Schneider P., Eberly D.H. Geometric Tools for Computer Graphics
Подождите немного. Документ загружается.

734 Chapter 13 Computational Geometry Topics
P
Q
0
Q
1
Q
1
P
Q
0
P
Q
0
Q
1
Q
0
Q
1
P
Q
0
Q
1
P
(a) (b)
(c) (d) (e)
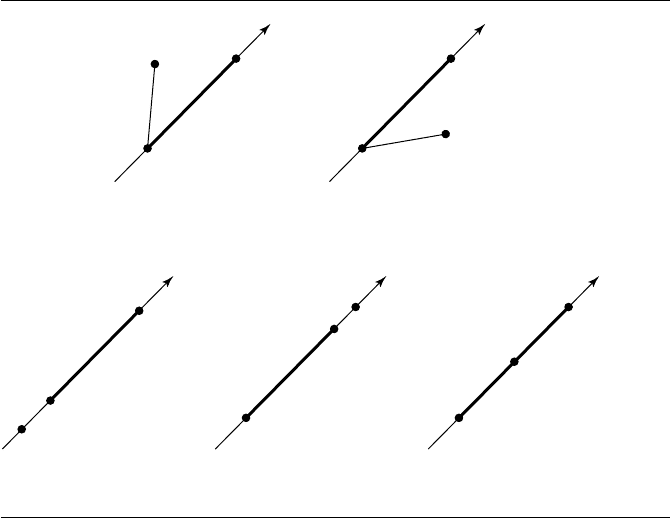
Figure 13.35 The five possibilities for the relationship of P to a line segment with end points Q
0
and Q
1
: P is (a) to the left of the segment, (b) to the right of the segment, (c) on the
line to the left of the segment, (d) on the line to the right of the segment, or (e) on
the line and contained by the segment.
you traverse the segment from Q
0
to Q
1
. Define a =P −Q
0
. The five possibilities,
labeled according to Figure 13.35, are characterized mathematically by
a. n ·a>0
b. n ·a<0
c. n ·a =0 and
d ·a<0
d. n ·a =0 and
d ·a>
d ·
d
e. n ·a =0 and 0 ≤
d ·a ≤
d ·
d
The pseudocode uses an integer flag to distinguish between these cases, the val-
ues given in the order of the tests above as
POSITIVE, NEGATIVE, COLLINEAR_LEFT,
COLLINEAR_RIGHT, and COLLINEAR_CONTAIN.
13.7 Convex Hulls 735
int CollinearTest(Point P, Point Q0, Point Q1)
{
PointD=Q1-Q0,N=-Perp(D),A=P-Q0;
float NdA = Dot(N, A);
if (NdA > 0)
return POSITIVE;
if (NdA < 0)
return NEGATIVE;
float DdA = Dot(D, A);
if (DdA < 0)
return COLLINEAR_LEFT;
if (DdA > Dot(D, D))
return COLLINEAR_RIGHT;
return COLLINEAR_CONTAIN;
}
Observe that the five possibilities match exactly those discussed for visibility of
vertices and edges for the current hull from the input point V . The pseudocode for
merging is listed below. If the hull becomes a triangle, the vertices are arranged in
counterclockwise order.
void MergeLinear(Point P, ConvexPolygon& hull, int& type)
{
switch (CollinearTest(P, hull[0], hull[1])) {
case POSITIVE:
type = PLANAR;
hull = {P, hull[0], hull[1]};
break;
case NEGATIVE:
type = PLANAR;
hull = {P, hull[1], hull[0]};
break;
case COLLINEAR_LEFT:
// collinear order <P, Q0, Q1>
hull = {P, Q1};
break;
case COLLINEAR_RIGHT:
// collinear order <Q0, Q1, P>
hull = {Q0, P};
break;
736 Chapter 13 Computational Geometry Topics
case COLLINEAR_CONTAIN:
// collinear order <Q0, P, Q1>, hull does not change
break;
}
}
Although theoretically correct, CollinearTest suffers from the usual problems
with floating-point round-off error. Points can be nearly collinear, but may as well
be treated as if they were collinear. A robust application would instead use fuzzy
arithmetic for the collinear test. Relative error tolerances should be used to avoid
dependencies on the magnitude of the input points. One possibility is to use an error
threshold ε>0 on the cosine of the angle θ between
d and a.If| cos(θ )|≤ε, then θ
may as well be treated as zero. That is, if |n ·a|=na| cos(θ)|≤εna, then
the three points are treated as collinear. The lengths of two vectors must be computed
in this formulation, a performance issue. To avoid the square root calculations, the
squared equation should be considered instead, |n ·a|
2
≤ εn
2
a
2
, where we are
using ε as a tolerance on | cos(θ)|
2
. A similar error threshold can be used for the
case when the three points are collinear. The parametric interval of containment is
[0,
d
2
], but can be expanded to [−ε
d
2
, (1 + ε)
d
2
]. The pseudocode to handle
this is listed below where
epsilon0 and epsilon1 are defined to be whatever the
application writer deems appropriate.
int CollinearTest(Point P, Point Q0, Point Q1)
{
PointD=Q1-Q0,A=P-Q0;
float NdA = D.x * A.y - D.y * A.x; // N = -Perp(D) = (-D.y, D.x)
float NdN = D.x * D.x + D.y * D.y; // |N| = |D|
float AdA = A.x * A.x + A.y * A.y;
if (NdA * NdA > epsilon0 * NdN * AdA) {
if (NdA > 0)
return POSITIVE;
if (NdA < 0)
return NEGATIVE;
}
float DdA = Dot(D, A);
if (DdA < -epsilon1 * NdN)
return COLLINEAR_LEFT;
if (DdA > (1 + epsilon1) * NdN)
return COLLINEAR_RIGHT;
return COLLINEAR_CONTAIN;
}
13.7 Convex Hulls 737
Once the current hull has three or more points, it is guaranteed to remain a
convex polygon with positive area regardless of the values of any further input points.
The final function to discuss is
MergePlanar. Once the first triangle, if any, is
created by
MergeLinear, the last inserted point that led to the triangle is always stored
in
hull[0]. This point is a good candidate for searching for the tangent points formed
by the next input point and the current hull. The planar merge contains two loops,
one to find the upper tangent point and one to find the lower tangent point. The loop
bodies just test for visibility based on the results of
CollinearTest applied to the input
point and edges of the current hull. The pseudocode is
void MergePlanar(Point P, ConvexPolygon& hull)
{
// find upper tangent point
for(U=0;i=1;U<hull.N;U=i,i=(i+1)modhull.N) {
test = CollinearTest(P, hull[U], hull[i]);
if (test == NEGATIVE) // edge visible, go to next edge
continue;
if (test == POSITIVE // edge not visible,
|| test == COLLINEAR_LEFT) { // only edge end point is visible
// upper found
break;
}
// test == COLLINEAR_CONTAIN || test == COLLINEAR_RIGHT
// Theoretically cannot occur when input points are distinct and
// sorted, but can occur because of floating-point round-off
// when P is very close to the current hull. Assume P is on the
// hull polygon--nothing to do.
return;
}
// find lower tangent point
for (L = 0; i = hull.N - 1; i >= 0;L=i,i--) {
test = CollinearTest(P, hull[i], hull[L]);
if (test == NEGATIVE) // edge visible, go to next edge
continue;
if (test == POSITIVE // edge not visible,
|| test == COLLINEAR_RIGHT) { // only edge end point is visible
// lower found
break;
}
738 Chapter 13 Computational Geometry Topics
// test == COLLINEAR_CONTAIN || test == COLLINEAR_LEFT
// Theoretically cannot occur when input points are distinct and
// sorted, but can occur because of floating-point round-off
// when P is very close to the current hull. Assume P is on the
// hull polygon--nothing to do.
return;
}
// Both tangent points found. Now do:
// 1. Remove visible edges from current hull.
// 2. Add new edges formed by P and tangent points.
}
The simplest algorithm for updating the hull in steps 1 and 2 indicated in the
pseudocode is to create a temporary hull from the current hull and input point by
iteration:
ConvexPolygon tmpHull;
tmpHull[0] = P;
for (i = 1; true; i++,U=(U+1)modhull.N) {
tmpHull[i] = hull[U];
if (U == L)
break;
}
hull = tmpHull;
However, the iteration is O(n), so the incremental algorithm becomes O(n
2
).To
avoid this, it is important to maintain the hull as some type of linked structure so
that the linked chain of visible edges can be disconnected at the tangent points, an
O(1) operation, and deletion needs to be done in O(1) time. The chain should not be
deleted one node at a time; otherwise you are back to O(n) time. This requires an
implementation that pays close attention to memory management. After the linked
chain is removed, new links are added from the node representing P to the nodes
representing the tangent points.
An important note about the architecture of the algorithm is in order. All of the
problems due to floating-point round-off errors are encapsulated by the function
CollinearTest. Any unexpected results from an application of the incremental hull
algorithm can only be due to the implementation of
CollinearTest, particularly in
the choice of the relative error thresholds ε
0
and ε
1
. The encapsulation makes it easy
to debug any problems that arise in the application.
13.7 Convex Hulls 739
Divide-and-Conquer Method
A standard paradigm in computer science is divide and conquer. The idea is to take
a problem, divide it into two smaller problems of the same type, solve the smaller
problems, and merge the results to construct the solution to the original problem. If
the problem has n inputs and T
n
is the time it takes to solve the problem, the division
into two smaller problems, each with half the inputs, leads to the recursion formula
T
n
= 2T
n/2
+ M
n
. Each smaller problem has (approximately) n/2 inputs and takes
T
n/2
time to solve (by definition of T
k
). The quantity M
n
represents the time it takes
to merge the solution to the two smaller problems. If M
n
takes linear time, O(n),
then it can be shown that the solution T
n
is O(n log n). Recurrences of this form are
discussed in detail in Cormen, Leiserson, and Rivest (1990). The divide-and-conquer
method applied to convex hulls turns out to have a linear-time merge, so the convex
hull algorithm for a set of n points takes O(n log n) time.
As in the incremental construction of the convex hull, the input points are sorted
according to the same scheme: (x
0
, y
0
)<(x
1
, y
1
) when x
0
<x
1
or when x
0
= x
1
and
y
0
<y
1
. We also make no assumptions about the structure of the point set. Just as
in the incremental hull algorithm, the input points are sorted and duplicates are
removed. The initial pseudocode is
ConvexPolygon DividAndConquerHull(int n, Point V[n])
{
Sort(n, V);
RemoveDuplicates(n, V); // n can decrease, V has contiguous elements
ConvexPolygon hull;
GetHull(0,n-1,V,hull);
return hull;
}
The recursive construction occurs in GetHull. Its structure is shown below. The
values
i0 and i1 are the first and last indices of a subset of points whose convex hull
must be computed.
void GetHull(int i0, int i1, Point V[], ConvexPolygon& hull)
{
int quantity = i1 - i0 + 1;
if (quantity > 1) {
// middle index of input range
int mid = (i0 + i1) / 2;
// find hull of subsets (mid - i0+1>=i1-mid)
ConvexPolygon LHull, RHull;
GetHull(i0, mid, V, LHull);
740 Chapter 13 Computational Geometry Topics
Upper tangent
Lower tangent
P
U
P
L
H
L
H
R
Q
U
Q
L
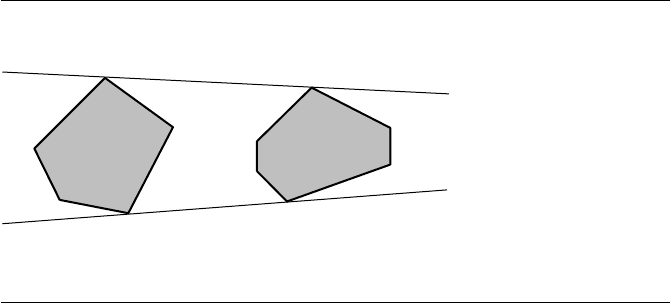
Figure 13.36 TwoconvexhullsH
L
and H
R
and their upper and lower tangents.
GetHull(mid + 1, i1, V, RHull);
// merge the convex hulls into a single convex hull
Merge(LHull, RHull, hull);
} else {
// convex hull is a single point
hull[0] = V[i0];
}
}
The technical problem, of course, is how Merge computes the convex hull of two
convex hulls. The idea is an extension of that for computing the convex hull of a
single point, a convex set itself, and a convex polygon. In the latter case, the merge
depended on finding upper and lower tangents to the hull and containing the single
point; Figure 13.34 shows the typical situation. For two convex polygons, we still must
find upper and lower tangents to both hulls; Figure 13.36 shows the typical situation.
Unlike the incremental hull problem, we do not know one of the tangent points ahead
of time. An exhaustive search over pairs of points, one from each polygon, results
in an O(n
2
) merge. An O(n) merge is readily available instead if we perform the
following walking algorithm on the left hull H
L
and the right hull H
R
.
The method is described for finding the lower tangent to the hulls. Find the point
P
i
on H
L
with the largest x-component, a linear-time process. Find the point Q
j
on
H
R
with the smallest x-component, also linear time. If the line containing P
i
and Q
j
is not tangent to H
L
, traverse the vertices of H
L
in the clockwise direction (decrement
i) until the line is tangent to H
L
. Now switch to H
R
. If the line containing the current
P
i
and Q
j
is not tangent to H
R
, traverse the vertices of H
R
in the counterclockwise
direction (increment j) until the line is tangent to H
R
. This traversal produces a new
13.7 Convex Hulls 741
1
2
3
4
5
P
1
P
2
P
3
P
4
P
0
Q
2
Q
3
Q
4
Q
1
Q
0
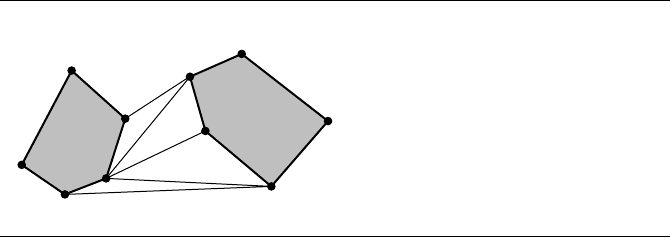
Figure 13.37
TwoconvexhullsH
L
and H
R
and the incremental search for the lower tangent.
line that might no longer be tangent to H
L
. Alternately repeat the traversals until
the line is tangent to both hulls. Figure 13.37 shows a typical situation. The extreme
points are P
0
and Q
2
. The initial segment, labeled 1, is P
0
, Q
2
. This segment is not
tangent to the left hull at P
0
, so the left hull index is decremented (modulo 5), and
the new segment, labeled 2, is P
4
, Q
2
. This segment is tangent to the left hull at
P
4
, but it is not tangent to the right hull at Q
2
. The right hull index is incremented,
and the new segment, labeled 3, is P
4
, Q
3
. The segment is not tangent to the right
hull, so the right hull index is incremented again, and the new segment, labeled 4,
is P
4
, Q
4
. The segment is now tangent to the right hull, but not tangent to the left
hull. The left hull index is decremented, and the new segment, labeled 5, is P
3
, Q
4
.
This segment is tangent to both hulls and is the lower tangent to the hull. It is possible
that a tangent is collinear with a hull edge that shares the tangent point, but rather
than test for this in each merge and extend the tangent to include the collinear edge
if necessary, removal of collinear edges can be done as a postprocess on the convex
polygon returned by the hull construction.
The pseudocode for
Merge is listed below. The case of small sets near the leaf nodes
of the implicit binary tree implied by the recursion are specially handled.
void Merge(ConvexPolygon LHull, ConvexPolygon RHull, ConvexPolygon& hull)
{
if (LHull.n == 1 && RHull.n == 1) {
// duplicate points were removed earlier, the hull is a line segment
hull[0] = LHull[0];
hull[1] = RHull[0];
return;
}
if (LHull.n == 1 && RHull.n == 2) {
// merge point and line segment, result in RHull
MergeLinear(LHull[0], RHull);
hull = RHull;
742 Chapter 13 Computational Geometry Topics
return;
}
if (LHull.n == 2 && RHull.n == 1) {
// merge point and line segment, result in LHull
MergeLinear(RHull[0], LHull);
hull = LHull;
return;
}
if (LHull.n == 2 && RHull.n == 2) {
// merge point and line segment, result in LHull
MergeLinear(RHull[1], LHull);
if (LHull.n == 2) {
// RHull[1] was on line of LHull, merge next point
MergeLinear(RHull[0], LHull);
hull = LHull;
return;
}
// RHull[1] and LHull form a triangle. Remove RHull[1] so that
// RHull is a single point. LHull has been modified to be a
// triangle. Let the tangent search take care of the merge.
RHull.Remove(1);
}
// find indices of extreme points with respect to x
LMax = IndexOfMaximum{LHull[i].x};
RMin = IndexOfMinimum{RHull[i].x};
// get lower tangent to hulls, start search at extreme points
LLIndex = LMax; // lower left index
LRIndex = RMin; // lower right index
GetTangent(LHull, RHull, LLIndex, LRIndex);
// get upper tangent to hulls, start search at extreme points
ULIndex = LMax; // upper left index
URIndex = RMin; // upper right index
GetTangent(RHull, LHull, URIndex, ULIndex);
// construct the counterclockwise-ordered merged-hull vertices
ConvexPolygon tmpHull;
i=0;
for (each j between LRIndex and URIndex inclusive) {
tmpHull[i] = hull[j];
i++;
13.7 Convex Hulls 743
}
for (each j between ULIndex and LLIndex inclusive) {
tmpHull[i] = hull[j];
i++;
}
hull = tmpHull;
}
The function MergeLinear has identical structure to the one used in the incremen-
tal hull construction, with the minor change in semantics that the input line segment
polygon is modified to store the merged hull.
The tangent search uses the same concepts of visibility as in the incremental hull
construction. As described earlier, the search flip-flops between the two input hulls.
The input indices
L and U are the starting ones for the search. On return, the indices
correspond to the tangent points on the two hulls.
void GetTangent(ConvexPolygon LHull, ConvexPolygon RHull, int& L, int& R)
{
// In theory the loop terminates in a finite number of steps, but the
// upper bound for the loop variable is used to trap problems caused by
// floating-point round-off errors that might lead to an infinite loop.
for(inti=0;i<LHull.n + RHull.n; i++) {
// end points of potential tangent
Point L1 = LHull[L];
Point R0 = RHull[R];
// walk clockwise along left hull to find tangency
int Lm1 = (L - 1) mod LHull.n;
Point L0 = LHull[Lm1];
int test = CollinearTest(R0, L0, L1);
if (test == NEGATIVE || test == COLLINEAR_LEFT) {
L = Lm1;
continue;
}
// walk counterclockwise along right hull to find tangency
int Rp1 = (R + 1) mod RHull.n;
Point R1 = RHull[Rp1];
test = CollinearTest(L1, R0, R1);
if (test == NEGATIVE || test == COLLINEAR_RIGHT) {
R = Rp1;
continue;
}