Schneider P., Eberly D.H. Geometric Tools for Computer Graphics
Подождите немного. Документ загружается.

754 Chapter 13 Computational Geometry Topics
and the triangles of the convex polyhedron are added to the table. The
Hull<3> data
structure represents points as (s
1
, s
2
, s
3
). On the reformatting, these values become
(s
1
, s
2
, s
3
,0) to be in the same space as (t
1
, t
2
, t
3
, t
4
). All such 4-vectors are coordinates
in the affine system with origin A and basis vectors
ˆ
d
1
,
ˆ
d
2
,
ˆ
d
3
, and
ˆ
d
4
.
The
Update function finds the terminator of the hull, in this case the simple, closed
polyline that separates the visible faces from the hidden ones. The faces visible to P
are removed, and new faces formed by P and the terminator edges are added to the
hull.
Finally, the hyperspatial merge is shown below. Because the original space has
dimension 4, there is no need to project out the basis components since the corre-
sponding vector r (
R in the pseudocode) will always be
0.
void Merge<4>(Point P, Hull<4> hull)
{
// Uses affine coordinate system {A; D1, D2, D3}.
// Hull remains hyperspatial.
B=P-A;
t1 = Dot(D1, B);
t2 = Dot(D2, B);
t3 = Dot(D3, B);
t4 = Dot(D4, B);
Update(hull, t1, t2, t3, t4);
}
The Update function finds the terminator of the hull, the collection of faces that
separate the visible hyperfaces from the hidden ones. The hyperfaces visible to P are
removed, and new hyperfaces formed by P and the terminator faces are added to
the hull. Since the last routine works on 4-vectors, the affine coordinates are not
necessary, and the points can be manipulated in the original coordinate system.
If this choice is made in an implementation, then the block of code in
Merge<3>
for the increase in dimension to 4 can be appended with code to replace all the
points (stored in affine coordinates) in the current hull with the original points. This
requires storing the original indices of the input points, but this is something that is
done in small-dimension implementations anyway because the indices for the input
data set should be used to store connectivity information, not the indices of the sorted
data set. Also if this choice is made, then
Merge<4> just calls the update function.
If the general format of a merge function is preserved by doing the projection
anyway, we can implement a single, generic merge function, as shown below.
void Merge<k>(Point P, Hull<k> hull)
{
B=P-A;
R=B;
for (i = 1; i <= k; i++) {
13.7 Convex Hulls 755
t[i] = Dot(D[i], B);
R=R-t[i] * D[i];
}
if (|R| > 0) {
// dimension increases
h=h+1;
convert hull from Hull<k> format to Hull<k + 1> format;
D[k+1]=R/|R|;
t[k + 1] = Dot(D[k + 1], B);
ReformatAndInsert<k + 1>(hull,t ); // t = (t[1],...,t[k + 1])
} else {
// hull remains the same dimension
Update<k>(hull, t); // t = (t[1],...,t[k])
}
}
To keep the implementation simple, the Update<k> function can be written to just
iterate over all hyperfaces and keep those that are hidden and remove those that are
visible, all the while keeping track of each face that is shared by a visible hyperface
and a hidden hyperface, then iterate over those faces and form the hyperfaces with P
and add them to finalize the merged hull.
The floating-point issues in this approach are threefold. First, the computation
of the affine coordinates
t[i] will involve floating-point round-off errors. Second,
the comparison of length of r to zero should be replaced by a comparison to a
small, positive threshold. Even so, such a comparison is affected by the magnitude
of the inputs. Third, the
Update function tests for visibility of hyperfaces. Each test
is effectively a (k + 1) × (k + 1) determinant calculation where the first row of the
matrix has all 1 entries and the columns, not including the first row entries, are the
points forming the hyperface and the input point. Floating-point round-off errors
may cause incorrect classification when the determinant is theoretically nearly zero.
Divide-and-Conquer Method
The basic concept is the same as in small dimensions. The important function is
Merge, which computes the convex hull of two other convex hulls. Although easy
to describe, the implementation is quite difficult to build. A supporting hyperplane
must be found for the two hulls. A hyperedge that is not part of either hull is used
to fold the hyperplane until it encounters a vertex of either hull. That vertex and the
hyperedge are used to form a hyperface of the merged hull. The wrapping continues
until the original hyperedge is encountered. The hyperfaces visible to either of the
input hulls must be removed. As in the 3D problem, the set of such hyperfaces on a
single hull is connected, so a depth-first search suffices to find and remove them. The
hidden hyperfaces on each input hull are, of course, kept for the merged hull.
756 Chapter 13 Computational Geometry Topics
(a) (b)
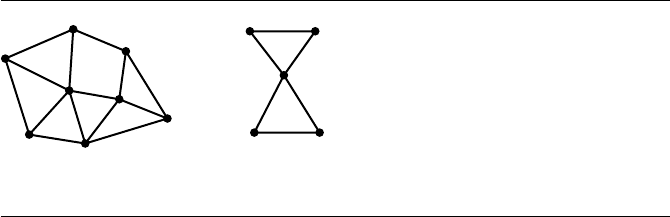
Figure 13.42
Triangulations of finite point sets: (a) with optional requirements; (b) without.
13.8 Delaunay Triangulation
A triangulation of a finite set of points S ⊂ R
2
is a set of triangles whose vertices
are the points in S and whose edges connect pairs of points in S.EachpointofS is
required to occur in at least one triangle. The edges are only allowed to intersect at the
vertices. An optional requirement is that the union of the triangles is the convex hull
of S. Figure 13.42 shows triangulations of two point sets. The triangulation in Figure
13.42(a) includes the optional requirement, but the triangulation in Figure 13.42(b)
does not. Similar terminology is used for constructing tetrahedra whose vertices are
points in a finite set S ⊂R
3
. The computational geometry researchers also refer to this
as a triangulation, but some practitioners call this a tetrahedralization.ForS ⊂R
d
,an
object whose vertices are in S is called a simplex (plural simplices), the generalization
of triangle and tetrahedron to higher dimensions. We suppose that simplexification is
as good a term as any for constructing the simplices whose vertices are in S.
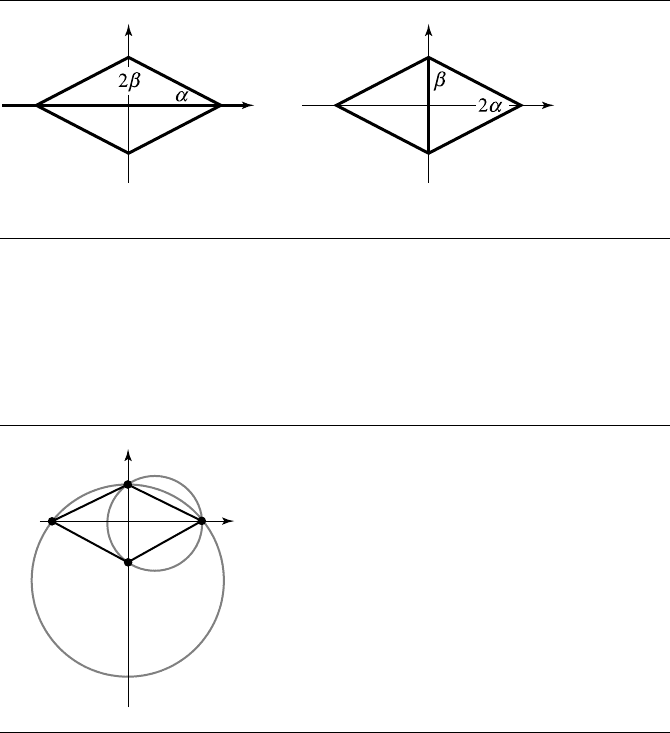
A common desire in a triangulation is that there not be long, thin triangles. Con-
sider the case of four points forming a convex quadrilateral. Figure 13.43 shows the
two different choices for triangulation where the vertices are (±2, 0) and (0, ±1).The
goal is to select the triangulation that maximizes the minimum angle. The triangula-
tion in Figure 13.43(b) has this property. The concept of maximizing the minimum
angle produces a Delaunay triangulation. A better formal development is presented in
computational geometry books and is based on understanding Voronoi diagrams for
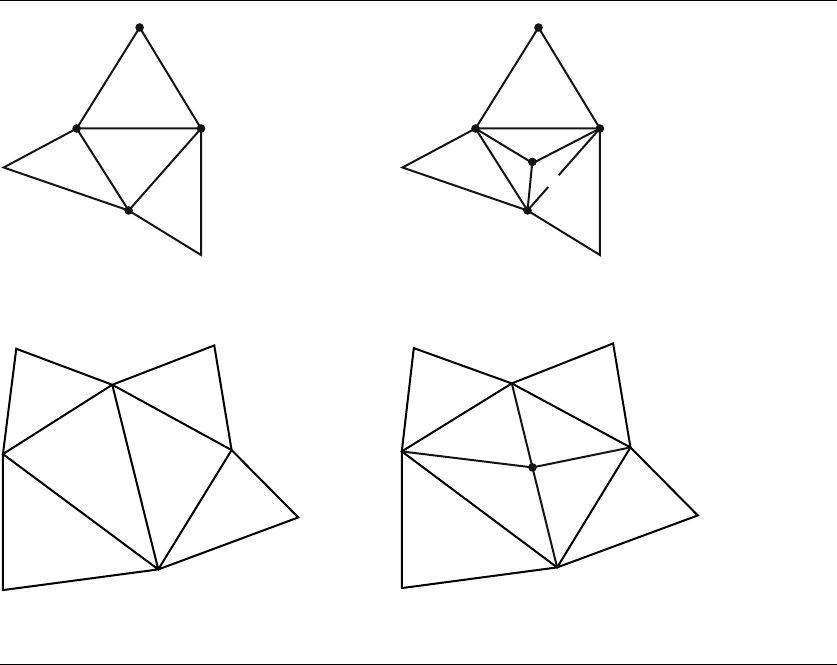
finite point sets and constructing the Delaunay triangulation from it. An important
concept is that of a circumcircle, the circle containing the three vertices of a triangle.
Although the angles of the triangles can be computed explicitly, the choice of one
of the two triangulations is equivalently determined by containment of one point
within the circumcircle of the other three points. In Figure 13.44, (0, −1) is inside
the circumcircle of triangle (2, 0), (0, 1), (−2, 0), but (−2, 0) is outside the circum-
circle of triangle (2, 0), (0, 1), (0, −1). The Delaunay triangulation has the property
that the circumcircle of each triangle contains no other points of the input set. This
property is used for incremental construction of the triangulation, the topic discussed
13.8 Delaunay Triangulation 757
2–2
–1
1
2–2
–1
1
(a) (b)
Figure 13.43
The two triangulations for a convex quadrilateral. The angle α
.
=
0.46 radians and the
angle β
.
=
1.11 radians. (a) The minimum angle of the top triangle is α (smaller than
β). (b) The minimum angle is 2α radians (smaller than β); the triangles maximize
the minimum angle.
(–2, 0) (2, 0)
(0, 1)
(0, –1)
Figure 13.44 Two circumcircles for the triangles of Figure 13.43.
next. The original ideas of constructing the triangulation incrementally are found in
Bowyer (1981) and Watson (1981).
13.8.1 Incremental Construction in 2D
Given a finite set of points in R
2
, the triangulation begins by constructing a triangle
large enough to contain the point set. As it turns out, it should be large enough to also
contain the union of circumcircles for the final triangulation. The triangle is called a
supertriangle for the point set. There are infinitely many supertriangles. For example,
758 Chapter 13 Computational Geometry Topics
if you have one supertriangle, then any triangle containing it is also a supertriangle.
A reasonably sized triangle that is easy to compute is one that contains a circle that
contains the axis-aligned bounding rectangle of the points.
Each input point P is inserted into the triangulation. A triangle containing P
must be found. An iteration over all triangles and point-in-triangle tests clearly al-
low you to find a triangle, but this can be a slow process when the input set has a
large number of points. A better search uses a linear walk over the current triangles.
This type of search was presented in Section 13.4.2 for a mesh of convex polygons.
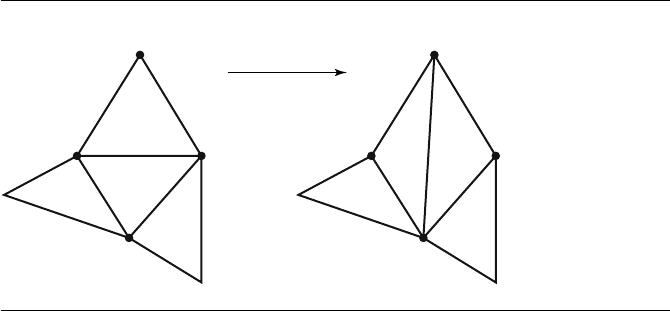
The idea, of course, specializes to the case when the polygons are all triangles. Two
possible situations happen as shown in Figure 13.45. If P is interior to a triangle T ,
that triangle is split into three subtriangles, N
i
for 0 ≤ i ≤ 2. Before the split, the
invariant of the algorithm is that each pair T , A
i
,whereA
i
is an adjacent trian-
gle to T , satisfied the empty circumcircle condition. That is, the circumcircle of T
did not contain the opposite vertex of A, and the circumcircle of A did not con-
tain the opposite vertex of T . After the split, T will be removed, so the triangles A
i
are now adjacent to the new triangles N
i
. The circumcircle condition for the pairs
N
i
, A
i
might not be satisfied, so the pairs need to be processed to make sure the
condition is satisfied by a swap of the shared edge, the type of operation illustrated in
Figure 13.43.
The pseudocode for the incremental construction is listed below:
void IncrementalDelaunay2D(int N, Point P[N])
{
mesh.Insert(Supertriangle(N, P)); // mesh vertices V(0), V(1), V(2)
for(i=0;i<N;i++) {
C = mesh.Container(P[i]); // triangle or edge
if (C is a triangle T) {
// P[i] splits T into three subtriangles
for(j=0;j<3;j++) {
// insert subtriangle into mesh
N = mesh.Insert(i, T.v(j), T.v(j + 1));
// N and adjacent triangle might need edge swap
A = T.adj(j);
if (A is not null)
stack.push(N, A);
}
mesh.Remove(T);
} else {
// C is an edge E
// P[i] splits each triangle sharing E into two subtriangles
for (k = 0; k <= 1; k++) {
T = E.adj(k);
13.8 Delaunay Triangulation 759
if (T is not null) {
for(j=0;j<3;j++) {
if (T.edge(i) is not equal to E) {
// insert subtriangle into mesh
N = mesh.Insert(i, T.v(j), T.v(j + 1));
// N and adjacent triangle might need edge swap
A = T.adj(j);
if (A is not null)
stack.push(N, A);
}
}
mesh.Remove(T);
}
}
}
// Relevant triangles containing P[i] have been subdivided. Now
// process pairs of triangles that might need an edge swapped to
// preserve the empty circumcircle constraint.
while (stack is not empty) {
stack.pop(T, A);
// see Figure 13.45 to understand these indices
compute i0, i1, i2, i3 with T.v(i1)= A.v(i2) and T.v(i2)= A.v(i1);
if (T.v(i0) is in Circumcircle(A)) {
// swap must occur
N0 = mesh.Insert(T.v(i0), T.v(i1), A.v(i3));
B0 = A.adj(i1);
if (B0 is not null)
stack.push(N0, B0); now <N0,B 0> might need swapping
N1 = mesh.Insert(T.v(i0), A.v(i3), A.v(i2));
B1 = A.adj(i3);
if (B1 is not null)
stack.push(N1, B1); now <N1, B1> might need swapping
}
}
}
// remove any triangles that share a vertex from the supertriangle
mesh.RemoveTrianglesSharing(V(0), V(1), V(2));
}
760 Chapter 13 Computational Geometry Topics
A
0
T
A
1
A
2
A
0
A
1
A
2
N
1
N
2
N
0
B
1
B
0
T
1
T
0
A
1
A
0
B
1
B
0
N
1
N
0
M
0
M
1
A
1
A
0
(a)
(b)
Figure 13.45 (a) The newly inserted point P , shown as an unlabeled black dot, is interior to a triangle,
in which case the triangle is split into three subtriangles, or (b) it is on an edge of a
triangle, in which case each triangle sharing the edge (if any) is split into two subtriangles.
The function
Supertriangle computes the triangle described in the first para-
graph of this section. The
mesh object represents a triangle mesh stored as a vertex-
edge-triangle table. The mesh operation
Insert takes as input a triangle, either wholly
or as three indices into the set of vertices managed by the mesh. It returns a reference
to the actual triangle object inserted in the mesh so that the object can be used after
the call. The mesh operation
Remove just removes the specified triangle. The triangle
object
T is assumed to have an operation T.v(i) that allows you to access the index
of the mesh vertex that the triangle shares. The indices are ordered so that the trian-
gle vertices are counterclockwise ordered. The indexing is modulo 3, so
T.v(0) and
13.8 Delaunay Triangulation 761
T.v(3) are the same integer. The triangle object is also assumed to have an opera-
tion
T.adj(i) that returns a reference to the adjacent triangle that shares the edge
<T.v(i),T.v(i + 1)>. If there is no adjacent triangle to that edge, the reference is null.
The edge object
E is assumed to have an operation E.adj(i) that returns a reference
to an adjacent triangle (at most two such triangles).
Figure 13.46 shows the various quantities used in the pseudocode in the loop
where the stack of triangle pairs is processed. Theoretically, the loop can be infinite if a
triangle pair has all vertices on a common circumcircle. Here is where the typical con-
dition is specified by the computational geometers: no four points in the input set can
be cocircular. However, an implementation must guard against this when floating-
point arithmetic is used. It is possible that four points are not exactly cocircular, but
floating-point round-off errors can make the triangle pair behave as if the points are
cocircular. If such a pair is revisited in the loop, they might very well be swapped back
to their original configuration, and the entire process starts over. To avoid the infi-
nite loop, an implementation can evaluate both circumcircle tests, one for the current
triangle configuration and one for the swapped configuration. If both tests indicate
a swap should occur, then the swap should not be made. Be aware, though, that if
the circumcircle test accepts two adjacent triangles as input, additional care must be
taken to pass the triangles in the same order. Otherwise, the floating-point calcu-
lations involving the triangles might possibly cause the Boolean return value to dif-
fer. That is, if the function prototype is
bool FirstInCircumcircleOfSecond(Triangle,
Triangle)
, the calls FirstInCircumcircleOfSecond(T0,T1) and FirstInCircumcircle-
OfSecond(T1,T0)
might return different values. One way to obtain a consistent order-
ing is as follows. The two vertices that are opposite the shared edge of the triangles
have indices maintained by the mesh object. Pass the triangles so that the first triangle
has the vertex of the smallest index between the two triangles.
Once all the points are inserted into the triangulation and all necessary edge swaps
have occurred, any triangles that exist only because they share a vertex from the su-
pertriangle must be removed. Another potential pitfall here is that all triangles might
be removed. This is the case when the initial points all lie on the same line. If an
application really needs the incremental algorithm to apply to such a set (interpo-
lation based on a collection of data points is one such application), some type of
preprocessing must occur to detect the collinearity. Probably the best bet is to use
the relationship between the 2D Delaunay triangulation and the 3D convex hull that
is described later in this section. The convex hull algorithms appear to be better suited
for handling degeneracies due to the fact that the intrinsic dimensionality of the input
point set is smaller than the dimension of the space in which the points lie.
13.8.2 Incremental Construction in General Dimensions
An attempt at extending the 2D edge swapping algorithm to 3D has a couple of
technical issues to consider. The first involves the extension of the linear walk that
was used to find a containing triangle. Each input point P is inserted into the current
762 Chapter 13 Computational Geometry Topics
v(i
0
)
v(i
2
)v(i
1
)
v(i
3
)
T
A
B
0
B
1
v(i
0
)
v(i
2
)
v(i
3
)
v(i
1
)
B
0
N
0
N
1
B
1
Edge
swap
Figure 13.46 A triangle pair T , A that needs an edge swap. The index tracking is necessary so
that the correct objects in the vertex-edge-triangle table of the mesh are manipulated.
After the edge swap, up to two new pairs of triangles occur, N
0
, B
0
and N
1
, B
1
,
each pair possibly needing an edge swap. These are pushed onto the stack of pairs
that need to be processed.
tetrahedral mesh. A tetrahedron containing P is found using the same type of walk
that was used for the 2D problem. An initial tetrahedron is selected. If P is in that
tetrahedron, the walk is complete. If not, construct a ray whose origin is the average
of the current tetrahedron’s vertices, call it C, and whose direction is P − C.A
tetrahedron face that intersects the ray is located. The tetrahedron adjacent to the
current one and that shares this face is the next candidate for containment of P .
As it turns out, there are pathological data sets for which the walk can be quite
long (Shewchuk 2000). A 3D Delaunay triangulation can have O(n
2
) tetrahedra.
In the cited paper, it is shown that a line can stab O(n
2
) tetrahedra. In fact, for d
dimensions, a line can stab on the order of n
d/2
simplices.
The other technical issue is that the swapping mechanism does not have a coun-
terpart in 3D. The edge swapping in 2D was intuitively based on maximizing a mini-
mum angle, but that heuristic does not have a 3D counterpart (Joe 1991). The general
method is based on Watson’s algorithm (Watson 1981). The algorithm is described
for a point set contained in R
d
whose intrinsic dimensionality is d. That is, the point
set does not lie in a linear space of dimension smaller than d. Unfortunately, an im-
plementation must deal with degeneracy in dimension. A very good description of
the practical problems that occur with implementing Watson’s algorithm in 3D is
presented in Field (1986). This paper is available online through the ACM Digital
Library.
Because of the assumption of full dimensionality of the points, the elements of
the triangulation are nondegenerate simplices, each having d +1 points. The circum-
scribing hypersphere of a simplex will be called a circumhypersphere. The condition
13.8 Delaunay Triangulation 763
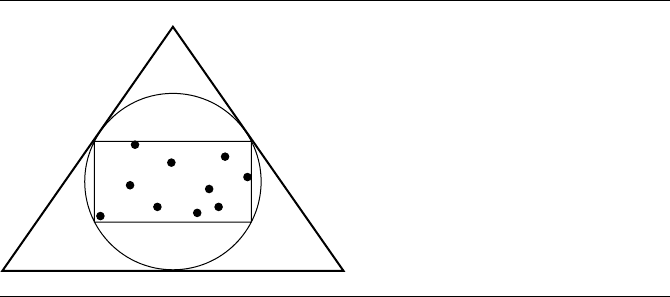
Figure 13.47 Supertriangle of the input point set.
for a Delaunay triangulation is that the circumhypersphere of a simplex does not
contain any input points other than the vertices of that simplex (the empty circum-
hypersphere constraint). The algorithm is described in steps. Following the excellent
presentation in Field (1986), the steps have associated figures that illustrate what is
happening in two dimensions.
1. Construct a supersimplex, a simplex that is guaranteed to contain the input points
as well as any circumhyperspheres in the final triangulation. A suitable choice is a
simplex that contains a hypersphere that itself contains the axis-aligned bounding
box of the input points (see Figure 13.47).
2. The supersimplex is added as the first simplex in a mesh of simplices. The
mesh maintains the vertices and all the necessary connectivity between simplices.
Moreover, the circumhypersphere for each simplex is stored to avoid having to
recalculate centers and radii during the incremental updates.
3. Insert the other input points, one at a time, and process as described here.
a. Determine which circumhyperspheres contain the given point. Here is where
the direct appeal is made to satisfying the empty circumhypersphere con-
dition. Before insertion, the empty condition is satisfied for all simplices.
When the point is inserted, the simplices corresponding to the circumhyper-
spheres that violate the empty condition must be modified. The search for
the containing hyperspheres is implemented as a search over simplices us-
ing the (attempted linear) walk described in earlier sections. But as pointed
out in Shewchuk (2000), the worst-case asymptotic order for the stabbing is
O(n
d/2
). Once the containing simplex (or simplices if the input point is on a
shared boundary component) is found, a depth-first search can be performed
to find other simplices whose circumhyperspheres contain the input point. A