Schneider P., Eberly D.H. Geometric Tools for Computer Graphics
Подождите немного. Документ загружается.

324 Chapter 8 Miscellaneous 2D Problems
lOut[1].origin.x = cir.center.x - cir.radius * l1.direction.x;
lOut[1].origin.y = cir.center.y - cir.radius * l1.direction.y;
lOut[1].direction.x = dPerp.x;
lOut[1].direction.y = dPerp.y;
} else {
float invLength = 1.0/l1.direction.length();
lOut[0].origin.x = cir.center.x + cir.radius * l1.direction.x * invLength;
lOut[0].origin.y = cir.center.y + cir.radius * l1.direction.y * invLength;
lOut[0].direction.x = dPerp.x;
lOut[0].direction.y = dPerp.y;
lOut[1].origin.x = cir.center.x - cir.radius * l1.direction.x * invLength;
lOut[1].origin.y = cir.center.y - cir.radius * l1.direction.y * invLength;
lOut[1].direction.x = dPerp.x;
lOut[1].direction.y = dPerp.y;
}
}
Chapter
9Geometric
Primitives in 3D
This chapter contains the definitions for various three-dimensional geometric prim-
itives that are commonly used in applications. Some of the primitives have multiple
representations. A geometric query involving an object might be more effectively for-
mulated with one representation than another. The discussion about a query will
indicate which representation is more appropriate.
In geometric queries with objects such as polyhedra, the object can be treated
as a two-dimensional or a three-dimensional object. For example, the tetrahedron
as a two-dimensional object is just the collection of four triangle faces. As a three-
dimensional object, the tetrahedron refers to its faces and the region that it bounds.
Some objects have distinct names for the two possibilities. For example, sphere refers
to the two-dimensional surface and ball refers to the sphere and the region it bounds.
When necessary, the distinction will be made clear. In the absence of distinct names,
the word solid will be used. For example, the method for computing the distance
between a point and a tetrahedron treats the tetrahedron as a solid. If a point is inside
the tetrahedron boundary, then the distance is zero.
9.1 Linear Components
The simplest form to work with for a line in 3D is the parametric form, X(t) =P +t
d
for t ∈ R, P a point on the line, and
d =
0 a direction for the line. A ray is a line
with the restriction on the parametric form that t ≥ 0. The origin of the ray is P .
A line segment, or simply segment, is a line with the restriction on the parametric
form that t ∈ [t
0
, t
1
]. I f P
0
and P
1
are end points of the segment, the standard form
325

326 Chapter 9 Geometric Primitives in 3D
for the segment is X(t) = (1 − t)P
0
+ tP
1
for t ∈ [0, 1]. This form is converted to
the parametric form by setting
d = P
1
− P
0
.Thesymmetric form for a segment
consists of a centerpoint C, a unit-length direction vector
ˆ
d,andaradiusr.The
parameterization is X(t) = C + t
ˆ
d for |t |≤r. The length of a segment is P
1
− P
0
for the standard form and 2r for the symmetric form.
Lines in 2D were equivalently defined as the set of points satisfying the algebraic
equation n ·X =c,wheren =
0 is a normal vector to the line. The geometric analogy
in 3D is that a line is the set of intersection of two algebraic equations n
0
· X = c
0
and n
1
· X =c
1
,wheren
0
and n
1
are linearly independent. The two linear equations
have three unknowns, the components of X, so we expect that there is a single free
variable in the solution. This variable corresponds to the parameter of the line in the
parametric form. The formulation in terms of the intersection of two planes is called
the normal form for the line.
A parametric form for the line can be derived from the normal form. The cross
product n
0
×n
1
is perpendicular to both linearly independent vectors n
0
and n
1
,
so the three vectors form a linearly independent set. Any point can be written as a
linear combination of the vectors. In particular, P = d
0
n
0
+ d
1
n
1
+ t n
0
×n
1
. Define
e
ij
=n
i
·n
j
. Taking dot products of the equation for P with the normal vectors, we
arrive at two equations c
0
=n
0
· P = e
00
d
0
+ e
01
d
1
and c
1
=n
1
· P = e
01
d
0
+ e
11
d
1
.
The two equations in the two unknowns d
0
and d
1
can be solved in the usual manner.
The parametric form for the line is
X(t) =
e
11
c
0
− e
01
c
1
e
00
e
11
− e
2
01
n
0
+
e
00
c
1
− e
01
c
0
e
00
e
11
− e
2
01
n
1
+ t n
0
×n
1
Throughout this book, the term linear component is used to denote a line, ray, or
segment.
9.2 Planar Components
Various definitions for planes are provided in this section. In many applications,
standard 2D objects are manipulated within a 3D environment. These objects must
be manipulated in a 3D coordinate system, even though they are naturally defined in
a 2D coordinate system. The process of constructing the 3D representations of planar
2D objects is described here. Planes and any objects defined in a plane are collectively
referred to as planar components.
9.2.1 Planes
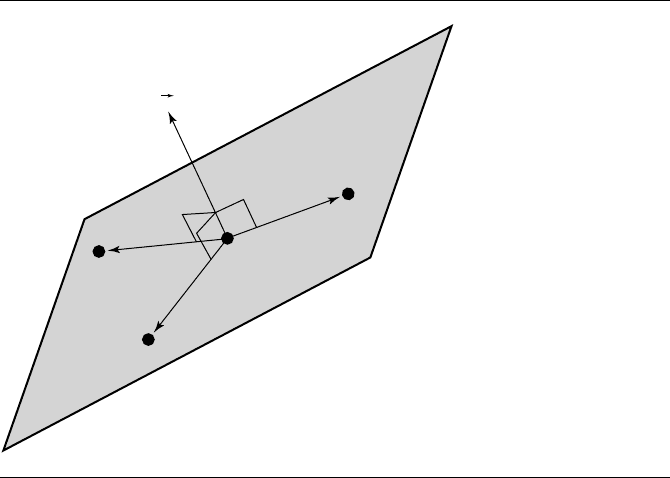
A plane is defined by the algebraic equation n ·(X −P)= 0, where n =
0isanormal
to the plane and where P is a point on the plane, as shown in Figure 9.1. This form
9.2 Planar Components 327
P
X
X
X
n
Figure 9.1 A plane is defined as the set of all points X satisfying n · (X − P)= 0.
isreferredtoasthenormal-point form. A similar definition is n · X = c for some
constant c.Thisformisreferredtoasthenormal-constant form.Toconstructapoint
on the plane using the normal-constant form, choose P = d n for some scalar d.
Replacing this in the formula yields c =n · (d n) = dn
2
. Thus, d = c/n
2
. Going
in the other direction, given the normal-point form, the constant c in the normal-
constant form is c =n · P .
If we let X = [
xyz
], we can rewrite the vector X −P in terms of its com-
ponents, yielding
X − P =
[
x −P
x
y −P
y
z − P
z
]
If we let n = [
abc
], then we can rewrite the normal-point form of the plane
equation as
ax + by + cz + d = 0 (9.1)
where a, b, and c are constants, not all zero, and d =−n · P . This is known as the
implicit form of a plane equation—simply a slightly different rendering of the normal-
constant form—that is frequently seen in the literature.
328 Chapter 9 Geometric Primitives in 3D
x
r = d
n = [a b c]
x
r = –d
yy
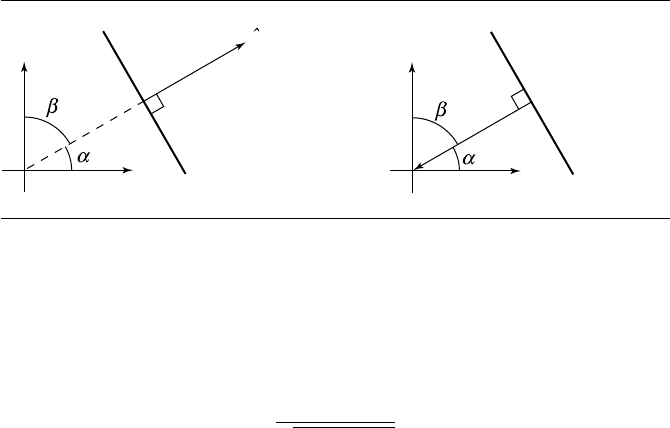
Figure 9.2 Geometric interpretation of plane equation coefficients.
If a
2
+ b
2
+ c
2
= 1 (or, equivalently, if n=1), then the plane equation is said
to be normalized. A nonnormalized representation can be converted by multiplying
the coefficients through by
1
√
a
2
+ b
2
+ c
2
While it is not necessary, in the abstract, to use a normalized representation, many
algorithms involving planes can be made somewhat less computationally expensive
if a normalized representation is maintained; this is because the square root and
division can be done once “up front” and then avoided in various intersection or
distance computations.
The normalized form allows for a more intuitive geometric interpretation of
the coefficients. Looking at Figure 9.2, we see a “cross section” of a plane that is
perpendicular to the page. Simple trigonometry shows us that
a =cos α
b = cos β
c = cos θ
where θ is the angle formed with the positive z-axis.
More significantly (at least for intuition) is the following: if the distance from the
origin to the plane is r, then |d|=r; further, the sign of d is negative if ˆn points away
from the origin and positive if it points toward the origin.
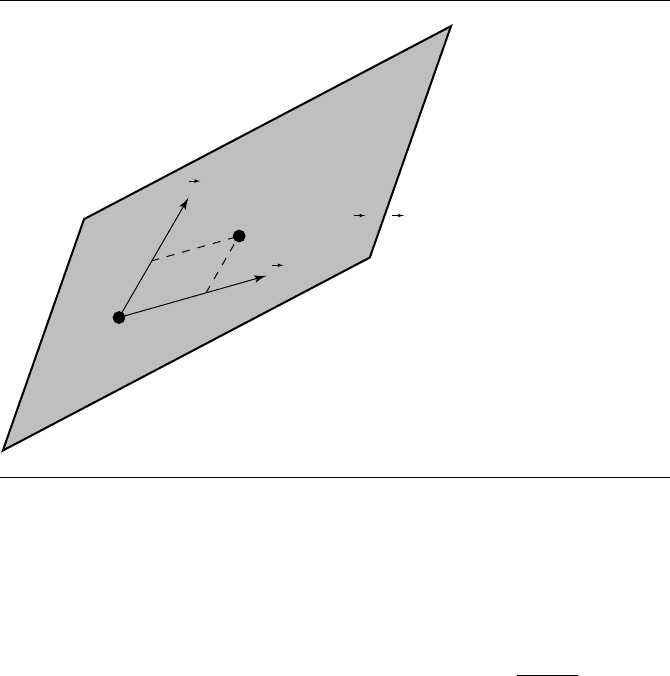
The parametric form for a plane is X(s, t)=P +s ˆu +t ˆv for s ∈R and t ∈R.The
point P is on the plane. The directions ˆu =
0 and ˆv =
0 must be linearly independent
vectors (see Figure 9.3).
To convert from parametric form to normal-point form, just use P as the point
on the plane. The normal vector must be perpendicular to both direction vectors,
so ˆn =ˆu ׈v. To convert from normal-point form to parametric form, again use
P as is. We must choose two linearly independent vectors ˆu and ˆv that are perpen-
9.2 Planar Components 329
u
v
X(s, t) = P + su + tv
P
Figure 9.3 The parametric representation of a plane.
dicular to ˆn. There are infinitely many choices, but here is one that allows a robust
numerical implementation. The idea is to choose a unit-length vector ˆu =(u
0
, u
1
, u
2
)
perpendicular to ˆn = (n
0
, n
1
, n
2
) so that ˆu has a zero component. You cannot safely
choose any component to be zero. For example, if you choose ˆu = (u
0
, u
1
,0), then
0 =n ·ˆu = n
0
u
0
+n
1
u
1
. A formal solution is ˆu = (n
1
, −n
0
,0)/
n
2
0
+ n
2
1
, but clearly
there is an algebraic problem when n
0
= n
1
= 0 and numerical problems when n
0
and n
1
are both nearly zero. Better is to choose a component of ˆu to be zero based on
information about ˆn.
The pseudocode is
Vector N = nonzero plane normal;
Vector U, V;
if (|N.x| >= |N.y|) {
// N.x or N.z is the largest magnitude component, swap them
U.x = +N.z;
U.y=0;
U.z = -N.x;
} else {
330 Chapter 9 Geometric Primitives in 3D
// N.y or N.z is the largest magnitude component, swap them
U.x=0;
U.y = +N.z;
U.z = -N.y;
}
V = Cross(N, U);
9.2.2 Coordinate System Relative to a Plane
Given a plane with normal n and point P , sometimes it is convenient to have a full
orthonormal coordinate system for R
3
with origin at P , n as one of the coordinate
axis directions, and two other coordinate axes in the plane itself. In this case, n is first
normalized so that it is a unit-length vector. The vector ˆu created in the pseudocode
of the last subsection is also normalized to unit length. The cross product ˆv =ˆn ׈u
is automatically unit length.
The pseudocode is
Vector N = unit-length plane normal;
Vector U, V;
if (|N.x| >= |N.y|) {
// N.x or N.z is the largest magnitude component
invLength=1/sqrt(N.x * N.x + N.z * N.z);
U.x = +N.z * invLength;
U.y=0;
U.z = -N.x * invLength;
} else {
// N.y or N.z is the largest magnitude component
invLength=1/sqrt(N.y * N.y + N.z * N.z);
U.x=0;
U.y = +N.z * invLength;
U.z = -N.y * invLength;
}
V = Cross(N, U); // automatically unit length
Any point X ∈R
3
can be written in the implied coordinate system as
X = P + y
0
ˆu + y
1
ˆv + y
2
ˆn = P + R y
where R is a rotation matrix whose columns are ˆu, ˆv, and ˆn (in that order) and where
y = (y
0
, y
1
, y
2
) isa3× 1vector.
9.2 Planar Components 331
9.2.3 2D Objects in a Plane
Consider a set S ⊂R
2
in the xy-plane that represents a 2D object. Abstractly,
S ={(x, y) ∈ R
2
: (x, y) satisfies some constraints}
This object can be embedded in a 2D plane in 3D. Let the plane contain the point P
and have a unit-length normal ˆn.If ˆu and ˆv are vectors in the plane so that ˆu, ˆv, and
ˆn form an orthonormal set, then the (x, y) pairs for the object in 2D can be used as
the coordinates of ˆu and ˆv as a method for embedding the 2D object in the plane in
3D, the embedded set labeled S
⊂ R
3
. This set is defined by
S
={P + x ˆu + y ˆv ∈R
3
: (x, y) ∈ S}
Observe that there are infinitely many planes in which the 2D object can be em-
bedded. Within each plane there are infinitely many ways to choose the vectors ˆu
and ˆv.
In many applications the problem is the reverse one—start with the object that
lives in a specific plane in 3D and obtain a congruent object in the xy-plane. The
term “congruent” refers to obtaining one object from the other by applying a rigid
motion. If S
is a set of points on a plane ˆn · (X −P)= 0, any point Q ∈ S
can be
converted to a point in the xy-plane by solving Q = P + x ˆu + y ˆv for x and y.Itis
assumed that {ˆu, ˆv, ˆn}is an orthonormal set. The solution is simple: x =ˆu · (Q −P)
and y =ˆv · (Q − P). Since Q is on the plane, ˆn · (Q − P)= 0. To see that the two
triangles are congruent, the three equations can be written in vector form as
x
y
0
=
ˆu · (Q − P)
ˆv · (Q − P)
ˆn · (Q − P)
= R(Q − P)
where R is a rotation matrix whose rows are ˆu, ˆv, and ˆn. Thus, points (x, y,0) in
the xy-plane are obtained from points in the plane ˆn · (X −P)= 0 by a translation
followed by a rotation, in total a rigid motion.
Example Given a 2D triangle with vertices (x
i
, y
i
) for i = 0, 1, 2, and given a plane ˆn · (X −
P)=0 in which the triangle should live, a simple choice for vertices of the triangle in
3D is V
i
= P + x
i
ˆu + y
i
ˆv for i = 0, 1, 2. Given vertices W
i
for i =0, 1, 2, construct
a triangle in the xy-plane that is congruent to the original triangle. To solve this
problem, construct a plane containing the original triangle. Define the plane origin
to be P = W
0
. Define the edge vectors e
0
= W
1
− W
0
and e
1
= W
2
− W
0
. A unit-
length normal vector to the plane of the triangle is ˆn =(e
0
×e
1
)/e
0
×e
1
. Construct
ˆu and ˆv as described earlier. Determine the coefficients d
ij
in the representations
e
0
=d
00
ˆu +d
01
ˆv and e
1
=d
10
ˆu +d
11
ˆv. The coefficients are easily computed using dot
products, d
00
=e
0
·ˆu, d
01
=e
0
·ˆv, d
10
=e
1
·ˆu, and d
11
=e
1
·ˆv. The representations
lead to W
1
= W
0
+e
0
= P + d
00
ˆu + d
01
ˆv and W
2
= W
1
+e
1
= P + d
10
ˆu + d
11
ˆv.
332 Chapter 9 Geometric Primitives in 3D
n
C
v
û
r
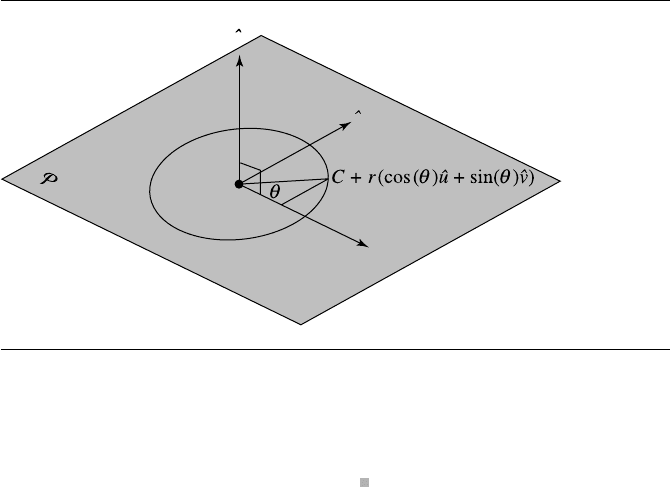
Figure 9.4 The parametric representation of a circle in 3D.
The vertices of the triangle as a 2D object are (0, 0), (d
00
, d
01
), and (d
10
, d
11
) and
correspond to W
0
, W
1
, and W
2
, respectively.
Example Suppose you want to have a formula for working with a circle in 3D whose center is
C ∈ R
3
and whose radius is r. The plane containing the circle is specified to have a
unit-length normal ˆn. The center of the circle must lie in the plane, so an equation
for the plane is ˆn · (X −C) = 0. The circle points X must be equidistant from the
center C, so another constraint is X − C=r. This algebraic equation defined on
all of R
3
produces a sphere centered at C and of radius r. However, only points on
the plane are desired, so the circle can be viewed as the set of intersection of the plane
and sphere. In 2D, a circle centered at the origin and having radius r is parameterized
by x = r cos θ and y =r sin θ for θ ∈[0, 2π) (see Figure 5.15). Formally, the circle in
2D is the set S ={(r cos θ , r sin θ) ∈ R
2
: θ ∈ [0, 2π)}. In 3D, the circle embedded in
the plane is the set S
={C +(r cos θ)ˆu +(r sin θ)ˆv : θ ∈ [0, 2π)} (see Figure 9.4). If
we define a vector-valued function ˆw(θ) = cos θ ˆu + sin θ ˆv, then the parametric 3D
circle definition can be written more compactly as
P = C +r ˆw(θ)
It is simple to verify the constraints on X =C +(r cos θ)ˆu + (r sin θ)ˆv. First,
ˆn · (X −C) =ˆn · ((r cos θ)ˆu + (r sin θ)ˆv)
= (r cos θ)ˆn ·ˆu + (r sin θ)ˆn ·ˆv
= (r cos θ)0 +(r sin θ)0, ˆn is orthogonal to ˆu and ˆv
= 0

9.3 Polymeshes, Polyhedra, and Polytopes 333
Second,
X − C
2
=(r cos θ)ˆu + (r sin θ)ˆv
2
= (r
2
cos
2
θ)ˆu
2
+ (2r
2
sin θ cos θ)ˆu ·ˆv + (r
2
sin
2
θ)ˆv
2
= (r
2
cos
2
θ)1 + (2r
2
sin θ cos θ)0 +(r
2
sin
2
θ)1,
ˆu and ˆv are orthonormal
= r
2
cos
2
θ + r
2
sin
2
θ
= r
2
Similar constructions apply to other quadratic curves in the plane.
Another quite useful method for obtaining a 2D representation of a planar object
S
in 3D is described below. The method uses projection, so the two objects are not
congruent. If the plane normal is ˆn = (n
0
, n
1
, n
2
), and if n
2
= 0, the projection of
a point Q = (q
0
, q
1
, q
2
) ∈ S
onto the xy-plane is Q
= (q
0
, q
1
). The condition that
n
2
= 0 is important. If it were zero, the plane of the object projects onto a straight
line, thereby losing much information about the original object. If in fact n
2
=0, the
projection can be made onto the xz-plane if n
1
=0 or onto the yz-plane if n
0
=0. In
practice, the largest magnitude normal component is used to identify the coordinate
plane of projection. This makes the projected object as large as possible compared to
its projections on the other coordinate planes. A typical application where this type
of construction is useful is in triangulation of a planar polygon in 3D. The congruent
mapping requires computing (x, y) = ( ˆu · (Q − P), ˆv · (Q − P)) for all polygon
vertices Q. The difference Q − P requires 3 subtractions, and each dot product
requires 2 multiplications and 1 addition. The total operation count for n vertices
is 9n. The projection mapping requires identifying a nonzero normal component
and extracting the two components for the coordinate plane of projection. Finding
the normal component is the only computational expense and requires a couple
of floating-point comparisons, clearly much cheaper than the congruent mapping.
The triangulation in the xy-plane produces triples of vertex indices that represent
the triangles. These triples are just as valid for the original polygon in 3D. Another
application is in computing the area of a planar polygon in 3D; Section 13.12 has
more detail on the construction.
9.3 Polymeshes, Polyhedra, and Polytopes
In this section are definitions for objects that consist of three types of geometric
components: vertices, edges, and faces. Vertices are, of course, just single points.
Edges are line segments whose end points are vertices. Faces are convex polygons
that live in 3D. Many applications support only triangular faces because of their
simplicity in storage and their ease of use in operations applied to collections of