Руководство ООО Сименс, Расширенное программирование SINUMERIK 840D
Подождите немного. Документ загружается.

Фреймы
6.2 Присвоение значение фрейм-переменным/фреймам
Программиро-
вание
Присвоение фреймов
DEF
FRAME
EINSTELLUNG1
EINSTELLUNG1=CTRANS(X,10)
$P_PFRAME=EINSTELLUNG1
DEF
FRAME
EINSTELLUNG4
EINSTELLUNG4=$P_PFRAME
$P_PFRAME=EINSTELLUNG4
Цепочки фреймов
Актуальному программируемому фрейму
присваиваются значения самостоятельно
определенного фрейма
EINSTELLUNG1.
Актуальный программируемый фрейм
архивируется и при необходимости
снова разархивируется.
Фреймы связываются друг с другом в запрограммированной последовательности,
компоненты фрейма, к примеру, смещения, вращения и т.п. выполняются
последовательно.
$P_IFRAME
=
$P_UIF
R[15]:$
P_UIF
R[16]
$P_
U
IFR[3]=$P_UIFR[4]:$P_
UIFR[5]
$P_UIF
R[15] содержит, к примеру,
данные для смещений нулевой точки.
После
– в продолжении
–
обрабатываются данные
$P_
UIFR[16], к примеру, данные для
вращений.
Устанавливаемый фрейм 3
создается посредством соединения
фреймов 4 и 5.
Указание
Учитывать, что фреймы должны быть соединены друг с другом связывающим
оператором "двоеточие":
Расширенное программирование
6-14 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком
Фреймы
6.2 Присвоение значение фрейм-переменным/фреймам
6.2.4 Определение новых фреймов (DEF FRAME)
Функция
Наряду с уже описанными, предопределенными, устанавливаемыми фреймами
существует возможность создания новых фреймов. При этом речь идет о переменных
типа FRAME, которым присваивается произвольное имя.
С помощью функций CTRANS, CROT, CSCALE, CMIRROR фреймам в программе ЧПУ
могут быть присвоены значения.
Программиро-
вание
DEF FRAME PALETTE1
или
PALETTE1=CTRANS(...):CROT(...)...
Параметры
DEF
FRAME
Создание нового фрейма.
PALETTE1
Имя нового фрейма
=CTRANS(...):
CROT(...)...
Присвоение значений возможным функциям
6.2.5 Определение вращений фреймов (ROT, ROTS, TOFRAME, TOROT, PAROT)
Функция
Ориентации в пространстве могут определяться специфически для приложения через
вращения фрейма.
Параметры
ROT
Отдельные вращения для всех гео-осей
ROTS,
AROTS,
CROTS
Вращение через указание пространственного угла (макс.
2);
см.
Описание в
/FB1/
K2:
Системы координат.
TOFRAME
Вращение через фрейм
"TOFRAME",
ось
Z которого
показывает в направлении инструмента.
TOROT
Вращение через фрейм
"TOROT",
который только переписывает
долю вращения уже запрограммированных фреймов
PAROT
Относящееся к детали вращение фрейма.
Доля вращения
определяется через долю вращения ориентируемого
инструментального суппорта.
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
6-15
Не для продажи
со станком
Фреймы
6.3 Грубое и точное смещение (CFINE; CTRANS)
6.3
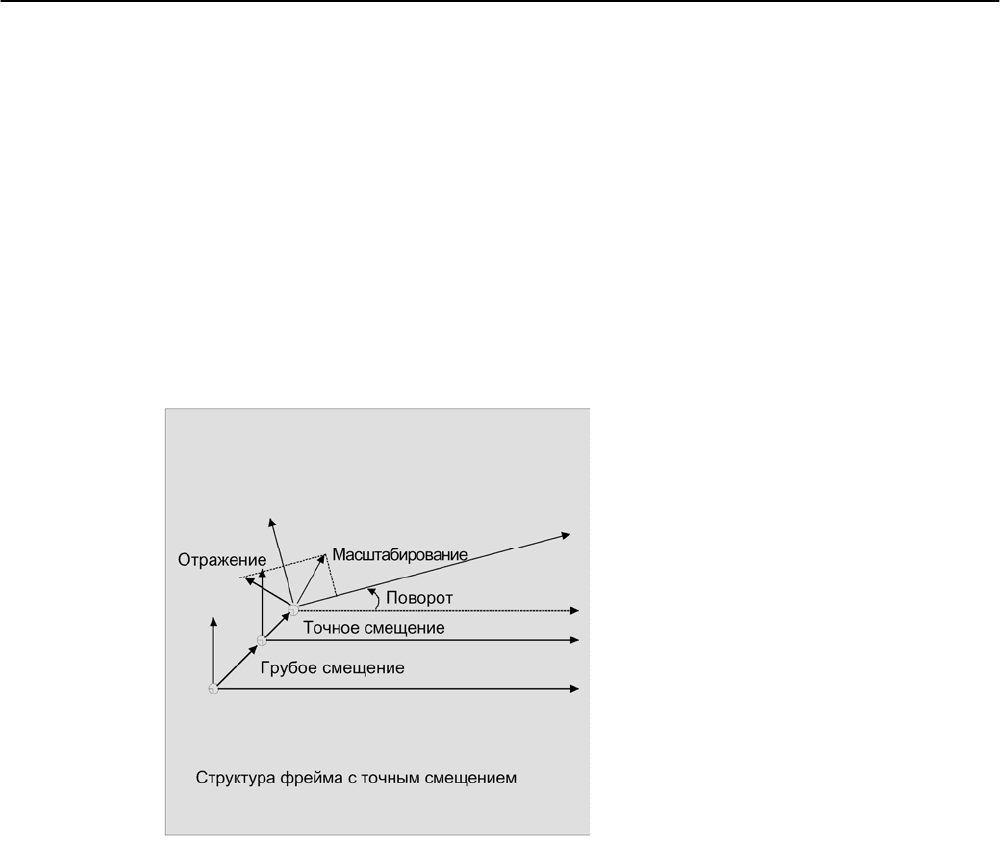
Грубое и точное смещение (CFINE; CTRANS)
Функция
Точное смещение
С помощью команды CFINE(X, ...,Y ...) можно запрограммировать точное
смещение базового фрейма и всех устанавливаемых фреймов.
Точное смещение возможно только при MD18600:
M_
FRAME
_
FINE
_
TRANS=1.
Грубое смещение
С помощью CTRANS(...) определяется грубое смещение.
6SLHJHOXQJ
6NDOLHUXQJ
5RWDWLRQ
)HLQYHUVFKLHEXQJ
*UREYHUVFKLHEXQJ
)UDPHVWUXNWXU
PLW
)HLQYHUVFKLHEXQJ
Грубое и точное смещение складываются в общее смещение.
Расширенное программирование
6-16 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком
;соединение смещения,
;весь фрейм перезаписывается с CFINE
Фреймы
6.3 Грубое и точное смещение (CFINE; CTRANS)
Программирование
$P_UBFR=CTRANS(x, 10) : CFINE(x, 0.1)
: CROT(x, 45)
;точного смещения и вращения
$P_UIFR[1]=CFINE(x, 0.5 y, 1.0, z,
0.1)
;вкл. грубое
;смещение
Доступ к отдельным компонентам точного смещения выполняется через
указание компонента FI (смещение точное).
DEF REAL FINEX
;определение переменной FINEX
FINEX=$P_UIFR[$P_UIFNUM, x, FI]
;считывание точного смещения
;через переменную FINEX
FINEX=$P_UIFR[3, x, FI]$P
;считывание точного смещения
;оси Х в 3-ьем фрейме
;через переменную FINEX
Параметры
CFINE(x,
значение,
y,
значение,
z,
значение
)
Точное смещение для нескольких осей.
Аддитивное
смещение.
CTRANS(x,
значение,
y,
значение,
z,
значение
)
Грубое смещение для нескольких осей.
Абсолютное смещение.
x
y
z
Смещение нулевой точки осей
(макс.
8)
Значение
Доля смещения
Изготовитель станка
С помощью MD18600: MM
_
FR
AME_FI
NE
_T
RANS можно сконфигурировать следующие
варианты точного смещения:
0:
Точное смещение не может быть введено или запрограммировано. G58 и G59
невозможны.
1:
Точное смещение для устанавливаемых фреймов, базовых фреймов, программируемых
фреймов, G58 и G59 могут использоваться.
Описание
Измененное через управление HMI точное смещение начинает действовать только
после активации соответствующего фрейма, т.е. активация выполняется через G500,
G54...G599. Активированное точное смещение фрейма остается активным до тех пор,
пока активен фрейм.
Программируемый фрейм не имеет доли точного смещения. Если программируемому
фрейму присваивается фрейм с точным смещением, то его общее смещение образуется
из суммы грубого и точного смещения. При чтении программируемого фрейма точное
смещение всегда равно нулю.
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
6-17
Не для продажи
со станком

Фреймы
6.4 Смещение DRF
6.4
Смещение DRF
Смещение с помощью маховичка, DRF
В дополнение ко всем рассмотренным в этой главе смещениям, могут
быть определены смещения нулевой точки через маховичок (смещение DRF).
Смещение DRF действует в базовой кинематической системе на гео- и дополнительные
оси:
=
%.6
=
%16
<
%16
<
%.6
%DVLVIUDPH
'5)
H[WHUQH
139
;
%16
;
%.6
Но согласование маховичка должно быть выполнено для оси станка (к примеру, через
интерфейсные сигналы ЧПУ/PLC "Активировать маховичок"), на которые отображается
гео- и дополнительная ось. Подробности см. соответствующее руководство оператора.
Удаление смещения DRF, DRFOF
С помощью DRFOF смещение маховичком для всех согласованных с каналом
осей удаляется. DRFOF стоит в отдельном кадре ЧПУ.
Расширенное программирование
6-18 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком
Фреймы
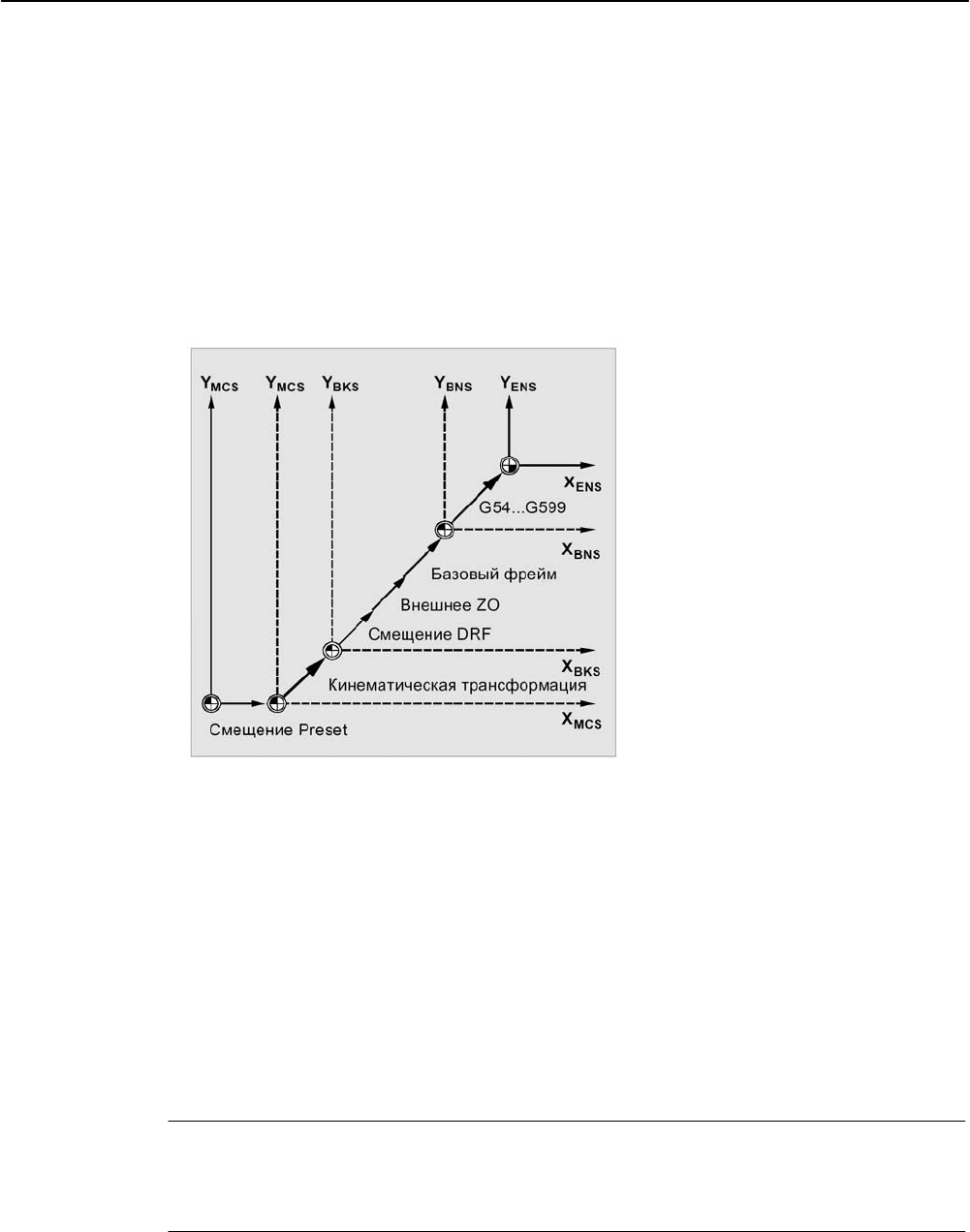
6.5 Внешнее смещение нулевой точки
6.5
Внешнее смещение нулевой точки
Функция
Здесь существует дополнительная возможность смещения нулевой точки между
базовой кинематической системой и системой координат детали.
При внешнем смещении нулевой точки могут программироваться только линейные
смещения.
<
0.6
<
0.6
<
%.6
<
%16
<
(16
;
(16
*
*
%DVLVIUDPH
;
%16
([WHUQH
1XOOSXQNWYHUVFKLHEXQJ
'5)
9HUVFKLHEXQJ
.LQHPDWLVFKH
7UDQVIRUPDWLRQ
3UHVHW
9HUVFKLHEXQJ
;
%.6
;
0.6
Программиро-
вание
Программирование значений смещения,
$AA_ET
RANS выполняется через
присвоение значений спец. для оси системной переменной.
Присвоение значения смещения
$AA_ETRANS[ось]=RI
RI это R-переменная типа REAL, содержащая новое значение.
Внешнее смещение, как правило, не указывается в программе обработки детали, а
устанавливается с PLC.
Указание
Записанное в программе обработки детали значение начинает действовать только
после установки соответствующего сигнала на интерфейсе VDI
(интерфейс NCU-PLC).
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
6-19
Не для продажи
со станком
Фреймы
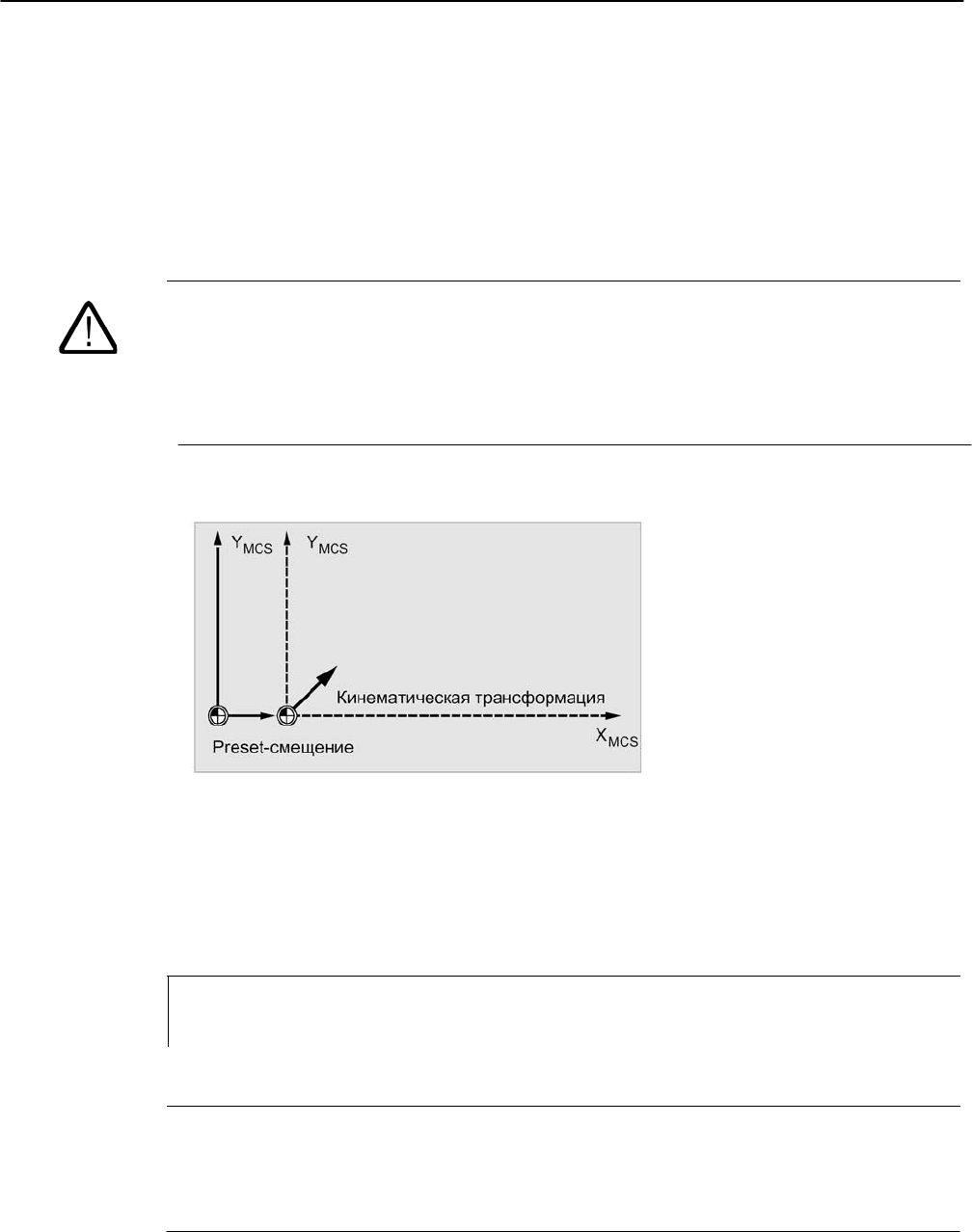
6.6 Смещение Preset (PRESETON)
6.6
Смещение Preset (PRESETON)
Функция
Для специальных приложений может потребоваться присвоение одной или
нескольким осям на актуальной позиции (в состоянии покоя) нового,
запрограммированного фактического значения.
Осторожно
После функции PRESETON референтная точка становится недействительной. Поэтому
эта функция должна использоваться только для осей без обязательного
реферирования. Для восстановления первоначальной системы выполнить с помощью
G74 подвод к референтным точкам
– см. главу
"Управление файлами и программами".
<
0.6
<
0.6
.LQHPDWLVFKH
7UDQVIRUPDWLRQ
3UHVHW
9HUVFKLHEXQJ
;
0.6
Программиро-
вание
PRESETON(ось, значение,...)
Параметры
PRESETON
Установка фактического значения
Ось
Указание оси станка
Значение
Новое фактическое значение, которое должно действовать для
указанной оси
Указание
Установка фактического значения с синхронными действиями должна выполняться
только с кодовым словом "WHEN" или "EVERY".
Расширенное программирование
6-20 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком

Фреймы
6.7 Деактивация фреймов (DRFOF, G53, G153 и SUPA)
Пример
Значения присваиваются в системе координат станка
– они относятся к осям станка
.
N10 G0 A760
N20 PRESETON(A1,60)
Ось A движется на позицию 760. Ось станка A1 получает на позиции 760 новое
фактическое значение 60. С этого момента позиционирование выполняется в новой
системе фактического значения.
6.7
Деактивация фреймов (DRFOF, G53, G153 и SUPA)
Функция
Удаление программируемых фреймов выполняется через присвоение
"нулевого фрейма" (без указания оси) программируемому фрейму.
Программиро-
вание
DRFOF
или
G53
или
G153
или
SUPA
Параметры
DRFOF
Отключение (удаление) смещений маховичком
(DRF)
G53
Покадровое отключение программируемых и всех
устанавливаемых фреймов
G153
Покадровое отключение программируемого фрейма,
базового фрейма и всех устанавливаемых фреймов
SUPA
Покадровое отключение всех программируемых фреймов,
базового фрейма, всех устанавливаемых фреймов и
смещений маховичком
(DRF)
Пример присвоения нулевого фрейма
$P_PFRAME=TRANS( )
$P_PFRAME=ROT( )
$P_PFRAME=SCALE( )
$P_PFRAME=MIRROR( )
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
6-21
Не для продажи
со станком
Фреймы
6.8 Вычисление фрейма из 3 точек измерения в пространстве (MEAFRAME)
6.8
Вычисление фрейма из 3 точек измерения в пространстве
(MEAFRAME)
Функция
MEAFRAME это расширение языка 840D для поддержки циклов измерения. Функция
MEAFRAME вычисляет фрейм из трех идеальных и сопряжено измеренных точек.
Если деталь позиционируется для обработки, то ее позиция относительно декартовой
системы координат станка по умолчанию как смещена, так и повернута по отношению
к ее идеальной позиции. Для точной обработки или измерения необходима либо
дорогостоящая физическая юстировка, либо изменение движений в программе
обработки детали.
Фрейм может быть определен через сканирование трех точек в пространстве, идеальные
позиции которых известны. Сканирование выполняется посредством контактного или
оптического сенсора, который касается точно зафиксированных на несущей плите
отверстий или измерительных сфер.
Программиро-
вание
MEAFRAME IDEAL_POINT,MEAS_POINT,FIT_QUALITY)
Параметры
MEAFRAME
Вычисление фрейма из 3 точек измерения в пространстве
IDEAL_POINT
2-мерное
поле Real, содержащее три координаты идеальных точек
MEAS_POINT
2-мерное
поле Real, содержащее три координаты измеренных точек
FIT_QUALITY
Переменная Real,
-1:
-2:
-4:
положительное
значение:
возвращающая следующую информацию:
Идеальные точки располагаются практически на одной
прямой:вычисление фрейма невозможно.
Возвращенная
фрейм-переменная содержит нейтральный фрейм.
Точки измерения располагаются практически на одной
прямой: вычисление фрейма невозможно. Возвращенная
фрейм-переменная содержит нейтральный фрейм.
Вычисление матрицы вращения не удалось по иной
причине.
Сумма искажений
(интервалы между
точками),
необходимая для преобразования измеренного
треугольника в конгруэнтный идеальному треугольник.
Расширенное программирование
6-22 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком
Фреймы
6.8 Вычисление фрейма из 3 точек измерения в пространстве (MEAFRAME)
Указание
Качество измерения
Для того чтобы измеренные координаты могли бы быть согласованы с идеальными
координатами с комбинированным вращением/смещением, образованный точками
измерения треугольник должен быть конгруэнтен идеальному треугольнику. Это
осуществляется посредством алгоритма компенсации, минимизирующего сумму
квадратных погрешностей, преобразующих измеренный треугольник в идеальный.
Эффективное необходимое искажение точек измерения может служить индикатором
качества измерения и поэтому выводится в качестве дополнительной переменной
MEAFRAME.
Указание
Созданный MEAFRAME фрейм посредством функции ADDFRAME может быть
преобразован в другой фрейм в цепочке фреймов.
См. пример: Соединение фреймов "Соединение с ADDFRAME".
Прочую информацию по параметрам ADDFRAME(FRAME, STRING) см.
/FB1/ Описание функция Основные функции; оси, системы координат, фреймы (K2),
глава "Цепочка фреймов"
Пример
;программа обработки детали 1
;
DEF FRAME CORR_FRAME
;
;установка точек измерения
DEF REAL IDEAL_POINT[3,3] = SET(10.0,0.0,0.0, 0.0,10.0,0.0,
0.0,0.0,10.0)
DEF REAL MEAS_POINT[3,3] = SET
(10.1,0.2,-0.2, -0.2,10.2,0.1, -0.2,0.2,9.8) ;для теста
DEF REAL FIT_QUALITY = 0
;
DEF REAL ROT_FRAME_LIMIT = 5 ;разрешен поворот позиции детали макс.
;на 5 градусов
DEF REAL FIT_QUALITY_LIMIT = 3 ;разрешено макс. 3 мм смещения между
;идеальным и измеренным треугольником
DEF REAL SHOW_MCS_POS1[3]
DEF REAL SHOW_MCS_POS2[3]
DEF REAL SHOW_MCS_POS3[3]
;=======================================================
;
N100 G01 G90 F5000
N110 X0 Y0 Z0
;
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
6-23
Не для продажи
со станком