Middleton W.M. (ed.) Reference Data for Engineers: Radio, Electronics, Computer and Communications
Подождите немного. Документ загружается.

28-1
2
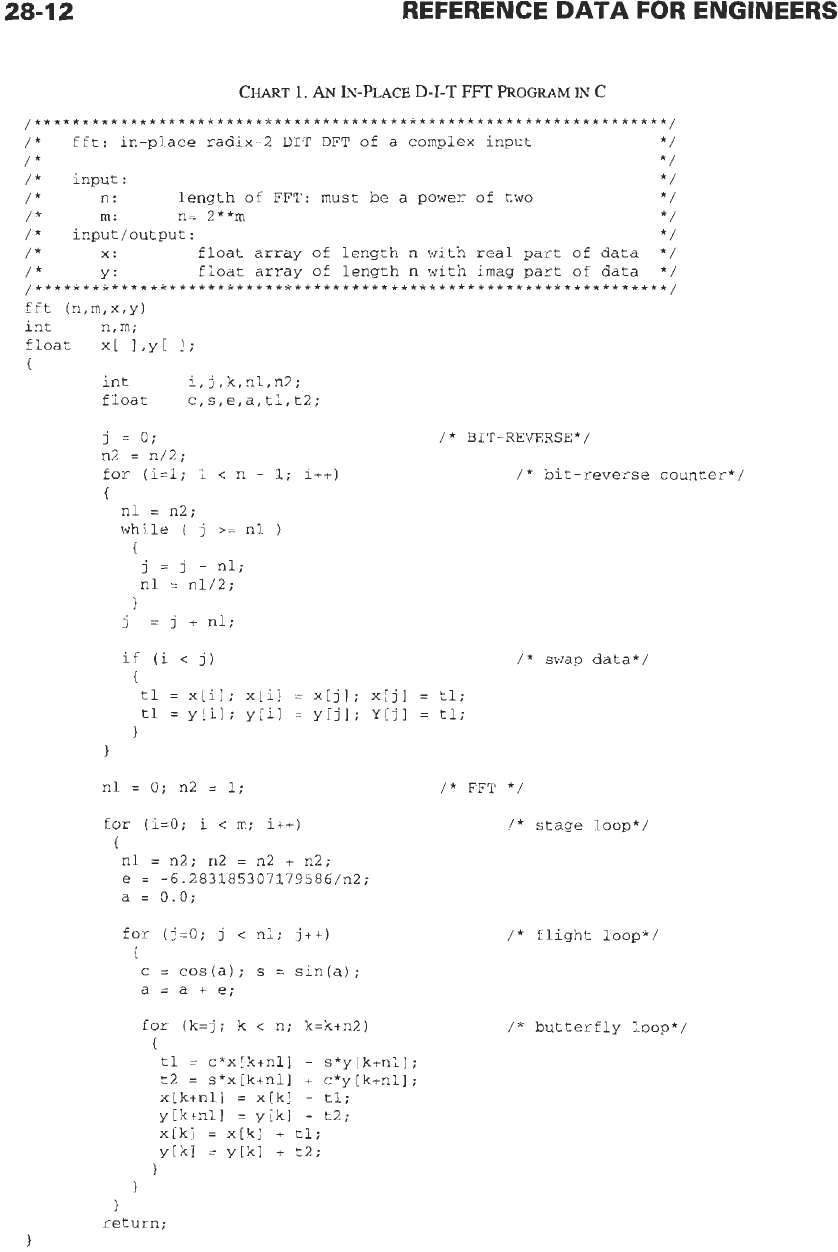
CHART
1.
AN
IN-PLACE
D-I-T
FFT
PROGRAM IN
C
....................................................................
/*
fft: in-place radix-2 DIT DFT of a complex inp-ct
*/
/* */
/*
input:
*/
/*
n:
length
of
FFT: must be
a
power of two
*/
/*
m:
n=
2**m
*/
/*
input/output:
*/
/*
x:
float array
of
length
n
with real part of data
*/
/*
Y:
float array
of
length
n
with imag part of data
*/
....................................................................
fft
in,m,x,y)
int
n,m;
float
x[ 1,y
I
int
float
j
=
0;
n2
=
n
I;
i
,
j
,
k,
nl
,
n2
;
c, s, e, a, tl, t2;
for
(i=l;
1
<
n
-
1;
i++)
{
nl
=
n2;
while
(
j
>=
nl
j
I
j
=
j
-
nl;
nl
=
11112;
j
=
j
+
nl;
}
/*
BIT-REVERSE*/
/*
bit-reverse counter*/
if
(i
i
j)
/*
swap d.ata*/
I
tl
=
x[il; x[il
=
x[jl;
x[jl
=
tl;
tl
=
y[il;
y[il
=
y[jl;
Y[jl
=
tl;
1
}
nl
=
0;
n2
=
1;
/*
FFT
*/
for (i=O; i
<
m; i++)
I
nl
=
n2;
n2
=
n2
+
n2;
e
=
-6.283185307179586/112;
a
=
0.0;
for
(j=O;
j
i
nl;
j++)
I
c
=
cos(aj;
s
=
sin(aj;
a=a+e;
for
(k=j;
k
<
n;
k=k+n2)
I
tl
=
c*x[k+nll
-
s*y[k+nll;
t2
=
s*x[k+nll
+
c*y[k+nl];
x[k+nlI
=
x[kl
-
tl;
y[k+nll
=
y[k]
-
t2;
x[kl
=
~[kl
+
tl;
~[kl
=
~[kl
+
t2;
1
/*
stage
loop*/
/*
flight
loop*/
/*
butterfly loop*/
1
return;
1
DISCRETE-TIME SIGNAL PROCESSING
28-1
3
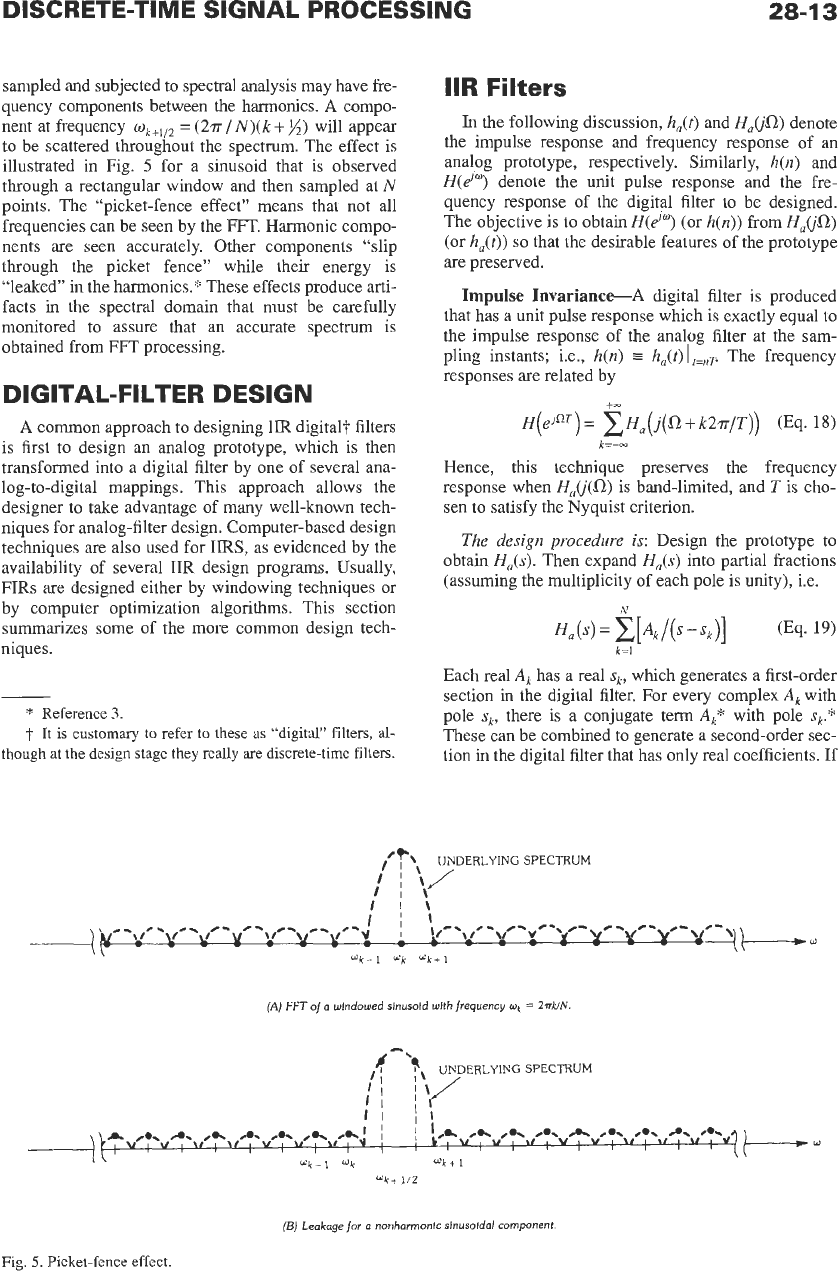
sampled and subjected to spectral analysis may have fre-
quency components between the harmonics.
A
compo-
nent at frequency
wk+1,2
=
(2~
/
N)(k
+
%)
will appear
to be scattered throughout
the
spectrum. The effect is
illustrated in Fig.
5
for a sinusoid that is observed
through a rectangular window and then sampled at
N
points. The “picket-fence effect” means that not all
frequencies can be seen by the FFT. Harmonic compo-
nents are seen accurately. Other components “slip
through the picket fence” while their energy is
“leaked” in the harmonics.* These effects produce arti-
facts in the spectral domain that must be carefully
monitored
to
assure that an accurate spectrum is
obtained from FFT processing.
DIG
ITAL-
FI
LTE
R
D
ESI
G
N
A
common approach to designing
IIR
digital? filters
is first to design an analog prototype, which is then
transformed into a digital filter by one of several ana-
log-to-digital mappings. This approach allows the
designer to take advantage of many well-known tech-
niques for analog-filter design. Computer-based design
techniques
are
also used for
IIRS,
as evidenced by the
availability of several
IIR
design programs. Usually,
FIRS
are designed either by windowing techniques
or
by computer optimization algorithms. This section
summarizes some of the more common design tech-
niques.
*
Reference
3.
t
It is customary to refer
to
these as “digital” filters,
al-
though at the design stage they really
are
discrete-time filters.
IIR
Filters
In
the following discussion,
h,(t)
and
H,(isz)
denote
the impulse response and frequency response of
an
analog prototype, respectively. Similarly,
h(n)
and
H(d”)
denote
the
unit pulse response and the fre-
quency response of the digital filter to be designed.
The objective is to obtain
H(d”)
(or
h(n))
from
Ha(@)
(or
h,(t))
so
that the desirable features of the prototype
are preserved.
Impulse
Invariance-A
digital filter is produced
that has a unit pulse response which is exactly equal
to
the impulse response of the analog filter at the
sam-
pling instants; i.e.,
h(n)
E
h,(t)lt=,zp
The frequency
responses
are
related by
+oa
Hence, this technique preserves the frequency
response when
HJj(i2)
is band-limited, and
T
is cho-
sen
to
satisfy the Nyquist criterion.
The design procedure
is:
Design the prototype to
obtain
Ha($).
Then expand HJs) into partial fractions
(assuming the multiplicity of each pole is unity), i.e.
Each real
A,
has a real
sk,
which generates a first-order
section in the digital filter. For every complex
A,
with
pole
sk,
there is a conjugate term
A&*
with pole
sk*
These can be combined to generate a second-order sec-
tion
in
the digital filter that has only real coefficients. If
‘’\
UNDERLYING
SPECTRUM
/I\
(A)
FFT
of
a
wlndowed sinusoid with frequency
ok
=
Zlrk/N
(BJ
Leakage
for
a
nonharmonlc
sinusoldal
component
Fig.
5.
Picket-fence effect
28-1
4
REFERENCE
DATA
FOR ENGINEERS
there are
M
real poles and
L
complex conjugate pairs,
the resulting digital filter becomes
where
a,
=
A,
(real)
b
-
+a/T
1-
cm
=
-2T
Re
{
Ak
}
ckl
=
-2T
e"k7
Re{
A,
e-joJcT
I
d
k2
- -
e2akT
dkl
=
-2
eakT
cos
(&T)
(Eq. 21)
and
sk
=
aik
+
j
Pk
is the k%h pole of
H,(s).
Note that
H(z)
is completely defined in terms of
ak,
sk,
and
T.
Features:
(I)
Good only for band-limited
Ha($).
(2)
Results initially in a parallel form.
(3)
O
=
QT
-+
linear relationship between the ana-
log and digital frequency variables.
(4)
The impulse invariant technique is not an alge-
braic mapping; i.e.,
H(z)
cannot be obtained
from
HJs)
by a substitution of variable.
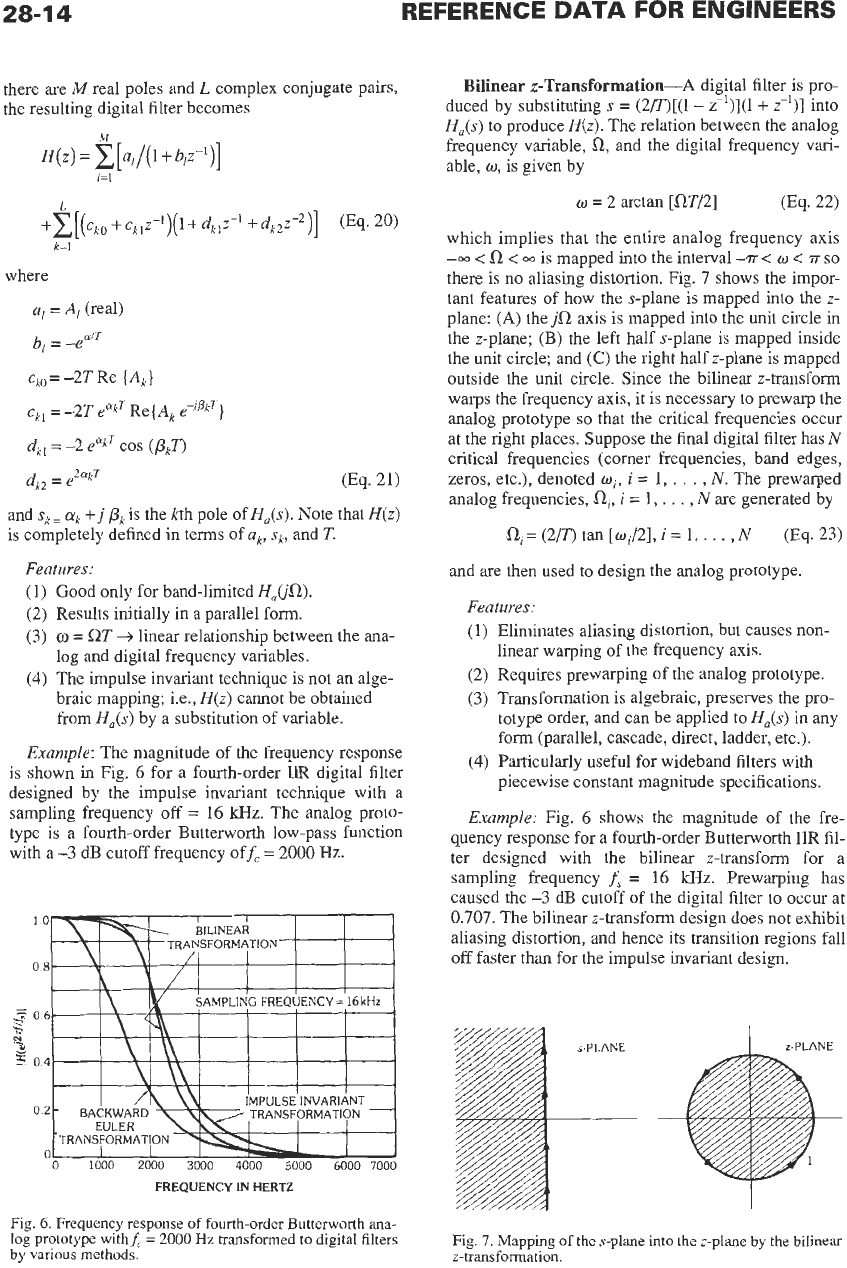
Example:
The magnitude of the frequency response
is shown in Fig. 6 for a fourth-order LIR digital filter
designed by the impulse invariant technique with a
sampling frequency off
=
16
kHz.
The analog proto-
type is a fourth-order Butterworth low-pass function
with a
-3
dB cutoff frequency off,
=
2000
Hz.
0
1000
2000
3000
4000
5000
6000
7000
FREQUENCY IN HERTZ
Fig.
6.
Frequency response
of
fourth-order Butterworth ana-
log prototype withf,
=
2000
Hz
transformed to digital filters
by
various
methods.
Bilinear z-Transformation-A
digital filter
is
pro-
duced by substituting
s
=
(2/T)[(1
-
z-')](l
+
z-')]
into
H,(s)
to
produce
H(z).
The relation between the analog
frequency variable,
a,
and the digital frequency vari-
able,
o,
is given by
o
=
2
arctan
[aT/2]
(Eq.
22)
which implies that the entire analog frequency axis
--w
<
a<
-
is mapped into the interval
-T
<
w
<
T
so
there
is
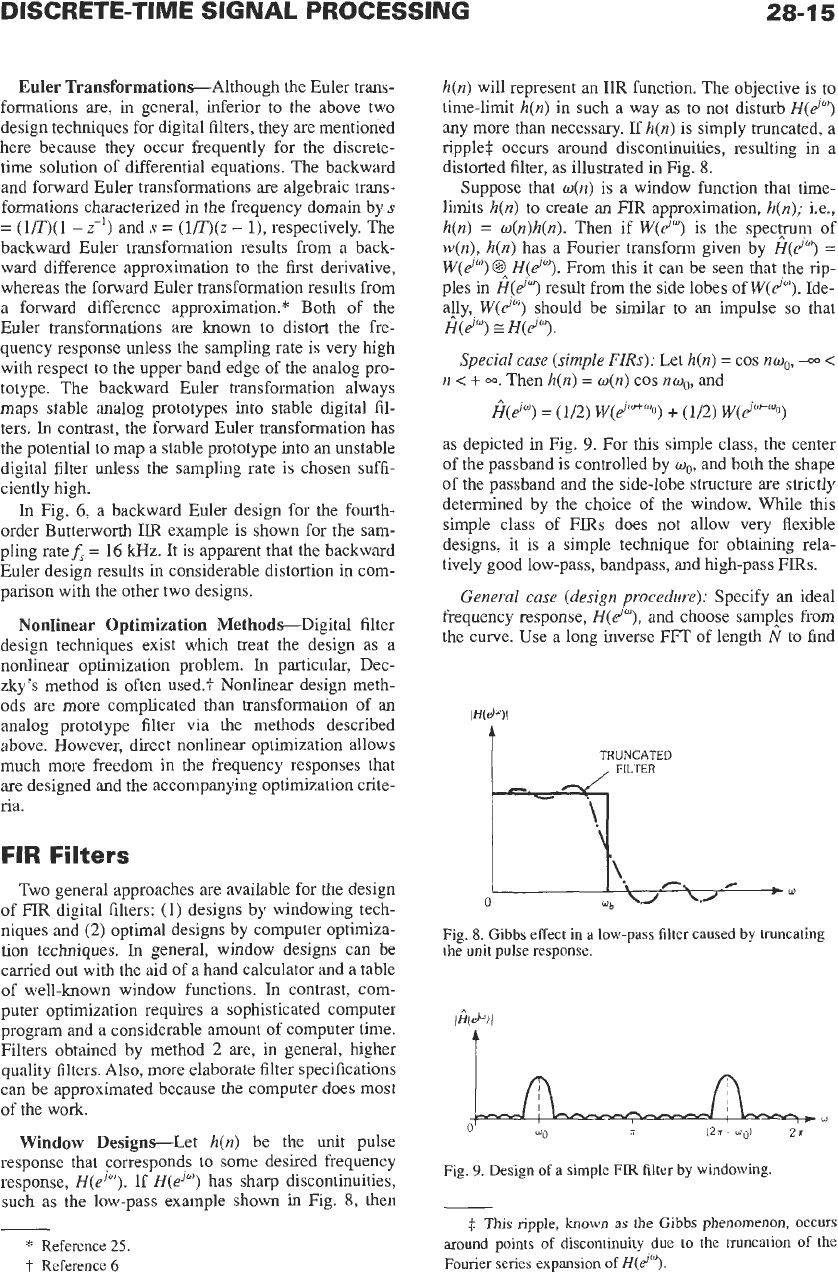
no aliasing distortion. Fig.
7
shows the impor-
tant features of how the s-plane is mapped into the
z-
plane:
(A)
the
ji2
axis is mapped into the unit circle in
the z-plane; (B) the left half s-plane is mapped inside
the unit circle; and
(C)
the right half z-plane is mapped
outside the unit circle. Since the bilinear z-transform
warps the frequency axis, it is necessary to prewarp the
analog prototype
so
that the critical frequencies occur
at the right places. Suppose the final digital filter has
N
critical frequencies (corner frequencies, band edges,
zeros, etc.), denoted
mi,
i
=
1,
.
. .
,
N.
The prewarped
analog frequencies,
ai,
i
=
1,
. . .
,
N
are generated by
a,
=
(2/T)
tan
[wi/2],
i
=
1,
. .
.
,
N
and are then used to design the analog prototype.
(Eq. 23)
Features:
(1) Eliminates aliasing distortion, but causes non-
(2) Requires prewarping of the analog prototype.
(3) Transformation is algebraic, preserves the pro-
totype order, and can be applied to
H,(s)
in any
form (parallel, cascade, direct, ladder, etc.).
(4)
Particularly useful for wideband filters with
piecewise constant magnitude specifications.
Example:
Fig.
6
shows the magnitude of the fre-
quency response for a fourth-order Butterworth IIR fil-
ter designed with the bilinear z-transform for a
sampling frequency
f,
=
16
IcHz.
Prewarping has
caused the
-3
dB cutoff of the digital filter to occur at
0.707.
The bilinear z-transform design does not exhibit
aliasing distortion, and hence its transition regions fall
off
faster than for the impulse invariant design.
linear warping of the frequency axis.
Fig.
7.
Mapping
of
the s-plane into the z-plane by the bilinear
z-transformation.
DISCRETE-TIME
SIGNAL
PROCESSING
28-1
5
Euler Transformations-Although the Euler trans-
formations are,
in
general, inferior to the above two
design techniques for digital filters, they
are
mentioned
here because they occur frequently for the discrete-
time solution
of
differential equations. The backward
and forward Euler transformations
are
algebraic trans-
formations characterized in the frequency domain by
s
=
(1/T)(l
-
z-')
and
s
=
(l/T)(z
-
1),
respectively. The
backward Euler transformation results from a back-
ward difference approximation to the first derivative,
whereas the forward Euler transformation results from
a forward difference approximation.* Both of the
Euler transformations are known to distort the fre-
quency response unless the sampling rate is very high
with respect to the upper band edge of the analog pro-
totype. The backward Euler transformation always
maps stable analog prototypes into stable digital fil-
ters.
In
contrast,
the
forward Euler transformation has
the potential to map a stable prototype into
an
unstable
digital filter unless the sampling rate is chosen suffi-
ciently high.
In
Fig.
6,
a backward Euler design for the fourth-
order Butterworth
IIR
example is shown for the
sam-
pling ratef,
=
16
Wz. It
is
apparent that the backward
Euler design results
in
considerable distortion
in
com-
parison with the other two designs.
Nonlinear Optimization Methods-Digital filter
design techniques exist which treat the design
as
a
nonlinear optimization problem.
In
particular, Dec-
zky's method is often used.? Nonlinear design meth-
ods are more complicated
than
transformation of an
analog prototype filter via the methods described
above. However, direct nonlinear optimization allows
much more freedom in the frequency responses that
are designed and the accompanying optimization crite-
ria.
FIR
Filters
Two general approaches are available for the design
of FIR digital filters:
(1)
designs by windowing tech-
niques and
(2)
optimal designs by computer optimiza-
tion
techniques.
In
general, window designs can be
carried out with the aid of a hand calculator and a table
of well-known window functions.
In
contrast, com-
puter optimization requires a sophisticated computer
program and a considerable amount of computer time.
Filters obtained by method
2
are, in general, higher
quality filters. Also, more elaborate filter specifications
can be approximated because the computer does most
of the work.
Window Designs-Let
h(n)
be the unit pulse
response that corresponds to some desired frequency
response,
H(eim).
If
H(eJ")
has sharp discontinuities,
such
as
the low-pass example shown
in
Fig.
8,
then
-
*
Reference
25.
t
Reference
6
h(n)
will represent an
IIR
function. The objective is to
time-limit
h(n)
in
such a way
as
to not disturb
H(d")
any more than necessary. If
h(n)
is simply truncated,
a
ripple4 occurs around discontinuities, resulting in a
distorted filter, as illustrated
in
Fig.
8.
Suppose that
w(n)
is a window function that time-
limits
h(n)
to
create an
FIR
approximation,
h(n);
i.e.,
h(n)
=
w(n)h(n).
Then if
W(d")
is the specpm of
w(n),
h(n)
has a Fourier transform given by
N(d")
=
W(d")
O_
H(d").
From this it can be seen that the rip-
ples in
H(dW)
result from
the
side lobes
of
W(dw).
Ide-
aily,
W(e'"')
should be similar to an impulse
so
that
Special case (simple
FIRS):
Let
h(n)
=
cos
nuo,
-
<
H(d")
EH(d").
n
<
+
m.
Then
h(n)
=
o(n)
cos
nw,,
and
$P)
=
(1~)
w(P+"o)
+
(1/2)
W(e'*"O>
as depicted in Fig.
9.
For this simple class, the center
of the passband is controlled by
coo,
and both the shape
of the passband and the side-lobe structure
are
strictly
determined by the choice of the window. While this
simple class of
FIRS
does not allow very flexible
designs, it is a simple technique for obtaining rela-
tively good low-pass, bandpass, and high-pass
FIRS.
General case (design procedure):
Specify an ideal
frequency response,
H(e""),
and choose sampies from
the curve. Use a long inverse
FFT
of length
N
to
find
1
H(dw)
I
TRUNCATED
,
FlLTER
Fig.
8.
Gibbs
effect
in
a
low-pass
filter
caused
by
truncating
the
unit
pulse
response.
Fig.
9.
Design
of
a
simple
FIR
filter
by
windowing.
$
This
ripple,
known
as
the
Gibbs
phenomenon,
occurs
around
points
of
discontinuity
due
to
the
truncation
of
the
Fourier
series
expansion
of
~(ei").
28-1
6
REFERENCE
DATA
FOR ENGINEERS
an approximation
io
h(n),
where
ifN
is the desired length
of the
HR,
then
N
>>
N.
Then use a carefully selected
window to truncate
h(n)
according to
hjn)
=
w(n)lz(n).
Finally, use an
FFT
of length
N
to find
H(d”).
If
h(dw)
is a satisfactory approximation to
H(dw),
the design is
finished. If not, choose a new
H(dw)
or a new
o(n)
and
repeat. Throughout the procedure, it is important to
choose
N
=
W,
with
k
an integer in the range [4,
.
. .
,
101.
The
k
should be made as large as possible within
the limits of the computer resources. This design tech-
nique is
a
trial-and-error procedure. The quality
of
the
result will depend to some degree on the skill and
experience of the designer.
Table 4 lists a few well-known window functions
that can be used in this procedure. An extensive list of
windows and their figures of merit has been published
in Reference
12.
Computer Design
by
Equiripple Approxima-
tion-There are quite a few publications and numer-
ous
computer programs that deal with optimized
designs for
FIRS
using equiripple approximations in
the frequency domain. One popular program that has
been widely distributed is the one published by
McClellan, et. al.* This program is capable of design-
ing bandpass (including low-pass and high-pass), dif-
ferentiator, and Hilbert-transform
FIR
filters under the
constraint of linear phase. Fig.
10
illustrates an equir-
ipple approximation for an ideal low-pass response.
In
the program, the order,
N,
of the equiripple approxi-
mation (also the resulting order
of
the FIR design) is
fixed by the designer. Also, the designer specifies the
transition band, which is treated as a “don’t care”
interval during the computer optimization; Le., the
optimization is unconstrained in this interval. This
particular program uses the Remez Exchange Algo-
rithm to find the best equiripple approximation to the
specified response, returning to the user the FIR coef-
10
1
-
6,
6
w
Fig.
10.
Equiripple approximation to an ideal low-pass
response.
*
Reference
22.
Note that this program has been integrated into many com-
mercially available
DSP
software design tools.
ficients and the stopband and passband ripple factors.
If the result is unsatisfactory, the user can change the
order,
N,
the transition width or the relative weighting
factors in the various bands to improve the result.
In
general, this design program is easy to use, executes
efficiently, and produces excellent results.
In
certain
circumstances, the design for multiple-band bandpass
filters results in undesirable resonance peaks
in
the
“don’t-care’’ bands, a problem that has been addressed
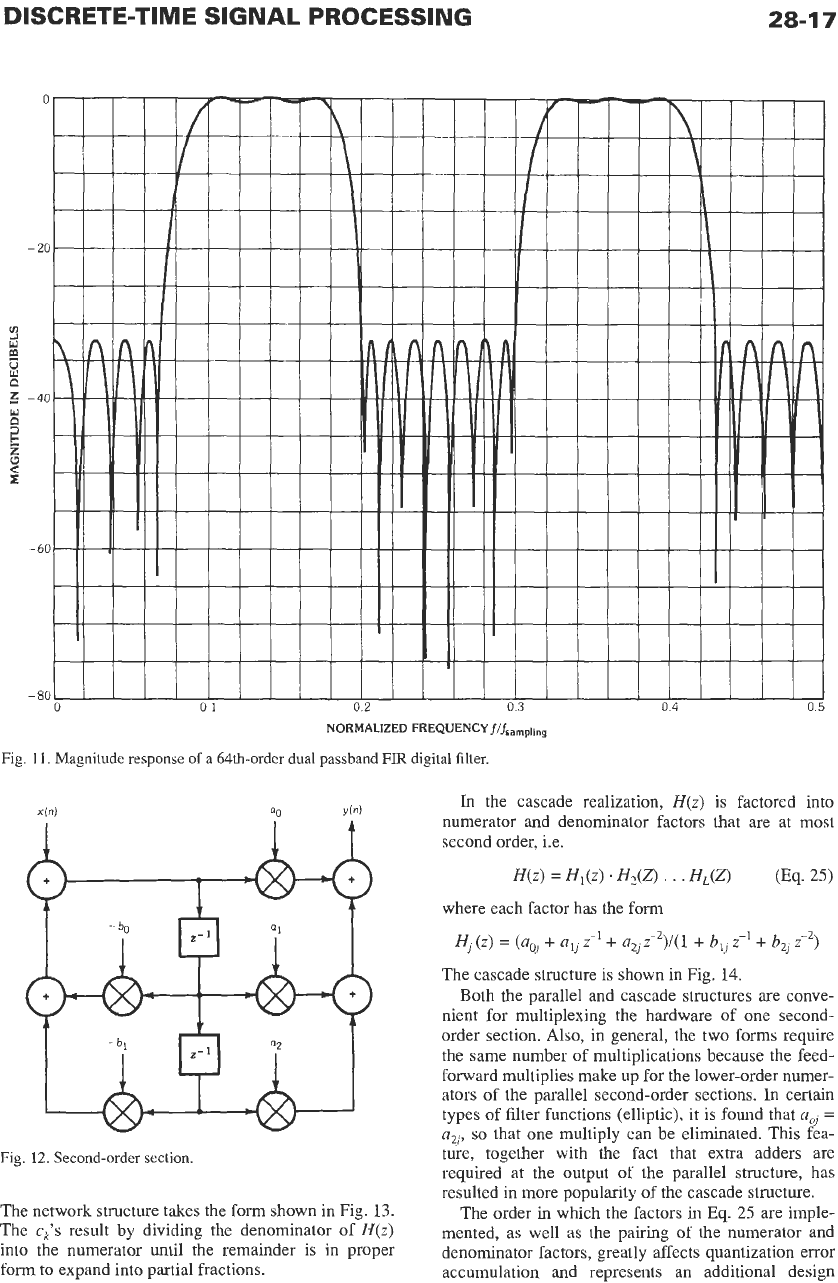
in the literature. Fig.
11
shows a 64th-order dual
bandpass FIR filter that was designed with the pro-
gram of McClellan,
et.
al.?
DIG
ITAL-FI LTE
R
IMPLEMENTATION
The fundamental building blocks for implementing
digital filters are multipliers, adders, unit delay regis-
ters, and semiconductor memories.
This
section
addresses some of the issues concerning the selection
of a network topology, arithmetic number codes, and
the analysis of quantization effects in digital signal
processors. Much of the discussion is directed toward
IIR
digital filters, because the feedback
in
W
struc-
tures causes the performance to be rather sensitive to
network topology and the effects of quantization error.
Network Structures
The generic building block for
IIR
filters is the sec-
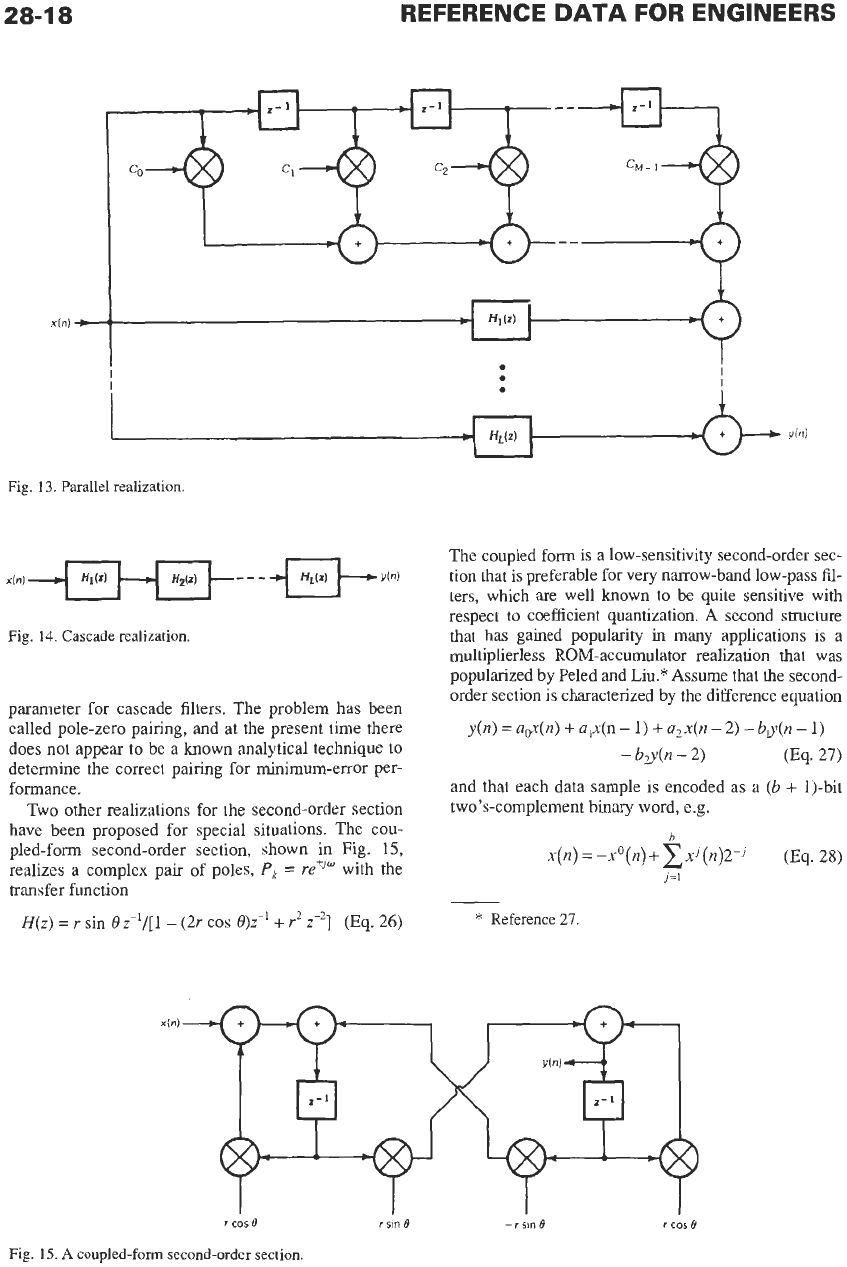
ond-order section (Fig.
12).
The canonical-form sec-
ond-order section requires two delay registers, five
multipliers, and four adders and is capable of realizing
a pair of complex poles and complex zeros with real-
valued multiplier coefficients.
It
is
well known that the
sensitivity of the zeros of a polynomial with respect to
incremental changes in the coefficients grows large
rapidly as the polynomial order increases. Therefore,
with respect to transfer function sensitivity and round-
off error accumulation,
it
is always preferable
to
decompose a high-order transfer function into lower-
order subsystems. This results in a parallel or cascade4
realization.
In
the parallel realization,
H(z)
is expanded as a par-
tial fraction expansion of the form
M-1
L
H(z)
=
~c~z-~
+xHi(z)
(Eq. 24)
k=O
j=l
where the first
M
terms are called the feed-forward
terms, and each
Hj(z)
has a first-order numerator and a
second-order denominator of the form
t
Reference
22.
$
Some
references call this
form
a “series” realization, al-
though “cascade”
is
now more commonly used.
DISCRETE-TIME SIGNAL PROCESSING
28-1
7
NORMALIZED FREQUENCY
f/fsa,,,pt,ng
Fig.
11.
Magnitude response
of
a 64th-order dual passband
FIR
digital filter.
Fig.
12.
Second-order section.
The network structure takes the form shown in Fig.
13.
The
ck's
result by dividing the denominator of
H(z)
into the numerator until the remainder is in proper
form to expand into partial fractions.
In
the cascade realization,
H(z)
is
factored into
numerator and denominator factors that are at most
second order, i.e.
H(z)
=
H~(z)
HZQ
. .
.
HL(Z)
(Eq.
25)
where each factor has the form
H~
(z)
=
(aoJ
+
a?,
Z-'
+
a,,
i2)/(1
+
b,
z-'
+
b,
2)
The cascade structure is shown in Fig.
14.
Both
the parallel and cascade structures
are
conve-
nient for multiplexing the hardware of one second-
order section. Also, in general, the two forms require
the same number of multiplications because the feed-
forward multiplies make
up
for the lower-order numer-
ators of the parallel second-order sections. In certain
types of filter functions (elliptic), it is found that
a,
=
a2,,
so
that one multiply can be eliminated. This fea-
ture, together with the fact that extra adders are
required at the output of the parallel structure, has
resulted in more popularity of the cascade structure.
The order
in
which the factors
in
Eq.
25
are imple-
mented, as well as the pairing of the numerator and
denominator factors, greatly affects quantization error
accumulation and represents an additional design
28-1
8
REFERENCE
DATA
FOR ENGINEERS
1
1
Fig.
13.
Parallel realization
Fig.
14.
Cascade realization.
parameter for cascade filters. The problem has been
called pole-zero pairing, and at the present time there
does not appear to be a known analytical technique to
determine the correct pairing for minimum-error per-
formance.
Two other realizations for the second-order section
have been proposed for special situations. The cou-
pled-form second-order section, shown in
Fig.
15,
realizes a complex pair of poles,
P,
=
reiJw
with the
transfer function
The coupled form is a low-sensitivity second-order sec-
tion that is preferable for very narrow-band low-pass fil-
ters, which are well known
to
be quite sensitive with
respect to coefficient quantization. A second structure
that has gained popularity in many applications is
a
multiplierless ROM-accumulator realization that was
popularized by Peled and Liu.* Assume that the second-
order section is characterized by the difference equation
y(n)
=
a&n)
+
a,x(n
-
1)
+
a,@
-
2)
-
bg(n
-
1)
-
bg(n
-
2)
(Eq.
27)
and that each data sample is encoded as a
(b
+
1)-bit
two’s-complement binary word, e.g.
h
x(n)
=
-x0(n)+xxJ(12)2-J
(Eq.
28)
j=1
H(z)
=
r
sin 0
z8/[
1
-
(2r
cos
0)z-l
+
r2
z-’]
(Eq.
26)
*
Reference 27
r
cos
B
r
sin
9
-
r
sin
8
r
cos
8
Fig. 15.
A
coupled-form second-order section.
DISCRETE-TIME
SIGNAL
PROCESSING
28-1
9
If Eq.
28
is used in
Eq.
27
for both the
x(n)’s
and the
y(n)’s
and
the
order of summations is interchanged, the
output
of
the section can be expressed as
whereA,(n)
=
x‘(n),
xJ(n
-
l),$(n
-
2),
yJ(n
-
l),
yJ(n
-
2)
is a five-bit binary address that is used
to
address the
stored function
+(A,(n))
=
a+’(n)
+
alx’(n
-
1)
+
a2xJ(n
-
2)
-
b,y’(n
-
1)
-
b,yJ(n
-
2)
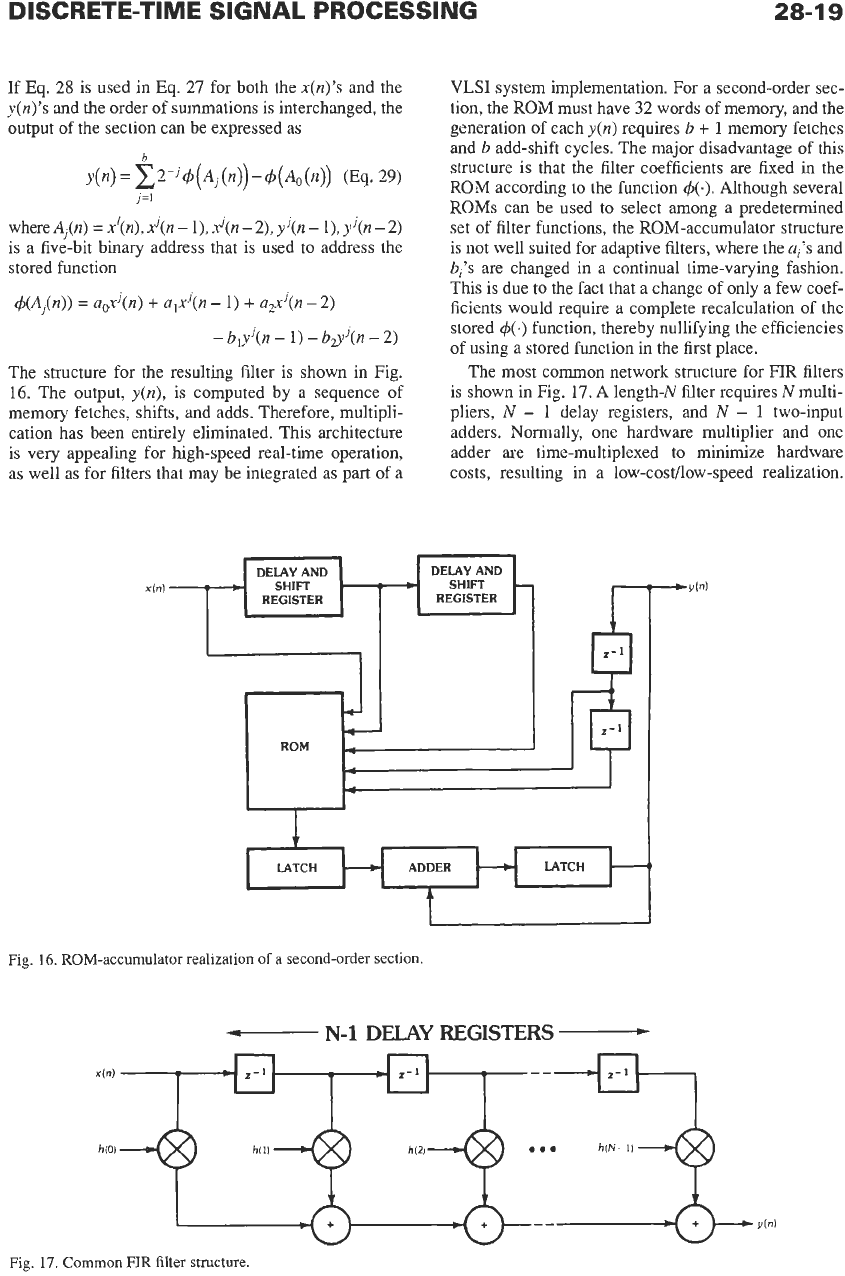
The structure for
the
resulting filter is shown in Fig.
16.
The output,
y(n),
is computed by a sequence of
memory fetches, shifts, and adds. Therefore, multipli-
cation has been entirely eliminated. This architecture
is very appealing for high-speed real-time operation,
as well as for filters that may be integrated as part
of
a
VLSI
system implementation. For a second-order sec-
tion, the ROM must have
32
words of memory, and the
generation of each
y(n)
requires
b
+
1
memory fetches
and
b
add-shift cycles. The major disadvantage
of
this
structure is that the filter coefficients are fixed
in
the
ROM according
to
the function
+(.).
Although several
ROMs can be used to select among a predetermined
set of filter functions, the ROM-accumulator structure
is not well suited for adaptive filters, where the
ai’s
and
bj’s
are
changed in a continual time-varying fashion.
This is due to the fact that a change of only a few coef-
ficients would require a complete recalculation of the
stored
+(.)
function, thereby nullifying the efficiencies
of using a stored function in the first place.
The most common network structure for FIR filters
is shown in Fig.
17.
A length-N filter requires
N
multi-
pliers,
N
-
1
delay registers, and N
-
1
two-input
adders. Normally, one hardware multiplier and one
adder are time-multiplexed to minimize hardware
costs, resulting
in
a low-costilow-speed realization.
DELAY AND DELAY AND
-
SHIFT
c
SHIFT
-
REGISTER REGISTER
x(n1
4-
-
ROM
*
4
Fig.
16.
ROM-accumulator realization
of
a second-order section.
N-1
DELAY
REGISTERS
-
Fig.
17.
Common FIR filter structure.
28-20
REFERENCE
DATA
FOR ENGINEERS
When higher speed is required, more computational
elements are used in
a
pipelined configuration, result-
ing in
a
high-speedhgh-cost realization. Since there is
no
feedback, limit cycles cannot occur, and quantiza-
tion error in the output is simply the additive result of
all the quantization error in the multipliers.
Finite Wordlength Effects
Three basic sources of quantization error occur in
digital filters: (1) errors due to quantizing an input sig-
nal
in
the A/D converter; (2) errors introduced by
rounding during arithmetic operations; and
(3)
errors
in the filter response due to a finite number of bits used
in the filter coefficients. The following describes quan-
tization in fixed-point systems.
Input
Error-Quantization that occurs in the AD
converter does not corrupt the filter itself, but rather
acts
as
an additive noise component at the input of the
ideal system. This noise cannot cause filter instabili-
ties, although it does create inaccuracy in the time-
domain response.
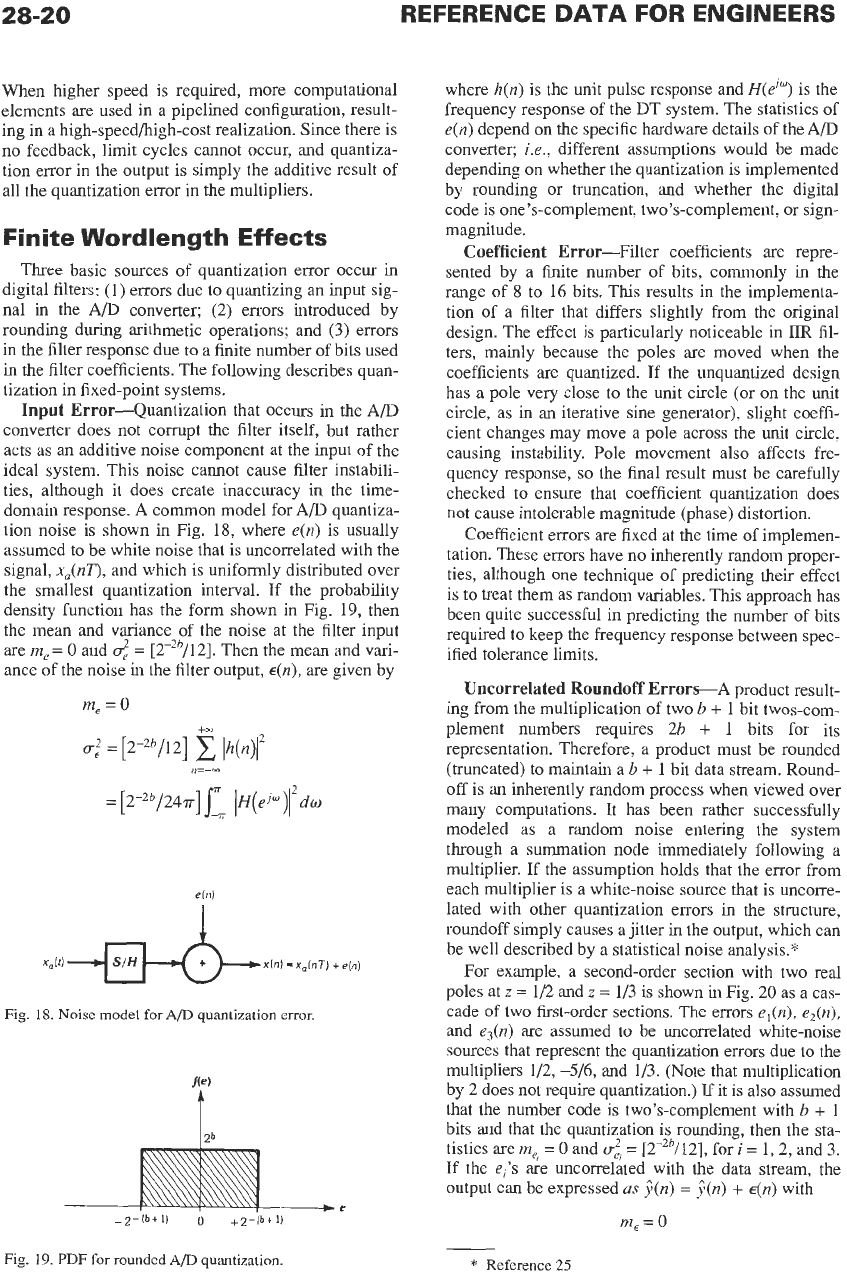
A
common model for A/D quantiza-
tion noise is shown
in
Fig. 18, where
e(n)
is usually
assumed to be white noise that is uncorrelated with the
signal,
x,(nT),
and which is uniformly distributed over
the smallest quantization interval. If the probability
density function has the form shown in Fig.
19,
then
the mean and variance of the noise at the filter input
are
m,
=
0
and
=
[2-2b/12]. Then the mean and vari-
ance
of
the noise in the filter output,
E@),
are given by
elnl
Fig.
18.
Noise
model
forA/D
quantization
error,
Fig.
19.
PDF
for
rounded
AD
quantization.
where
h(n)
is the
unit
pulse response and
H(d")
is the
frequency response of the
DT
system. The statistics of
e(n)
depend
on
the specific hardware details of the A/D
converter;
ie.,
different assumptions would be made
depending
on
whether the quantization is implemented
by rounding or truncation, and whether the digital
code is one's-complement, two's-complement, or sign-
magnitude.
Coefficient Error-Filter coefficients are repre-
sented by
a
finite number of bits, commonly in the
range of
8
to
16
bits. This results in the implementa-
tion of
a
filter that differs slightly from the original
design. The effect
is
particularly noticeable in
W
fil-
ters, mainly because the poles are moved when the
coefficients are quantized. If the unquantized design
has
a
pole very close to the unit circle (or
on
the
unit
circle,
as
in
an
iterative sine generator), slight coeffi-
cient changes may move
a
pole across the unit circle,
causing instability. Pole movement also affects fre-
quency response,
so
the final result must be carefully
checked to ensure that coefficient quantization does
not cause intolerable magnitude (phase) distortion.
Coefficient errors are fixed at the time of implemen-
tation. These errors have no inherently random proper-
ties, although one technique of predicting their effect
is to treat them
as
random variables. This approach has
been quite successful in predicting the number of bits
required to keep the frequency response between spec-
ified tolerance limits.
Uncorrelated Roundoff ErrorsA product result-
ing from the multiplication of
two
b
+
1
bit twos-com-
plement numbers requires 2b
+
1
bits for its
representation. Therefore, a product must be rounded
(truncated)
to
maintain
ab
+
1
bit data stream. Round-
off is an inherently random process when viewed over
many computations. It
has
been rather successfully
modeled
as
a random noise entering the system
through
a
summation node immediately following a
multiplier. If the assumption holds that the error from
each multiplier is a white-noise source that is uncorre-
lated with other quantization errors in the structure,
roundoff simply causes a jitter
in
the output, which can
be well described by a statistical noise analysis."
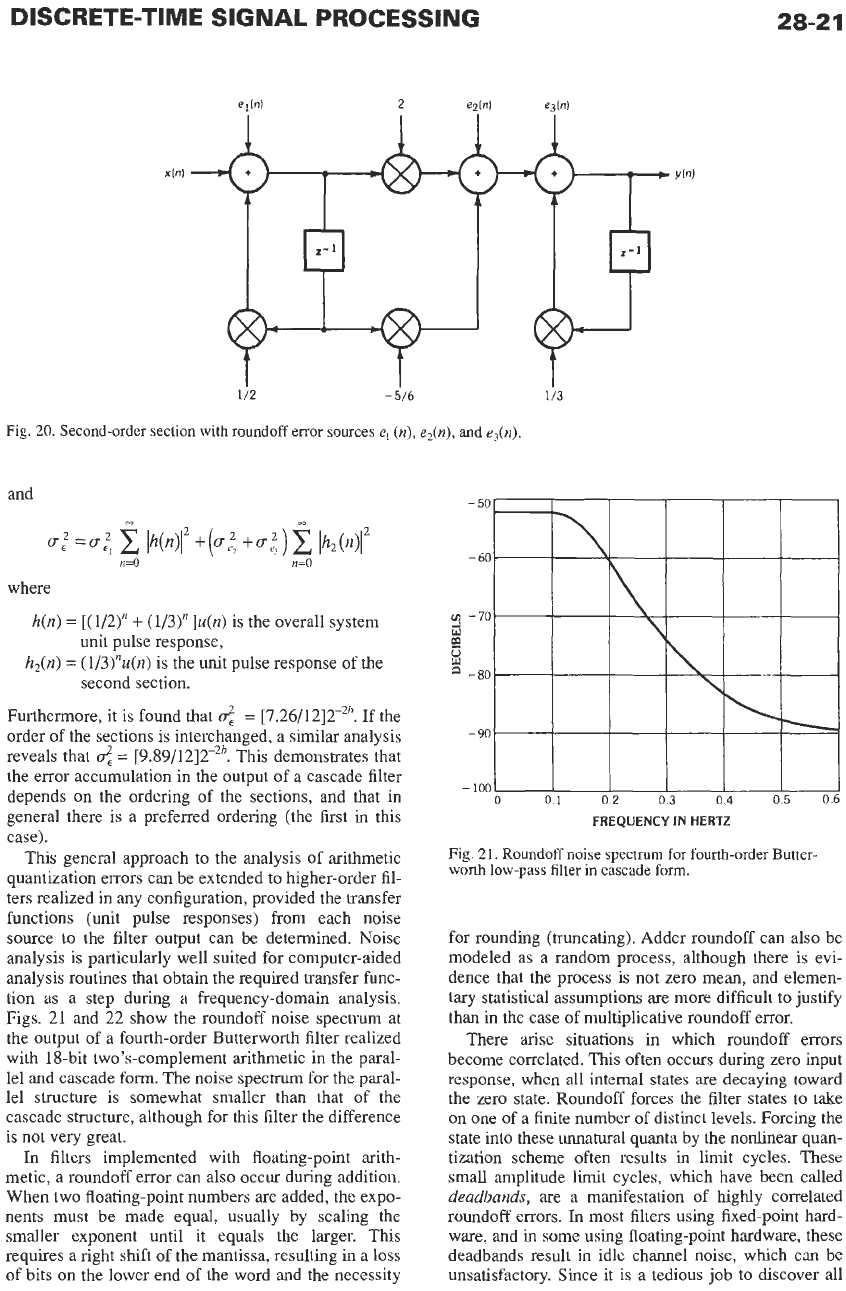
For example,
a
second-order section with two real
poles at
z
=
1/2 and
z
=
113 is shown
in
Fig.
20
as
a cas-
cade
of
two
first-order sections. The errors
el(n).
e2(n),
and
e&)
are assumed to be uncorrelated white-noise
sources that represent the quantization errors due to the
multipliers 1/2,
-5/6,
and 1/3. (Note that multiplication
by 2 does not require quantization.)
If
it is
also
assumed
that the number code is two's-complement with
b
+
1
bits and that the quantization is rounding, then the
sta-
tistics are
me,
=
0
and
crz
=
[2-Zb/12], fori
=
1,2, and 3.
If the
e,'s
are uncorrelated with
the
data stream, the
output can be expressed
as
j(n)
=
E(.)
+
~(n)
with
m,
=
0
*
Reference
25
DISCRETE-TIME SIGNAL PROCESSING
28-2
1
Fig.
20.
Second-order
and
n=O
11=0
where
h(n)
=
[(1/2)"
+
(1/3)"]u(n)
is the overall system
h,(n)
=
(1/3)'u(n)
is the unit pulse response of the
Furthermore, it is found that
d
=
[7.26/12]2-". If the
order of the sections
is
interchanged, a similar analysis
reveals that
d
=
[9.89/12]2-". This demonstrates that
the error accumulation in the output of a cascade filter
depends on the ordering of the sections, and that in
general there is a preferred ordering (the first in this
case).
This general approach to the analysis of arithmetic
quantization errors can be extended
to
higher-order fil-
ters realized in any configuration, provided the transfer
functions (unit pulse responses) from each noise
source to the filter output can be determined. Noise
analysis is particularly well suited for computer-aided
analysis routines that obtain the required transfer func-
tion as a step during a frequency-domain analysis.
Figs. 21 and 22 show the roundoff noise spectrum at
the output of a fourth-order Butterworth filter realized
with 18-bit two's-complement arithmetic in the paral-
lel and cascade
form.
The noise spectrum for the paral-
lel structure is somewhat smaller than that of the
cascade structure, although for this filter the difference
is not very great.
In
filters implemented with floating-point arith-
metic, a roundoff error can also occur during addition.
When two floating-point numbers are added, the expo-
nents must be made equal, usually by scaling the
smaller exponent until it equals the larger. This
requires a right shift of the mantissa, resulting in a loss
of
bits on the lower end of the word and the necessity
unit pulse response,
second section.
0
01
02
03
04
05
06
FREQUENCY
IN
HERTZ
Fig.
21.
Roundoff
noise
spectrum for fourth-order Butter
worth
low-pass filter in cascade
form.
for rounding (truncating). Adder roundoff can also be
modeled as a random process, although there is evi-
dence that the process is not zero mean, and elemen-
tary
statistical assumptions are more difficult to justify
than in the case of multiplicative roundoff error.
There arise situations in which roundoff errors
become correlated. This often occurs during zero input
response, when
all
internal states are decaying toward
the zero state. Roundoff forces the filter states to take
on one of a finite number of distinct levels. Forcing the
state into these unnatural quanta by the nonlinear quan-
tization scheme often results in limit cycles. These
small amplitude limit cycles, which have been called
deadbands,
are a manifestation of highly correlated
roundoff errors.
In
most filters using fixed-point hard-
ware, and in some using floating-point hardware, these
deadbands result in idle channel noise, which can be
unsatisfactory. Since it is a tedious job
to
discover
all