Руководство. Основы, Справочник по программированию Sinumerik 840D (new)
Подождите немного. Документ загружается.

Регулирование подачи
7.1 Подача (G93, G94, G95, F, FGROUP, FL, FGREF)
Основы
Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
111
Пример 2: Перемещение синхронных осей с предельной скоростью FL
Скорость движения по траектории траекторных осей уменьшается, если синхронная
ось Z достигает предельной скорости.
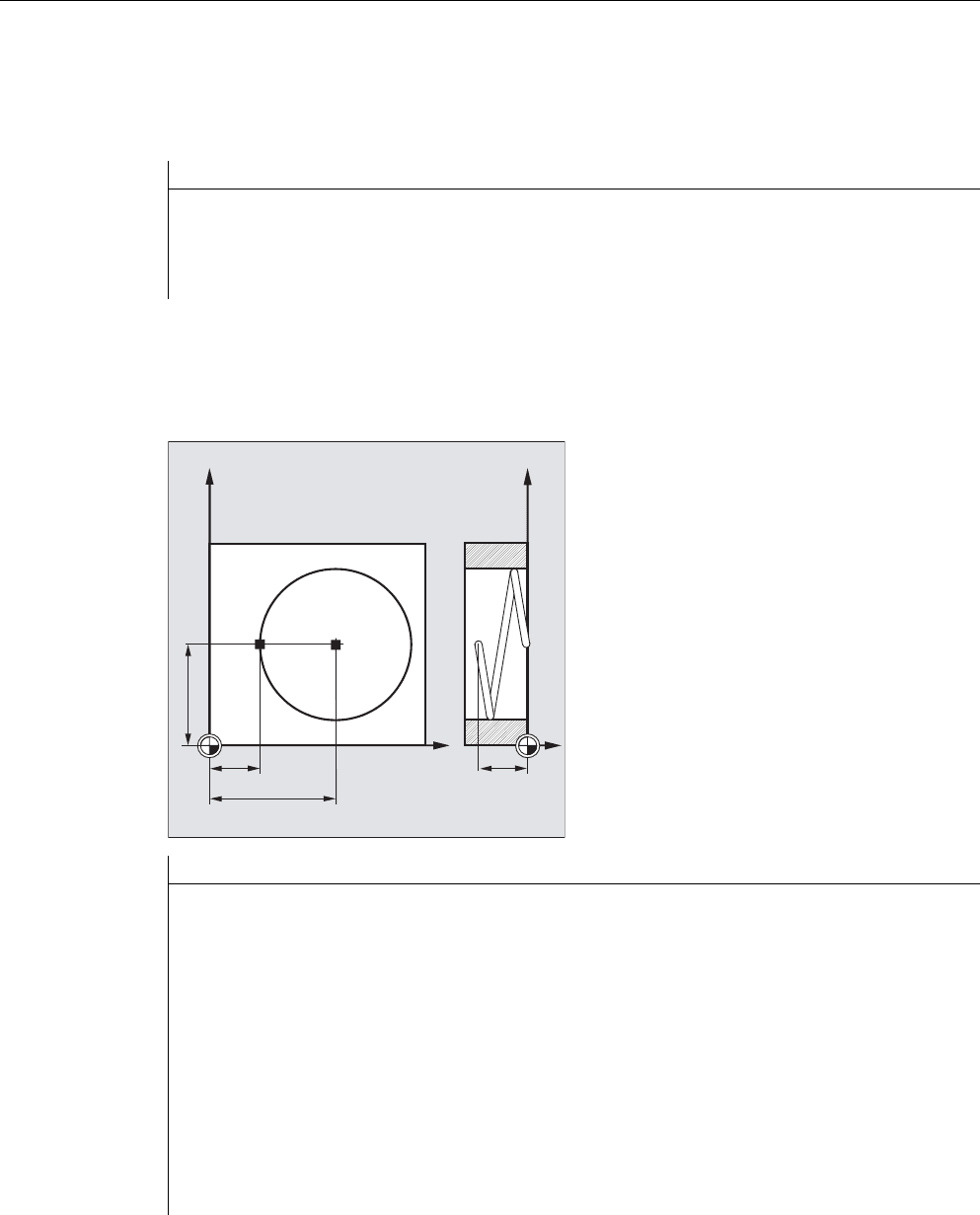
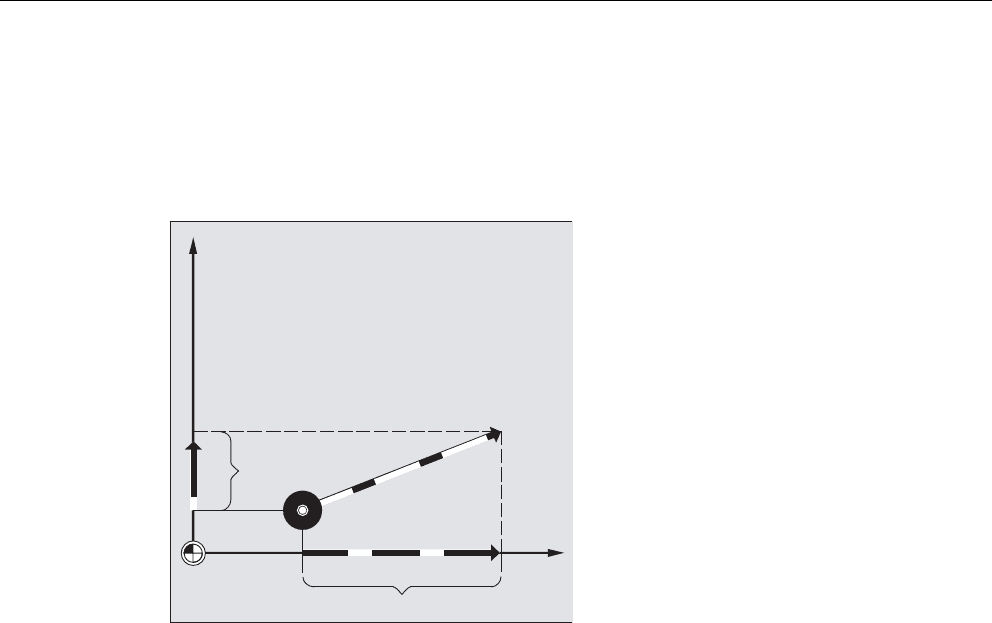
Пример 3: Винтовая интерполяция
Траекторные оси X и Y двигаются с запрограммированной подачей, ось подачи Z
является синхронной осью.
Программный код
N10 G0 X0 Y0
N20 FGROUP(X)
N30 G1 X1000 Y1000 G94 F1000 FL[Y]=500
N40 Z-50
Программный код Комментарий
N10 G17 G94 G1 Z0 F500 ; Подача инструмента.
N20 X10 Y20 ; Подвод к стартовой позиции.
N25 FGROUP(X,Y) ; Оси X/Y это траекторные оси,
Z это синхронная ось.
N30 G2 X10 Y20 Z-15 I15 J0 F1000 FL[Z]=200 ; На круговой траектории
действует подача 1000 мм/мин,
перемещение в направлении Z
осуществляется синхронно.
...
N100 FL[Z]=$MA_AX_VELO_LIMIT[0,Z] ; Через считывание скорости из
MD предельная скорость
отключается, считывание
значения из MD.
N110 M30 ; Конец программы
;
<
=
<
Регулирование подачи
7.1 Подача (G93, G94, G95, F, FGROUP, FL, FGREF)
Основы
112 Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
Дополнительная информация
Скорость подачи для траекторных осей (F)
Обычно подача по траектории складывается из отдельных компонентов скорости всех
участвующих в движении геометрических осей и относится к центру фрезы или к
острию токарного резца.
Скорость подачи указывается по адресу F. В зависимости от предустановки в
машинных данных действуют определенные через команды G единицы измерения в
мм или дюймах.
На кадр ЧПУ может быть запрограммировано одно значение F. Единица скорости
подачи определяется через одну из G-команд G93/G94/G95. Подача F воздействует
только на траекторные оси и действует до тех пор, пока не будет запрограммировано
новое значение подачи. После адреса F допускаются разделительные символы.
Примеры:
F100 или F 100
F.5
F=2*FEED
Тип подачи (G93/G94/G95)
G-команды G93, G94 и G95 действуют модально. Если выполняется переключение
между G93, G94 и G95, то необходимо заново запрограммировать значение подачи по
траектории. Для обработки с круговыми осями подача может указываться и в градусах/
мин.
̫͉͏͍͔͌͏͉͌<
̫͉͏͍͔͌͏͉͌;
;
<
)
Регулирование подачи
7.1 Подача (G93, G94, G95, F, FGROUP, FL, FGREF)
Основы
Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
113
Обратная по времени подача (G93)
Обратная по времени подача указывает продолжительность прохода одного кадра.
Единица: 1/мин
Пример:
N10 G93 G01 X100 F2
Означает: запрограммированный ход траектории проходится за 0,5 мин.
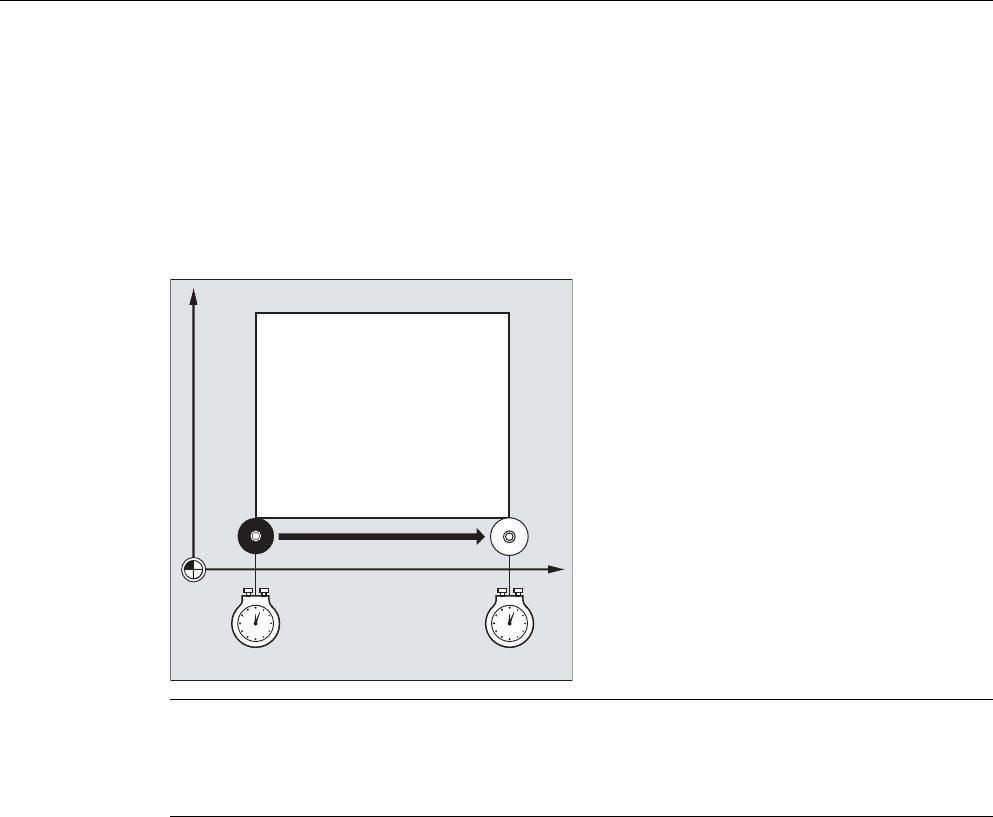
Подача для синхронных осей
Запрограммированная по адресу F подача действует для всех запрограммированных в
кадре траекторных осей, но не для синхронных осей. Управление синхронными осями
осуществляется таким образом, что им для их перемещения необходимо то же время,
что и для траекторных осей и все оси достигают их конечной точки в одно и то же
время.
Предельная скорость для синхронных осей (FL)
С помощью команды FL для синхронных осей может быть запрограммирована
предельная скорость. Если FL не программируется, то действует скорость ускоренного
хода. Отключение FL осуществляется присвоением MD (MD36200
$MA_AX_VELO_LIMIT).
;
<
*;)
͓͏͔
Примечание
Если длины траектории от кадра к кадру сильно различаются, то для G93 в каждом
кадре должно быть определено новое значение F. Для обработки с круговыми осями
подача может указываться и в градусах/мин.

Регулирование подачи
7.1 Подача (G93, G94, G95, F, FGROUP, FL, FGREF)
Основы
114 Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
Перемещение траекторной оси как синхронной оси (FGROUP)
С помощью FGROUP определяется, должна ли траекторная ось перемещаться с
подачей по траектории или как синхронная ось. При винтовой интерполяции можно, к
примеру, установить, что только две геометрические оси X и Y должны перемещаться с
запрограммированной подачей. В этом случае ось подачи Z была бы синхронной осью.
Пример: FGROUP(X,Y)
Изменить FGROUP
Изменить сделанную с FGROUP установку можно:
1. через повторное программирование FGROUP: к примеру, FGROUP(X,Y,Z)
2. через программирование FGROUP без указания оси: FGROUP()
После FGROUP() действует установленное в машинных данных исходной
состояние. Гео-оси теперь снова движутся в структуре траекторных осей.
Единицы измерения для подачи F
С помощью G-команд G700 и G710 дополнительно в геометрическим данным
определяется и система единиц для подач F, т.е.:
•для G700: [дюймов/мин]
•для G710: [мм/мин]
Единица измерения для синхронных осей с предельной скоростью FL
Установленная для F через G-команду G700/G710 единица измерения действует и для
FL.
Примечание
Идентификаторами осей для FGROUP должны быть имена осей канала.
Примечание
G70/G71не влияют на данные подачи.
Регулирование подачи
7.1 Подача (G93, G94, G95, F, FGROUP, FL, FGREF)
Основы
Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
115
Единица измерения для круговых и линейных осей
Для линейных и круговых осей, которые связаны друг с другом через FGROUP и вместе
движутся по траектории, действует подача в единице измерения линейных осей. В
зависимости от предустановки с G94/G95 в мм/мин или дюймов/мин или мм/оборот или
дюймов/оборот.
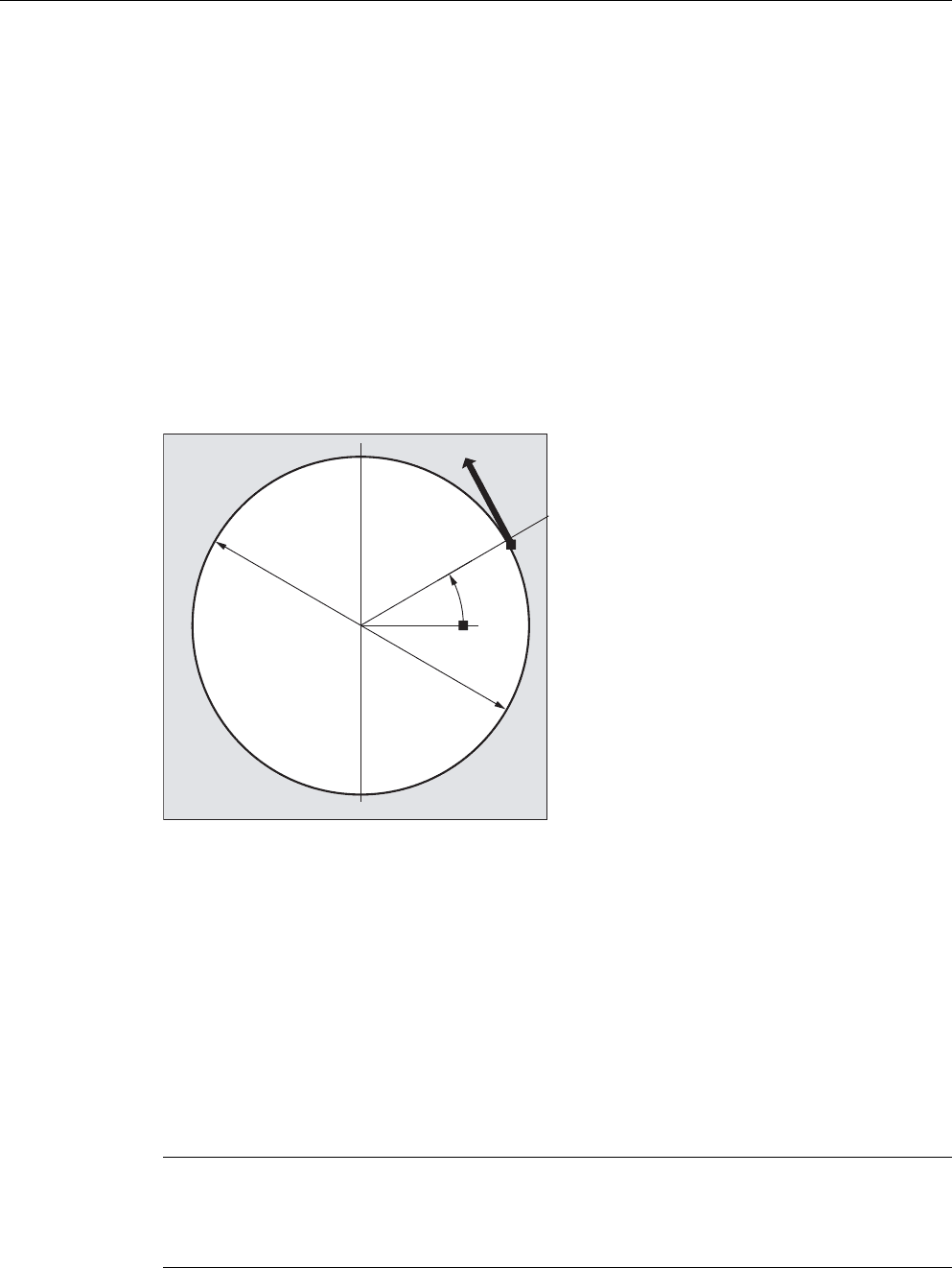
Тангенциальная скорость круговой оси в мм/мин или дюймов/мин вычисляется по
формуле:
F[мм/мин] = F'[градусов/мин] * π * D[мм] / 360[градусов]
Перемещение круговых осей со скоростью движения по траектории F (FGREF)
Для процессов обработки, при которых инструмент или деталь или обе приводятся в
движение круговой осью, должна существовать возможность программирования
эффективной подачи обработки как подачи по траектории через значение F. Для этого
для каждой из участвующих круговых осей должен быть указан эффективный радиус
(исходный радиус).
Единица исходного радиуса зависит от установки G70/G71/G700/G710.
Чтобы способствовать вычислению подачи по траектории, все участвующие оси
должны быть включены в команду FGROUP.
Для поддержания совместимости с процессами без программирования FGREF, после
пуска системы и при RESET действует нормирование 1 градус = 1 мм. Это
соответствует исходному радиусу FGREF=360 мм / (2π) = 57.296 мм.
где: F: тангенциальная скорость
F': угловая скорость
π: постоянная окружности
D: диаметр
D
F
F'
Примечание
Эта предустановка не зависит от активной основной системы
(MD10240$MN_SCALING_SYSTEM_IS_METRIC) и от актуальной действующей
установки G70/G71/G700/G710.

Регулирование подачи
7.1 Подача (G93, G94, G95, F, FGROUP, FL, FGREF)
Основы
116 Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
Особенности:
При этом программировании запрограммированное значение F в N110 нормируется как
подача круговой оси в градусах/мин, в то время как нормированием подачи в N120 в
зависимости от актуальной действующей установки G70/G71/G700/G710 является либо
100 дюймов/мин или 100 мм/мин.
Чтение исходного радиуса
Значение исходного радиуса круговой оси может быть считано через системные
переменные:
• В синхронных действиях или с остановкой предварительной обработки в программе
обработки детали через системные переменные:
• Без остановки предварительной обработки в программе обработки детали через
системные переменные:
Если значения не запрограммированы, то в обеих переменных для круговых осей
считывается предустановка 360мм /(2π)=57.296мм (соответствует 1мм на градус).
Для линейных осей в обеих переменных всегда считывается значение 1мм.
Программный код
N100 FGROUP(X,Y,Z,A)
N110 G1 G91 A10 F100
N120 G1 G91 A10 X0.0001 F100
ВНИМАНИЕ
Нормирование FGREF действует и тогда, когда в кадре запрограммированы только
круговые оси. Обычная интерпретация значения F в градусах/мин действует в этом
случае только тогда, когда отношение радиуса соответствует предварительной
установке FGREF:
•для G71/G710: FGREF[A]=57.296
•для G70/G700: FGREF[A]=57.296/25.4
$AA_FGREF[<ось>] Актуальное значение главного хода
$PA_FGREF[<ось>] Запрограммированное значение

Регулирование подачи
7.1 Подача (G93, G94, G95, F, FGROUP, FL, FGREF)
Основы
Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
117
Чтение определяющих скорость траекторных осей
Участвующие в траекторной интерполяции оси могут считываться через системные
переменные:
• В синхронных действиях или с остановкой предварительной обработки в программе
обработки детали через системные переменные:
• Без остановки предварительной обработки в программе обработки детали через
системные переменные:
Коэффициенты соотношения траекторий для осей ориентации с FGREF
Для осей ориентации принцип действия коэффициентов FGREF[] зависит от того,
осуществляется ли изменение ориентации инструмента через интерполяцию круговой
оси или векторную интерполяцию.
При интерполяции круговой оси соответствующие коэффициенты FGREF осей
ориентации учитываются как для круговых осей по отдельности как исходный радиус
для хода осей.
При векторной интерполяции активируется эффективный коэффициент FGREF,
который определяется как геометрическое среднее значение из отдельных
коэффициентов FGREF:
FGREF[эфф.] = n-ный корень из:[(FGREF[A] * FGREF[B]...)]
$AA_FGROUP[<ось>] Выводит значение "1", если указанная ось через
первичную установку или через программирование
FGROUP влияет на скорость движения по траектории
в актуальном кадре главного хода. Если нет, то
переменная выводит значение "0".
$AC_FGROUP_MASK Выводит битовый ключ запрограммированных с
FGROUP осей канала, которые должны
содействовать скорости движения по траектории.
$PA_FGROUP[<ось>] Выводит значение "1", если указанная ось через
первичную установку или через программирование
FGROUP влияет на скорость движения по траектории.
Если нет, то переменная выводит значение "0".
$P_FGROUP_MASK Выводит битовый ключ запрограммированных с
FGROUP осей канала, которые должны
содействовать скорости движения по траектории.
где: A: идентификатор 1-ой оси ориентации
B: идентификатор 2-ой оси ориентации
C: идентификатор 3-ей оси ориентации
n: Число осей ориентации
Регулирование подачи
7.1 Подача (G93, G94, G95, F, FGROUP, FL, FGREF)
Основы
118 Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
Пример:
Для стандартной 5-осевой трансформации существует две оси ориентации и тем
самым эффективный коэффициент как корень из результата двух осевых
коэффициентов:
FGREF[эфф.] = квадратный корень из:[(FGREF[A] * FGREF[B])]
Примечание
С помощью эффективного коэффициента для осей ориентации FGREF может быть
определена исходная точка на инструменте, к которой относится
запрограммированная подача по траектории.

Регулирование подачи
7.2 Перемещение позиционирующих осей (POS, POSA, POSP, FA, WAITP, WAITMC)
Основы
Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
119
7.2 Перемещение позиционирующих осей (POS, POSA, POSP, FA,
WAITP, WAITMC)
Функция
Позиционирующие оси перемещаются независимо от траекторных осей со своей
специфической для оси подачей. Команды интерполяции не действуют. С помощью
команд POS/POSA/POSP осуществляется перемещение позиционирующих осей и
одновременная координация процессов движения.
Типичными примерами для позиционирующих осей являются:
• устройства загрузки палет
• измерительные установки
С помощью WAITP можно обозначить в программе ЧПУ место, на котором
осуществляется ожидание до тех пор, пока запрограммированная в одном из
предыдущих кадров ЧПУ в POSA ось не достигнет своей конечной позиции.
При WAITMC при поступлении указанной метки ожидания сразу же устанавливается
следующий кадр ЧПУ.
Синтаксис
POS[<ось>]=<позиция>
POSA[<ось>]=<позиция>
POSP[<ось>]=(<конечная позиция>,<длина фрагмента>,<режим>)
FA[<ось>]=<значение>
WAITP(<ось>) ; Программирование в отдельном кадре ЧПУ!
WAITMC(<метка ожидания>)
Значение
POS / POSA: Переместить позиционирующую ось на указанную позицию
POS и POSA имеют идентичную функциональность, но отличаются в
параметрах смены кадра:
•С POS последовательное включение кадра ЧПУ происходит только
после достижения позиции подвода.
•С POSA последовательное включение кадра ЧПУ происходит и
если позиции подвода не достигнута.
<ось>: Имя перемещаемой оси (идентификатор оси
канала или гео-оси)
<позиция>: Позиция оси для подвода
Тип: REAL

Регулирование подачи
7.2 Перемещение позиционирующих осей (POS, POSA, POSP, FA, WAITP, WAITMC)
Основы
120 Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
POSP: Постепенное перемещение позиционирующей оси на указанную
конечную позицию
<конечная позиция>: Конечная позиция оси для подвода
<длина фрагмента>
:
Длина фрагмента
<режим>:Режим подвода
= 0: Для обоих последних фрагментов
выполняется разделение
оставшегося пути до конечной
позиции на два заключительных
фрагмента равного размера
(предустановка).
= 1: Длина фрагмента согласуется таким
образом, что сумма всех
вычисленных длин фрагментов
точна равна пути до конечной
позиции.
Указание:
POSP используется специально для программирования маятниковых
движений.
Литература:
Руководство по программированию "Расширенное
программирование"; глава "Качание"
FA: Подача для указанной позиционирующей оси
<ось>: Имя перемещаемой оси (идентификатор оси канала
или гео-оси)
<значение>:Скорость подачи
Единица: мм/мин или дюйм/мин или градус/мин
Указание:
На кадр ЧПУ может быть запрограммировано макс. 5 значения FA.
WAITP: Ожидать завершения перемещения позиционирующей оси
Обработка последующих кадров не начинается до тех пор, пока
указанная и запрограммированная в предшествующем кадре с
помощью POSA позиционирующая ось не достигнет своей конечной
позиции (с точным остановом точным).
<ось>: Имя оси (идентификатор оси канала или гео-оси),
для которой должна действовать команда WAITP
Указание:
С помощью WAITP можно разрешить ось в качестве качающейся оси
или для перемещения в качестве конкурирующей позиционирующей
оси (через PLC).