Krantz W.B. Scaling Analysis in Modeling Transport and Reaction Processes: A Systematic Approach to Model Building and the Art of Approximation
Подождите немного. Документ загружается.

EXAMPLE PROBLEMS 93
u
z
= 0att = 0 (3.E.7-2)
u
z
= 0atr = R (3.E.7-3)
∂u
z
∂r
= 0atr = 0 (3.E.7-4)
In writing equation (3.E.7-1) we have used the fact that u
z
= f
1
(r, t) and that the
radial component of the equations of motion establishes that ∂P/∂r = 0, which in
turn implies that P = f
2
(z, t). In view of these considerations, the axial component
of the equations of motion then implies that ∂P/∂z =−P /L.
Introduce the following dimensionless variables (steps 2, 3, and 4):
u
∗
z
≡
u
z
u
s
; r
∗
≡
r
r
s
; t
∗
≡
t
t
s
(3.E.7-5)
Substitute these dimensionless variables into equations (3.E.7-1) through (3.E.7-4)
and divide through by the dimensional coefficient of a term that must be retained
to obtain (steps 5 and 6)
ρr
2
s
μt
s
∂u
∗
z
∂t
∗
=
P r
2
s
Lμu
s
+
1
r
∗
∂
∂r
∗
r
∗
∂u
∗
z
∂r
∗
(3.E.7-6)
u
∗
z
= 0att
∗
= 0 (3.E.7-7)
u
∗
z
= 0atr
∗
=
R
r
s
(3.E.7-8)
∂u
∗
z
∂r
∗
= 0atr
∗
= 0 (3.E.7-9)
We can bound our radial coordinate between zero and 1 by setting the dimen-
sionless group in equation (3.E.7-8) equal to 1 thereby obtaining r
s
= R (step 7).
Since pressure causes this flow, we obtain our velocity scale by setting the dimen-
sionless group in equation (3.E.7-6) equal to 1 thereby obtaining u
s
= P R
2
/Lμ.
Our time scale in this case is the observation time t
o
; that is, the arbitrary time at
which we chose to observe this flow after it is impulsively initiated. When these
scale factors are substituted into equations (3.E.7-6) through (3.E.7-9), we obtain
ρR
2
μt
o
∂u
∗
z
∂t
∗
= 1 +
1
r
∗
∂
∂r
∗
r
∗
∂u
∗
z
∂r
∗
(3.E.7-10)
u
∗
z
= 0att
∗
= 0 (3.E.7-11)
u
∗
z
= 0atr
∗
= 1 (3.E.7-12)
∂u
∗
z
∂r
∗
= 0atr
∗
= 0 (3.E.7-13)

94 APPLICATIONS IN FLUID DYNAMICS
We see from equation (3.E.7-10) that the unsteady-state term becomes insignif-
icant when the condition ρR
2
/μt
o
=
◦
(0.01) applies (step 8). This in turn implies
that steady-state will be achieved for observation times that satisfy the condition
t
o
ρR
2
μ
⇒ steady-state is achieved (3.E.7-14)
The unsteady-state flow problem described by equations (3.E.7-1) through (3.E.7-4)
has been solved analytically
21
; the solution indicates that the centerline (maximum)
velocity will be within 10% of its steady-state value when
t
o
= 0.45
ρR
2
μ
⇒
velocity is within 10%
of its steady-state value
(3.E.7-15)
It is surprising that the criterion that we derived from scaling analysis for achieving
steady-state conditions is far more demanding than that obtained from an exact solu-
tion to the describing equations. However, the criterion given by equation (3.E.7-
14) is based on the condition required for the pressure force to exactly balance the
viscous force in equation (3.E.7-6). The latter is proportional to the derivative of
the velocity profile. When the centerline (maximum) velocity is within 10% of its
steady-state value, the slope of the velocity profile at the wall, which is propor-
tional to the pressure applied, is nowhere near 10% of its steady-state value. Our
more demanding criterion ensures that we predict not only the maximum velocity
accurately via a steady-state solution, but also the drag at the wall.
3.E.8 Laminar Cylindrical Jet Flow
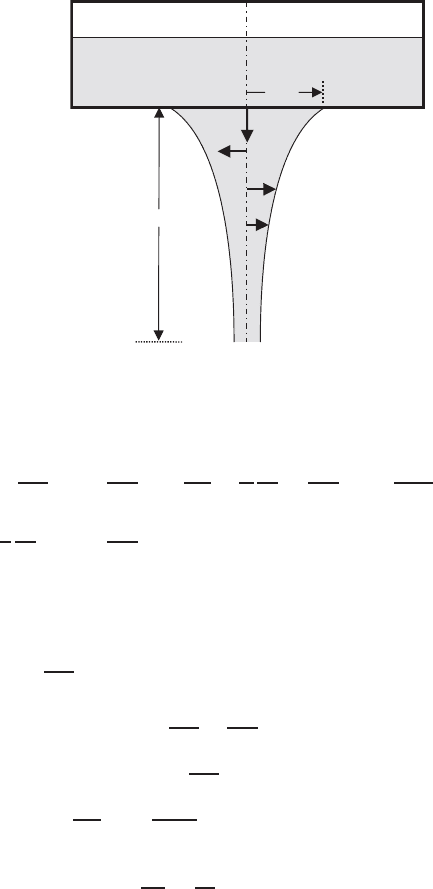
Consider the steady-state laminar flow of an incompressible Newtonian liquid jet
with constant physical properties issuing from a circular orifice of initial velocity
U
0
falling vertically under the influence of gravity in an inviscid gas as shown
in Figure 3.E.8-1. We assume that curvature and surface-tension effects can be
ignored in the tangential and normal stress boundary conditions at the interface
between the liquid jet and ambient gas phase.
22
We use scaling analysis to explore
the conditions for which quasi-parallel flow can be assumed; that is, when the axial
velocity profile can be assumed to depend only on the axial coordinate.
The appropriately simplified equations of motion in cylindrical coordinates given
by equations (C.2-1), (D.2-10), and (D.2-12) in the Appendices along with the
boundary and kinematic conditions are given by (step 1)
ρu
r
∂u
r
∂r
+ ρu
z
∂u
r
∂z
=−
∂P
∂r
+ μ
∂
∂r
1
r
∂
∂r
(ru
r
)
+ μ
∂
2
u
r
∂z
2
(3.E.8-1)
21
R. B. Bird, W. E. Stewart, and E. N. Lightfoot, Transport Phenomena, Wiley, New York, 1960 pp.
126–130.
22
Note that scaling analysis could be used to determine when surface-tension and curvature effects can
be neglected; the latter were considered in Section 3.7.
EXAMPLE PROBLEMS 95
Viscous liquid
z
h(z)
h(z + Δz)
r
R
L
Ambient gas phase
Figure 3.E.8-2 Steady-state flow of an incompressible Newtonian liquid that has constant
physical properties issuing as a jet from a circular orifice of radius R with an initial velocity
U
0
into an inviscid ambient gas phase.
ρu
r
∂u
z
∂r
+ ρu
z
∂u
z
∂z
=−
∂P
∂z
+
μ
r
∂
∂r
r
∂u
z
∂r
+ μ
∂
2
u
r
∂z
2
+ ρg (3.E.8-2)
1
r
∂
∂r
(ru
r
) +
∂u
z
∂z
= 0 (3.E.8-3)
u
z
= U
0
,u
r
= 0,P= P
atm
,η= R at z = 0 (3.E.8-4)
u
z
= f
1
(r), u
r
= f
2
(r) at z = L (3.E.8-5)
∂u
z
∂r
= 0,u
r
= 0atr = 0 (3.E.8-6)
τ
rz
=−μ
∂u
z
∂r
+
∂u
r
∂z
= 0
σ
rr
= P − 2μ
∂u
r
∂r
= P
atm
∂P
∂z
− 2μ
∂
2
u
r
∂z∂r
= 0
⎫
⎪
⎪
⎪
⎪
⎪
⎬
⎪
⎪
⎪
⎪
⎪
⎭
at r = η(z) (3.E.8-7)
dη
dz
=
u
r
u
z
at r = η(z) (3.E.8-8)
where f
1
and f
2
are unknown functions of r that are included for completeness
since in principle downstream boundary conditions are required for the veloc-
ity components. Equation (3.E.8-7) encompasses three boundary conditions at the
interface between the liquid jet and the ambient gas phase required for the three
dependent variables: pressure and the two velocity components. The first two of
these equations are the no-drag and continuity of the normal stress, respectively.
96 APPLICATIONS IN FLUID DYNAMICS
The third of these equations is obtained by differentiating the normal stress balance
with respect to z; this provides an independent condition interrelating the pressure
and velocity at the interface. Equation (3.E.8-8) is the kinematic surface condition
that is obtained by an integral mass balance on a differential volume element over
an arbitrary cross section of the jet. This is needed as an auxiliary condition to
obtain the location of the surface at which the no-slip and continuity of normal
stress boundary conditions must be applied.
Introduce the following scale factors, reference factors, and dimensionless vari-
ables (steps 2, 3, and 4):
u
∗
z
≡
u
z
− u
zr
u
zs
; u
∗
r
≡
u
r
u
rs
; P
∗
≡
P − P
r
P
s
; η
∗
≡
η
η
s
;
∂u
z
∂r
∗
≡
1
β
s
∂u
z
∂r
; z
∗
≡
z
z
s
; r
∗
≡
r
r
s
(3.E.8-9)
We have introduced reference factors for both the axial velocity and pressure since
neither of these variables is naturally referenced to zero. Note that we have also
introduced a scale β
s
for ∂u
z
/∂r since this derivative does not scale as u
zs
/r
s
.Ifwe
had used the latter to scale this derivative, the forgiving nature of scaling would have
indicated a contradiction. However, we anticipate the need to scale this derivative
with its own scale since u
z
does not change significantly across the jet. Introduce
these dimensionless variables into the describing equations and divide through by
the dimensional coefficient of a term that must be retained to obtain (steps 5 and 6)
u
∗
r
∂u
∗
r
∂r
∗
+
u
zs
r
s
u
rs
z
s
u
∗
z
+
u
zr
u
zs
∂u
∗
r
∂z
∗
=−
P
s
ρu
2
rs
∂P
∗
∂r
∗
+
μ
ρu
rs
r
s
∂
∂r
∗
1
r
∗
∂
∂r
∗
(r
∗
u
∗
r
)
+
μr
s
ρu
rs
z
2
s
∂
2
u
∗
r
∂z
∗2
(3.E.8-10)
u
rs
β
s
z
s
u
2
zs
u
∗
r
∂u
∗
z
∂r
∗
+
u
∗
z
+
u
zr
u
zs
∂u
∗
z
∂z
∗
=−
P
s
ρu
2
zs
∂P
∗
∂z
∗
+
μβ
s
z
s
ρu
2
zs
r
s
1
r
∗
∂
∂r
∗
r
∗
∂u
z
∂r
∗
+
μ
ρu
zs
z
s
∂
2
u
∗
z
∂z
∗2
+
gz
s
u
2
zs
(3.E.8-11)
1
r
∗
∂
∂r
∗
(r
∗
u
∗
r
) +
u
zs
r
s
u
rs
z
s
∂u
∗
z
∂z
∗
= 0 (3.E.8-12)
u
∗
z
=
U
0
− u
zr
u
zs
,u
∗
r
= 0,P
∗
=
P
atm
− P
r
P
s
,η
∗
=
R
η
s
at z
∗
= 0
(3.E.8-13)
u
∗
z
= f
∗
1
(r
∗
), u
∗
r
= f
∗
2
(r
∗
) at z
∗
=
L
z
s
(3.E.8-14)
∂u
∗
z
∂r
∗
= 0,u
∗
r
= 0atr
∗
= 0 (3.E.8-15)
EXAMPLE PROBLEMS 97
∂u
z
∂r
∗
+
u
rs
β
s
z
s
∂u
∗
r
∂z
∗
= 0
P
∗
= 2
μu
rs
P
s
r
s
∂u
∗
r
∂r
∗
+
P
atm
− P
r
P
s
∂P
∗
∂z
∗
− 2
μu
rs
P
s
r
s
∂
2
u
∗
r
∂z
∗
∂r
∗
= 0
⎫
⎪
⎪
⎪
⎪
⎪
⎪
⎬
⎪
⎪
⎪
⎪
⎪
⎪
⎭
at r
∗
=
η
s
r
s
η
∗
(3.E.8-16)
dη
∗
dz
∗
=
u
rs
z
s
u
zs
η
s
u
∗
r
u
∗
z
at r
∗
=
η
s
r
s
η
∗
(3.E.8-17)
Note ∂
2
u
z
/∂r
2
scales as β
s
/r
s
since ∂u
z
/∂r goes from its minimum value of zero
at r = 0 to its maximum value of β
s
at r = η(z).
We now apply step 7 to bound the variables to be
◦
(1). The dimensionless
groups consisting of geometric ratios in equations (3.E.8-13), (3.E.8-14), and
(3.E.8-16), when set equal to 1, imply that η
s
= r
s
= R and z
s
= L. The dimension-
less groups in equation (3.E.8-13) containing the reference velocity and pressure,
when set equal to zero, imply that u
zr
= U
0
and P
r
= P
atm
. Since gravity causes
flow in the axial direction, the dimensionless group that is a measure of the ratio
of the gravity force to the axial acceleration must be set equal to 1, thereby
obtaining the axial velocity scale u
zs
=
√
gL. Since this is a developing flow,
the dimensionless group in the continuity equation must be set equal to 1, thereby
obtaining the radial velocity scale u
rs
= R
√
gL/L. Since the two remaining terms
in the normal stress balance in equation (3.E.8-16) must balance, the dimension-
less group in this equation must be set equal to 1, thereby obtaining the pressure
scale P
s
= μ
√
gL/L. Finally, since the two terms in the zero-drag condition in
equation (3.E.8-16) must balance, the dimensionless group in this equation must be
set equal to 1, thereby obtaining the derivative scale β
s
= R
√
gL/L
2
. When these
values for the scale and reference factors are substituted into equations (3.E.8-10)
through (3.E.8-17), we obtain the following minimum parametric representation of
the describing equations:
u
∗
r
∂u
∗
r
∂r
∗
+
u
∗
z
+
U
0
√
gL
∂u
∗
r
∂z
∗
=−
1
Re
L
R
∂P
∗
∂r
∗
+
1
Re
L
R
∂
∂r
∗
1
r
∗
∂
∂r
∗
(r
∗
u
∗
r
)
+
1
Re
R
L
∂
2
u
∗
r
∂z
∗2
(3.E.8-18)
R
2
L
2
u
∗
r
∂u
∗
z
∂r
∗
+
u
∗
z
+
U
0
√
gL
∂u
∗
z
∂z
∗
=−
1
Re
R
L
∂P
∗
∂z
∗
+
1
Re
R
L
1
r
∗
∂
∂r
∗
r
∗
∂u
z
∂r
∗
+
1
Re
R
L
∂
2
u
∗
z
∂z
∗2
+ 1 (3.E.8-19)
1
r
∗
∂
∂r
∗
(r
∗
u
∗
r
) +
∂u
∗
z
∂z
∗
= 0 (3.E.8-20)
u
∗
z
= 0,u
∗
r
= 0,P
∗
= 0,η
∗
= 1atz
∗
= 0 (3.E.8-21)
98 APPLICATIONS IN FLUID DYNAMICS
u
∗
z
= f
∗
1
(r
∗
), u
∗
r
= f
∗
2
(r
∗
) at z
∗
= 1 (3.E.8-22)
∂u
∗
z
∂r
∗
= 0,u
∗
r
= 0atr
∗
= 0 (3.E.8-23)
∂u
z
∂r
∗
+
∂u
∗
r
∂z
∗
= 0
P
∗
= 2
∂u
r
∂r
∂P
∗
∂z
∗
− 2
∂
2
u
∗
r
∂z
∗
∂r
∗
= 0
⎫
⎪
⎪
⎪
⎪
⎪
⎬
⎪
⎪
⎪
⎪
⎪
⎭
at r
∗
= η
∗
(3.E.8-24)
dη
∗
dz
∗
=
u
∗
r
u
∗
z
at r
∗
= η
∗
(3.E.8-25)
where Re ≡ ρRu
zs
/μ = ρR
√
gL/μ is the Reynolds number.
Inspection of equations (3.E.8-18) through (3.E.8-25) indicates that the criteria
for assuming quasi-parallel flow are the following (step 8):
Re =
ρR
√
gL
μ
1
R
L
1
⎫
⎪
⎬
⎪
⎭
⇒ quasi-parallel flow (3.E.8-26)
When the conditions above apply, equations (3.E.8-18) through (3.E.8-25) sim-
plify to:
u
∗
z
+
U
0
√
gL
∂u
∗
z
∂z
∗
= 1 (3.E.8-27)
1
r
∗
∂
∂r
∗
(r
∗
u
∗
r
) +
∂u
∗
z
∂z
∗
= 0 (3.E.8-28)
u
∗
z
= 0,η
∗
= 1atz
∗
= 0 (3.E.8-29)
u
∗
r
= 0atr
∗
= 0 (3.E.8-30)
dη
∗
dz
∗
=
u
∗
r
u
∗
z
at r
∗
= η
∗
(3.E.8-31)
The solution to the system of equations above is straightforward and yields the
following solution for the axial velocity:
u
∗
z
=−
U
0
√
gL
+
U
2
0
gL
+ 2z
∗
⇒ u
z
=
U
2
0
+ 2gz (3.E.8-32)
This solution for the axial velocity profile corresponds to acceleration in free
fall, which of course is a reasonable solution under the assumption that the vis-
cous effects are negligible. Equations (3.E.8-32) can be substituted into equations
(3.E.8-28) and (3.E.8-31) to obtain the corresponding radial velocity and jet diam-
eter as a function of axial position.
EXAMPLE PROBLEMS 99
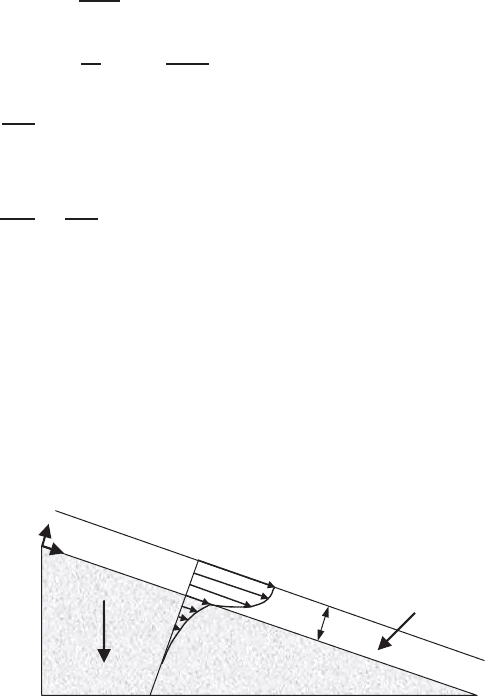
3.E.9 Gravity-Driven Film Flow over a Saturated Porous Medium
Consider the steady-state fully developed flow of an incompressible Newtonian
liquid film over an inclined liquid-saturated porous medium due to a gravitationally
induced body force, as shown in Figure 3.E.9-1. This flow could correspond to
runoff down water-saturated sloped ground. Because of the slope, gravity will
cause flow of both the liquid in the film and that within the porous medium. We
use scaling to determine when the flow through the porous medium has a negligible
effect on the flow of the liquid film.
The describing equations for this flow are obtained by simplifying equations
(D.1-10) and (E.1-1) in the Appendices appropriately (step 1):
0 = μ
d
2
u
x
dy
2
+ ρg sin θ 0 ≤ y ≤ H (3.E.9-1)
0 =−
μ
k
p
u
x
+ μ
d
2
u
x
dy
2
+ ρg sin θ −∞<y≤ 0 (3.E.9-2)
du
x
dy
= 0aty = H (3.E.9-3)
u
x
=u
x
at y = 0 (3.E.9-4)
du
x
dy
=
du
x
dy
at y = 0 (3.E.9-5)
u
x
= 0asy →−∞ (3.E.9-6)
where μ is the shear viscosity and k
p
is the Darcy permeability. Note that u
x
in the
porous medium is the superficial velocity; that is, the velocity through the porous
medium treated as if it were homogeneous. Equations (3.E.9-4) and (3.E.9-5) are
the continuity of velocity and shear at the interface between the porous medium and
the liquid film; the latter equation assumes that the effective viscosity of the liquid
flowing through the porous medium is the same as that of the liquid in the film.
x
y
Porous media
Liquid film
H
g
Figure 3.E.9-1 Steady-state fully developed laminar flow of an incompressible Newtonian
liquid film of thickness H with constant physical properties over an inclined liquid-saturated
porous medium due to a gravitationally induced body force.
100 APPLICATIONS IN FLUID DYNAMICS
Define the following dimensionless variables (steps 2, 3, and 4):
u
∗
x
≡
u
x
u
xs
;u
x
∗
≡
u
x
u
xs
; y
∗
≡
y
y
s
for 0 ≤ y ≤ H ;
y
∗
≡
y
y
s
for −∞<y≤ 0 (3.E.9-7)
We have introduced separate scales for the velocity as well as for the spatial coor-
dinate in the two regions. The need for this can be seen by considering the fact that
the maximum velocity in the porous medium is the minimum velocity in the liquid
film; hence, these two velocities must be scaled differently to achieve
◦
(1) scaling.
The different spatial coordinate scales are necessary because the velocity goes
between its maximum and minimum values over vastly different length scales in
the two regions. Note again that had we not done this, we would have arrived
at a contradiction in our scaled equations; the forgiving nature of scaling would
then indicate that we had not scaled some quantity so that it was bounded of
◦
(1).
Introduce these dimensionless variables and divide through by the dimensional
coefficient of one term in each of equations (3.E.9-1) through (3.E.9-6) to obtain
(steps 5 and 6)
0 =
d
2
u
∗
x
dy
∗2
+
ρgy
2
s
sin θ
μu
xs
, 0 ≤ y
∗
≤
H
y
s
(3.E.9-8)
0 =−u
∗
x
+
k
p
y
2
s
d
2
u
∗
x
dy
∗
2
+
ρgk
p
sin θ
μu
xs
, −∞ < y
∗
≤ 0 (3.E.9-9)
du
∗
x
dy
∗
= 0aty
∗
=
H
y
s
(3.E.9-10)
u
∗
x
=
u
xs
u
xs
u
x
∗
at y
∗
=y
∗
= 0 (3.E.9-11)
u
xs
y
s
u
xs
y
s
du
x
∗
dy
∗
=
du
∗
x
dy
∗
at y
∗
=y
∗
= 0 (3.E.9-12)
u
x
∗
= 0asy
∗
→−∞ (3.E.9-13)
The dimensionless group in equation (3.E.9-10) is set equal to 1, thereby obtain-
ing our length scale in the liquid film, y
s
= H (step 7). Since gravity causes the
flow in the liquid film, we set the dimensionless group that is a measure of the ratio
of the gravity force to the viscous drag in equation (3.E.9-8) equal to 1, thereby
obtaining our velocity scale u
xs
= ρgH
2
sin θ/μ. Since the principal viscous term
in equation (3.E.9-9) must be retained, we set its dimensionless coefficient equal to
1, thereby obtaining the length scale in the porous medium, y
s
=
k
p
. The max-
imum velocity in the porous medium occurs at its interface with the liquid film.
Hence, we set the dimensionless group in equation (3.E.9-12) equal to 1, thereby
obtaining our velocity scale in the porous medium, u
xs
= ρgH
k
p
sin θ/μ.When
EXAMPLE PROBLEMS 101
these values for the scale factors are substituted into equations (3.E.9-8) through
(3.E.9-13), we obtain the following minimum parametric representation of the
describing equations:
0 =
d
2
u
∗
x
dy
∗2
+ 1, 0 ≤ y
∗
≤ 1 (3.E.9-14)
0 =−u
∗
x
+
d
2
u
x
∗
dy
∗2
+
k
p
H
, −∞ < y
∗
≤ 0 (3.E.9-15)
du
∗
x
dy
∗
= 0aty
∗
= 1 (3.E.9-16)
u
∗
x
=
k
p
H
u
x
∗
at y
∗
=y
∗
= 0 (3.E.9-17)
du
x
∗
dy
∗
=
du
∗
x
dy
∗
at y
∗
=y
∗
= 0 (3.E.9-18)
u
x
∗
= 0asy
∗
→−∞ (3.E.9-19)
If the following condition holds, the form of the no-slip boundary condition given
by equation (3.E.9-17), (i.e., continuity of velocity across the interface between the
porous medium and the liquid film), reduces to the familiar zero velocity condition
at a stationary solid boundary (step 8):
k
p
H
1 ⇒ liquid film velocity
∼
=
0 at the interface with porous medium
(3.E.9-20)
Hence, if
k
p
/H =
◦
(0.01), the liquid film flow is described by the following set
of simplified describing equations:
0 =
d
2
u
∗
x
dy
∗2
+ 1, 0 ≤ y
∗
≤ 1 (3.E.9-21)
du
∗
x
dy
∗
= 0aty
∗
= 1 (3.E.9-22)
u
∗
x
= 0aty
∗
= 0 (3.E.9-23)
These are the equations describing film flow down an impermeable stationary solid
surface.
3.E.10 Flow in a Hollow-Fiber Membrane with Permeation
A membrane is a semipermeable medium that permits the passage of some molecu-
les, colloidal aggregates, or particles relative to others. A hollow-fiber module is
102 APPLICATIONS IN FLUID DYNAMICS
one form of a membrane contactor that consists of hundreds to thousands of small
hollow fibers encased in a cylindrical shell. In one configuration of this module
the parallel bundle of hollow fibers is sealed off at one end so that flow is possible
in only one direction. The feed is introduced on the shell side of the module. The
permeable components pass through the walls into the core of the hollow-fiber
membrane. They then proceed to flow in parallel through all the fibers, after which
they are collected as the product stream in the case of purification or concentration
of solutes or as a waste stream in the case of removing contaminants. Since the
permeable components flow in parallel through the hollow fibers, one can model
the hydrodynamics in a hollow-fiber module of this type by considering the flow
in a single fiber, as shown in Figure 3.E.10-1. Consider the case of a permeate
stream that consists of an incompressible Newtonian liquid with constant physical
properties. The flow through the core (called the lumen) of the hollow fiber is
complex since the mass flow increases as the permeate stream flows toward the open
end. We use scaling analysis to explore the conditions under which the describing
equations for this flow can be simplified.
The appropriately simplified equations of motion in cylindrical coordinates given
by equations (C.2-1), (D.2-10), and (D.2-12) in the Appendices along with the
boundary and auxiliary conditions are given by (step 1)
ρu
r
∂u
r
∂r
+ ρu
z
∂u
r
∂z
=−
∂P
∂r
+ μ
∂
∂r
1
r
∂
∂r
(ru
r
)
+ μ
∂
2
u
r
∂z
2
(3.E.10-1)
ρu
r
∂u
z
∂r
+ ρu
z
∂u
z
∂z
=−
∂P
∂z
+ μ
1
r
∂
∂r
r
∂u
z
∂r
+ μ
∂
2
u
z
∂z
2
(3.E.10-2)
1
r
∂
∂r
(ru
r
) +
∂u
z
∂z
= 0 (3.E.10-3)
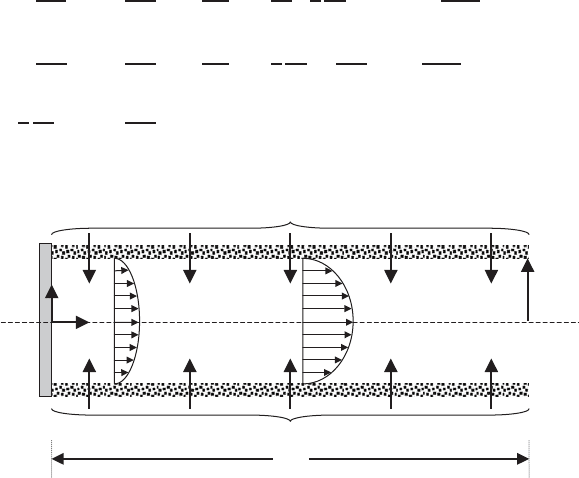
U
0
R
r
L
z
U
0
Figure 3.E.10-1 Flow of an incompressible Newtonian liquid in a cylindrical hollow-fiber
membrane of radius R, one end of which is closed and the other open, due to permeation
through the wall at a velocity U
0
; the axial velocity profiles shown at two axial positions
illustrate the acceleration caused by the mass addition due to the radial permeation.