Marder M.P. Condensed Matter Physics
Подождите немного. Документ загружается.


Nonlinear Elasticity 323
Figure 12.1. Rubber consists of a tangle of polymers, joined occasionally at nodes, but
otherwise free to slide about. However, there are forces between all the homopolymers
which strongly prefer a certain overall
fixed
density. The typical distance between nodes
where polymers bind together is
CRi.
conservation of density provided
λ,λ,λ
ζ
=1.
(12.7)
Since ds
x
/dx = λ* describes stretches along x, with similar expressions for y and
z,
the metric tensor in Eq. (12.3) and strain tensor in Eq. (12.5) become
8aß = X
2
Jaß (12.8)
^Ε
αβ
= \(\
2
α
-\)δ
αβ
(12.9)
The trace of any tensor such as Ε
α
β is invariant under rotations of coordinate axes.
This suggests taking the energy proportional to
ΊτΕ =
^{Χ
2
χ
+
Χ]
+
Χ
2
ζ
-3)
(12.10)
and imposing incompressibility through Eq. (12.7) to obtain the free energy per
volume for rubber due to Mooney (1940),
?
9 1 \
\
Δ
-j-
\
Δ
-| 3 1 G is a constant with dimensions of
energy
per ( \ 2 11)
X y
XjXj
I volume.
G is called the elastic modulus of rubber.
Example: Stretching a Circular Sheet. Consider stretching a circular rubber
sheet, of initial radius
RQ
in the
x—y
plane and thickness t along z. When the radius
increases to R =
RoX
x
=
RoX
y
,
the thickness must decrease to ÎRQ/R
2
to preserve
volume. So Eq. (12.11) becomes
3"
= -nRU
£)
2
+(t)
4
The
free energy per volume describes the en-
ergy
attributed to a volume element in the
ref-
erence
frame. So when summing up to get
the
free energy of the whole object, just
mul-
tiply
by the original volume, not the stretched
volume.
(12.12)
A comparison of
Eq.
(12.12) with experiment appears in Figure 12.2. Notice that G
for this sample is on the order of
5 ·
10
5
J m
-3
= 0.5 MPa. This is around 10
4
times
324
Chapter 12. Elasticity
smaller than elastic moduli for for materials such as glass or metal described in Ta-
ble 12.2. The reason rubber is so floppy can be understood in part by returning to
Eq. (5.73), which describes the free energy of polymers from a microscopic point
of view. The overall energy scale is set by kßT times the number of polymer seg-
ments per volume. The number of polymer segments per volume is the density of
molecular units per volume (around 10
22
/cm
3
) divided by the number of molecular
units per polymer chain between linking points (around 100). Assembling these
values gives a typical elastic modulus of 0.4 MPa.
Ë
u
60
G
1)
O
PU
50
■
—r
Y^^"
p
—B-
— g
D
□
1
a
!
a
1
□
D
12 3 4 5 6
Extension
R/RQ
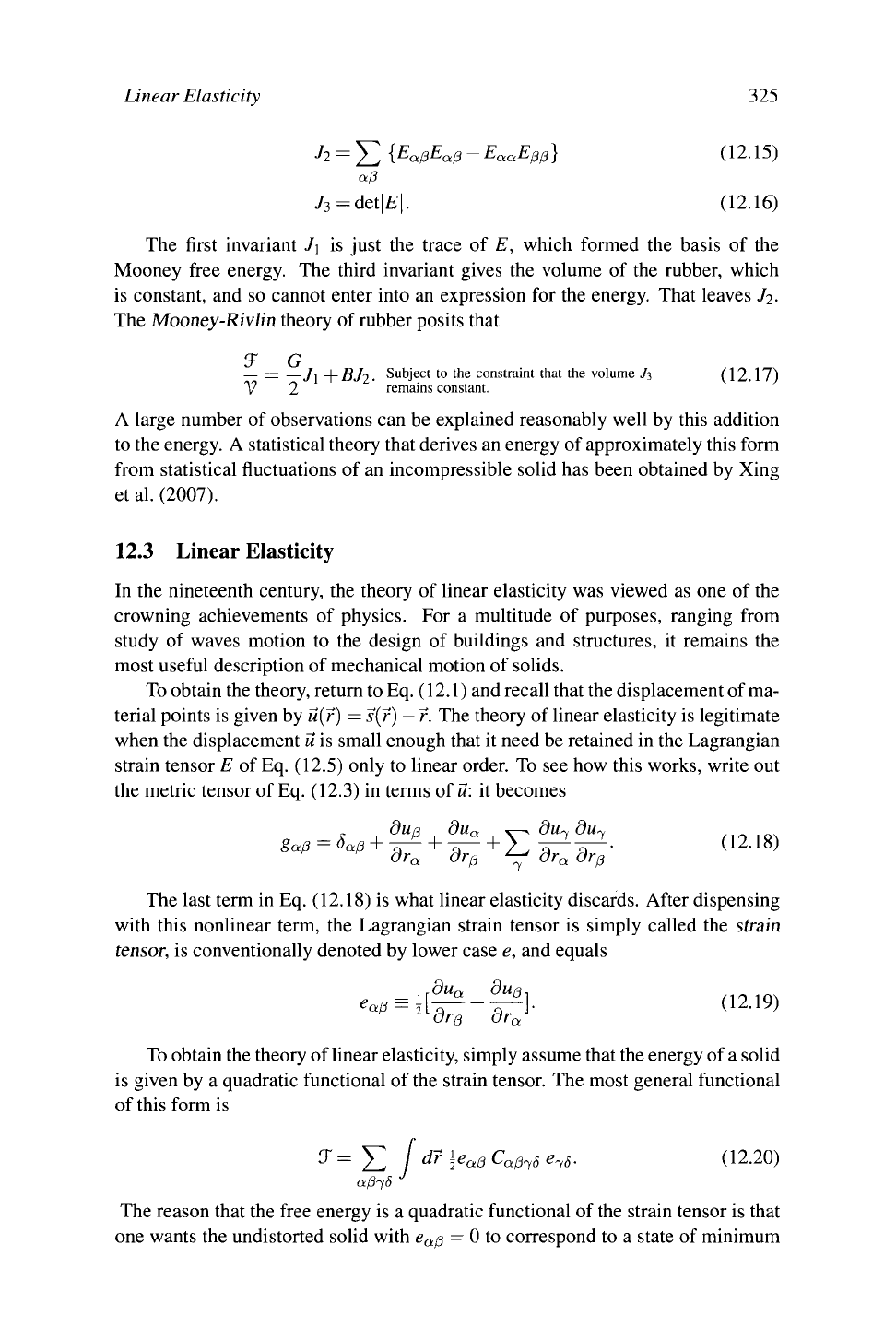
Figure 12.2. Force per length applied to circular rubber sheet, originally
1
cm thick, as it is
stretched uniformly beyond original size. Squares are data from Treloar (1975), p. 89, and
line is a plot offeree per length (\/R)(d3
r
/dR), using Eq. (12.12), scaled to match data.
Deviation of theory from experiment at large values of R is due to the fact that polymer
chains stiffen faster than quadratically when stretched too much.
12.2.2 Larger Extensions of Rubber
Figure 12.2 indicates that for large enough extensions, the Mooney theory no
longer applies, and rubber stiffens at a higher rate. In searching for a higher-order
term to add, symmetry provides a guide. The term should be invariant under rota-
tions of coordinate axes; that is, the energy of rubber should not depend upon an
arbitrary decision that some direction is x. To form rotationally invariant quantities
from the Lagrangean strain tensor, observe that
J(e) = det
E-el
Here / is a 3 x 3 unit tensor and
e
is a constant.
(12.13)
is invariant under coordinate rotations because determinants have this property.
The invariance obtains for all values of e, so it must hold for the quantity that
multiplies each power of
e
as well. This observation leads to three
strain invariants
Α=Σ
Ε
°
(12.14)
Linear Elasticity 325
h = z2
{
E
aßE
a
ß
- E
aa
Eßß } (12.15)
aß
/
3
= det|£|. (12.16)
The first invariant J\ is just the trace of E, which formed the basis of the
Mooney free energy. The third invariant gives the volume of the rubber, which
is constant, and so cannot enter into an expression for the energy. That leaves Jj.
The Mooney-Rivlin theory of rubber posits that
1 G
—
=
—J, -\-BJo· Subject to the constraint that the volume J3 (12.17)
V
2 remains constant.
A large number of observations can be explained reasonably well by this addition
to the energy. A statistical theory that derives an energy of approximately this form
from statistical fluctuations of an incompressible solid has been obtained by Xing
et al. (2007).
12.3 Linear Elasticity
In the nineteenth century, the theory of linear elasticity was viewed as one of the
crowning achievements of physics. For a multitude of purposes, ranging from
study of waves motion to the design of buildings and structures, it remains the
most useful description of mechanical motion of solids.
To obtain the theory, return to Eq. (12.1) and recall that the displacement of ma-
terial points is given by u(r) = ?(r)
—
r. The theory of linear elasticity is legitimate
when the displacement
Ü
is small enough that it need be retained in the Lagrangian
strain tensor E of
Eq.
(12.5) only to linear order. To see how this works, write out
the metric tensor of
Eq.
(12.3) in terms of
ü:
it becomes
du
ß
du
a
^
ÖM
7
ÖM
7
g
ö/
3 = <W + —^ +-— + > ^-
L
^-
L
· (12.18)
dr
a
dr
ß
^ dr
a
dr
ß
The last term in Eq. (12.18) is what linear elasticity discards. After dispensing
with this nonlinear term, the Lagrangian strain tensor is simply called the strain
tensor, is conventionally denoted by lower case e, and equals
_ du
a
du
ß
e
aß = ih l·-« ■ (12.19)
dr
ß
dr
a
To obtain the theory of linear elasticity, simply assume that the energy of
a
solid
is given by a quadratic functional of the strain tensor. The most general functional
of this form is
?=Σ dr \e
a
ßC
aßl5
e
l5
. (12.20)
αβηδ
The reason that the free energy is a quadratic functional of the strain tensor is that
one wants the undistorted solid with e
a
ß = 0 to correspond to a state of minimum
326
Chapter 12. Elasticity
energy.
If
any terms linear
in e
a
ß
were added
to
the theory, this would not
be the
case.
Because the strain tensor is symmetric under interchange
of
its indices, without
loss
of
generality one can take the tensor
C to be
invariant under the interchanges
a*->ß,
7
<->
δ
and also
aß ^ ηδ.
(12.21)
If
C
does not have these symmetries, then replace
it
with ^[C
a
g-ys +CßayS +6 more
terms],
which does have them. See Problem
1.
Therefore,
C
has
at
most 21 components. Equation (12.20) can also
be
rewrit-
ten
as
5"
= \ / (ff -e
n
R
(7„ii Generalization
of
"work equals force times
(\2 22)
^
i 2 ap ap,
distance
.>
aß
J
with the stress tensor
σ
given
by
σ
α
β
= 7^
Cgß-fS
?
Ί
δ-
(12.23)
7(5
12.3.1 Solids
of
Cubic Symmetry
Although 21 independent components
of
the tensor
C
are allowed
in
the most gen-
eral case, solids with more than triclinic symmetry have simpler tensors. For exam-
ple,
a
solid with cubic symmetry can have only three independent elastic constants.
Because cubic symmetry implies that the solid must
be
symmetrical under reflec-
tion about the
x-y, x-z,
and
y-z
planes, no constant C
Q
^
7
<5
is
allowed
in
which some
index assumes
a
value
an odd
number
of
times.
For
example,
C
xyyy
must
be
zero
because
it
is the coefficient of
e^e^,
and
e
xy
flips sign when
x
—>
—x, but the energy
of the crystal must be invariant under this change. Furthermore,
a
cubic crystal has
threefold axes that lead
it to be
symmetric under
x
—»
y
—>
z
—>
x.
Therefore,
any
coefficient
C
a
p
y
s
is
equal
to all
those that can be obtained from
it
by cyclic permu-
tation
of
its indices. Three independent parameters survive these considerations;
they may
be
taken
to
be
C
xxxx
, C
xxyy
,
and
C^.^.
The free energy becomes
j
I
^xxxx
[
e
xx
+
e
yy
+
e
zz
\
j
= I ctr
—
<
-\-l.l^
xxy
y
[£xx€
yy
+
c
yy
e
zz
-+-
e
z
+4C
x>
,xy
[e^y
+ e
yz
+ e^l
(12.24)
The reason that the last two terms have factors
of
2 and 4, respectively, reflects
the numbers
of
times they appear when one sums freely over
αβη
and
<5.
For
example,
é
1
shows up as the coefficient of
C
XVA>
.,
C
xyyx
, C
yxyx
,
and
C
yxxy
.
A conventional notation
for
elastic constants cuts
in
half the number
of
sum-
mations that must explicitly
be
mentioned
by
defining
Ζχχ €yy
&ZZ
^yz ^zx ^xy
ϊ
ϊ Ϊ [ I I
(12.25)
e\
β2 e-i <?4 e
5
e
6
Linear Elasticity
327
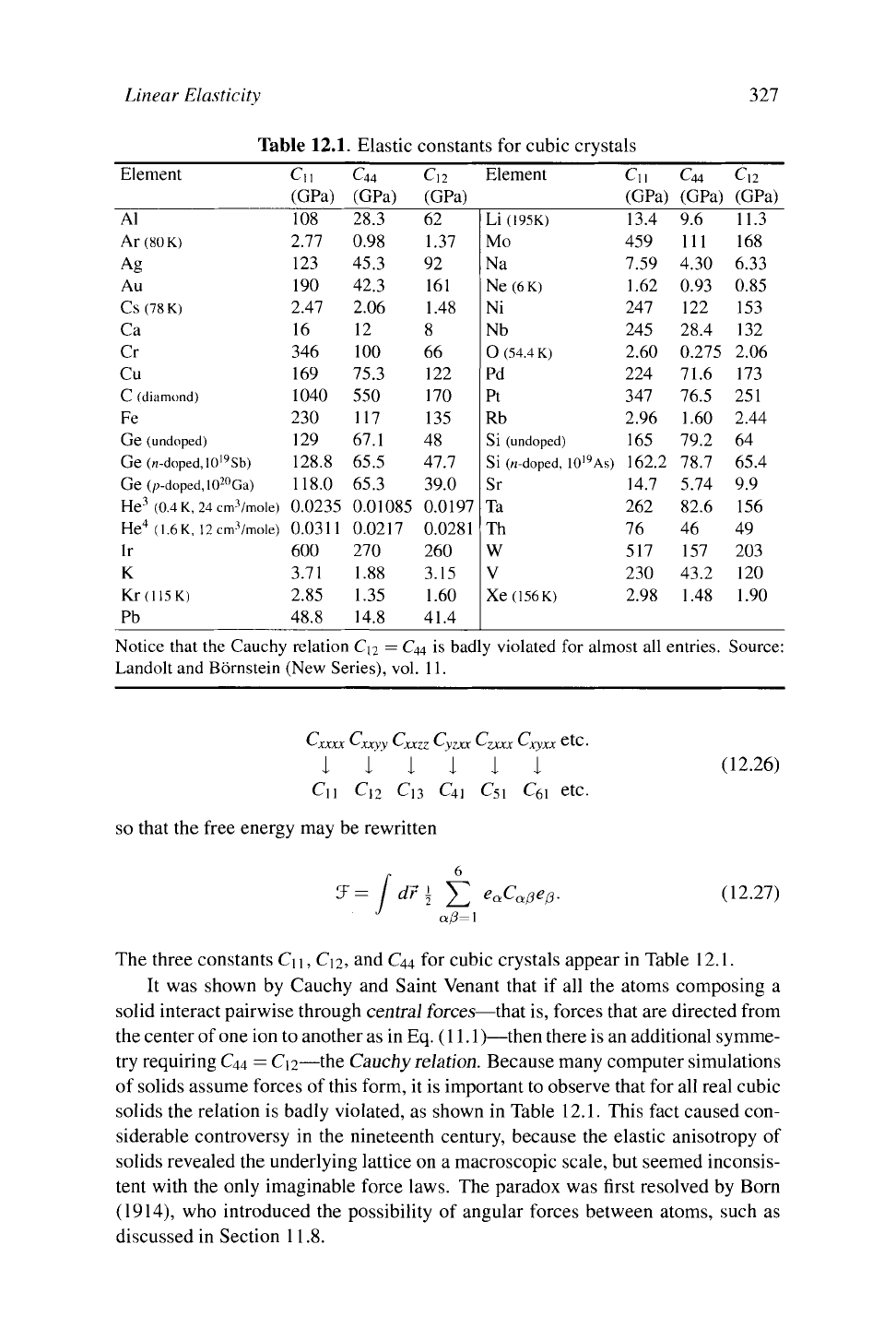
Table 12.1. Elastic constants for cubic crystals
Element Cu
(GPa)
C44
(GPa)
C12
(GPa)
Element Cu
(GPa)
C44
(GPa)
C12
(GPa)
Al
Ar(80K)
Ag
Au
Cs
(78
K)
Ca
Cr
Cu
C (diamond)
Fe
Ge (undoped)
Ge («-doped,
10
19
Sb)
Ge(/>doped,10
20
Ga)
He
3
(0.4
K,
24
He
4
(1.6
K,
12
Ir
K
Kr (115K)
Pb
cmVmole)
cm
3
/mole)
108
2.77
123
190
2.47
16
346
169
1040
230
129
128.8
118.0
0.0235
0.0311
600
3.71
2.85
48.8
28.3
0.98
45.3
42.3
2.06
12
100
75.3
550
117
67.1
65.5
65.3
0.01085
0.0217
270
1.88
1.35
14.8
62
1.37
92
161
1.48
8
66
122
170
135
48
47.7
39.0
0.0197
0.0281
260
3.15
1.60
41.4
Li (195K)
Mo
Na
Ne
(6 K)
Ni
Nb
O (54.4
K)
Pd
Pt
Rb
Si (undoped)
Si («-doped, 10
l9
As)
Sr
Ta
Th
W
V
Xe(156K)
13.4
459
7.59
1.62
247
245
2.60
224
347
2.96
165
162.2
14.7
262
76
517
230
2.98
9.6
111
4.30
0.93
122
28.4
0.275
71.6
76.5
1.60
79.2
78.7
5.74
82.6
46
157
43.2
1.48
11.3
168
6.33
0.85
153
132
2.06
173
251
2.44
64
65.4
9.9
156
49
203
120
1.90
Notice that the Cauchy relation C\2 = C44 is badly violated for almost all entries. Source:
Landolt and Bernstein (New Series), vol. 11.
*~-xxxx
^xxyy
*~-xxzz
^yzxx
*~zxxx
^xyxx ^C
·
C\\ C]2 C13 C4J C51 Cßi etc.
(12.26)
so that the free energy may be rewritten
3":
dr
6
Σ
aß=\
e
a
C
a
ßeß. (12.27)
The three constants C\\,C\2, and C44 for cubic crystals appear in Table 12.1.
It was shown by Cauchy and Saint Venant that if all the atoms composing a
solid interact pairwise through central forces—that is, forces that are directed from
the center of one ion to another as in Eq.
(11.1
)—then there is an additional symme-
try requiring C44 = Cn—the Cauchy relation. Because many computer simulations
of solids assume forces of this form, it is important to observe that for all real cubic
solids the relation is badly violated, as shown in Table 12.1. This fact caused con-
siderable controversy in the nineteenth century, because the elastic anisotropy of
solids revealed the underlying lattice on a macroscopic scale, but seemed inconsis-
tent with the only imaginable force laws. The paradox was first resolved by Born
(1914),
who introduced the possibility of angular forces between atoms, such as
discussed in Section 11.8.
328
Chapter 12. Elasticity
Bulk modulus. The bulk modulus of any solid is defined as B =
Vd
2
3
r
/dV
2
.
Uni-
form dilation of a solid is obtained by setting e
xx
= e
vy
= e
zz
=
SV/3V,
while the
other components of the strain tensor vanish. From Eq. (12.24), for a cubic crystal,
the free energy has the form
•5
= IV [Cu +2Ci
2
] [6V/V]
2
, (12.28)
and therefore the bulk modulus is given by
B = \[C
U
+2Q
2
}. (12.29)
12.3.2 Isotropie Solids
Many solids are effectively isotropie. In some cases, as in glass, it is difficult
to find any length scale much above the atomic for which there is any preferred
orientation. In other cases, such as commercial cast metals or ceramics, a solid
may be composed of so many crystalline grains of varying orientation that for
scales much above the grain size, no trace of crystalline anisotropy remains in the
elastic response. In this case, the number of elastic constants reduces to two.
To show that one constant disappears relative to the cubic case, it is sufficient
to recognize that isotropie solids possess all the symmetries of their cubic coun-
terparts, but with many additional symmetries that may simplify the free energy
beyond Eq. (12.24). One could impose, for example, the condition that the free
energy remain invariant under infinitesimal variations about the z axis. An alterna-
tive is to demand the free energy to remain invariant under 45° rotations about the
z axis. In this case, the strain tensor e
a
ß(r) transforms into e'
a
g{r'), where
e
a
ß(7) = Y
/
R*
ai
e'
1
s(r')R
Sß
(12.30a)
7(5
with
/I -1 0 \
r
f
= Rr aadR=-= I \ 1 0 . (12.30b)
V2
\0 0 y/l)
Substitute Eq. (12.30) into Eq. (12.24), subtract the free energy of the rotated
state from that of the unrotated state, and demand that the result vanish (Problem
3).
After carrying out the matrix multiplications and some algebra, the result is
0 =
{2C
X
y
X
y
+
C
XX
yy
~
Ο
ΧΧΧΧ
)(β
}7
~
2β
X
y
~ β
ΧΧ
)
(β
yy
+
2β
X
y
~ <?
XX
) (12.31)
^ ^-xxxx — ^xxyy τ Ά^-xyxy
■
\ l L.5L)
Substituting Eq. (12.32) into Eq. (12.24) allows the free energy to be written
3
=
\ I dr A{ Σ e
aa
) +2μ^
e
iß■
whereλ = Cmï andμ =
Crvrv
·
(12.33)
Linear Elasticity
329
9"
is now rotationally invariant, so there is no point in trying to apply additional ro-
tations to simplify it further. The numbers λ and μ are called the Lamé constants;
although convenient for analytical work, they are not the conventional constants
with which to report experimental properties of isotropie elastic media, so the pre-
sentation of typical values is deferred.
Equations of Motion and Equilibrium. Knowing the free energy associated with
any possible deformation of the solid and observing that while it is in motion there
will also be a kinetic energy
T= dr±p\U(r)\
2
, P is the mass density.
(12.34)
one can find the equation of motion for ü, by computing
pü
a
(r) = --—p- = Σ -^-
σ
αβ(~τ), (12.35)
àu
a
{r) y dr
ß
using Eq. (12.23) for the stress tensor,
Cgß = y
„ Cgß-yS
^
Ί
δ· (12.36)
Because the acceleration of small sections of mass is given by the divergence
of the stress tensor, the stress tensor is physically interpreted as giving the forces
that each section of
the
body exerts upon its neighbor. To see why, integrate (12.35)
over any small volume V bounded by closed surface Σ, to get
/
Jv
dr pii
Q
= / ί/Σ y~] Πβθβα Employ the divergence theorem, with η
β
a (12.37)
J ' component of the unit normal to surface Σ.
Taking the small volume to be a tiny cube oriented along the coordinate axes,
Eq.
( 12.37)
shows that the total force on the material inside the cube is provided
by the appropriate components of the stress tensor σ multiplied by the areas of the
cube faces.
Specifically, if one imagines taking a knife and using it to sever bonds in a
small two-dimensional region, say perpendicular to the x axis, then o
xx
gives the
force per unit area required to pull the faces of the region together along x, and σ^,
and σ
χζ
give the forces per unit area required to stretch the faces in the directions
perpendicular to x so that each atom is directly across from the atom that was its
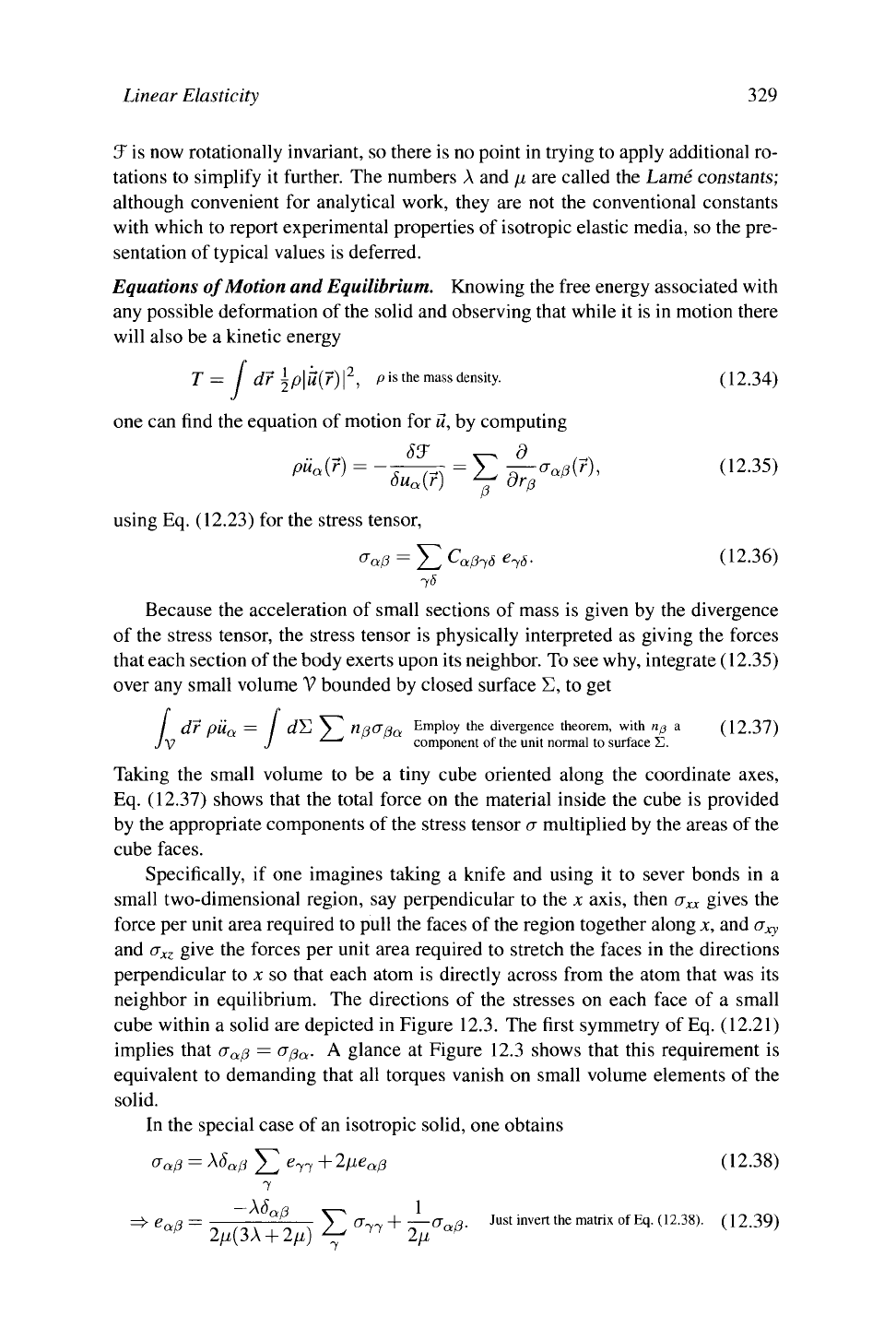
neighbor in equilibrium. The directions of the stresses on each face of a small
cube within a solid are depicted in Figure 12.3. The first symmetry of Eq. (12.21)
implies that σ
α
β = σβ
α
. A glance at Figure 12.3 shows that this requirement is
equivalent to demanding that all torques vanish on small volume elements of the
solid.
In the special case of an isotropie solid, one obtains
σ
αβ
= \δ
α
β Y] β
ΊΊ
+ 2μβ
αβ
(12.38)
7
\ r ι
α
-αβ = , ,
α0
~ Ν Y" σ
ΊΊ
+
—σ
αβ
.
Just invert the matrix of Eq.(
12.38).
(12.39)
p
2μ(3λ + 2μ) ^
Ί1
2μ
αρ
330 Chapter 12. Elasticity
i *
/
Figure 12.3. Imagine singling out a small cube from within a solid. Every face is po-
tentially under stress in three directions, and the sign conventions for the directions of the
stresses are shown
here.
The total force on each face is given by the stress in each direction
times the area of
the
face.
and the equation of motion Eq. (12.35) becomes
dH
P^ki = (λ + μ) V( V
■
ii) + /Λ7
2
Μ.
(12.40)
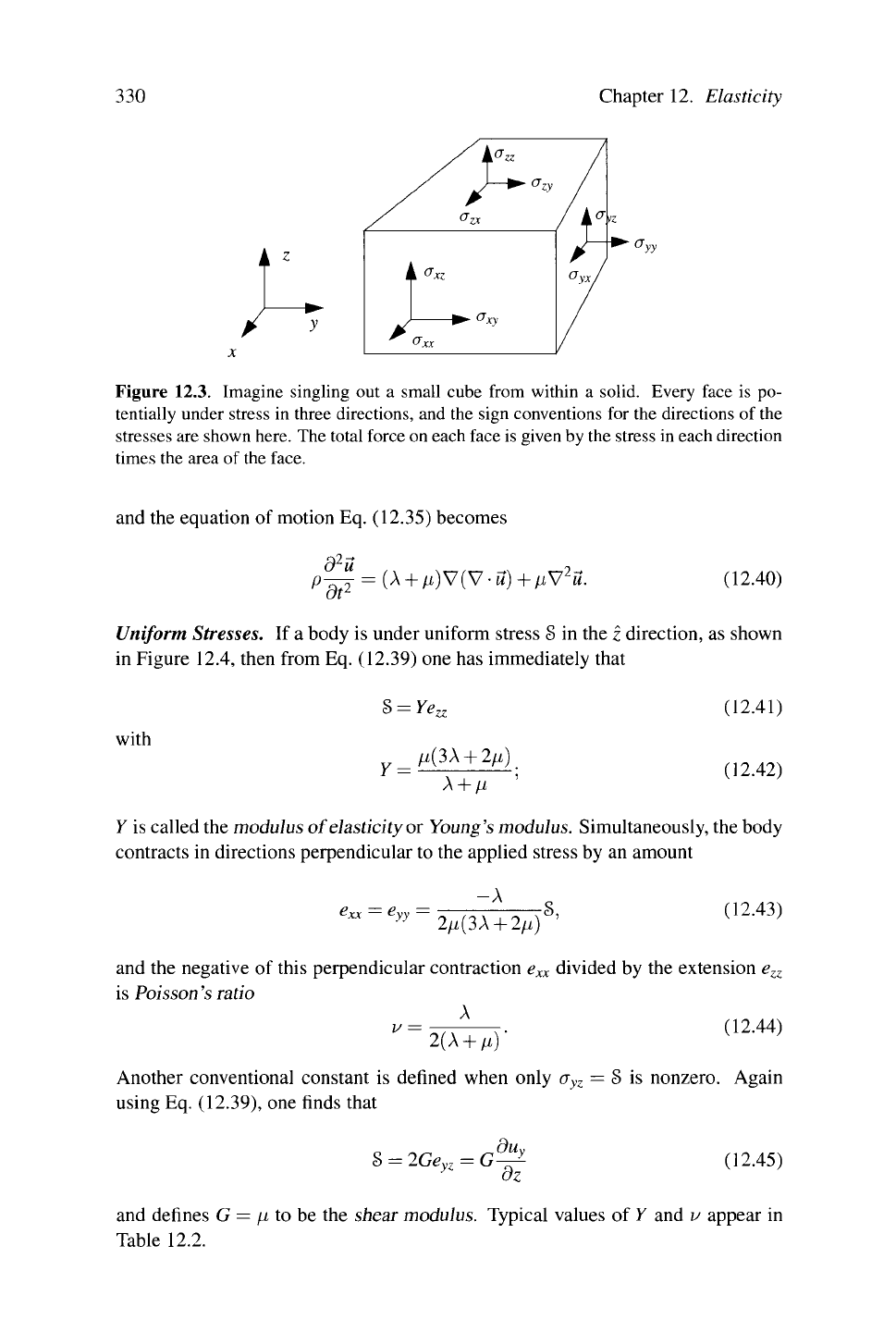
Uniform Stresses. If a body is under uniform stress S in the z direction, as shown
in Figure 12.4, then from Eq. (12.39) one has immediately that
%
=
Ye
7
with
μ(3λ +
2μ)_
λ + μ '
(12.41)
(12.42)
Y is called the modulus of elasticity or Young's modulus. Simultaneously, the body
contracts in directions perpendicular to the applied stress by an amount
-λ
6
XX
6yy
2μ(3λ + 2μ)
S,
(12.43)
and the negative of this perpendicular contraction e
xx
divided by the extension e
zz
is
Poisson 's
ratio
Another conventional constant is defined when only o
yz
= S is nonzero. Again
using Eq. (12.39), one finds that
S = 2Ge
yz
= G——
y
dz
(12.45)
and defines G = μ to be the shear modulus. Typical values of Y and v appear in
Table 12.2.
Linear Elasticity
331
o
6L
§ = —y =
e
77
y
L.
s
il
(A)
s
~]SL
S = —G = 2e„G
L
(JL
(B)
Figure 12.4. Geometries for the definitions of (A) Young's modulus Y and (B) the shear
modulus G.
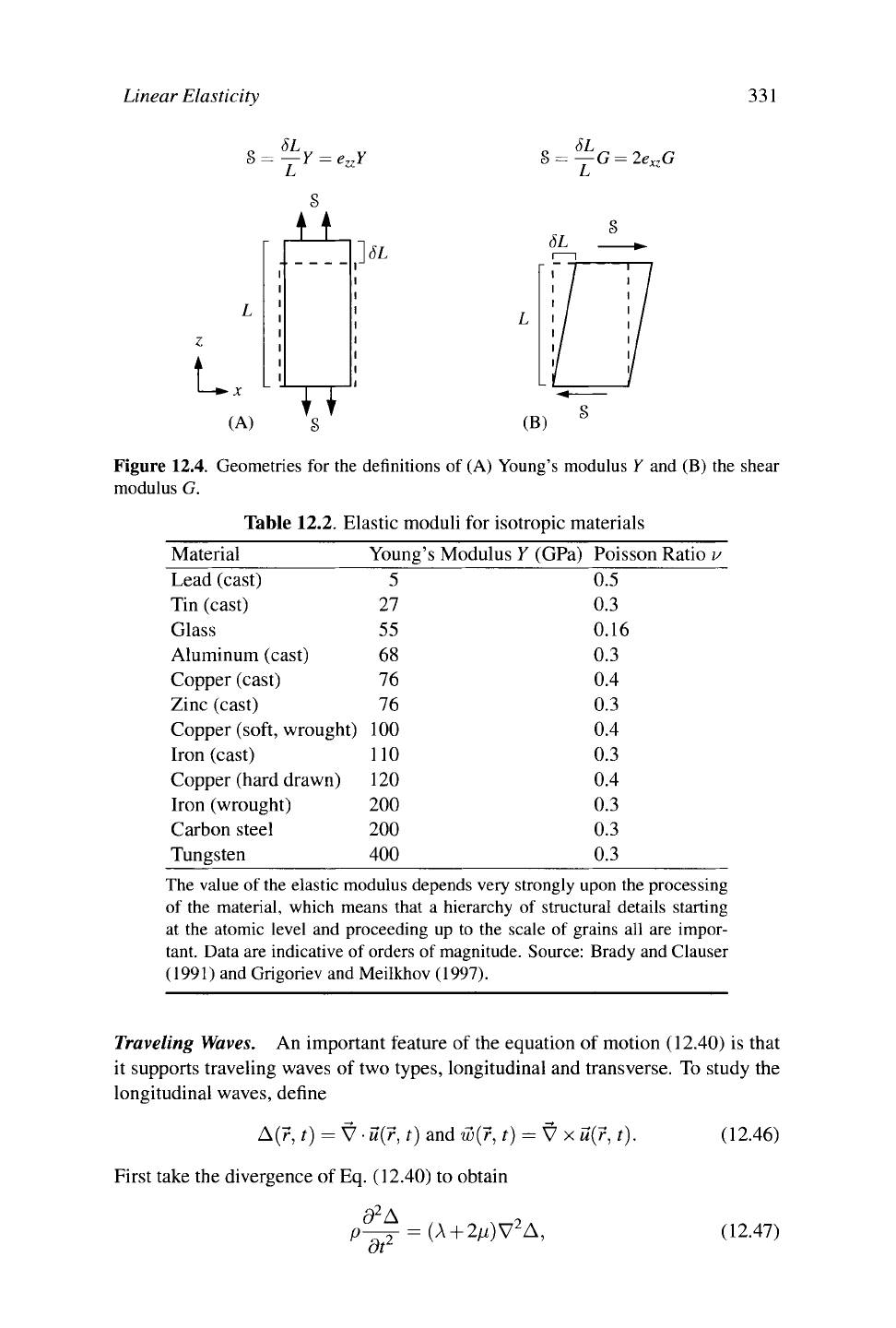
Table 12.2. Elastic moduli for isotropie materials
Material Young's Modulus Y (GPa) Poisson Ratio v
Lead (cast) 5
Tin (cast) 27
Glass 55
Aluminum (cast) 68
Copper (cast) 76
Zinc (cast) 76
Copper (soft, wrought) 100
Iron (cast) 110
Copper (hard drawn) 120
Iron (wrought) 200
Carbon steel 200
Tungsten 400
0.5
0.3
0.16
0.3
0.4
0.3
0.4
0.3
0.4
0.3
0.3
0.3
The value of the elastic modulus depends very strongly upon the processing
of the material, which means that a hierarchy of structural details starting
at the atomic level and proceeding up to the scale of grains all are impor-
tant. Data are indicative of orders of magnitude. Source: Brady and Clauser
(1991) and Grigoriev and Meilkhov (1997).
Traveling Waves. An important feature of the equation of motion (12.40) is that
it supports traveling waves of two types, longitudinal and transverse. To study the
longitudinal waves, define
A(r, t) = V
·
u(r, t) and w(r, t) = V x u(r, t).
First take the divergence of Eq. (12.40) to obtain
d
2
A
dt
2
(λ + 2μ)ν
2
Δ,
(12.46)
(12.47)

332
Chapter 12. Elasticity
and then take the curl to obtain
f) lì)
Q — n\7^yj Because the curl of a gradient vanishes. (ΥΣ 48)
Supposing
Ü
to be of the form
Üoe'
k
'
ir
~
luJt
shows that Eq.
( 12.47)
describes longitu-
dinal waves, where k and
UQ
are parallel, moving with speed
α = ^ψ, (12-49)
while Eq. (12.48) describes transverse waves, where k and
ÜQ
are perpendicular,
moving with speed
(12.50)
12.4 Other Constitutive Laws
12.4.1 Liquid Crystals
Understanding the mechanical forces needed to deform liquid crystals is important
for technical applications, because, for example, in liquid crystal displays, electri-
cal fields twist the molecules of the liquid crystal and thereby alter their optical
properties. The question naturally arises as to how hard one needs to twist this liq-
uid in order to make it turn. The question will be answered by asking how elasticity
is modified while accommodating the symmetries of liquid crystals.
The calculation will be carried out for a nematic liquid crystal and will be
restricted to the case where deformations of the material occur over length scales
much larger than the molecules of which it is composed. At every point, the liquid
crystal is described by a unit vector n(r), whose direction indicates the local axis
of the nematic.
The energy needed to deform a nematic is therefore an integral over space of
some function involving gradients of the unit vector h. Because the gradients are
supposed to be small, the theory will stop with the simplest collection of terms
that gives a nonzero result. There are two basic symmetries allowing one to reduce
the number of terms that must be considered. First, the head and tail of molecules
making up a nematic are indistinguishable, so no physical quantity should be able
to distinguish between h and
—h
or to tell if
the
system has been reflected about any
plane. Second, the free energy of the nematic must be independent of the reference
frame in which it is described. In particular, if one picks up a jar containing a
nematic and rotates it slightly, the calculation of the free energy cannot change just
because the point of view has altered.
Matters would be particularly simple if terms linear in gradients of
h
composed
the free energy. Unfortunately, one easily shows that all of them vanish. The only
Q