Руководство. Расширенное программирование, Справочник по программированию Sinumerik 840D (new)
Подождите немного. Документ загружается.

Синхронные действия движения
10.3 Переменные главного хода для синхронных действий
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
581
10.3.11 Информация по типам кадров в интерполяторе ($AC_BLOCKTYPE,
$AC_BLOCKTYPEINFO, $AC_SPLITBLOCK)
Функция
Для получения информации об актуальном в настоящее время на главному ходу кадре,
для синхронных действий доступны следующие системные переменные:
• $AC_BLOCKTYPE
• $AC_BLOCKTYPEINFO
• $AC_SPLITBLOCK
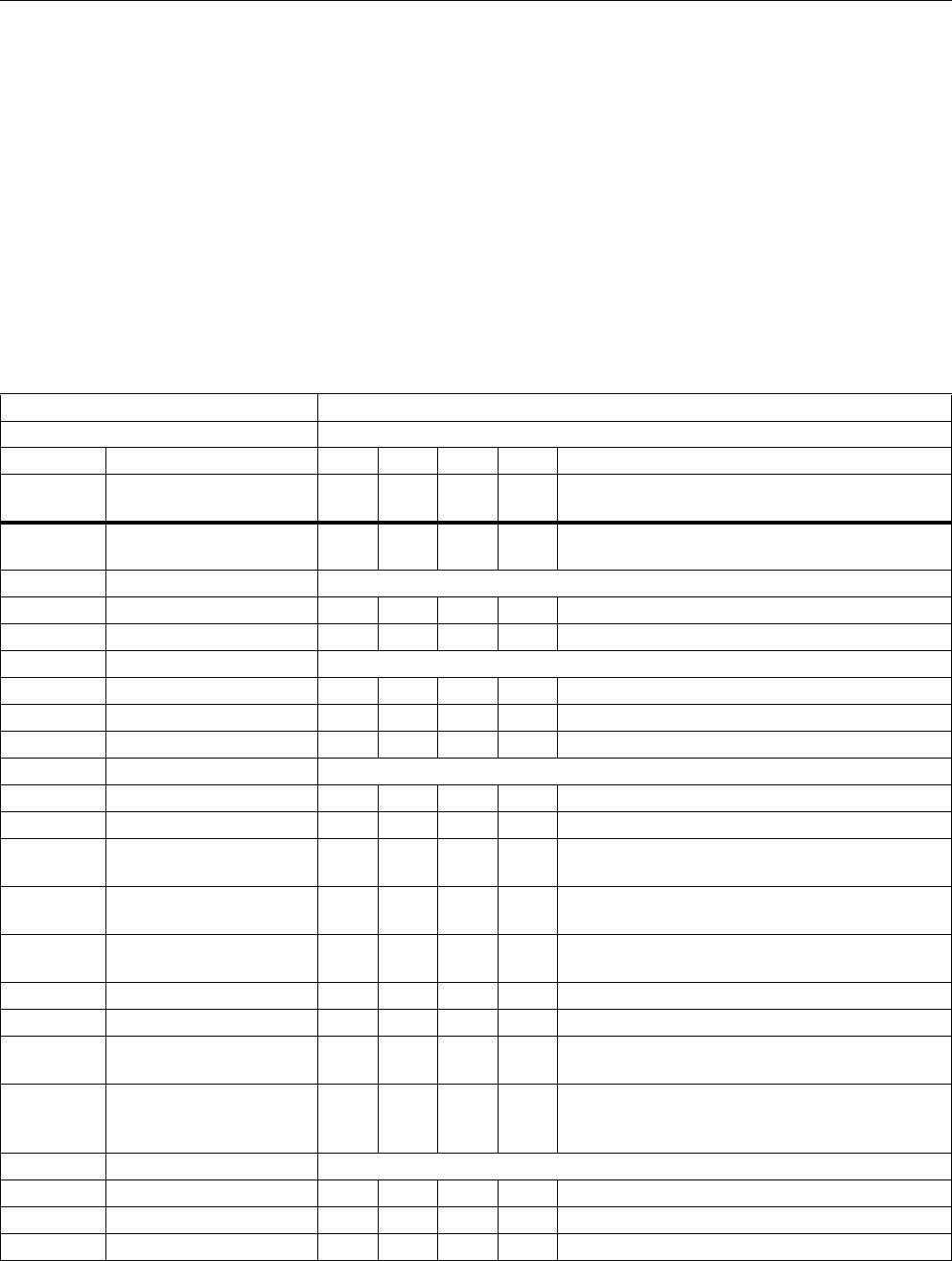
Переменные типа блока и информации о типе блока
$AC_BLOCKTYPE $AC_BLOCKTYPEINFO
Величина: Величина:
0 отлична от 0 T H Z E Значение:
Оригиналь
ный кадр
Промежуточный кадр Триггер для промежуточного кадра:
1 1 0 0 0 созданный системой кадр, дополнительная
информация отсутствует
2 2 0 0 1 Фаски/закругления: прямая
2 2 0 0 2 Фаски/закругления: окружность
3 3001SAR: подвод по прямой
3 3 0 0 2 SAR: подвод по четверти круга
3 3003SAR: подвод по полукругу
Коррекция инструмента:
4 4 0 0 1 кадр подвода после STOPRE
4 4 0 0 2 Соединительные кадры при не найденной
точке пересечения
4 4 0 0 3 Точечная окружность на внутренних углах
(только для TRACYL)
4 4 0 0 4 Обходная окружность (или коническое
сечение) на наружных углах
4 4 0 0 5 Кадры подвода при подавлении коррекции
4 4 0 0 6 Кадры подвода при повторной активации КРИ
4 4 0 0 7 Разбивка кадра из-за слишком большого
изгиба
4 4 0 0 8 Кадры компенсации при торцовом
фрезеровании 3D (вектор инструмента ||
вектор плоскости)
Перешлифовка через:
5 5001G641
5 5002G642
Синхронные действия движения
10.3 Переменные главного хода для синхронных действий
Расширенное программирование
582 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
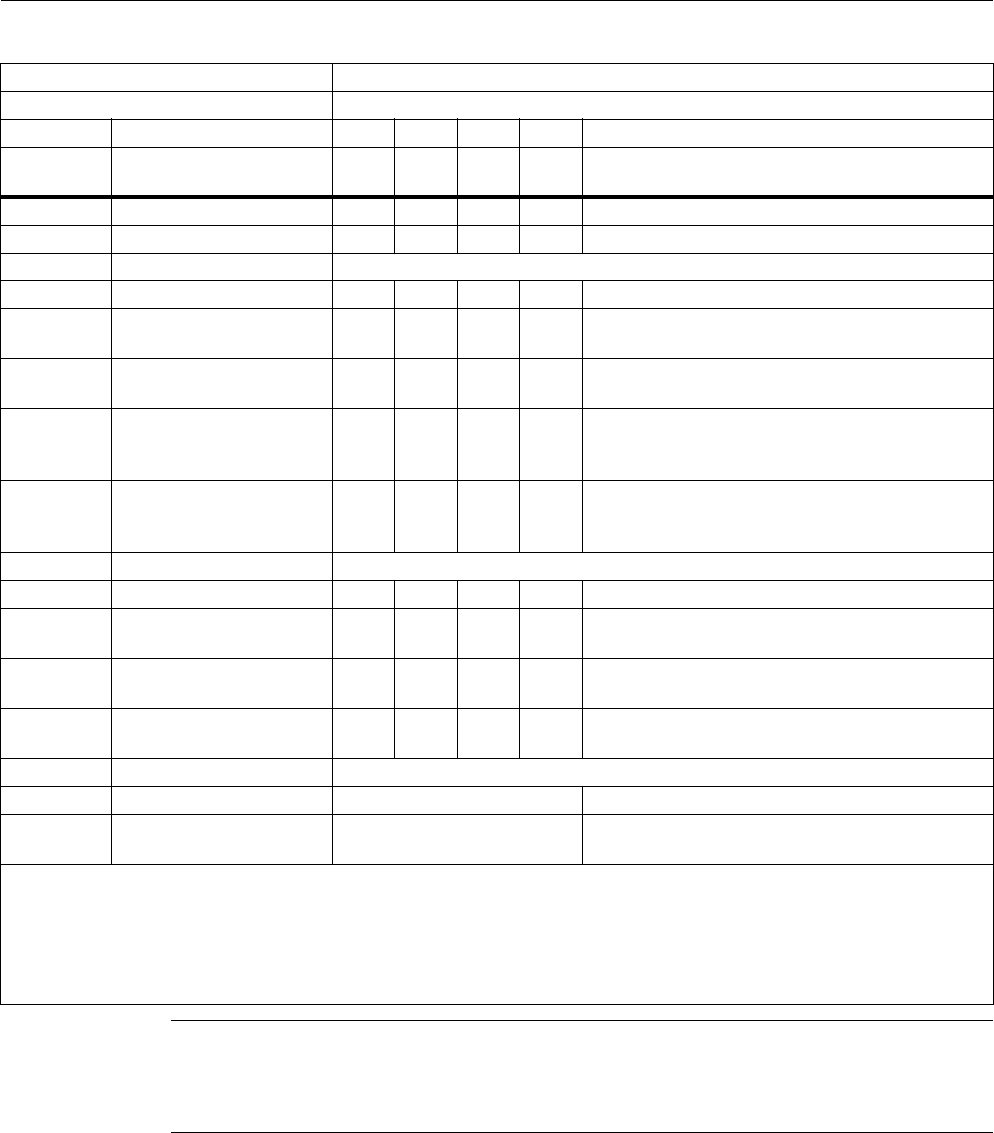
5 5003G643
5 5004G644
Кадр TLIFT с:
6 6001линейным движением тангенциальной оси и
без движения отвода
6 6002не линейным движением тангенциальной оси
(полином) и без движения отвода
6 6003движением отвода, движение тангенциальной
оси и движение отвода запускаются
одновременно
6 6004движением отвода, тангенциальная ось
запускается только после достижения
определенной позиции отвода.
Разделение пути:
7 7001запрограммированное разделение пути без
активной штамповки или вырубки
7 7002запрограммированное разделение пути с
активной штамповкой или вырубкой
7 7003созданное системой автоматически
разделение пути
Компилируемые циклы:
8 ID приложения ID приложения компилируемых циклов,
создавшего кадр
T: четвертая позиция
H: третья позиция
Z: вторая позиция
E: первая позиция
$AC_BLOCKTYPE $AC_BLOCKTYPEINFO
Величина: Величина:
0 отлична от 0 T H Z E Значение:
Оригиналь
ный кадр
Промежуточный кадр Триггер для промежуточного кадра:
Примечание
$AC_BLOCKTYPEINFO всегда содержит на четвертой позиции (T) и значение для типа
блока на тот случай, если имеется промежуточный кадр. В $AC_BLOCKTYPE отличной
от 0 четвертная позиция не передается.
Синхронные действия движения
10.3 Переменные главного хода для синхронных действий
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
583
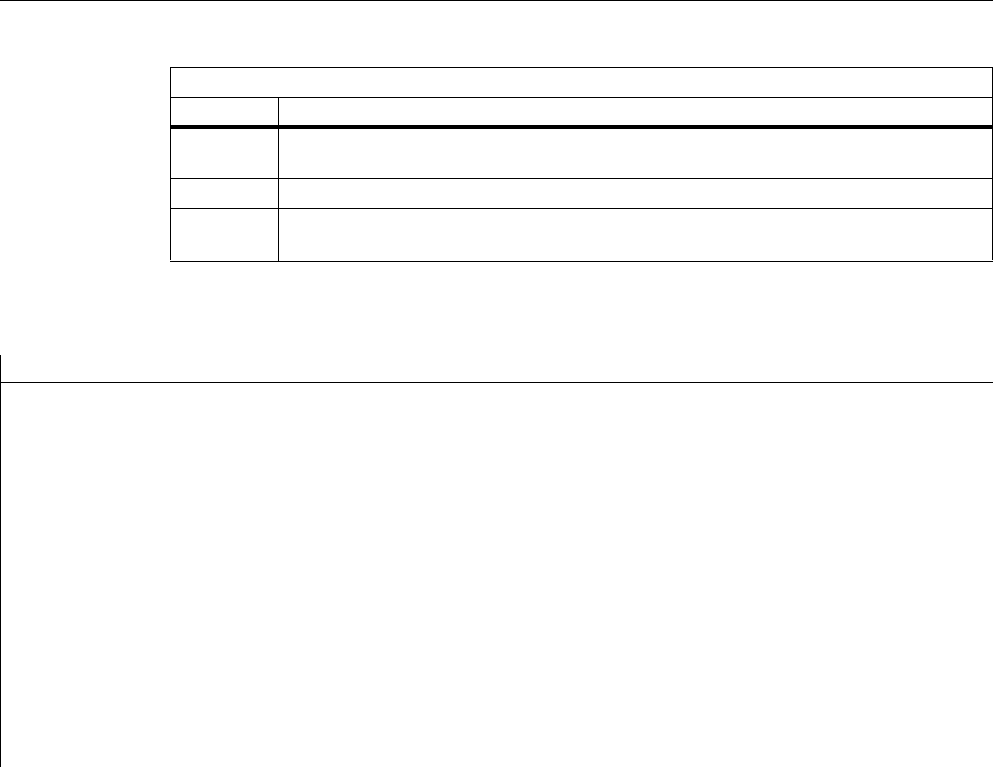
Пример: подсчет кадров перешлифовки
$AC_SPLITBLOCK
Величина: Значение:
0 Не измененный запрограммированный кадр, (созданный через компрессор кадр
также обрабатывается как запрограммированный кадр)
1 Имеется созданный системой кадр или сокращенный оригинальный кадр
3 Имеется последний кадр в цепочке созданных системой кадров или сокращенных
оригинальных кадров
Программный код Комментарий
$AC_MARKER[0]=0
$AC_MARKER[1]=0
$AC_MARKER[2]=0
...
; Определение синхронных действий, с помощью которых подсчитываются
кадры перешлифовки.
; Все кадры перешлифовки подсчитываются в $AC_MARKER[0]:
ID=1 WHENEVER ($AC_TIMEC==0) AND ($AC_BLOCKTYPE==5) DO $AC_MARKER[0]=$AC_MARKER[0]+1
...
; Созданные с помощью G641 кадры перешлифовки подсчитываются в $AC_MARKER[1]:
ID=2 WHENEVER ($AC_TIMEC==0) AND ($AC_BLOCKTYPEINFO==5001) DO $AC_MARKER[1]=$AC_MARKER[1]+1
; Созданные с помощью G642 кадры перешлифовки подсчитываются в $AC_MARKER[2]:
ID=3 WHENEVER ($AC_TIMEC==0) AND ($AC_BLOCKTYPEINFO==5002) DO $AC_MARKER[2]=$AC_MARKER[2]+1
...
Синхронные действия движения
10.4 Операции в синхронных действиях
Расширенное программирование
584 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
10.4 Операции в синхронных действиях
10.4.1 Обзор возможных операций в синхронных действиях
Операции в синхронных действиях состоят из присвоений значений, вызовов
параметров или функций, кодовых слов или технологических циклов. Через операторы
возможны сложные действия.
Возможные случаи использования:
• вычисления сложных выражений в такте IPO
• движения осей и управления шпинделем
• изменение и обработка установочных данных из синхронных действий в режиме
online (к примеру, вывод позиций и таймеров программных кулачков на PLC или
периферию ЧПУ)
• вывод вспомогательных функций на PLC
• отладка дополнительных функций безопасности
• установка наложенного движения, коррекции инструмента Online и регулировки
дистанции
• выполнение операций во всех режимах работы
• управление синхронными действиями с PLC
• выполнение технологических циклов
• вывод цифровых и аналоговых сигналов
• регистрация рабочих характеристик из синхронных действий в такте интерполяции и
регистрация машинного времени регулятора положения для оценки загруженности
• возможности диагностики на интерфейсе управления
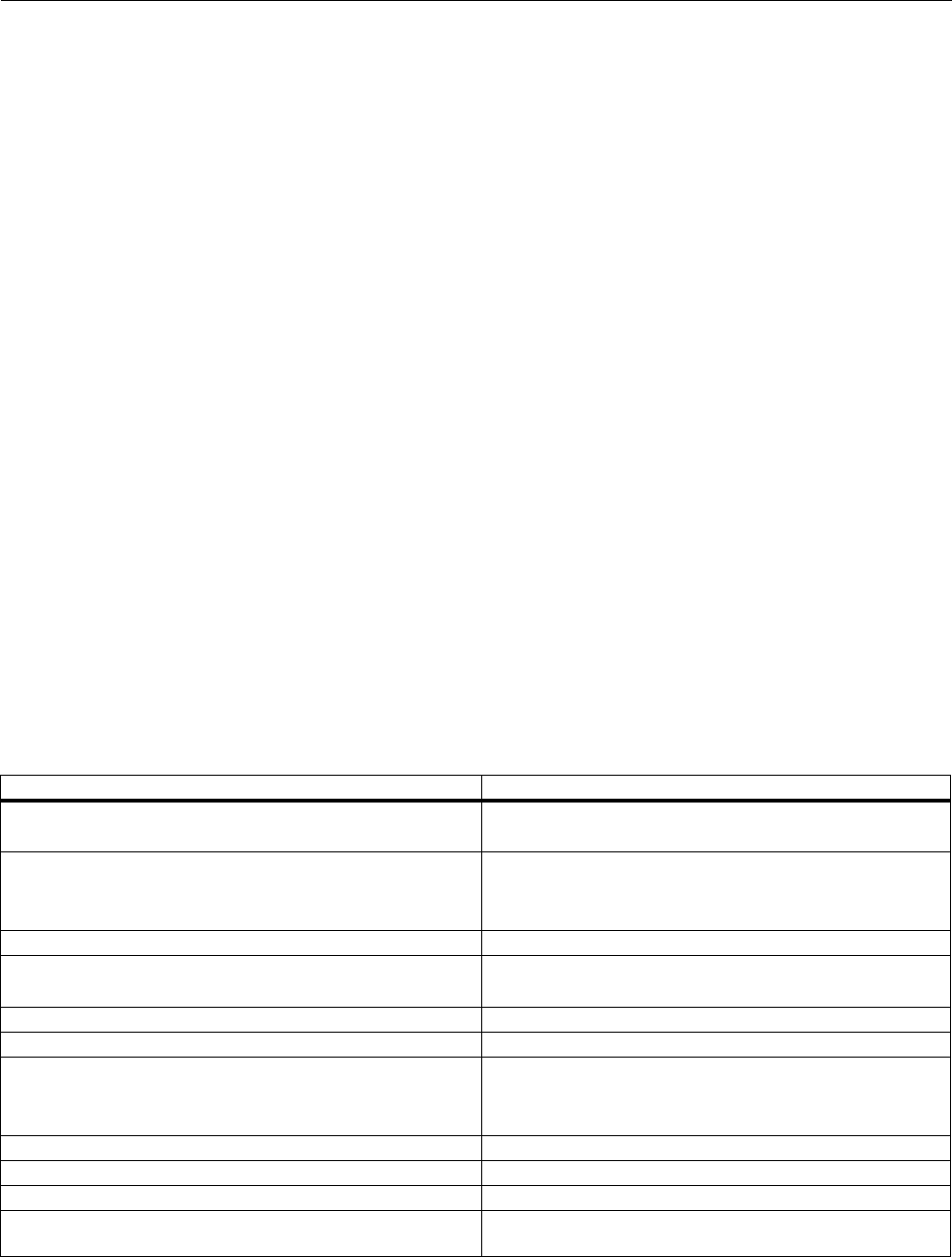
Синхронное действие Описание
DO $V…=
DO $A...=
присвоение (значения Servo)
присвоение переменных (переменные главного хода)
DO $AC…[n]=
DO $AC_MARKER[n]=
DO $AC_PARAM[n]=
Специальные переменные главного хода
Чтение или запись маркеров синхронного действия
Чтение или запись параметров синхронного действия
DO $R[n]= Чтение или запись R-переменных
DO $MD...=
DO $$SD...=
Чтение значения MD на момент интерполяции
Запись значения SD в главном ходе
DO $AC_TIMER[n]=стартовое значение Таймер
DO $AC_FIFO1[n] …FIFO10[n]= Переменная FIFO
DO $AC_BLOCKTYPE=
DO $AC_BLOCKTYPEINFO=
DO $AC_SPLITBLOCK=
Интерпретация актуального кадра (переменные
главного хода)
DO M-, S и H, к примеру, M07 Вывод вспомогательных функций M, S и H
DO RDISABLE Установить блокировку загрузки
DO STOPREOF Отменить остановку предварительной обработки
DO DELDTG Быстрое стирание остатка пути без остановки
предварительной обработки
Синхронные действия движения
10.4 Операции в синхронных действиях
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
585
FTCDEF(полин., LL, UL , коэфф.)
DO SYNFCT(полин., Output, Input)
Определение полиномов
Активация синхронных функций: адаптивное
управление
DO FTOC Коррекция инструмента Online
DO G70/G71/G700/G710 Определить систему единиц для задач
позиционирования (указание размеров в дюймах или
метрически)
DO POS[ось]= / DO MOV[ось]=
DO SPOS[шпиндель]=
Запустить/позиционировать/остановить командные оси
Запустить/позиционировать/остановить шпиндели
DO MOV[ось]=значение Запустить/остановить бесконечные движения
командной оси
DO POS[ось]= FA [ось]= Осевая подача FA
ID=1 ... DO POS[ось]= FA [ось]=
ID=2 ... DO POS[ось]=
$AA_IM[ось] FA [ось]=
Позиционирование из синхронных действий
DO PRESETON(ось, значение) Установка фактического значения (Preset из
синхронных действий)
ID=1 EVERY $A_IN[1]=1 DO M3 S….
ID=2 EVERY $A_IN[2]=1 DO SPOS=
Запустить/позиционировать/остановить шпиндели
DO TRAILON(FA,LA,коэффициент связи)
DO LEADON(FA,LA,NRCTAB,OVW)
Включить буксировку
Включить соединение по главному значению
DO MEAWA(ось)=
DO MEAC(ось)=
Включить осевое измерение
Включить непрерывное измерение
DO [поле n, m]=SET(значение, значение, ...)
DO [поле n, m]=REP(значение, значение, ...)
Инициализация переменных поля со списками значений
Инициализация переменных поля с одинаковыми
значениями
DO SETM(маркер Nr.)
DO CLEARM(маркер Nr.)
Установка меток ожидания
Удаление меток ожидания
DO SETAL(ошибка Nr.) Установка ошибки циклов (дополнительная функция
безопасности)
DO FXS[ось]=
DO FXST[ось]=
DO FXSW[ось]=
DO FOCON[ось]=
DO FOCOF[ось]=
Выбрать наезд на жесткий упор
Изменить зажимной момент
Изменить окно контроля
Активировать движение с ограниченным моментом/
силой (модально) FOC
Деактивировать движение с ограниченным моментом/
силой
(синхронное действие с привязкой к кадру)
ID=2 EVERY $AC_BLOCKTYPE==0 DO $R1=$AC_TANEB Угол между касательной к траектории в конечной точке
актуального кадра и касательной к траектории в
стартовой точке запрограммированного следующего
кадра
DO $AA_OVR=
DO $AC_OVR=
DO $AA_PLC_OVR
DO $AC_PLC_OVR
DO $AA_TOTAL_OVR
DO $AC_TOTAL_OVR
Осевая процентовка
Процентовка траектории
заданная с PLC осевая процентовка
заданная с PLC процентовка траектории
результирующая осевая процентовка
результирующая процентовка траектории
Синхронное действие Описание

Синхронные действия движения
10.4 Операции в синхронных действиях
Расширенное программирование
586 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
10.4.2 Вывод вспомогательных функций
Функция
Момент вывода
Вывод вспомогательных функций осуществляется в синхронном действии
непосредственно на момент вывода действия. Определенный через машинные данные
момент времени вывода для вспомогательных функций не действует.
Момент времени вывода имеет место при выполнении условия.
Пример:
Включение СОЖ в определенной позиции оси:
WHEN $AA_IM[X]>=15 DO M07 POS[X]=20 FA[X]=250
Разрешенные кодовые слова в действующих не модально синхронных действиях (без
модального ID)
Вспомогательные функции в действующих не модально синхронных действиях (без
модального ID) могут быть запрограммированы только с кодовыми словами WHEN или
EVERY.
$AN_IPO_ACT_LOAD=
$AN_IPO_MAX_LOAD=
$AN_IPO_MIN_LOAD=
$AN_IPO_LOAD_PERCENT=
$AN_SYNC_ACT_LOAD=
$AN_SYNC_MAX_LOAD=
$AN_SYNC_TO_IPO=
актуальное машинное время IPO
макс. машинное время IPO
мин. машинное время IPO
актуальное машинное время IPO по отношению к такту
IPO
актуальное машинное время для синхронного действия
по всем каналам
макс. машинное время для синхронного действия по
всем каналам
процентная доля всего синхронного действия
DO TECCYCLE Выполнить технологический цикл
DO LOCK(n, n, ...)
DO UNLOCK(n, n, ...)
DO RESET(n, n, ...)
Блокировать
Разрешить
RESET технологического цикла
CANCEL(n, n, ...) Удалить модальные синхронные действия с
обозначением ID(S) в программе обработки детали
Синхронное действие Описание
Примечание
Следующие вспомогательные функции запрещены в синхронных действиях:
• M0, M1, M2, M17, M30: останов/конец программы (M2, M17, M30 возможны для
технологического цикла)
• M6 или установленные через машинные данные функции М для смены инструмента
Синхронные действия движения
10.4 Операции в синхронных действиях
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
587
Пример
10.4.3 Установка блокировки загрузки (RDISABLE)
Функция
При RDISABLE в случае выполненного условия дальнейшая обработка кадра в главной
программе останавливается. Запрограммированные синхронные действия движения
продолжают обрабатываться, последующие кадры продолжают подготавливаться.
В конце кадра с RDISABLE запускается точный останов, независимо от того, будет ли
активна блокировка загрузки или нет. Точный останов запускается и тогда, когда СЧПУ
находится в режиме управления траекторией (G64, G641 ... G645).
Использование
С помощью RDISABLE, к примеру, в зависимости от внешних входов, программа может
быть запущена в такте интерполяции.
Пример
Программный код Комментарий
WHEN $AA_IW[Q1]>5 DO M172 H510 ; Если фактическое значение оси Q1 превысит
5 мм, вывести вспомогательные функции M172
и H510 на PLC .
Программный код Комментарий
WHENEVER $A_INA[2]<7000 DO RDISABLE ; Если напряжение на входе 2 падает
ниже 7В, продолжение программы
останавливается ( допущение: значение
1000 соответствует 1В).
...
N10 G01 X10 ; В конце N10 действует RDISABLE, если
при его обработке условие выполнено.
N20 Y20
...
Синхронные действия движения
10.4 Операции в синхронных действиях
Расширенное программирование
588 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
Граничные условия
Действие RDISABLE при переходе оси
Если RDISABLE действует на кадр, в котором выполняется и переход оси, то
RDISABLE действует и на запущенный переходом оси кадр REPOSA.
Иллюстративная программа:
Через синхронное действие ось X забирается из траектории, выполняется REORG
(REPOSA). Функция RDISABLE действует на процесс REPOSA. Из-за этого сначала ось
X движется на свою позицию, поле в N115 выполняется движение на Y20.
Для недопущения REORG можно запрограммировать в N101 RELEASE(X) или
WAITP(X), т.к. тем самым ось X разрешается для перемещения, к примеру, как
командная ось:
10.4.4 Отмена остановки предварительной обработки (STOPREOF)
Функция
В случае явно запрограммированной остановки предварительной обработки STOPRE
или не явно активированной через активное синхронное действие остановки
предварительной обработки, STOPREOF, как только условие выполнено, отменяет
остановку предварительной обработки после следующего кадра обработки.
Программный код
N100 G0 G60 X300 Y300
N105 WHEN TRUE DO POS[X]=20 FA[X]=20000
N110 WHENEVER $AA_IM[X]<>20 DO RDISABLE
N115 G0 Y20
N120 Y-20
N125 M30
Программный код
N100 G0 G60 X300 Y300
N101 RELEASE(X)
N105 WHEN TRUE DO POS[X]=20 FA[X]=20000
...
Примечание
STOPREOF должна программироваться с кодовым словом WHEN и покадрово (без
номера ID).
Синхронные действия движения
10.4 Операции в синхронных действиях
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
589
Пример
Быстрое ветвление программы на конце кадра.
10.4.5 Стирание остатка пути (DELDTG)
Функция
В зависимости от условия, можно запустить стирание остатка пути для траектории и
для указанных осей.
Имеется:
• быстрое, подготовленное стирание остатка пути
• стирание остатка пути без подготовки
Подготовленное стирание остатка пути с DELDTG позволяет очень быстро реагировать
на пусковое событие и поэтому используется в критических по времени приложениях, к
примеру, когда
• время между стиранием остатка пути и запуском следующего кадра должно быть
очень коротким.
• условие для стирания остатка пути будет выполнено с очень высокой вероятностью.
Синтаксис
Стирание остатка пути для траектории
DO DELDTG
Осевое стирание остатка пути
DO DELDTG(ось1) DELDTG(ось2) ...
Программный код Комментарий
WHEN $AC_DTEB<5 DO STOPREOF ; Если расстояние до конца кадра
становится меньше 5 мм, ;то
отменить остановку
предварительной обработки.
G01 X100 ; После выполнения линейной
интерполяции,
остановка предварительной
обработки отменяется.
IF $A_INA[7]>500 GOTOF MARKE1=X100 ; При превышении на входе 7
напряжения в 5 В ;перейти на
метку 1.
Примечание
Указанное после DELDTG в скобках обозначение оси действительно только для
одной позиционирующей оси.
Синхронные действия движения
10.4 Операции в синхронных действиях
Расширенное программирование
590 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
Пример быстрого стирания остатка пути траектории
Пример быстрого осевого стирания остатка пути
Дополнительная информация
В конце кадра движения, в котором было запущено подготовленное стирание остатка
пути, не явно активируется остановка предварительной обработки.
Таким образом, режим управления траекторией или движения позиционирующих осей
в конце кадра с быстрым стиранием остатка пути прерываются или останавливаются.
Программный код Комментарий
WHEN $A_IN[1]==1 DO DELDTG
N100 G01 X100 Y100 F1000 ; Если вход установлен, то движение
отменяется
N110 G01 X…
IF $AA_DELT>50…
Программный код Комментарий
Отмена движения позиционирования:
ID=1 WHEN $A_IN[1]==1 DO MOV[V]=3 FA[V]=700 ; Запустить ось
WHEN $A_IN[2]==1 DO DELDTG(V) ; Стирание остатка пути, останов
оси выполняется с MOV=0
В зависимости от входного напряжения стереть
остаточный путь:
WHEN $A_INA[5]>8000 DO DELDTG(X1) ; Как только на входе 5 напряжение
становится выше 8В, стереть
остаточный путь оси X1
. Движение по траектории
продолжается.
POS[X1]=100 FA[X1]=10 G1 Z100 F1000
Примечание
Подготовленное стирание остатка пути:
• не может использоваться при активной коррекции радиуса инструмента.
• может быть запрограммировано только в активных покадрово синхронных
действиях (без номера ID).