Masujima M. Applied Mathematical Methods in Theoretical Physics
Подождите немного. Документ загружается.

9.3 Euler Equation 317
Hence we obtain
f − y
∂f
∂y
= constant. (9.3.18b)
Returning to the Brachistochrone problem,wehave
1 + (y
)
2
y
−y
y
(1 + (y
)
2
)y
= constant,
or,
y(1 + (y
)
2
) = 2R.
Solving for y
,weobtain
dy
dx
= y
=
2R − y
y
. (9.3.19)
Hence we have
dy
y
2R − y
= x.
We set
y = 2R sin
2
(
θ
2
) = R(1 − cos θ). (9.3.20a)
Then we easily get
x = 2R
sin
2
(
θ
2
)dθ = R(θ − sin θ ). (9.3.20b)
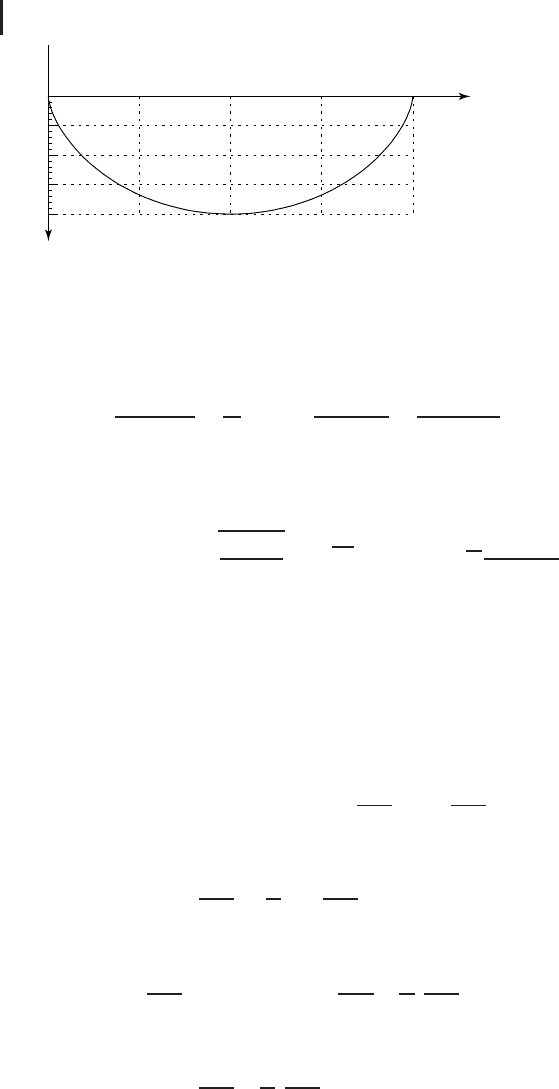
Equations (9.3.20a) and (9.3.20b) are the parametric equations for a cycloid,thecurve
traced by a point on the rim of a wheel rolling on the x-axis. The shape of a cycloid
is displayed in Figure 9.1.
We state several remarks on Example 9.4:
(1) The solution of the fastest fall is not a straight line. It is a cycloid with
infinite initial slope.
(2) There exists a unique solution. In our parametric representation of a
cycloid, the range of θ is implicitly assumed to be 0 ≤ θ ≤ 2π . Setting
θ = 0, we find that the starting point is chosen to be at the origin,
(x
1
, y
1
) = (0, 0). (9.3.21)
318 9 Calculus of Variations: Fundamentals
x
−
y
p
2p
0
−0.5
−1.0
−1.5
−2.0
Fig. 9.1 The curve traced by a point on the rim of a wheel rolling on the x-axis.
The question is that given the end point (x
2
, y
2
), can we uniquely determine
a radius of the wheel R.Weputy
2
= R(1 − cos θ
0
), and x
2
= R(θ
0
− sin θ
0
),
or,
1 − cos θ
0
θ
0
− sin θ
0
=
y
2
x
2
,2R =
2y
2
1 − cos θ
0
=
y
2
sin
2
(θ
0
2)
,
which has a unique solution in the range 0 <θ
0
<π.
(3) The shortest time of descent is
T =
x
2
0
dx
1 + (y
)
2
y
= 2
√
2R
θ
0
2
0
dθ =
√
y
2
θ
0
sin(θ
0
2)
. (9.3.22)
Example 9.5. Hamilton’s action principle in classical mechanics. Consider the
infinitesimal variation δq(t)ofq(t), vanishing at t = t
1
and t = t
2
,
δq(t
1
) = δq(t
2
) = 0. (9.3.23)
Then the Hamilton’s action principle demands that
δI = δ
t
2
t
1
L(q(t),
˙
q(t), t)dt =
t
2
t
1
δq(t)
∂L
∂q(t)
+ δ
˙
q(t)
∂L
∂
˙
q(t)
dt
=
t
2
t
1
dt
δq(t)
∂L
∂q(t)
+ (
d
dt
δq(t))
∂L
∂
˙
q(t)
=
δq(t)
∂L
∂
˙
q(t)
t=t
2
t=t
1
+
t
2
t
1
dtδq(t)
∂L
∂q(t)
−
d
dt
(
∂L
∂
˙
q(t)
)
=
t
2
t
1
dtδq(t)
∂L
∂q(t)
−
d
dt
(
∂L
∂
˙
q(t)
)
= 0, (9.3.24)

9.4 Generalization of the Basic Problems 319
where δq(t) is arbitrary other than the condition (9.3.23). From this, we obtain the
Lagrange equation of motion,
d
dt
(
∂L
∂
˙
q(t)
) −
∂L
∂q(t)
= 0, (9.3.25)
which is nothing but the Euler equation (9.3.14), with the identification
t ⇒ x, q(t) ⇒ y(x), L(q(t),
˙
q(t), t) ⇒ f (x, y, y
).
When the Lagrangian L(q(t),
˙
q(t), t) does not depend on t explicitly, the following
quantity:
˙
q(t)
∂L
∂
˙
q(t)
− L(q(t),
˙
q(t)) ≡ E, (9.3.26)
is a constant of motion and is called the energy integral, which is nothing but
Eq. (9.3.18b). Solving the energy integral for
˙
q(t), we can obtain the differential
equation for q(t).
9.4
Generalization of the Basic Problems
Example 9.6. Free end point: y
2
arbitrary.
An example is to consider, in the Brachistochrone problem, the dependence of the
shortest time of fall as a function of y
2
. The question is: What is the height of fall
y
2
which, for a given x
2
, minimizes this time of fall? We may, of course, start by
taking the expression for the shortest time of fall:
T =
√
y
2
θ
0
sin(θ
0
2)
=
2x
2
θ
0
√
θ
0
− sin θ
0
,
which, for a given x
2
, has a minimum at θ
0
= π,whereT =
√
2πx
2
. We shall,
however, give a treatment for the general problem of free end point.
To extremize
I =
x
2
x
1
f (x, y, y
)dx, (9.4.1)
with
y(x
1
) = y
1
and y
2
arbitrary, (9.4.2)
320 9 Calculus of Variations: Fundamentals
we require
δI =
∂f
∂y
εν(x )
x=x
2
+ ε
x
2
x
1
∂f
∂y
−
d
dx
(
∂f
∂y
)
ν(x)dx = 0. (9.4.3)
By choosing ν(x
2
) = 0, we get the Euler equation. Next we choose ν(x
2
) = 0and
obtain in addition,
∂f
∂y
x=x
2
= 0. (9.4.4)
Note that y
2
is determined by these equations.
For the Brachistochrone problem of arbitrary y
2
,weget
∂f
∂y
x=x
2
=
y
(1 + (y
)
2
)y
= 0 ⇒ y
= 0.
Thus θ
0
= π,andy
2
= x
2
(
2
π
), as obtained previously.
Example 9.7. Endpoint on the curve y = g(x):anexampleistofindtheshortest
time of descent to a curve. Note that in this problem, neither x
2
nor y
2
are given.
They are to be determined and related by y
2
= g(x
2
).
Suppose that y = y(x ) is the solution. This means that if we make a variation
y(x) → y(x) + εν(x), (9.4.5)
which intersects the curve at (x
2
+ x
2
, y
2
+ y
2
), then y(x
2
+ x
2
) + εν(x
2
+
x
2
) = g(x
2
+ x
2
), or
εν(x
2
) = (g
(x
2
) − y
(x
2
))x
2
, (9.4.6)
and that the variation δI vanishes:
δI =
x
2
+x
2
x
1
f (x, y + εν, y
+ εν
)dx −
x
2
x
1
f (x, y, y
)dx
f (x, y, y
)x
2
+
∂f
∂y
εν(x )
x=x
2
+
x
2
x
1
∂f
∂y
−
d
dx
∂f
∂y
εν(x )dx = 0.
Thus, in addition to the Euler equation, we have
f (x, y, y
)x
2
+
∂f
∂y
εν(x )
x=x
2
= 0,

9.4 Generalization of the Basic Problems 321
or, using Eq. (9.4.6), we obtain
f (x, y, y
) +
∂f
∂y
(g
−y
)
x=x
2
= 0. (9.4.7)
Applying the above equation to the Brachistochrone problem,weget
y
g
=−1.
This means that the path of fastest descent intersects the curve y = g(x)ataright
angle.
Example 9.8. The isoperimetric problem: find y(x) which extremizes
I =
x
2
x
1
f (x, y, y
)dx (9.4.8)
while keeping
J =
x
2
x
1
F(x, y, y
)dx fixed. (9.4.9)
An example is the classic problem of finding the maximum area enclosed by a
curve of fixed length.
Let y(x) be the solution. This means that if we make a variation of y which
does not change the value of J ,thevariationofI must vanish. Since J cannot
change, this variation is not of the form εν(x), with ν(x) arbitrary. Instead, we must
put
y(x) → y(x) + ε
1
ν
1
(x) + ε
2
ν
2
(x), (9.4.10)
where ε
1
and ε
2
are so chosen that
δJ =
x
2
x
1
∂F
∂y
−
d
dx
∂F
∂y
ε
1
ν
1
(x) + ε
2
ν
2
(x)
dx = 0. (9.4.11)
For these kinds of variations , y(x) extremizes I:
δI =
x
2
x
1
∂f
∂y
−
d
dx
∂f
∂y
ε
1
ν
1
(x) + ε
2
ν
2
(x)
dx = 0. (9.4.12)
Eliminating ε
2
,weget
ε
1
x
2
x
1
∂
∂y
f + λF
−
d
dx
∂
∂y
f + λF
ν
1
(x)dx = 0, (9.4.13a)
322 9 Calculus of Variations: Fundamentals
where
λ =
x
2
x
1
∂f
∂y
−
d
dx
∂f
∂y
ν
2
(x)dx
x
2
x
1
∂F
∂y
−
d
dx
∂F
∂y
ν
2
(x)dx
.
(9.4.13b)
Thus
f + λF
satisfies the Euler equation. The λ is determined by solving the
Euler equation, substituting y into the integral for J, and requiring that J takes the
prescribed value.
Example 9.9. Integral involves more than one function:
Extremize
I =
x
2
x
1
f (x, y, y
, z, z
)dx, (9.4.14)
with y and z taking prescribed values at the end points. By varying y and z
successively, we get
∂f
∂y
−
d
dx
∂f
∂y
= 0, (9.4.15a)
and
∂f
∂z
−
d
dx
∂f
∂z
= 0. (9.4.15b)
Example 9.10. Integral involves y
:
I =
x
2
x
1
f (x, y, y
, y
)dx, (9.4.16)
with y and y
taking prescribed values at the end points. The Euler equation is
∂f
∂y
−
d
dx
∂f
∂y
+
d
2
dx
2
∂f
∂y
= 0. (9.4.17)
Example 9.11. Integral is multidimensional:
I =
dxdtf (x, t, y, y
x
, y
t
), (9.4.18)
with y taking the prescribed values at the boundary. The Euler equation is
∂f
∂y
−
d
dx
∂f
∂y
x
−
d
dt
∂f
∂y
t
= 0. (9.4.19)
9.5 More Examples 323
9.5
More Examples
Example 9.12. Catenary:
(a) Shape of a chain hanging on two pegs: the gravitational potential of a chain of
uniform density is proportional to
I =
x
2
x
1
y
1 + (y
)
2
dx. (9.5.1a)
The equilibrium position of the chain minimizes I, s ubject to the condition
that the length of the chain is fixed,
J =
x
2
x
1
1 + (y
)
2
dx fixed. (9.5.1b)
Thus we extremize I + λJ and obtain
(y + λ)
1 + (y
)
2
= α constant,
or,
dy
(y + λ)
2
α
2
− 1
=
dx. (9.5.2)
We put
(y + λ)α = cosh θ , (9.5.3)
then
x − β = αθ, (9.5.4)
and the shape of the chain is given by
y = α cosh(
x − β
α
) − λ. (9.5.5)
The constants, αβ,andλ, are determined by the two boundary conditions
and the requirement that J is equal to the length of the chain.
Let us consider the case
y(−L) = y(L) = 0. (9.5.6)
324 9 Calculus of Variations: Fundamentals
Then the boundary conditions give
β = 0, λ = α cosh
L
α
. (9.5.7)
The condition that J is constant gives
α
L
sinh
L
α
=
l
L
, (9.5.8)
where 2l is the length of the chain. It is easily shown that, for l ≥ L, a unique
solution is obtained.
(b) Soap film formed by two circular wires: surface of soap film takes minimum
area as a result of surface tension. Thus we minimize
I =
x
2
x
1
y
1 + (y
)
2
dx, (9.5.9)
obtaining as in (a),
y = α cosh(
x − β
α
), (9.5.10)
where α and β are constants of integration, to be determined from the
boundary conditions at x =±L.
Let us consider the special case in which the two circular wires are of equal
radius R.Then
y(−L) = y(L) = R. (9.5.11)
We easily find that β = 0, and that α is determined by the equation
R
L
=
α
L
cosh
L
α
, (9.5.12)
which has zero, one, or two solutions depending on the ratio RL.Inorder
to decide if any of these solutions actually minimizes I, we must study the
second variation, which we shall discuss in Section 9.7.
Example 9.5. Hamilton ’s action principle in classical mechanics:
Let the Lagrangian L(q(t),
˙
q(t)) be defined by
L(q(t),
˙
q(t)) ≡ T(q(t),
˙
q(t)) − V(q(t),
˙
q(t)), (9.5.13)
9.5 More Examples 325
where T and V are the kinetic energy and the potential energy of the mechanical
system, respectively. In general, T and V can depend on both q(t)and
˙
q(t). When
T and V are given, respectively, by
T =
1
2
m
˙
q(t)
2
, V = V(q(t)), (9.5.14)
the Lagrange equation of motion (9.3.25) provides us Newton’s equation of motion,
m
¨
q(t) =−
d
dq(t)
V(q(t)) with
¨
q(t) =
d
2
dt
2
q(t). (9.5.15)
In other words, the extremization of the action integral I given by
I =
t
2
t
1
[
1
2
m
˙
q(t)
2
− V(q(t))]dt
with δq(t
1
) = δq(t
2
) = 0, leads us to Newton’s equation of motion (9.5.15). With T
and V given by Eq. (9.5.14), the energy integral E given by Eq. (9.3.26) assumes the
following form:
E =
1
2
m
˙
q(t)
2
+ V(q(t)), (9.5.16)
which represents the total mechanical energy of the system, quite appropriate for
the terminology, the energy integral.
Example 9.13. Fermat’s principle in geometrical optics:
The path of a light ray between two given points in a medium is the one which
minimizes the time of travel. Thus the path is determined from minimizing
T =
1
c
x
2
x
1
dx
1 + (
dy
dx
)
2
+(
dz
dx
)
2
n(x , y, z), (9.5.17)
where n(x, y, z) is the index of refraction. If n is independent of x,weget
n(y, z)
1 + (
dy
dx
)
2
+(
dz
dx
)
2
= constant. (9.5.18)
From Eq. (9.5.18), we easily derive the law of reflection and the law of refraction
(Snell’s law).

326 9 Calculus of Variations: Fundamentals
9.6
Differential Equations, Integral Equations, and Extremization of Integrals
We now consider the inverse problem: If we are to solve a differential or an integral
equation, can we formulate the problem in terms of problem of extremizing an
integral? This will have practical advantages when we try to obtain approximate
solutions of differential equations and approximate eigenvalues.
Example 9.14. Solve
d
dx
p(x)
d
dx
y(x)
−q(x)y(x) = 0, x
1
< x < x
2
, (9.6.1)
with
y(x
1
), y(x
2
)specified. (9.6.2)
This problem is equivalent to extremizing the integral
I =
1
2
x
2
x
1
p(x)(y
(x))
2
+ q(x)(y(x))
2
dx. (9.6.3)
Example 9.15. Solve the Sturm–Liouville eigenvalue problem
d
dx
p(x)
d
dx
y(x)
−q(x)y(x) = λr(x)y(x), x
1
< x < x
2
, (9.6.4)
with
y(x
1
) = y(x
2
) = 0. (9.6.5)
This problem is equivalent to extremizing the integral
I =
1
2
x
2
x
1
p(x)(y
(x))
2
+ q(x)(y(x))
2
dx, (9.6.6)
while keeping
J =
1
2
x
2
x
1
r(x)(y(x))
2
dx fixed. (9.6.7)
In practice, we find the approximation to the lowest eigenvalue and the corre-
sponding eigenfunction of the Sturm–Liouville eigenvalue problem by minimizing
IJ. Note that an eigenfunction good to the first order yields an eigenvalue good
to the second order.