerical solution with h = 0.1 is shown
in Figure 13.4 (left) and is seen to have periodic bursts of activity while the
exact solution is effectively constant for t > 5.
The mid-point rule applied to the given ODE leads to the nonlinear differ-
ence equation
u
n+2
− u
n
= 2hu
n+1
(1 − u
n+1
) (13.25)
with u
0
= 0.1 and we assume that the second initial condition is obtained via
Euler’s method:
u
1
= u
0
+ hu
0
(1 − u
0
).
We observe in Figure 13.4 (left) that the numerical solution (dots) is indis-
tinguishable from the exact solution (solid curve) up until about t = 5, after
which consecutive values of u
n
oscillate around the steady state u = 1. This
suggests that we treat the even- and odd-numbered values of u
n
differently. We
shall suppose that, u
n
≈ x(t
n
) for even values of n and that u
n
≈ y(t
n
) for odd
values of n, where the smooth functions x(t) and y(t) will be the solutions of
a (yet to be determined) modified system of ODEs.
The LTE will be different depending on the parity of n:
T
n+2
=
(
x(t
n+2
) − x(t
n
) − 2hy(t
n+1
)
1 − y(t
n+1
)
, when n is even,
y(t
n+2
) − y(t
n
) − 2hx(t
n+1
)
1 − x(t
n+1
)
, when n is odd,
(13.26)
0 10 20 30 40 50
−1
−0.5
0
0.5
1
1.5
2
t
n
u
n
−0.5 0 0.5 1 1.5
−0.5
0
0.5
1
1.5
x
y
A
O
C
1
C
2
Fig. 13.4 Left: numerical solutions for Example 13.6 with h = 0.1 (dots) and
the exact solution u(t) (solid curve). Right: the numerical solution (dots) is
seen to lie on one of the family (13.28) of ellipses in phase space
13.3 A Two-Step Method 189
and Taylor expansion
3
leads to
T
n+2
=
(
2h
x
0
(t
n+1
) − y(t
n+1
)
1 − y(t
n+1
)
+ O(h
3
), when n is even,
2h
y
0
(t
n+1
) − x(t
n+1
)
1 − x(t
n+1
)
+ O(h
3
), when n is odd.
This suggests that the method, which is a one-step map from (u
n
, u
n+1
) to
(u
n+1
, u
n+2
), is consistent of order 2 with the system
x
0
(t) = y(t) − y
2
(t)
y
0
(t) = x(t) − x
2
(t)
)
. (13.27)
In contrast to the previous examples this system does not have h-dependent
coefficients. Since
dy
dx
=
y
0
(t)
x
0
(t)
,
we deduce that y, regarded as a function of x, satisfies the separable differential
equation
(y(t) − y
2
(t))
dy
dx
= x(t) − x
2
(t).
This can be integrated to give (following factorization)
(x − y)
1
2
x +
1
2
y −
1
3
(x
2
+ xy + y
2
)
= constant. (13.28)
These curves are shown in Figure 13.4 (right) with values −0.15, −0.1, . . . , 0.15
for the constant. Superimp ose d are the points (u
2m
, u
2m−1
) showing even- ver-
sus odd-numbered values of the solution sequence. The dots leading directly
from the origin O to the point marked A(1, 1) correspond to the smooth part
of the trajectory up to about t = 5. On OA we have x = y, which implies
that x = y = u, and so even- and odd-numbered points both approximate the
original solution u(t).
When the solution approaches the steady state we can substitute u(t) =
1 − εv(t) into u
0
(t) = u(t) − u
2
(t) to give v
0
(t) = −v(t) + εv
2
(t). When ε is
small, u(t) is close to 1 and the linearized equation
4
v
0
(t) = −v(t) indicates
that the solution is attracted to v = 0, that is u = 1, exponentially in time.
However, it was shown in Example 6.12 that the mid-point rule cannot be
absolutely stable for any h > 0. It is this loss of (weak) stability that causes
the oscillatory b e haviour—corresponding to a trajectory moving in a closed
semi-elliptic path in the phase plane. The long-term behaviour of the system
(13.27) is the subject of Exercise 12.1.
3
It is more efficient here to Taylor expand each of the quantities x(t
n+2
), x(t
n
),
y(t
n+2
), y(t
n
) about t = t
n+1
because this avoids having to expand the nonlinear
terms.
4
See Section 12.1 on Long Term Dynamics.
190 13. Modified Equations
How can this behaviour be rec onciled with the fact that, because the mid-
point rule is zero-stable and a consistent method of order 2 to the original
ODE, its solutions must converge to u(t), the solution of u
0
(t) = u(t) − u
2
(t),
u(0) = 0.1? In the phase plane it takes an infinite time for the exact solution
of the ODEs to reach the point A and convergence of a numerical method is
only guaranteed for finite time intervals [0, t
f
]. Moreover, as h → 0, the time at
which the instability sets in tends to infinity and so the motion on any interval
[0, t
f
] is ultimately free of oscillations.
13.4 Postscript
In cases where the modified equations are differential equations with h-dependent
coefficients they should tend towards the original differential equations as
h → 0. This provides a basic check on derived modified equations. See the
article by Griffiths and Sanz-Serna [24] for further examples of modified equa-
tions for both ordinary and partial differential equations in a relatively simple
setting.
Modified equations are related to the idea of “backward error analysis”
in linear algebra that was developed around 1950 (see N.J. Higham [36, Sec-
tion 1.5]). The motivating idea is that instead of regarding our computed values
as an approximate solution to the given problem, we may regard them as an
exact solution to a nearby problem. We may then try to quantify the concept
of “nearby” and study whether the nearby problem inherits properties of the
given problem. In our context, the nearby problem arises by adding small terms
to the right-hand side of the ODE. An alternative would be to allow the initial
conditions to be perturbed, which leads to the concept of shadowing. This has
been extensively studied in the context of dynamical systems (see, for example,
Chow and Vleck [8]).
EXERCISES
13.1.
?
For Example 13.1, amend the proof of Theorem 2.4 to prove that
ˆe
n
= O(h
2
) (Hint: it is only necessary to take account of the fact
that |
b
T
j
| ≤ Ch
3
.)
13.2.
??
Show that the LTE (13.3) is of order O(h
3
) when y(t) is the solution
of the alternative modified Equation (13.8). Hence, conclude that x
n
is a second-order approximation to y(t
n
). Show that the arguments
based on (13.6) ab out the overdamping eff ec ts of Euler’s method
Exercises 191
could also be deduced from (13.8).
13.3.
??
Show that the LTE (13.3) is of order O(h
3
) when y(t) is the solution
of the modified equation y
0
(t) = µy(t), where
5
µ = λ
1 −
1
2
λh +
1
3
λ
2
h
2
.
Hence, conclude that x
n
is a third-order approximation to y(t
n
).
13.4.
??
Consider the backward Euler method (1 − λh)x
n+1
= x
n
applied
to the ODE x
0
(t) = λx(t). Show that the LTE is given by
b
T
n+1
= y(t
n
+ h) − (1 − λh)
−1
y(t
n
)
and is of order O(h
3
) when y(t) satisfies the second-order ODE
y
0
(t) = λ(1 +
1
2
λh)y(t).
Deduce that |y(t)| > |x(t)| for t > 0 when 0 < 1 +
1
2
λh < 1 and
y(0) = x(0).
13.5.
??
Consider the backward Euler method x
n+1
= x
n
+ hf
n+1
applied
to the ODE x
0
(t) = f (x(t)). By writing x
n+1
= x
n
+ δ
n
, show that
f(x
n+1
) = f (x
n
) + h
df
dx
(x
n
)δ
n
+ O(h
2
).
Use this, together with the expansion (13.4) and the localizing as-
sumption, to deduce the modified equation
y
0
(t) =
1 +
1
2
h
df
dy
(y(t))
f(y(t)). (13.29)
13.6.
??
Show that y
0
(t) = A(I −
1
2
hA)y(t) is a modified equation for Euler’s
method applied to the linear syste m of ODEs x
0
(t) = Ax(t), where
x, y ∈ R
m
and A is an m × m matrix.
Identify an appropriate matrix A for the ODEs in Example 13.3 and
verify that the “modified matrix” in (13.16) is
b
A = A(I −
1
2
hA).
5
An alternative way of finding suitable values of µ is to substitute y(t) = e
µt
into
(13.3) to give
b
T
n+1
= e
µt
n
`
e
µh
− 1 − λh
´
. Hence,
b
T
n+1
= O(h
p+1
) if µ is chosen so
that e
µh
= 1 + λh + O(h
p+1
). Thus, µ can be obtained by truncating the Maclaurin
series expansion of
µ =
1
h
log(1 + λh) = λ −
1
2
λ
2
h +
1
3
λ
3
h
2
+ ··· + (−1)
p
1
p+1
λ
p+1
h
p
+ ··· .
192 13. Modified Equations
13.7.
???
Use the modified system derived in the previous ques tion to discuss
the behaviour of Euler’s method applied to x
0
(t) = Ax(t), when
x(t
0
) is an eigenvector of A, in the cases where the matrix A is (a)
positive definite, (b) negative definite, and (c) skew-symmetric.
13.8.
?
Use the identity
d
dt
x
2
(t) + y
2
(t)
= 2x(t)x
0
(t) + 2y(t)y
0
(t)
together with the ODEs (13.15) to prove that
d
dt
x
2
(t) + y
2
(t)
= h
x
2
(t) + y
2
(t)
,
which is a first-order constant-coefficient linear differential equation
in the dependent variable w(t) = x
2
(t) + y
2
(t). Hence, prove that
x(t) and y(t) satisfy Equation (13.17).
13.9.
??
Complete the details leading up to (13.19).
Show that
d
dt
x
2
(t) − hx(t)y(t) + y
2
(t)
= 0
and, hence, deduce that Equation (13.20) holds.
13.10.
?
Deduce that the solutions of the modified system derived in Exam-
ple 13.5 lie on the family of ellipses (13.24).
13.11.
???
Show that the nonlinear oscillator u
00
(t) + f(u) = 0 (cf. Exer-
cise 7.6) is equivalent to the first-order system
u
0
(t) = −v(t), v
0
(t) = f (u(t)). (13.30)
Supp ose that F (u) is such that f (u) =
dF (u)
du
. Show that the solu-
tions of this system satisfy
d
dt
2F (u(t)) + v
2
(t)
= 0
and, therefore, lie on the family of curves v
2
(t)+2F (u(t)) = constant.
The system (13.30) may be solved numerically by a generalization
of the method in Example 13.4:
u
n+1
= u
n
− hv
n
, v
n+1
= v
n
+ hf (u
n+1
), n = 0, 1, . . . ,
with u
0
= 1 and v
0
= 0. Derive the modified system
x
0
(t) = −y(t) +
1
2
hf(x(t))
y
0
(t) = f(x(t)) −
1
2
h
df
dx
(x(t))y(t)
.

Exercises 193
Deduce that
d
dt
2F (x(t)) − hf(x(t))y(t) + y
2
(t)
= 0
and hence that solutions lie on the family of curves
2F (x(t)) − hf(x(t))y(t) + y
2
(t) = constant
in the x-y phase plane. Verify that these results coincide with those
of Example 13.4 when f(u) = u.
13.12.
???
It follows from Exercise 11.3 that the TS(1) method of Exam-
ple 11.2 applied to the IVPx
0
(t) = −λx(t), x(0) = 1, leads to
x
n+1
= (1 − h
n
λ)x
n
, t
n+1
= t
n
+ h
n
,
h
n
=
2 tol
λ
2
x
n
1/2
, t
0
= 0, x
0
= 1,
(13.31)
on the assumption that no steps are rejected. Suppose that (t
n
, x
n
)
denotes an approximation to a point on the parameterized curve
(t(s), x(s)) at s = s
n
, where s
n
= n∆s and ∆s =
√
2tol is a constant
step size in s. Assuming that λ > 0, show that the equations (13.31)
are a consistent approximation of the IVP
d
ds
x(s) = −λg(s)x(s),
d
ds
t(s) = g(s),
with x(0) = 1, t(0) = 0, and g(s) = 1/(λ
p
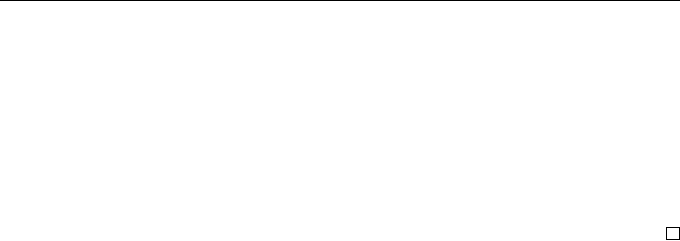
x(s)).
Solve these ODEs for x(s) and t(s) and verify that the expected
solution is obtained when the parameter s is eliminated. Show that
x(s) = 0 for s = 2 regardless of the value of λ. Deduce that the
numerical solution x
n
is expected to reach the fixed point x = 0
in approximately
p
2/tol time steps. Sample numerical results are
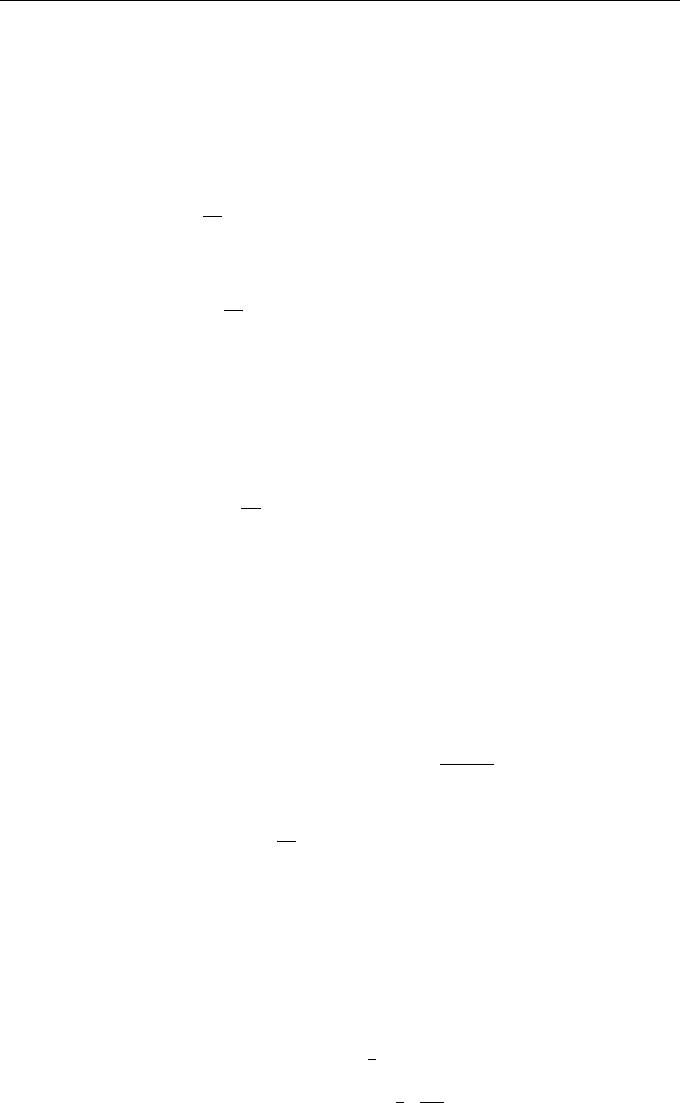
presented in Figure 13.5 (
p
2/tol =
√
200 ≈ 14.14 and x
14
= 0.0046.
0 0.5 1 1.5 2
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
s
n
x
n
0 0.5 1 1.5 2
0
2
4
6
8
10
12
s
n
t
n
Fig. 13.5 Numerical solution for Exercise 13.12 with λ = 1 and tol = 0.01.
Left: (s
n
, x
n
) (Circles) and (s, x(s)) (solid), Right: (s
n
, t
n
) (circles) and (s, t(s))
(solid)
14
Geometric Integration Part I—Invariants
14.1 Introduction
We judge a numerical method by its ability to “approximate” the ODE. It is
perfectly natural to
– fix an initial condition,
– fix a time t
f
and ask how closely the method can match x(t
f
), perhaps in the limit h → 0.
This led us, in earlier chapters, to the concepts of global error and order of
convergence. However, there are other senses in which approximation quality
may be studied. We have seen that absolute stability deals with long-time be-
haviour on linear ODEs, and we have also looked at simple long-time dynamics
on nonlinear problems with fixed points. In this chapter and the next we look
at another well-defined sense in which the ability of a numerical method to re-
produce the behaviour of an ODE can be quantified—we consider ODEs with a
conservative nature—that is, certain algebraic quantities remain constant (are
conserved) along trajectories. This gives us a taste of a very active research area
that has become known as geometric integration, a term that, to the best of our
knowledge, was coined by Sanz-Serna in his review article [60]. The material in
these two chapters borrows heavily from Hairer et al. [26] and Sanz-Serna and
Calvo [61].
Throughout both chapters, we focus on autonomous ODEs, where the right-
hand side does not depend explicitly upon t, so we have x
0
(t) = f (x).
Springer Undergraduate Mathematics Series, DOI 10.1007/978-0-85729-148-6_14,
© Springer-Verlag London Limited 2010
D.F. Griffiths, D.J. Higham, Numerical Methods for Ordinary Differential Equations,